

Применение георадарных технологий в дорожной отрасли регламентируется "Методическими рекомендациями по применению георадаров при обследовании дорожных конструкций", введенными в действие письмом Росавтодора № ОС-28/477 от 01.01.2001.
Методические рекомендации
_____________________________________________________
Методические рекомендации по применению георадаров при обследовании дорожных конструкций
_____________________________________________________
Министерство транспорта Российской Федерации
Государственная служба дорожного хозяйства Российской Федерации
(РОСАВТОДОР)
Москва 2003
Предисловие.
Разработано Государственным предприятием РОСДОРНИИ (канд. техн. наук ,), Архангельским Государственным техническим университетом (д-р техн. наук. , инж. , инж. ), (д-р техн. наук , канд. техн. наук ), (инж. ).
Внесено Государственной службой дорожного хозяйства Министерства транспорта Российской Федерации (Росавтодором).
3. Принято и введено в действие распоряжением Государственной службы дорожного хозяйства (Росавтодора) №___ от ___________2003 г.
4. Введено впервые.
5. Настоящие Указания разработаны в дополнение и развитие ОДН 218.0., ОДН 218.1., ВСН 24-88.
6. Настоящие указания содержат методику применения георадаров при обследовании дорожных конструкций.
Замечания и предложения просьба направлять по адресу:
г. Москва, Смольная ул., д. 2, ГП РОСДОРНИИ.
|
Содержание Предисловие………………………………………………………………………….. Введение………………………………………………………………………………. Область применения……………………………………………………………….… Нормативные ссылки………………………………………………………………... Определения………………………………………………………………………….. Принципы выбора георадаров для решения различных задач…………….….. Области применения георадаров…………………………………………….…. Правила работы с георадарами…………………………………………………. 3.1. Полевые работы. Общие положения……………… …..…………………….… 3.2. Установка начальных параметров перед измерениями…………………..…... 3.3 Возможные режимы работы георадара……………………………………… 3.4. Запись радарограмм……………..……………………………………………….3.5 Контрольные бурения ……………………………………………………………4. Рекомендации по обработке и интерпретации результатов измерений….….. 4.1. Основные положения по обработке радарограмм….……………………..…… 4.2. Основные принципы интерпретации радарограмм.……………………… 4.3. Методика послойной обработки радарограмм…….…………………………… 4.4. Материалы, представляемые заказчику…..….………………………………… 5. Рекомендуемый состав отряда по обследованию автомобильных дорог георадарными методами……………..…….…………………………………….. 6. Рекомендации по калибровке георадара…………………..…………………….. 7. Основные правила техники безопасности при работе с георадарами……….... 8.Основные технико-эксплуатационные показатели при работе с георадарами………………………………………………………………………...… 9.Основные эксплуатационные характеристики георадаров, применяемых в России ………………………………………………………………………………... Список литературы…………………………………………………………………... Приложение…………………………………………………………………………... |
2 4 5 5 5 6 8 9 9 11 12 13 14 14 14 21 27 28 28 30 32 33 35 37 38 |
Введение
Перед появлением видимых разрушений дорожного покрытия внутри дорожной одежды или земляного полотна протекают скрытые процессы (образование пустот, заиление дренирующих слоев, переувлажнение грунта земляного полотна, инфильтрация грунтовых вод и т. п.), своевременное выявление которых позволило бы вовремя принимать соответствующие меры. Обычно состояние дорожной одежды оценивают по кернам, полученным в результате ее бурения керноотборником, либо по результатам испытаний приборами динамического и статического нагружения, описанными в ОДН 218.0., ОДН 218.1.. Указанные методы не позволяют получать непрерывную информацию о толщине и состоянии конструктивных слоев дорожной одежды и грунтов земляного полотна.
В настоящее время в условиях ограничения средств на диагностику дорожных конструкций для последующего планирования ремонта и реконструкции автомобильных дорог особую актуальность приобретают экономичные и мобильные методы обследований дорожных конструкций, основанные на использовании приборов неразрушающего контроля. В России подобные приборы широко применяются, например, в геофизике. Однако, как показывает практика, для использования их на автомобильных дорогах необходимы методические рекомендации по применению георадаров для обследования дорожных одежд и грунтов земляного полотна.
С 1998 года в дорожной отрасли страны накоплен ценный опыт по практическому применению совершенных конструкций георадаров. На основе проделанной работы получены представления об основных требованиях, которые должны предъявляться к техническим характеристикам таких приборов. На основе сопоставительных испытаний георадаров, применяемых в России, разработаны рекомендации по выбору приборов, методика обследования автомобильных дорог, а также предложены основные приемы обработки и интерпретации данных. Установлено, что такие приборы позволяют определять границы и толщину слоев дорожных одежд, выявлять зоны увлажнения грунтов, инородные включения в грунте, пространственные очертания подошвы слоев, пути инфильтрации грунтовых вод, а также - дефекты, допущенные в процессе дорожных работ.
Настоящие рекомендации являются первым отраслевым документом, предназначенным для оказания методической помощи на начальном этапе освоения георадиолокационного метода.
Методические рекомендации по применению георадаров при обследовании дорожных конструкций
Область применения
Настоящие рекомендации предназначены для применения в проектных, научных и эксплуатационных подразделениях дорожной отрасли при освоении и внедрении георадарных технологий. В настоящем документе изложены основные принципы выбора прибора и правил работы с ним, а также методы обработки данных. Методические рекомендации предназначены для использования в дорожной отрасли, например, при диагностике, обследованиях неблагополучных участков автомобильных дорог, инженерно-геологических и инженерно-гидрологических изысканиях при разработке проектов ремонта и реконструкции автомобильных дорог и контроле качества выполненных работ.
Методические рекомендации предназначены для инженерно-технических работников, занимающихся обследованием дорог георадарными методами и обладающими начальными навыками работы с георадарами.
Нормативные ссылки
В настоящем документе использованы ссылки на следующие нормативные документы: в ОДН 218.0. «Правила диагностики и оценки состояния автомобильных дорог», ОДН 218.1. «Оценка прочности нежестких дорожных одежд».
Определения
В настоящем документе используются следующие термины:
Георадар – устройство, предназначенное для получения трансформированного разреза исследуемой среды. Георадар состоит из одной или нескольких антенн, излучающих и принимающих электромагнитные сигналы, генератора, приемника и компьютера.
Выборка - единичное значение амплитуды отраженного импульса в определенный момент времени.
Реализация – последовательная совокупность выборок, зарегистрированных георадаром за определенный период времени, соответствующий прохождению электромагнитного импульса вглубь среды и его возвращению от отражающих границ.
Радарограмма - совокупность реализациий, формирующая непрерывный временнóй разрез изучаемой среды. Это электрофизическая модель изучаемой среды.
Интерпретация результатов - процесс синтеза электрофизической модели и построение разреза дорожной конструкции.
ось синфазности - линия, соединяющая одинаковые фазы разных реализаций.
Принципы выбора георадаров для решения различных задач
1.1 Для комплексного обследования дорожных конструкций при определении толщины конструктивных слоев дорожной одежды, а также мощности и состояния грунтов земляного полота и подстилающего основания, требуются георадары с различными типами антенн, работающих на разных частотах. Частотные характеристики антенн должны быть приведены в паспорте на георадар, при этом обязательно указывается центральная частота, на которой работает антенна в воздухе. При наличии данных для других сред, должны указываться их название и диэлектрическая проницаемость. Измерения необходимо выполнять в соответствии с инструкцией по эксплуатации применяемой конструкции георадара.
1.2 Грунтовые (контактные) антенны, непосредственно соприкасаются с поверхностью земли или дорожным покрытием, как правило, работают на частоте от 50 МГц до 1500 МГц. Они обеспечивают скорость движения при сборе данных, в зависимости от шага реализаций, от минимально возможной до 20 км/час. Дальнейшее увеличение скорости перемещения антенн при измерениях, может приводить к повреждению контактных антенн, особенно при наличии выбоин на покрытии. Георадары с такими антеннами эффективно используются для определения толщины слоев основания дорожной одежды и грунтов земляного полотна на глубину от 0,20 до 10 м.
1.2 Рупорные (бесконтактные) антенны, располагаются на высоте 0,4-0,7 м от поверхности исследуемой среды. Данные антенны, как правило, работают на частоте от 250 МГц и выше, а скорость движения по дороге при измерении зависит только от быстродействия каналов обмена информацией и может достигать 50 км/час. Георадары с такими антеннами эффективно используются для определения толщины покрытия и слоев основания дорожной одежды на глубину от 0,2 до 3 м.
1.3 Для выполнения обследований дорог наиболее целесообразно иметь передвижной измерительный комплекс, включающий базовый автомобиль-лабораторию, оснащенный одной - двумя рупорными и двумя – тремя грунтовыми антеннами, видеосистемой, аппаратурой для измерения ровности покрытия и пройденного пути, несущей способности дорожной конструкции (прибор динамического нагружения), бурового оборудования /1,2/.
1.4 В зависимости от центральных частот приборов определяются назначение, разрешающая способность и глубина зондирования среды (таблица 1).
1.5 Основные рекомендации по выбору георадаров:
георадары с рупорными антеннами целесообразно использовать для определения толщины слоев дорожной одежды и верхней части земляного полотна, в сочетании с автомобилем, при обследовании участков автомобильных дорог большой протяженности, в том числе, в движущемся транспортном потоке.
георадары с грунтовыми антеннами целесообразно использовать при работе для определения толщины нижних слоев дорожной одежды, обследовании грунтов земляного полотна и подстилающего основания, сканировании дорожных конструкций в поперечном направлении. При этом буксировку георадара выполняют вручную или с помощью автомобиля;
Для достижения наибольшей эффективности работ рекомендуется применять комплекс приборов, оснащенных рупорными и грунтовыми антеннами;
- В настоящее время разработаны универсальные антенны, которые могут работать как в контакте с поверхностью, так и с отрывом от нее на расстояние 0,05 – 0,1 м при уменьшении глубины зондирования.
Таблица 1 - Глубина зондирования на различных частотах.
|
Техническая характеристика |
Центральная частота, МГц | ||||
|
150…250 |
400…500 |
700…900 |
1000…1500 |
1500…2500 | |
|
Максимальная глубина зондирования, м |
3…15 |
2,0…5 |
1,0…3 |
0,5…1,5 |
0,2…0,7 |
|
Разрешающая способность, м |
0,25…0,35 |
0,12…0,15 |
0,05…0,07 |
0,01…0,05 |
0,005…0,01 |
|
Назначение |
Для определения мощности и влажности грунтов и дефектов в грунтах земляного полотна и подстилающего полупрост-ранства на участках преимущественно Ш типа местности по увлажнению и фиксации УГВ |
Для опреде - ления мощности и влажности грунтов и дефектов в грунтах земляного полотна и подстила-ющего полу-пространства, определения толщины нижних слоев основания дорожной одежды при любом типе местности по увлажнению, а также фиксации УГВ |
Для опреде - ления тол- щины слоев основания дорожной одежды и состояния грунтов рабочего слоя земляного полотна при любом типе местности по увлажнению, а также - фиксации УГВ |
Для опреде - ления толщины слоев покрытия и основания дорожной одежды и оценки качества их уплотнения. |
Для определе-ния толщины монолитных слоев дорожной одежды и оценки качества их уплотнения. |
В таблице 1 меньшие значения глубины приведены для влажных и глинистых грунтов, а большие – для сухих и песчаных.
1.6 Ведущими зарубежными фирмами, занимающимися производством георадаров, являются GSSI (Нью Гемпшир, США), Sensor and Software Inc. (Канада), Era Technology (Великобритания), Mala (Швеция), Radar Systems (Латвия), OYO corporation (Zgjybz) и Geozondas (Литва).
Компания GSSI выпускает георадары с маркировкой Sir systems с модификациями Sir systems –2, -2Р, -3, 3R, 3I, -10А, - 10Н, -10В, 2000 и т. д.
Компания Sensor and Software производит новейшие георадарные системы EKKO и Noggin различных модификаций.
Компания Radar Systems производит георадары «Зонд» различных модификаций. В настоящее время выпускает георадар «Зонд-12с» с набором различных антенных блоков.
В России, для решения задач дорожной отрасли, наиболее известны георадары серий «ОКО», «ЗОНД», «ГРОТ» и «ДРЛ», характеристики которых представлены в таблицах 7-9.
2 Области применения георадаров
Область применения георадаров зависит от особенностей, изложенных в п. 1 и определяется целями и задачами обследований. Георадары рекомендуется применять для решения следующих задач:
проверка толщины конструктивных слоев дорожной одежды и толщины слоев грунта земляного полотна, а также оценка однородности дорожно-строительных материалов;
оценка качества уплотнения и влажности грунтов земляного полотна;
определение поперечных и продольных уклонов подошвы подстилающего грунта;
оценка однородности используемого грунта, как при приемке выполненных работ, так и при эксплуатации дорог для оценки состояния дорожной конструкции и назначения ремонтных мероприятий;
- определение глубины залегания уровня грунтовых вод и размеров переувлажненных зон грунта земляного полотна для оценки эффективности работы дренирующих устройств;
определение мощности слабых грунтов, подстилающих земляное полотно и выявление дефектов в дорожной одежде и грунтах земляного полотна (пустоты, зоны разуплотненных грунтов и инфильтрации воды, зоны переувлажненных грунтов, и т. д.) в процессе эксплуатации автомобильной дороги;
мониторинговые наблюдения за состоянием дорожной одежды и земляного полотна с целью наблюдения за распределением глубины промерзания и оттаивания грунтов, а также изменением их влажности, глубиной залегания грунтовых вод в процессе эксплуатации автомобильной дороги и т. п.
3 Правила работы с георадарами
3.1 Полевые работы. Общие положения
3.1.1. Перед выполнением работ в полевых условиях, оборудование, предназначенное для измерений, должно быть проверено в лаборатории. Необходимо ознакомиться со всей имеющейся геологической документацией. Рекомендуется до начала измерений ознакомиться с объектом, проведя рекогносцировку. Если известны грунтово-гидрогеологические разрезы на привязанных точках местности, в этих местах целесообразно до выполнения работ получить радарограммы. Если есть вскрытые геологические разрезы с включением данной точки (кромка забоя карьера, кромка выемки и т. д.), то следует предварительно получить радарограммы на этих участках. Эти радарограммы позволят скорректировать установку начальных параметров георадара и избежать в дальнейшем, ошибок при интерпретации данных.
3.1.2 Применение георадара имеет ограничения в зависимости от условий проведения работ и природно-климатических факторов. Эти ограничения должны содержаться в руководстве по эксплуатации прибора. Наиболее общие из них следующие:
Как правило, георадары допускается эксплуатировать при температуре окружающего воздуха от + 40 до – 40 градусов. В наибольшей степени температурный фактор оказывает влияние на работу компьютера. При использовании обычного компьютера (ноутбук), в период работы при отрицательных температурах, он должен находиться в кабине автомобиля или вездехода, где температура воздуха должна быть выше той, при которой не разрешается эксплуатация компьютера (обычно в пределах 0…50С).
При использовании георадаров с контактными антеннами, не желательно проводить измерения в дождливую погоду, так как в случае нарушения герметизации антенных блоков, возможен выход из строя электронного оборудования. По той же причине не рекомендуется протягивать антенные блоки по лужам. Допускается работа с бесконтактными антеннами во время дождя, однако при этом следует учитывать, что мощность отраженного от поверхности покрытия сигнала будет значительно выше, а глубина сканирования меньше.
Не допускается контакта прибора с засоленными грунтами и соленой водой.
3.1.3 Технология выполнения работ определяется следующими основными факторами:
целями и задачами обследований,
конструкцией георадара,
используемым транспортным средством,
количеством применяемых одновременно антенн,
интенсивностью движения по существующей дороге,
состоянием поверхности обследуемого сооружения и шириной проезжей части.
3.1.4 При использовании автомобиля или другого быстроходного транспортного средства георадарные обследования проводятся в продольном направлении, по одной или двум полосам движения. Количество обследуемых полос назначается заказчиком. Рекомендуемая скорость сканирования выбирается в соответствии с инструкцией по эксплуатации прибора и заданным шагом сканирования. Оптимальным вариантом является использование многоканальной системы с 3-4 антеннами, полностью перекрывающими полосу движения, так как это позволяет получить геологический разрез, как в продольном, так и в поперечном направлении.
3.1.5 При перемещении георадара ручной транспортировкой (скорость 2…5 км/час) обследования проводятся преимущественно одной антенной или двумя, отличающимися по частоте (применяемыми попеременно), как правило, на небольших по протяженности участках дорог (1…2 км). При этом измерения на участках автомобильных дорог, имеющих плохое состояние покрытия, проходящих по косогорным в поперечном профиле участкам проводятся не только в продольном, но и в поперечном направлении (от одной бровки земляного полотна до другой). Расстояние между измерениями в поперечном направлении определяется поставленной задачей и состоянием дорожной конструкции, при этом количество поперечников может изменяться от 3 до 50 на 1 км дроги. При выполнении частых измерений в поперечном направлении (более 20 поперечников на 1 км) допускается не проводить измерения по двум полосам движения.
На автомобильных дорогах II-IY категорий (двухполосных дорогах), как правило, при наличии автотранспортного средства, замеры производятся непрерывно, сначала в прямом направлении по одной полосе движения, а затем в обратном - по другой полосе движения. На автомобильных дорогах I технической категории чаще всего достаточно выполнить измерения по одной полосе в одном направлении и по одной полосе в обратном направлении. В поперечном направлении целесообразно проводить измерения с шагом через 20…500 м в зависимости от состояния автомобильной дороги.
Допускается проводить георадиолокационное сканирование дорожных конструкций в поперечном направлении с использованием автомобиля. Работу следует выполнять при строгом соблюдении правил техники безопасности.
Установка начальных параметров
3.2.1 В зависимости от модели применяемого георадара, в качестве исходной информации следует вводить шаг между реализациями или шаг датчика пути; число точек отсчета, приходящихся на каждую реализацию; развертку по глубине; количество усредняемых реализаций (количество накапливаемых отсчетов); величину сдвига реализации и коэффициент усиления, а также диэлектрическую проницаемость среды, которую выбирают в соответствии с рекомендациями, представленными в таблице 2.
Таблица 2 – Диэлектрические показатели различных материалов
Материал |
Диэлектрическая проницаемость |
Проводимость, симменс/м |
|
Дорожная конструкция Горная порода Глина Суглинок Песок Торф влажный Морена Ил Металл Лед Вода Воздух |
5…10 4…10 4…16 2,5…19 3…25 50…78 9…25 9…23 1…2 3…4 80…81 1 |
0,0002…0,00002 0,01…0,00001 0,05…0,0002 0,021…0,00011 0,007…0,00002 0,002…0,001 0,01…0,0001 0,001…0,0001 1000000 0,001 0,002…0,001 0 |
Примечание: минимальные значения диэлектрической проницаемости относятся к сухому материалу, максимальные – к водонасыщенному.
3.2.2 Шаг между реализациями назначается в зависимости от поставленной задачи, быстродействия аппаратуры, длины записываемого профиля, типа и скорости движения транспортного средства, а также требуемой глубины измерений. При короткой длине профиля (до 50 м) и малой скорости, шаг между реализациями следует назначать минимальным - 0,1….0,2 м, при большой длине профиля (500…1000 м) и высокой скорости движения, шаг между реализациями следует назначать от 0,3 до 2,5 м. При малой глубине сканирования (до 1,5 м), шаг между реализациями также должен быть небольшим и составлять 0,05…0,20 м, а при большой глубине (более 20 м), шаг между реализациями может быть увеличен до 0,5…2,5 м. Количество усредняемых реализаций (накапливаемых отсчетов) зависит от требуемой детальности изучения конструкции, а также шага между реализациями. При малом шаге между реализациями обычно задают 4…8 накапливаемых отсчетов, при большом - 8…16.
3.2.3 Развертка по глубине задается в соответствии с таблицей 3. Меньшее время развертки позволяет повысить качество сканирования, большее время развертки увеличивает глубину зондирования.
Таблица 3
|
Центральная частота, МГц |
150…250 |
400 |
500 |
700 |
1200 |
1500…2500 |
|
Развертка, нс |
200…400 |
100…250 |
50…200 |
50…1000 |
25…50 |
20…30 |
3.2.4 До начала движения необходимо отрегулировать вертикальное смещение сигнала, оценить сигнал по амплитуде, форме (очертанию) и затуханию по глубине. Затем необходимо найти сигнал прямого прохождения и определить поверхность исследуемой среды. Далее, с помощью опции сдвига, следует приблизить сигнал прямого прохождения к верхнему краю рабочего окна компьютера.
При малой амплитуде сигнала (менее ¼ от полной шкалы) или затухании на малой глубине (что имеет место в глинистых и суглинистых влажных грунтах), следует предусмотреть его усиление.
При негладком сигнале необходимо устранить неисправности в аппаратуре, уменьшить усиление с помощью опции «ВАРУ» или увеличить число усреднений.
3.3 Возможные режимы работы георадара
3.3.1 В зависимости от конструкции георадара, программного обеспечения к нему и решаемой задачи, при выполнении обследований различают несколько режимов работы: запись реализаций «по времени» («непрерывно»), запись «по сигналам с датчика пути» (или «по смещению»), работа «по шагам».
3.3.2 Режим «по времени» или «непрерывно» предусматривает сканирование среды в автоматическом режиме. При достижении набора заданного количества реализаций или заполнения отведенного объема памяти, их прием заканчивается. Такой режим можно рекомендовать при обследовании автомобильных дорог как в продольном, так и в поперечном направлении. Время непрерывной записи в таком режиме определяется особенностями применяемого георадара. При этом георадар должен перемещаться по поверхности равномерно и работы выполняются без измерительного колеса или датчика пути.
3.3.3 Режим «по сигналам с датчика пути» или «по смещению» предусматривает зондирование среды в автоматическом режиме, в процессе перемещения антенного блока по поверхности. Расстояние между реализациями отсчитывается автоматически с помощью дополнительного датчика пути или измерительного колеса. При этом каждому импульсу датчика пути соответствует одна реализация. По достижении допустимого количества реализаций прием сигналов прекращается.
3.3.4 Режим «по шагам» используется при выполнении обследований в заранее отмеченных точках поверхности (как правило, местах разрушений, при наличии поперечных трещин и т. д.), передвижение осуществляется «от точки к точке», в каждой из них производится остановка прибора и измерение. Такой режим можно использовать при обследовании автомобильных дорог, как в продольном, так и поперечном направлении при перемещении антенного блока «от точке к точке».
3.4. Запись радарограмм
3.4.1 В зависимости от выбранного режима работы ( см. п. 3.3) и учитывая особенности программного обеспечения георадара, осуществляют запись информации в файл. При этом необходимо контролировать процесс записи на экране компьютера.
3.4.2 При сканировании, на экране компьютера, по ходу перемещения георадара, отображается радарограмма, на которой фиксируются линии синфазности в виде черно-белых или цветных полос, а также возникающие при записи шумы и помехи. На радарограмме, как правило, указывается расстояние проходимое георадаром, глубина зондирования, время прохождения сигнала и специальные метки.
3.4.3 С помощью специальных меток осуществляется «привязка» радарограммы к ситуации (километровые знаки, пересечения, остановки, автозаправочные станции, водопропускные трубы и т. д.). При обследовании дорожных конструкций целесообразно отмечать особенности, характеризующие состояние автомобильной дороги (поперечные и продольные трещины, просадки покрытия, сетка трещин, выбоины и т. д.). Метками следует также отмечать и помехи (автомобили, ЛЭП и др.), если они оказывают влияние на показания георадара.
3.4.4. После завершения сканирования по выбранному профилю, если при просмотре результаты съемки не требуют повторного сканирования, осуществляется сохранение радарограммы в памяти компьютера.
3.5 Контрольные бурения
3.5.1 Для отбора проб рекомендуется использовать мотобур или ручной бур геолога.
3.5.2 Контрольные бурения должны производиться обязательно. Они выполняются с целью определения диэлектрической проницаемости материалов и грунта каждого слоя дорожной конструкции, что позволяет выполнить тарировку шкалы глубин на записанных радарограммах, тем самым уменьшить погрешность измерений при интерпретации полученных радарограмм.
3.5.3 Контрольное бурение может выполняться до сканирования, в процессе сканирования и после сканирования. Если сведения о конструкциях неизвестны, то контрольное бурение можно выполнить до сканирования. Для этого необходимо записать радарограмму на коротком участке, выделить на ней однородный участок, отметить его на местности и выполнить контрольное бурение. По результатам бурения вносятся коррективы в установку начальных параметров георадара.
При проведении контрольного бурения в процессе сканирования или после сканирования буровые скважины выполняются преимущественно в тех местах, которые вызывают затруднения при интерпретации.
3.5.4 Частота контрольного бурения определяется грунтово-гидрогеологическими условиями и может быть установлена в зависимости от требований заказчика к погрешности определения параметров внутреннего строения дорожных конструкций.
3.5.5 Для обеспечения минимальной погрешности определения глубины заложения и толщины слоев (до 2%), необходимо сделать не менее 2-5 контрольных скважин на 1 км дороги (в зависимости от грунтово-гидрогеологических условий и степени однородности обследуемого участка). При погрешности до 5 % достаточно 1-2 скважины на 1 км, при погрешности до 10 % не менее 1-2 скважин на 3…5 км.
4 Рекомендации по обработке и интерпретации результатов измерений
4.1 Основные положения по обработке радарограмм
4.1.1 Задача интерпретации должна формулироваться заказчиком и согласоваться с исполнителем работ в виде точного и конкретного задания. Задание должно содержать сведения о требуемой глубине и детальности изучения разреза, с указанием вертикального и горизонтального масштабов результативного разреза, а также точности его топографических привязок. При этом необходимо сформулировать, какие характеристики состояния материалов дорожной одежды и грунтов земляного полотна следует отразить на разрезе, построенном по данным ГРЛЗ.
4.1.2 Процесс обработки данных представляет собой выполнение набора формализованных процедур, которые интерпретатор применяет для повышения качества полевых материалов и для выделения на георадарограммах полезных волн от основных рефлекторов (отражающих границ), к которым относятся границы конструктивных слоев дорожной одежды и земляного полотна, а также локальные неоднородности. Результатом обработки является георадарограмма, на которой с максимально возможной отчетливостью отражается структура инженерно-геологического разреза дорожной конструкции и подстилающих грунтов.
4.1.3 Интерпретация сводится к решению обратной физико-математической задачи, в результате чего формируется электрофизическая модель, а затем - разрез дорожной конструкции. На этом этапе, с учетом данных бурения, определяются скорости распространения электромагнитных волн в слоях и определяются их толщины. Решение обратной задачи осуществляется обычно в несколько этапов, каждый из которых содержит стадии обработки и интерпретации.
4.1.4 Обработку полевых радарограмм выполняют в случае, если волны-помехи затрудняют выявление и прослеживание полезных волн. При этом следует учитывать, что в результате обработки неизбежно теряется часть информации, в том числе и полезной.
4.1.5 Процедуру обработки подразделяют на два этапа: предварительную обработку и информационный анализ. В рамках каждого из этих этапов решаются различные задачи. Предварительная обработка предназначена для подготовки полевых материалов к информационному анализу, который в свою очередь нужен для подготовки георадарограмм к основному этапу интерпретации.
4.1.6 Предварительная обработка включает выполнение следующих процедур:
- удаление реализаций или выявление интервалов реализаций с бракованной записью;
- выбор нулевой линии отчета по глубине (определение поверхности исследуемой среды);
- привязка георадарограмм к картографической подоснове и их масштабирование;
- коррекция (регулировка) амплитуд волн;
- фильтрация аппаратурных электрических шумов систематического и случайного характера.
а) Удаление реализаций или выявление интервалов реализаций с бракованной записью рекомендуется выполнять следующим образом.
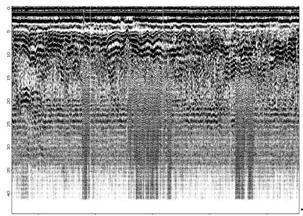
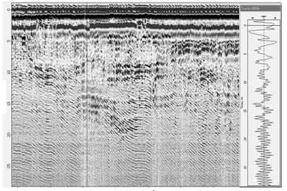
Реализации с бракованной записью характеризуются искажениями двух типов (рисунок 1). Тип 1 – это резкое изменение амплитуды регистрируемых волн по сравнению с соседними трассами. Тип 2 проявляется в виде импульсов, амплитуда которых «зашкаливает» за динамический диапазон усилительно-регистрирующего тракта георадара.
 | |
|
Искажения реализаций типа 1, как правило, возникают при работе с контактными антеннами вследствие увеличения воздушного зазора между антенной и поверхностью наблюдений, обусловленного неровностями. Такие единичные реализации подлежат исключению, так как приводят в процессе дальнейшей обработки к формированию ложных аномалий.
Искажения записей типа 2 обычно обусловлены высоким усилением сигнала при начальной установке параметров. Эти искажения создают проблемы при обработке георадарограмм цифровыми фильтрами. Некоторые типы фильтров, в частности обратные, не могут корректно преобразовывать «зашкаленные» реализации. Поскольку на георадарограммах такие записи, как правило, объединяются в области, их исключение нецелесообразно, так как приводит к большим потерям полезной информации. Реализации данного типа, следует фиксировать в журнале обработки, как проблематичные и учитывать при анализе результатов последующей цифровой фильтрации.
б) Выбор нулевой линии отсчета по глубине является необходимой процедурой, если в процессе съемки отмечается изменение координаты максимума прямой волны на георадарограмме. Как правило, это изменение носит линейный характер и обычно связано с недостаточным прогревом прибора перед началом съемки. Исключение перемещения нулевой линии обеспечивает процедура ввода статической поправки, например, с помощью специальной утилиты из пакета программной обработки данных.
в) Привязка георадарограмм к картографической подоснове и их масштабирование следует обязательно выполнять при обработке радарограмм, полученных при записи «по времени» с изменяющейся скоростью перемещения прибора (см. п.3.3.2). Процедура масштабирования сводится к получению георадарограммы, на которой расстояние между реализациями устанавливается постоянным и равным определенной величине. В зависимости от типа георадара масштабирование может осуществляться в автоматическом режиме, с помощью датчика пути или вручную, с помощью специальной утилиты, содержащейся в специальном пакете программ.
г) Коррекцию (регулировку) амплитуд волн применяют для сжатия или растяжения динамического диапазона зарегистрированных колебаний и выравнивания их интенсивности. Необходимость применения этой процедуры связана с затуханием импульсов георадара с глубиной. Регулировка усиления может быть выполнена в двух вариантах: программном или автоматическом. Первый вариант предусматривает восстановление и использование на всех последующих этапах обработки истинной интенсивности электромагнитных волн. Второй вариант обработки не предусматривает сохранения относительных амплитуд сигналов.
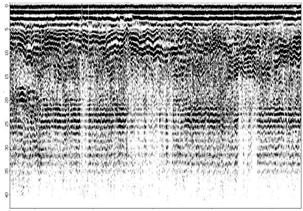
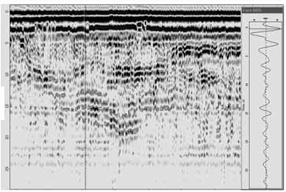
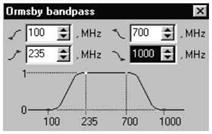
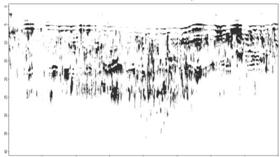
д) Фильтрация аппаратурных электрических шумов систематического и случайного характера выполняется при проявлении на георадарограммах в виде параллельных осей синфазности (“звон”) или в виде высокочастотной составляющей (“дождь”) (рисунок 2).
Наличие «звона» наблюдается при работе с неэкранированными антеннами или обусловлено влиянием электрического кабеля, соединяющего антенну с радаром. Одним из способов удаления звона является вычитание среднего сигнала из каждой трассы. Однако при обработке радарограмм, отражающих конструкцию дорожной одежды возможна потеря значительной части информации.
Высокочастотные помехи случайного типа (“дождь”), как правило, связаны с работающими вблизи радиостанциями или передатчиками. Наиболее эффективным средством удаления случайных помех является процедура осреднения реализаций. Обычно осреднение выполняют в интервале от 3 до 16 реализаций. Если частота помех превышает максимальную частоту спектра полезного сигнала, то для их подавления может быть использован вертикальный цифровой фильтр низких частот.
![]()
|
|

а)
![]()
![]()
![]()
б) в)
Георадарограммы: а) исходная; б) и в) после последовательной фильтрации
помех случайного и систематического типов соответственно.
Рисунок 2 - Фильтрация аппаратурных электрических помех систематического и случайного типов
4.1.7 Для обнаружения, отождествления и прослеживания регулярной полезной волны на георадарограмме (оси синфазности), соответствующей границе раздела слоев применяют цифровую фильтрацию, которая бывает двух видов: частотная и пространственно-времення. - Частотная фильтрация электромагнитных волн является одним из основных средств выделения полезных волн. Она применяется для обработки отдельных реализаций, наблюдаемых во времени (иногда ее называется временнóй фильтрацией).
- Пространственно-временная фильтрация применяется для обработки совокупности реализаций георадарограммы в двумерном информационном окне. Пространственно-временной фильтр позволяет различать и фильтровать электромагнитные волны не только по динамическим, но и по кинематическим характеристикам.
- Частотная фильтрация электромагнитного волнового поля выполняется с целью увеличения отношения сигнал/помеха путем избирательного подавления мешающих компонент в спектре регистрируемых волн.
4.1.8 Проведению фильтрации должен предшествовать визуальный анализ регистрируемой волновой картины с целью обнаружения на георадарограммах участков с преобладанием полезных волн и помех. Далее, с помощью прикладного программного обеспечения, выполняется спектральный анализ этих участков.
4.1.9 Для фильтрации георадарограмм используются простые типы линейных граничных и полосовых фильтров с трапециевидной формой амплитудных характеристик.
4.1.10 Для фильтрации георадарограмм, как правило, достаточно использовать простые типы линейных граничных и полосовых фильтров с трапециевидной формой амплитудных характеристик. Параметрами процедуры являются: тип фильтра, полоса пропускания и крутизна среза частотной характеристики.
4.1.11 Фильтрация наиболее эффективно работает в том случае, когда частотный спектр полезного сигнала и помехи не перекрываются или перекрываются незначительно. При обработке используют следующие типы линейных граничных и полосовых фильтров:
Простой полосовой фильтр предназначен для подавления низкочастотных помех и высокочастотных составляющих сигнала.
- Косинусный полосовой с косинусной аппроксимацией частотной характеристики между точками подавления и пропускания. Использование этого фильтра является более предпочтительным, так как в меньшей степени искажает сигнал.
- Режекторный фильтр - применяется для подавления узкополосной помехи на фоне широкополосного сигнала при перекрытии спектров сигнала и помехи.
Выбор типа и параметров фильтра выполняет интерпретатор на основе визуального анализа и сопоставления разных вариантов фильтрации георадарограмм.
4.1.12 Следует последовательно применять такие фильтры, которые позволяют получать полезные волны с наиболее протяженными осями синфазности и бо́льшую амплитуду.
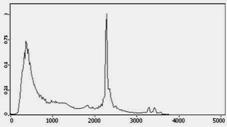
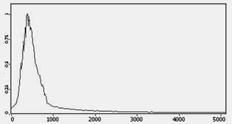
4.1.13 Критерием оптимальности вида фильтрации является получение более короткого, чем исходный сигнал, отраженного импульса от основных границ конструктивных слоев дорожной одежды. Результатом применения этого вида обработки является георадарограмма, на которой четко проявляется положение границ конструктивных слоев.
![]()
![]()
а) б)
|
|

|
|
в) г)
д)
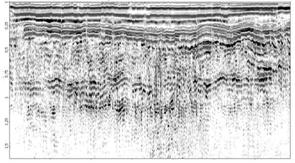
а) исходная георадарограмма, б) георадарограмма после частотной фильтрации
косинусным полосовым фильтром, в) средний энергетический спектр сигнала до фильтрации; г) средний энергетический спектр сигнала после фильтрации; д) форма и параметры фильтра.
Рисунок 3 – Результат обработки радарограммы косинусным полосовым фильтром
4.1.14 Повышение разрешающей способности во времени реализуется за счет использования фильтров сжатия, основанных на процедуре деконволюции, т. е преобразовании радиосигнала в видеосигнал. С помощью деконволюции сокращается длина отраженного импульса, что повышает возможность детального изучения разреза и выделения отражений от близко расположенных границ или объектов.
4.1.15 Рекомендуется использовать оптимальный обратный и прогностический фильтры. Первый фильтр обеспечивает сжатие сигналов известной формы в короткие импульсы. А второй - предусматривает исключение реверберационных волновых эффектов, т. е. кратных отражений. Второй тип деконволюции рекомендуется при обследовании автомобильных дорог, построенных с использованием контрастных по диэлектрической проницаемости материалов.
4.1.16 Этот вид фильтрации используется для выявления локальных неоднородностей, связанных с изменениями состава и влажности грунтов, а также для выделения месторасположения инженерных сетей Пространственно-временная фильтрация позволяет установить степень однородности материала конструктивных слоев дорожной одежды и земляного полотна по маршруту движения георадара.
4.1.17 Пространственно-временная фильтрация выполняется в двумерном скользящем информационном окне. Размеры окна задаются двумя параметрами - шириной и высотой. Ширина окна определяется по горизонтальной оси георадарограммы в метрах или реализациях, а его высота задается по вертикальной оси в единицах времени, количестве выборок или глубиной в метрах. В этом случае фильтр называется двумерным (2D).
4.1.18 При пространственно-временной фильтрации георадарограмма обрабатывается по горизонтальной линии, соответствующей одному значению времени прихода электромагнитной волны. Такие фильтры называются горизонтальными.
4.1.19 Современные компьютерные обрабатывающие системы, как правило, должны обеспечивать выполнение пространственной фильтрации в двух режимах: низкочастотной и высокочастотной. Фильтр низких частот предназначен для выделения сигналов, незначительно изменяющихся вдоль линии профиля, например, от границ слоев, и подавления локальных возмущений электромагнитных волн. Фильтр высоких частот предназначен для выделения локальных возмущений электромагнитных волновых полей за счет подавления сигналов, отраженных от границ конструктивных слоев дорожной одежды.
4.2 Основные принципы интерпретации радарограмм
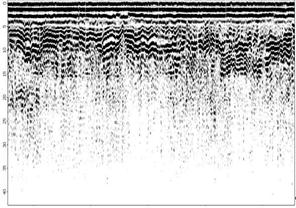
4.2.1 Интерпретация результатов представляет собой процесс построения разреза дорожной одежды и складывается из двух основных этапов: кинематической и динамической (рисунок 4).
4.2.2 Кинематическая интерпретация позволяет по зарегистрированным временам полезных волн восстанавливать положение границ и распределение скоростей электромагнитных волн в слоях дорожной конструкции. Суть кинематической интерпретации состоит в преобразовании временного разреза в глубинный путем преобразования георадарограммы в электрофизическую модель разреза дорожной одежды. Для построения этой модели необходимо определить геометрические (толщины) и электрофизические (скорости распространения электромагнитных волн) параметры слоев дорожной одежды и земляного полотна. Для решения этой задачи необходимы достоверные данные бурения.
Кинематическая интерпретация включает два этапа:
построение временного разреза;
преобразование временного разреза в глубинный.
а) Построение временного разреза базируется на получении достоверной информации о временах прихода полезных волн на георадарограмме. Эта задача решается посредством
процедуры корреляции волн. Процесс корреляции волн следует начинать там, где разрез дорожной одежды известен. Знание приближенного времени пробега волны по траектории передатчик – граница - приемник и фазы волны на границе, позволяет выделить временные координаты осей синфазности волн, соответствующих отражениям от основных границ дорожной одежды. Линию, соединяющую одинаковые фазы одной и той же волны на разных реализациях, называют осью синфазности.
- Выделив на георадарограмме фазы волн, соответсвующих основным рефлекторам дорожной одежды, можно приступить к прослеживанию этих фаз на всей зарегистрированной георадарограмме и построению осей синфазности с их последующей векторизацией, т. е. определением её временных и пространственных координат.
- Надежное прослеживание волн можно обеспечить только при достаточно высоком отношении сигнал/помеха, когда амплитуды полезных колебаний превосходят средний уровень волн-помех в 1,5—2 раза. Выполняют фазовую корреляцию волн по их наиболее четким экстремумам.
- Прорисовка осей синфазности на масштабированной георадарограмме осуществляется с помощью редакторов построения линии. В процессе построения осуществляется также автоматическая векторизация линии.
- Проведение осей синфазности (пикирование) в современных обрабатывающих системах могут выполняться в ручном или интерактивном режимах. Ручной режим сводится к прорисовке кусочно-гладкой линии, соединяющей координаты экстремумов прослеживаемой волны.
При интерактивном отслеживании (пикировании) экстремумов пользователь задает начальную и конечную точки на интервале оси синфазности. Между этими точками прослеживание оси синфазности для каждой трассы происходит в автоматическом режиме. Пикирование выполняется последовательно для каждой границы. Результатом этой процедуры является георадарограмма на которой прорисованы кусочно-гладкими линиями основные оси синфазности полезных волн.
 |
|
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
 |
б) в)
г)
а) временной разрез с указанием осей синфазности основных рефлекторов дорожной одежды; б) глубинный разрез; в) энергограмма; г) комплексная электрофизическая модель дорожной одежды и земляного полотна.
Рисунок 4 - Результаты интерпретации георадарограммы
б) Преобразование временного разреза в глубинный.
- Для преобразования временного разреза в глубинный необходимо знать скорости распространения электромагнитных волн по слоям на частоте зондирования. Используют три способа определения скоростей электромагнитных волн в разрезе дорожной одежды.
Первый способ основан на сопоставлении данных бурения и результатов георадиолокационной съемки. Этот способ является наиболее точным и достоверным.
Второй условно называется способом гипербол, и применим, когда на георадарограмме отчетливо проявляются волновые эффекты в виде гипербол. Этот способ, в отличие от первого, дает лишь приблизительные представления о скоростной характеристике разреза.
Третий способ оценки скоростей может быть реализован по данным многоканальных измерений или одноканальных радаров, работающих с изменяемым расстоянием между передающей и приемной антеннами (построение годографа задержки сигнала). Этот способ пока не нашел широкого применения в России.
Определение скоростей по слоям этими методами следует осуществлять с учетом расстояния между приемной и передающей антеннами (базы антенны). Кинематическую поправку необходимо вводить при изучении глубин меньших базы антенны.
Способ определения скоростей распространения электромагнитных колебаний по данным бурения. Этот способ называют калибровкой георадарограмм, а скважины, используемые для расчета скоростей, называют калибровочными или параметрическими. Для определения скоростей по слоям (послойная скорость) используют временной разрез, полученный после введения кинематической поправки. По временному разрезу определяют время пробега электромагнитной волны в слое. Это время вычисляется как половина разности времен, соответсвующих осям синфазности отраженных волн от кровли и подошвы слоя в области расположения скважины. При этом скорость распространения электромагнитных волн в слое определяется как отношение толщины слоя к времени пробега электромагнитной волны в слое.
Способ определения скорости прохождения волн по гиперболам. Когда скважины отсутствуют, можно только приблизительно оценить скорости распространения ЭМ волн, анализируя параметры квазигипербол (гиперболических линий), формирующихся на георадарограмме в результате дифракции электромагнитных волн на локальных объектах. Ось синфазности дифрагированной волны формирует гиперболическую линию. Вершина этой линии определяет положение объекта, а крутизна ветвей квазигиперболы – эффективную скорость электромагнитных волн. Для определения скорости необходимо подобрать теоретическую гиперболу, которая наилучшим образом совпадает с гиперболической линией. Полученное значение эффективной скорости может быть пересчитано в значение скорости в слое при известной мощности и скорости электромагнитных волн в вышележащих слоях.
Пересчет временного разреза в глубинный осуществляется с помощью редактора скоростей или электронной таблицы. Значения скоростей распространения электромагнитных волн может меняться вдоль линии профиля, например, если изменяется влажность материала слоев. Это может приводить к ошибкам в определении толщин конструктивных слоев дорожной одежды.
Глубинный разрез отражает только геометрию границ слоев. Для получения информации об изменчивости состава необходимо проанализировать динамические характеристики волнового поля. Этот анализ выполняется в рамках динамической интерпретации.
4.2.3 Динамическая интерпретация основана на количественном анализе интенсивности и формы полезных волн наряду с временами их прихода. Построение динамического георадиолокационного разреза позволяет на качественном уровне оценить изменения гранулометрического состава, плотности и влажности материалов дорожной одежды и грунтов земляного полотна. Объектом динамической интерпретации, являются георадарограммы прошедшие стадию предварительной обработки, поскольку применение частотных фильтров приводит к подавлению нерегулярных составляющих волнового поля, в то время как нерегулярные возмущения несут информацию о неоднородностях грунтов и материалов дорожной одежды. Результат динамической интерпретации представляется в виде радарограмм, отражающих изменения волнового электромагнитного поля, связанные с изменением гранулометрического состава, плотности и влажности материалов.
Динамическая интерпретация базируется на выполнении трех этапов обработки:
выявление пространственно-временных возмущений волнового поля;
восстановление точек дифракции, соответствующих локальным объектам;
определение частотных и энергетических характеристик возмущений электромагнитных нерегулярных полезных волн.
а) Выявление пространственно-временных возмущений волнового поля.
Для решения этой задачи используют пространственные фильтры высоких частот. Этот вид фильтрации позволяет убрать на георадарограмме протяженные оси синфазности, связанные с отражениями от границ слоев дорожной одежды. На отфильтрованной георадарограмме отчетливо проявляются области возмущений ЭМ волн, связанные со сменой амплитуд, частотного состава и фазой нерегулярных полезных волн. Эти возмущения, как правило, связаны с локальными объектами и неоднородностями грунтов. После выполнения процедуры пространственной фильтрации волновые эффекты, отражающие локальные объекты, следует подвергнуть процедуре, позволяющей восстановить точки дифракции, характеризующие форму объекта.
б) Восстановление точек дифракции, соответствующих локальным объектам.
Под локальными объектами следует понимать неоднородности, глубина расположения которых превышает их размеры, а электрофизические свойства резко отличаются от свойств вмещающей их среды. Обычно такими объектами являются инженерные коммуникации, водопропускные трубы, крупные камни, бетонные блоки и др. Неоднородностям этого типа на георадарограммах соответствуют квазигиперболы. Восстановление точек дифракции, расположенных в вершинах гиперболических линий, выполняется с помощью процедуры миграции - гиперболического суммирования (синтеза апертуры, FK - миграции). В результате обработки выделяются сигналы от локальных объектов. При выполнении гиперболического суммирования скорость распространения электромагнитных волн считается постоянной, а её значение задается пользователем. Эта величина соответствует эффективной скорости, определенной по квазигиперболам на георадарограмме. Если скорости определены неточно или изменяются вдоль профиля, то процедура гиперболического суммирования становиться неэффективной. Правильно выполненное миграционное преобразование позволяет повысить разрешение георадарограммы по горизонтали восстановить истинную форму отражающих (дифрагирующих) объектов и очистить запись волнового поля от волн-помех, порождаемых при отражении от неплоских границ и тел конечных размеров.
в) Определение частотных и энергетических характеристик возмущений электромагнитных нерегулярных полезных волн.
В состав обрабатывающих систем должны входить процедуры определения ряда энергетических и частотных характеристик георадарограммы. Для этого используется так называемое преобразование Гильберта, позволяющее получать новые образы временных изображений, путем использования функций мгновенных амплитуды, фазы и частоты аналитического сигнала. При выполнении преобразования Гильберта строится аналитическая функция (комплексный сигнал), действительная часть которого есть реализация, а мнимая – её Гильберт-трансформанта. Мгновенные значения частоты и фазы позволяют выявлять участки записи с различным частотным составом и фазовыми сдвигами. Это могут быть участки записи, соответствующие отражениям от областей конструкции с другой структурой или влажностью материала. Модуль амплитуды Гильберт-трансформанты называется “мгновенной амплитудой”, и является огибающей исходного сигнала. Это преобразование позволяет выделить на георадарограмме участки с различным характером электромагнитного волнового поля, отличающиеся более высокой или более низкой энергией сигнала и не имеющие четких границ. Такие интервалы георадарограммы связаны, как правило, с областями исследуемой среды, характеризующимися неоднородным составом или повышенной влажностью. Изменение энергии волнового поля связано также с изменением глинистости грунтов. Интервалам среды, где преобладают песчаные грунты, свойственны повышенные значения энергии нерегулярных полезных волн. При повышении глинистости грунтов энергия этих волн убывает.
Полученная энергограмма трансформируется в глубинный разрез с помощью редактора скоростей. Трансформация осуществляется так же, как и в случае кинематической модели. Полученная энергограмма называется динамической моделью волнового поля. Динамическая форма изображения исследуемых конструкций имеет большие преимущества, так как сохраняет информацию о структуре волнового ЭМ поля.
4.3 Методика послойной обработки радарограмм
4.3.1 Послойная обработка радарограмм выполняется по вертикальным сечениям, характерным для выделенной интерпретатором однородной части конструкции. Программа обработки радиолокационных данных должна позволять корректировать толщины слоев в этих сечениях путем введения диэлектрической проницаемости (e) материалов для каждого слоя. В противном случае, при одинаковом значении e для всего полупространства, результаты обработки радарограмм могут давать значительную погрешность определения толщины слоев – более 10 %.
4.3.2 Обработанная радарограмма проходит послойную корректировку по результатам контрольного бурения. На радарограмме «подтягиваются» границы слоев до глубин, полученных по результатам бурения. При известной толщине слоев дорожной одежды и грунтов программа обработки позволяет по радарограмме уточнить послойную диэлектрическую проницаемость материалов и грунтов в месте заложения буровой скважины. Далее корректировка может выполняться в следующей последовательности:
а) На радарограмме выделяется нижняя граница верхнего слоя конструкции, вводится истинная диэлектрическая проницаемость материала верхнего слоя и с помощью программы происходит либо увеличение, либо уменьшение толщины выбранного слоя в зависимости от отношения истинной диэлектрической проницаемости к той, при которой были проведены измерения.
б) Производится переход ко второму слою, у которого также выделяется нижняя граница, вводится истинная диэлектрическая проницаемость материала второго слоя и с помощью программы происходит либо увеличение, либо уменьшение толщины второго слоя. В такой последовательности производится корректировка всех слоев дорожной одежды и грунтов земляного полотна.
4.4 Материалы, представляемые заказчику
4.4.1 После выполнения интерпретации радарограмм, материалы обследования сдаются заказчику. При этом они могут быть представлены в зависимости от требований заказчика в следующем виде:
а) в виде геологического разреза с выделением подошвы и кровли слоев, выявленных дефектов (пустоты, разуплотненные или переувлажненные грунты, пути фильтрации грунтовых вод и т. д.), указанием длины разреза, глубины расположения слоев, отмеченных меток в процессе сканирования, времени или скорости прохождения сигнала с георадарной подложкой, по которой были определены границы слоев;
б) то же, без георадарной подложки.
4.4.2 Отчетные материалы рекомендуется представлять в следующих масштабах:
а) на продольных разрезах:
горизонтальный масштаб 1:2000 (1:1000);
вертикальный (грунтовый) 1:50 (1:100);
б) на поперечных разрезах:
горизонтальный масштаб 1: 100 (1: 200);
вертикальный (грунтовый) 1:50 (1: 100).
4.4.3. Локальные участки, требующие детального геологического анализа, могут быть приведены в произвольных масштабах, которые наиболее четко отражают выявленные дефекты.
5 Рекомендуемый состав отряда по обследованию автомобильных дорог георадарными методами
5.1 Рекомендуемый состав отряда:
- инженер-дорожник – 1 чел
- инженер-геофизик – 1 чел
- инженер-геолог – 1 чел
- водитель (только при буксировке георадара автомобилем или вездеходом) – 1 чел
- рабочий (только при необходимости выполнения контрольного бурения или шурфования) – 1 чел.
5.2 Обязанности членов отряда:
5.2.1 Инженер-дорожник – руководит работой по обследованию дорог георадарными методами, проводит совместно с инженером геологом рекогносцировочный осмотр, выбирает маршрут. Назначает последовательность выполнения работ и, при необходимости, изменяет ее, распределяет обязанности, обеспечивает безопасные методы проведения работ, определяет и регистрирует метки, вносимые в компьютер, осматривает искусственные сооружения и фиксирует информацию о них, утверждает по предложению инженера-геолога места последующего контрольного бурения или шурфования. После выполнения полевых работ принимает у инженера-геолога и инженера-геофизика обработанные и интерпретированные радарограммы, у инженера-геолога – результаты лабораторных исследований по отобранным пробам материалов и грунтов. Готовит отчет и заключение по результатам георадарных обследований.
5.2.2 Инженер-геофизик (оператор) – планирует необходимую методику выполнения работ, проводит техническое обслуживание аппаратуры, собирает георадар в рабочее состояние, устанавливает начальные параметры измерений, постоянно следит за работой георадара и ходом регистрации радарограммы, изменяет начальные параметры в процессе выполнения работ в зависимости от результатов записи, следит за электропитанием георадара, разбирает георадар после завершения работ. После выполнения полевых работ, в камеральных условиях, совместно с инженером-геологом проводит обработку и интерпретацию радарограмм.
5.2.3 Инженер-геолог – участвует в рекогносцировочном осмотре, буксирует георадар при ручной транспортировке, отмечает по косвенным признакам изменение грунтово-гидрогеологических условий, определяет места последующего контрольного бурения, руководит работой по шурфованию или контрольному бурению, отвечает за безопасные методы проведения буровых работ или шурфования, отбирает пробы материалов и грунта для последующего лабораторного анализа, в процессе бурения фиксирует глубины заложения материалов и грунтов, а также информацию о взятых пробах (вид материалов, тип и консистенцию грунта). После выполнения полевых работ, в камеральных условиях совместно с инженером-геофизиком, участвует в обработке и интерпретации радарограмм. В лабораторных условиях определяет гранулометрический состав и физико-механические свойства отобранных материалов и грунтов.
5.2.4 Водитель – доставляет отряд и оборудование до места проведения работ, участвует в работах только при буксировке георадара транспортным средством, готовит транспортное средство для проведения обследования, обеспечивает заданный маршрут и постоянную скорость буксировки георадара транспортным средством, вывозит отряд и оборудование на место дислокации после завершения работ.
5.2.5 Рабочий – обеспечивает погрузку и разгрузку оборудования и инструментов, по указанию инженера-дорожника расставляет знаки для обеспечения безопасности выполнения работ, выкапывает шурфы и выполняет контрольное бурение в местах и на глубину указанную инженером-геологом.
6 Рекомендации по калибровке георадара
6.1 Принцип калибровки заключается в определении толщины слоев дорожной конструкции двумя методами - бурением и георадаром с последующим их сравнением.
6.2 Сначала определяют толщину слоев конструкции по одной скважине, затем, с помощью программы обработки данных, по известной толщине каждого слоя определяют диэлектрическую проницаемость материалов дорожной конструкции. После этого производят сканирование среды георадаром на участке длиной 100 – 200 м и обработку результатов.
6.3 По оси движения антенн георадара рекомендуется заложить не менее 5 скважин. По каждой скважине следует определить истинную толщину соответствующего слоя конструкции, сравнить ее с показаниями георадара и рассчитать точность измерений в соответствии с п. п. 6.4 – 6.8.
6.4 Пусть xi, i=1,…,n, - разность толщин слоя по результатам бурения и полученная с помощью георадара по i-той скважине. Число испытаний n, ![]() . Поскольку речь идет об измерениях толщин, полученных одним и тем же способом, то предполагается, что набор {xi} представляет собой выборку значений из генеральной совокупности X, распределенной по нормальному закону.
. Поскольку речь идет об измерениях толщин, полученных одним и тем же способом, то предполагается, что набор {xi} представляет собой выборку значений из генеральной совокупности X, распределенной по нормальному закону.
6.5 В качестве точечной оценки математического ожидания возьмем выборочное среднее:
 . (1)
. (1)
Эта оценка является несмещенной, т. е. ее математическое ожидание равно оцениваемому параметру, состоятельной, т. е. подчиняется закону больших чисел (при увеличении числа испытаний стремится по вероятности к оцениваемому параметру), и, наконец, эффективной, т. е. имеет наименьшую дисперсию.
6.6 В качестве точечной оценки дисперсии следует определять исправленную выборочную дисперсию:
 . (2)
. (2)
Эта оценка является несмещенной и состоятельной.
6.7 Расчет статистических показателей определения толщины слоя на примере покрытия:
а) Задается допустимая погрешность определения толщины покрытия, например, 0.01 м.
б) Задается погрешность «эталонного» метода измерений (по результатам бурения), например, 0.005 м. Для оценки погрешности испытуемого георадара достаточно убедиться, что  , т. е., что длину доверительного интервала для математического ожидания M случайной величины X можно взять 0.005.
, т. е., что длину доверительного интервала для математического ожидания M случайной величины X можно взять 0.005.
в) Определяют доверительные интервалы для оценки математического ожидания по выборочным средним и выборочным дисперсиям. Так как число испытаний невелико, интервалы допускается строить, используя распределение Стъюдента:
Значение t берется из таблиц распределения Стъюдента, фрагмент которой приведен в таблице 1, величина ![]() определяется по формуле (2).
определяется по формуле (2).
г) При числе испытаний n=5, задавшись надежностью 0.95 (доверительной вероятностью 0.95, т. е. вероятностью того, что средние значения, полученные по скважине и испытуемому георадару отличаются не более, чем на 0.005), из таблицы 3 находят t=2.78.
д) если условие ![]() т. е.
т. е. ![]() не выполняется, то испытуемый прибор подлежит дополнительной настройке.
не выполняется, то испытуемый прибор подлежит дополнительной настройке.
Таблица 3 - Коэффициенты Стъюдента для надежности 0.95.
|
Число испытаний |
5 |
6 |
7 |
8 |
9 |
10 |
|
Коэффициент Стъюдента |
2.78 |
2.57 |
2.45 |
2.37 |
2.31 |
2.26 |
е) Точность измерений толщины георадаром характеризуется степенью разброса результатов при измерении одной и той же величины. Поскольку предполагается, что «эталонный» метод значительно точнее испытуемого, то допускается оценивать точность испытуемого прибора с помощью выборочного среднеквадратического отклонения ![]() (формула (1)) величины X, распределенной нормально. Доверительные интервалы для оценки среднеквадратического отклонения нормального распределения строятся с использованием распределения
(формула (1)) величины X, распределенной нормально. Доверительные интервалы для оценки среднеквадратического отклонения нормального распределения строятся с использованием распределения ![]() :
:
![]() .
.
где: ![]() определяется по формуле (2),
определяется по формуле (2),
![]() - половина длины доверительного интервала,
- половина длины доверительного интервала,
![]() - оцениваемое среднеквадратическое отклонение.
- оцениваемое среднеквадратическое отклонение.
ж) При числе испытаний n=5, задавшись надежностью 0.95, из таблицы 4 находят величину ![]() , а затем искомую длину интервала
, а затем искомую длину интервала ![]() . Если условие
. Если условие ![]() не выполняется, т. е. с надежностью 0.95 не обеспечивается 10 %-я точность, то испытуемый прибор подлежит дополнительной настройке.
не выполняется, т. е. с надежностью 0.95 не обеспечивается 10 %-я точность, то испытуемый прибор подлежит дополнительной настройке.
6.8 Подобным образом, в зависимости от требуемой погрешности, определяется точность измерений и надежность результатов при определении толщины других слоев.
Таблица 4 - Коэффициент q, используемый при нахождении доверительных интервалов для оценки среднеквадратического отклонения. Надежность 0,95.
|
Число испытаний |
5 |
6 |
7 |
8 |
9 |
10 |
|
Коэффициент q |
1.37 |
1.09 |
0.92 |
0.8 |
0.71 |
0.65 |
7 Основные правила техники безопасности при работе с георадарами
7.1 В целях обеспечения безопасности движения при буксировке георадара автомобиль должен быть оборудован проблесковым маячком оранжевого цвета.
7.2 Антенны георадара, закрепленные спереди или сзади автомобиля должны быть окрашены в оранжевый цвет с нанесенными красно-белыми полосами в соответствии с ОСТ 218.011-99.
7.3 При работе на двухполосной проезжей части, на автомобиле необходимо установить знак 4.2.2 – объезд препятствия слева, который должен быть хорошо виден водителям движущихся сзади автомобилей. При работе на многополосной проезжей части, во время движения по средним полосам – знаки 4.2.2 и 4.2.1 объезд препятствия слева и справа. В процессе движения по крайней левой полосе одного направления - знак 4.2.1 объезд препятствия справа.
7.4 При буксировке георадара вручную, работающие люди должны быть защищены от наезда попутных автомобилей медленно движущимся на расстоянии 5-8 м от работающих автомобилем с включенным проблесковым маячком и аварийной сигнализацией. При движении по двухполосной дороге, работающие должны быть защищены двумя автомобилями – спереди и сзади. При этом на автомобилях должен быть включен ближний свет фар.
7.5 Проведение работ на дороге с интенсивностью движения более 1500 автомобилей на полосу, необходимо согласовывать с органами госавтоинспекции. В этом случае предпочтительнее работать под прикрытием автомобиля ГИБДД.
7.6 В случае производства работ в условиях интенсивного движения, на небольшом участке дороги (протяженностью до 50 м), место производства работ следует огораживать. При проведения измерений в поперечном направлении движение на время работ следует останавливать(при интенсивности движения более 1500 авт./сут).
7.7 Не рекомендуется направлять на людей излучатель антенны работающего прибора. Георадар должен иметь гигиенический сертификат, подтверждающий его безопасность для окружающих.
8 Основные технико-эксплуатационные показатели при работе с георадарами
Таблица 3 Средняя производительность полевых работ при измерениях в продольном направлении (с учетом подготовительных работ)
|
Георадиолокационное оборудование |
Количество км, за смену | |||
|
1 категория дорог (4 полосы) при состоянии: |
2-4 категория дорог при состоянии: | |||
|
хорошем |
плохом |
хорошем |
Плохом | |
|
Радары с контактными антеннами |
3-4 |
2-3 |
4-5 |
3-4 |
|
Радары с бесконтактными антеннами |
8-10 |
6-8 |
10-12 |
8-10 |
Примечание: Предусматриваются проходы в прямом и обратном направлениях.
Таблица 4 Средняя производительность полевых работ при измерениях в поперечном направлении (с учетом подготовительных работ)
|
Георадиолокационное оборудование |
Количество поперечников за смену, шт. | |||
|
1 категория дорог при загрузке: |
2-5 категория дорог при загрузке: | |||
|
высокой |
низкой |
высокой |
Низкой | |
|
Радары с контактными антеннами |
50 |
70 |
80 |
100 |
|
Радары с бесконтактными антеннами |
50 |
70 |
80 |
100 |
Таблица 5 Производительность работ (км/смену) по обработке и интерпретации радарограмм, снятых в продольном направлении, при различном количестве скважин
|
Среда |
Производительность работ (км/смену) при количестве буровых скважин на 1 км. | ||
|
1 |
3 |
5 | |
|
Однородная |
1,2 |
1,6 |
2,0 |
|
Неоднородная |
0,8 |
1,2 |
1,5 |
Таблица 6 Производительность работ (поперечников в смену) при обработке и интерпретации радарограмм, снятых в поперечном направлении
|
Характеристика |
Количество поперечников при числе буровых скважин на 1 поперечник | ||
|
0,2 |
0,4 |
0,6 | |
|
Количество поперечников |
3-4 |
6-8 |
11-13 |
9 Основные эксплуатационные характеристики георадаров, применяемых в России
Таблица 7 Технические характеристики георадаров «ОКО» (с контактными антеннами).
Скорость движения при измерении – до 20 км/ч
|
Антенный блок |
Параметры георадара | ||
|
Центральная частота, МГц |
Глубина зондирования, м |
Разрешающая способность, м | |
|
АБД |
25-100 |
30 |
0,5-2,0 |
|
АБ-150 |
150 |
12 |
0,35 |
|
АБ-250 |
250 |
8 |
0,25 |
|
АБ-400 |
400 |
5 |
0,17 |
|
АБ-500 |
500 |
4 |
0,12 |
|
АБ-700 |
700 |
3 |
0,1 |
|
АБ-900 |
900 |
2 |
0,07 |
|
АБ-1200 |
1200 |
1 |
0,05 |
Таблица 8 Технические характеристики георадаров «ДРЛ» (рупорные антенны).
Скорость движения при измерении – до 50 км/ч
|
Антенная система |
Глубина зондирования, м |
Размеры, см |
Разреша- ющая способ- ность, м |
Масса, кг |
|
2000 МГц |
до 0,50 |
600 х 400 х 800 |
0,02…0,03 |
6 |
|
1000 МГц |
до 1,5 |
600 х 400 х 800 |
0,04 |
6 |
|
250 МГц |
до 4 |
950 х 1000 х 1000 |
0,25 |
12 |
Таблица 9 Технические характеристики георадаров «Лоза» серии «Грот» (дипольные
антенны). Скорость движения при измерении – до 3 км/ч
|
Характеристики среды |
Глубина зон-дирования, м |
Разрешение по глубине, м |
Разрешение по горизонтали, м |
|
Пресноводный лед |
250 |
0,1 |
0,5 |
|
Известняк |
>60 |
0,1 |
0,5 |
|
Сухой песок |
>50 |
0,1 |
0,5 |
|
Влажный песок |
25 |
0,1 |
0.5 |
|
Глина |
8 |
0,1 |
0,5 |
Таблица 10 Технические характеристики георадара Зонд-12С (контактные антенны)
Скорость движения при измерении – до 20 км/ч
|
Антенная система |
Размеры, см |
Масса, кг |
Глубина зондирования, м |
|
2000 МГц |
27 х 13 х 13 |
1,5 |
0,5 |
|
1000 МГц |
30 х 20 х 17 |
4,0 |
1,2 |
|
900 МГц |
43 х 22 х 4 |
2 |
1,7 |
|
500 МГц |
69 х 32 х 4 |
4 |
3 |
|
300 МГц |
98 х 52 х 4 |
10 |
5 |
|
28-150 |
- |
3-6 |
10 |
Таблица 11 Технические характеристики георадаров Sir systems
Скорость движения при измерении – определяется типом применяемых антенн.
|
Модель |
Глубина зон-дирования, м |
Центральная частота, МГц |
Габариты, см |
Масса, кг |
|
5100 |
до 0,50 |
1500 |
3,8 х 10 х 16,5 |
1,8 |
|
4108 |
до 1 |
1000 |
60 х 22 х 19 |
5,0 |
|
3101D |
до 1 |
900 |
8 х 18 х 33 |
2,3 |
|
5103 |
до 3 |
400 |
30 х 30 х 20 |
4,6 |
|
5106 |
до 9 |
200 |
60 х 60 х 30 |
20 |
|
3207АР |
до 15 |
100 |
25 х 96 х 200 |
28 |
|
Suberho-70 |
до 25 |
70 |
120 х 15 х 26 |
4 |
|
Suberho-40 |
до 35 |
40 |
200 х 15 х 26 |
5 |
|
3200MLF |
до 40 |
16,20,35,40,80 |
120-600 |
17-25 |
Список литературы
ОДН 218.0. «Правила диагностики и оценки состояния автомобильных дорог», ГСДХ Минтранса РФ, М. 2002.
ОДН 218.1. «Оценка прочности нежестких дорожных одежд», ГСДХ Минтранса РФ, М. 2003.
Технические указания по применению георадиолокационного метода для диагностики земляного полотна, МПС РФ, М. 1997 г.
