


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
И. Н. МОЗГОВОЙ
Научный руководитель – А. А. КИСУРИН, к. т.н., доцент
Воронежский государственный технический университет
РАЗРАБОТКА МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ
ДЛЯ УПРАВЛЕНИЯ ШНЕКОВЫМ ДОЗАТОРОМ
В статье рассмотрена возможность построения микропроцессорной системы шнекового дозатора на основе современных технологий, которые позволяют существенно упростить и ускорить процесс дозирования.
Целью данной работы является проектирование микропроцессорной системы для управления шнековым дозатором.
Существующая система представляет собой обычный мультивибратор с управляемой скважностью импульсов.
Недостатки такой системы: ненаглядность; неудобство; нет возможности построения единого комплекса; нет возможности установки датчика верхнего и нижнего уровня в бункере сырья.
Кроме того, из–за большого количества взвешиваний, может возникнуть простой в работе.
Для устранения существующих недостатков возникла необходимость создания новой системы для управления дозатором.
В разрабатываемой системе блок управления представляет собой законченное устройство и взаимодействует с оператором посредством консоли управления, состоящей из трех клавиш и светодиодного семисегментного индикатора.
На индикаторе в левых трех разрядах обозначается текущий параметр, а в правых пяти его значение. В режиме установки, точка указывает текущий разряд.
Клавиатура содержит клавишу пуска\останова\калибровки, а также две клавиши, предназначенные для выбора и изменения текущих параметров.
Для начала использования устройства, а также при смене сырья необходимо произвести калибровку. Для этого необходимо к выходу дозатора подключить мерную тару; нажать и удерживать клавишу ПУСК более 3сек. При этом на дисплее высветится надпись Cal------. Через две минуты БУ автоматически перейдет в режим ввода параметра калибровки. После задания калибровочного значения устройство готово к работе.
Для запуска устройства необходимо нажать клавишу ПУСК, если устройство остановлено.
Изменение параметров системы происходит следующим образом: с помощью клавиши выбирается необходимый параметр; при нажатии клавиши активизируется первый разряд (индицируется запятой в активном разряде); с помощью клавиши устанавливается новое значение; нажимаем клавишу активизируя следующий разряд; повторяя пункты 3 –4 устанавливаем новое значение; после ввода последнего разряда и нажав клавишу, выходим в режим выбора параметров.
На рисунке 1 представлена схема микропроцессора для управления шнековым дозатором.
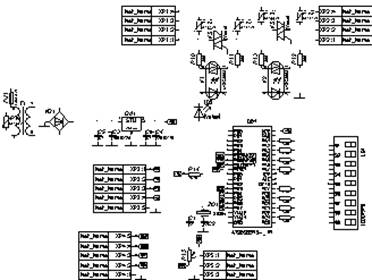 |
Рис. 1. Схема микропроцессора шнекового дозатора
В результате проделанной работы была разработана микропроцессорная система для управления шнековым дозатором, лишенная недостатков аналогичных уже существующих систем.
