

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Лекция № 1
ВВЕДЕНИЕ
1.1. Допущения сопротивления материалов
Сопротивление материалов – это наука о прочности, жесткости и устойчивости. Прочность – это способность материала выдерживать заданные нагрузки, не разрушаясь. Жесткость – это способность конструкции сопротивляться деформированию при действии заданных нагрузок. Устойчивость – это способность конструкции сохранять свою форму при действии заданных нагрузок.
Основные допущения, используемые в сопротивлении материалов :
1. В отличие от теоретической механики, материал считается не абсолютно твердым, а деформируемым.
2. В большинстве задач материал считается абсолютно упругим, то есть принимает первоначальную форму после снятия нагрузки.
3. Материал считается сплошным, то есть не учитывается то, что он состоит из атомов, кристаллов и считается, что материал полностью заполняет весь объем конструкции.
4. Материал считается однородным, то есть весь объем материала обладает одинаковыми механическими свойствами.
5. Материал считается изотропным, то есть имеет одинаковые механические свойства во всех направлениях. Материалы, не обладающие этим свойством, называются анизотропными.
6. Абсолютные деформации элементов конструкции считаются малыми по сравнению с размерами этих элементов.
7. 
 Выполняется принцип суперпозиции или независимости действия сил, то есть, если на конструкцию действуют несколько сил, то усилия, напряжения и перемещения, возникающие в этой конструкции от действия этих сил, будут равны сумме усилий, напряжений и перемещений от действия каждой силы отдельно.
Выполняется принцип суперпозиции или независимости действия сил, то есть, если на конструкцию действуют несколько сил, то усилия, напряжения и перемещения, возникающие в этой конструкции от действия этих сил, будут равны сумме усилий, напряжений и перемещений от действия каждой силы отдельно.
На рис. 1.1 показан пример применения принципа суперпозиции, а на рис. 1.2 приведен пример, в котором этот принцип не работает.
 8. Принцип Сен-Венана. Если на небольшую, по сравнению с размерами конструкции область, действует заданная система сил, то ее можно заменить равнодействующими: силой и моментом, отбросив при рассмотрении конструкции эту малую область
8. Принцип Сен-Венана. Если на небольшую, по сравнению с размерами конструкции область, действует заданная система сил, то ее можно заменить равнодействующими: силой и моментом, отбросив при рассмотрении конструкции эту малую область ![]() , рис. 1.3.
, рис. 1.3.
1.2. Схематизация конструкций и нагрузок
Реальный объект – это та конструкция, которую необходимо рассчитать. Расчетная схема – это реальный объект, освобожденный от несущественных подробностей. На рис.1.4,а. представлен реальный объект - подъемный кран, а на рис.1.4,б. и рис.1.4,в.- расчетные схема троса и стрелы крана.
 В сопротивлении материалов рассматриваются следующие расчетные схемы:
В сопротивлении материалов рассматриваются следующие расчетные схемы:
Стержень (брус, вал, балка) – это элемент конструкции, у которого один размер – длина, намного больше двух
других размеров поперечного сечения.
Оболочка – это элемент конструкции, у которого один размер, толщина, намного меньше двух других размеров. Пластинка – это оболочка с плоской срединной поверхностью.
Рис. 1.5
К расчетной схеме прикладывают нагрузки :
1. Внешние – силы взаимодействия элементов конструкции с окружающими ее телами и внутренние – силы взаимодействия между соседними частицами тела ( молекулами, кристаллами ).
2. Сосредоточенные : сила ( рис.1.5,а ), момент ( рис.1.5,б ) и распределенные по длине ( рис.1.5,в ), по площади и по объему.
3. Статические и динамические в зависимости от скорости их изменения во времени.
4. Постоянные и временные в зависимости от времени их действия.
1.3. Метод сечений, внутренние силы
 Рассмотрим некоторое тело, на которое действуют заданные нагрузки. В каждом месте тела на него действуют свои нагрузки, для их определения используют метод сечений. Мысленно рассекаем тело на две части какой-либо поверхностью, чаще всего используем плоскость ( рис.1.6,а). Затем мысленно одну из частей отбрасываем, и рассматриваем равновесие оставшейся части ( рис.1.6,б ).
Рассмотрим некоторое тело, на которое действуют заданные нагрузки. В каждом месте тела на него действуют свои нагрузки, для их определения используют метод сечений. Мысленно рассекаем тело на две части какой-либо поверхностью, чаще всего используем плоскость ( рис.1.6,а). Затем мысленно одну из частей отбрасываем, и рассматриваем равновесие оставшейся части ( рис.1.6,б ).
 Между I и II частями тела существуют внутренние силы взаимодействия, произвольно направленные. Приведем эти силы взаимодействия к центру тяжести сечения, получим главный вектор
Между I и II частями тела существуют внутренние силы взаимодействия, произвольно направленные. Приведем эти силы взаимодействия к центру тяжести сечения, получим главный вектор ![]() и главный момент
и главный момент ![]() ( рис.1.6,б ).
( рис.1.6,б ).
Разложим главный вектор и главный момент по осям координат ( рис.1.7).
Проекции главного вектора:
![]() - продольная сила,
- продольная сила,
![]() - поперечные силы.
- поперечные силы.
Проекции главного момента:
![]() - крутящий момент,
- крутящий момент,
![]() - изгибающие моменты.
- изгибающие моменты.
Для того, чтобы найти все эти шесть внутренних сил, необходимо составить шесть уравнений равновесия статики пространственной системы сил.
![]() , откуда находим
, откуда находим ![]() .
. ![]() , откуда находим
, откуда находим ![]() .
.
![]() , откуда находим
, откуда находим ![]() .
. ![]() , откуда находим
, откуда находим ![]() .
.
![]() , откуда находим
, откуда находим ![]() .
. ![]() , откуда находим
, откуда находим ![]() .
.
Только после того, как мы нашли из уравнений равновесия все силы, можем знать, какие виды нагружения испытывает тело: растяжение, изгиб или что-либо другое.
 Напряжения. Выделим в сечении малый участок площадью
Напряжения. Выделим в сечении малый участок площадью ![]() . Приведем все силы, действующие на участке
. Приведем все силы, действующие на участке ![]() , к центру тяжести этого участка ( рис.1.8,а ). Получим главный вектор этих сил
, к центру тяжести этого участка ( рис.1.8,а ). Получим главный вектор этих сил ![]() . Главный момент будет отсутствовать вследствие малости плечей сил при их приведении к центру тяжести. Тогда
. Главный момент будет отсутствовать вследствие малости плечей сил при их приведении к центру тяжести. Тогда ![]() - среднее напряжение на площадке
- среднее напряжение на площадке![]() . Напряжение измеряется в
. Напряжение измеряется в ![]() . Стянем площадку
. Стянем площадку ![]() в точку и получим напряжение в точке
в точку и получим напряжение в точке  .
.
Разложим напряжение в точке ![]() на
на
Рис. 1.8 две составляющие: перпендикулярную к
площадке ![]() - нормальное напряжение и лежащую в плоскости площадки
- нормальное напряжение и лежащую в плоскости площадки ![]() - касательное напряжение ( рис.1.8,б ).
- касательное напряжение ( рис.1.8,б ).
Перемещения. При действии нагрузок на конструкцию она меняет свою форму, и каждая точка конструкции перемещается. Перемещения бывают линейными (обозначаются ![]() ) и угловыми (
) и угловыми (![]() ). Проекции линейного перемещения на координатные оси
). Проекции линейного перемещения на координатные оси  обозначаются u, v, w.
обозначаются u, v, w.
Деформации. Абсолютные деформации - это изменения первоначальных размеров в теле при нагружении. Относительная линейная деформация ![]() - это изменение при действии нагрузки длины единичного отрезка, выделенного в теле. Ее проекции на оси обозначаются
- это изменение при действии нагрузки длины единичного отрезка, выделенного в теле. Ее проекции на оси обозначаются ![]() . Относительная угловая деформация
. Относительная угловая деформация ![]() - это изменение при действии нагрузки прямого угла, выделенного двумя отрезками в теле. Проекции угловой деформации на координатные плоскости обозначаются
- это изменение при действии нагрузки прямого угла, выделенного двумя отрезками в теле. Проекции угловой деформации на координатные плоскости обозначаются  .
.
Лекция № 2
ЦЕНТРАЛЬНОЕ РАСТЯЖЕНИЕ - СЖАТИЕ
2.1. Закон Гука. Закон Пуассона
Если из всех внутренних сил, только продольные силы N не равны нулю, а остальные внутренние силы отсутствуют, то стержень испытывает центральное растяжение (сжатие). Экспериментально показано, что с учетом принципа Сен-Венана напряжения в сечении стержня при центральном растяжении (сжатии) распределяются равномерно
![]()
Здесь А – площадь поперечного сечения стержня. Экспериментально показано, что удлинение стержня ( рис. 2.1,а ) прямо пропорционально его длине и действующей нагрузке и обратно пропорционально площади поперечного сечения и зависит от материала. ![]() . Для определения силы N используют
. Для определения силы N используют
а б метод сечений ( рис. 2.1,б )
Рис. 2.1 SFZ = 0, N - F = 0, N = F
Тогда ![]()
Эта формула называется законом Гука для абсолютных удлинений. E – постоянная величина, характеризующая данный материал. Она называется модулем Юнга или модулем продольной упругости, или модулем упругости первого рода, измеряется в Па ( МПа = 106 Па ) . Для сталей Е = (1,8 ÷ 2,1) * 105 МПа. Е * А – жесткость тела при растяжении (сжатии), чем она больше, тем меньше перемещение. Относительное удлинение деформированного стержня или продольная деформация
 . Разделим обе части ( 2.2 ) на
. Разделим обе части ( 2.2 ) на ![]() , получим
, получим ![]() .
.
Откуда выражение закона Гука для материала запишется
 или
или ![]() ( 2.3 )
( 2.3 )
Поперечное сечение стержня при растяжении сужается и его размеры уменьшаются. Величина Dа = а1 – а0 называется абсолютным сужением.
 - поперечная деформация или относительное сужение.
- поперечная деформация или относительное сужение.
Пуассон установил, что для изотропных материалов отношение поперечной деформации к продольной для каждого материала, есть величина постоянная, называемая коэффициентом Пуассона μ. Закон Пуассона записывается в виде
 или
или ![]() (2.4)
(2.4)
Минус в формуле стоит потому, что поперечная и продольная деформации разных знаков, а ![]() .
.
2.2. Определение механических характеристик материалов испытаниями на растяжение.
В сопротивлении материалов некоторые величины можно найти только экспериментальным путем. Неразрушающие методы испытаний чаще всего применяют для конструкций, а разрушающие - для материалов.
 Рассмотрим испытание на растяжение. Специально изготовленный образец из исследуемого материала крепится к захватам испытательной машины и растягивается. При испытаниях на растяжение происходит автоматическая запись диаграммы растяжения, связывающая удлинение образца
Рассмотрим испытание на растяжение. Специально изготовленный образец из исследуемого материала крепится к захватам испытательной машины и растягивается. При испытаниях на растяжение происходит автоматическая запись диаграммы растяжения, связывающая удлинение образца ![]() и растягивающую силу
и растягивающую силу![]() . Это диаграмма растяжения конкретного образца. Для получения диаграммы растяжения материала, из которого сделан образец, все абсциссы
. Это диаграмма растяжения конкретного образца. Для получения диаграммы растяжения материала, из которого сделан образец, все абсциссы ![]() делим на первоначальную длину
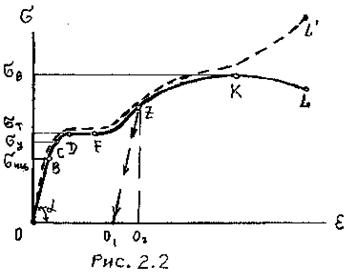
делим на первоначальную длину ![]() , а все ординаты N делим на первоначальную площадь сечения образца А. Получаем диаграмму ( рис. 2.2 ) в координатах
, а все ординаты N делим на первоначальную площадь сечения образца А. Получаем диаграмму ( рис. 2.2 ) в координатах
 и
и  .
.
Вид кривой не меняется, меняется только масштаб. Опишем характерные участки и точки диаграммы. Участок ОВ – прямая линия, деформации и напряжения прямо пропорциональны, то
есть на участке ОВ выполняется закон Гука  . Точке В диаграммы соответствует последнее (предельное) напряжение, при котором сохраняется прямая пропорциональность между напряжением и деформацией.
. Точке В диаграммы соответствует последнее (предельное) напряжение, при котором сохраняется прямая пропорциональность между напряжением и деформацией.
Напряжение, соответствующее этой точке, называется пределом пропорциональности ![]() .От точки В до точки С пропорциональность не выполняется, но материал остается упругим, то есть после снятия нагрузки диаграмма вернется в точку О.
.От точки В до точки С пропорциональность не выполняется, но материал остается упругим, то есть после снятия нагрузки диаграмма вернется в точку О.
В точке С упругость кончается и напряжение, соответствующее точке С, называется пределом упругости ![]() . Участок DF – горизонтальная прямая. Она называется площадкой текучести. От D до F материал “течет”, то есть деформируется без увеличения нагрузки. Если образец полированный, то на его поверхности можно увидеть линии Чернова – Людерса, расположенные под углом 450. Напряжение, соответствующее этой площадке, называется пределом текучести
. Участок DF – горизонтальная прямая. Она называется площадкой текучести. От D до F материал “течет”, то есть деформируется без увеличения нагрузки. Если образец полированный, то на его поверхности можно увидеть линии Чернова – Людерса, расположенные под углом 450. Напряжение, соответствующее этой площадке, называется пределом текучести ![]() . Далее FK – участок упрочнения. До точки К образец растягивался по длине и сужался по площади равномерно. Около точки К на образце появляется местное сужение, называемое шейкой, и в точке L образец разрушается. Напряжение, соответствующее точке К, называется временным сопротивлением
. Далее FK – участок упрочнения. До точки К образец растягивался по длине и сужался по площади равномерно. Около точки К на образце появляется местное сужение, называемое шейкой, и в точке L образец разрушается. Напряжение, соответствующее точке К, называется временным сопротивлением ![]() ( или пределом прочности
( или пределом прочности ![]() , что точно для материалов, разрушающихся без образования шейки ).
, что точно для материалов, разрушающихся без образования шейки ).
Если образец нагрузить до точки Z, а потом снять нагрузку, то диаграмма разгрузки представляет собой прямую линию параллельную ОВ. Полная деформация в точке Z равна ОО2=ε. Она состоит из упругой деформации О1О2 = ![]() и остаточной (пластической) деформации ОО1 =
и остаточной (пластической) деформации ОО1 = ![]() . Если разгруженный образец нагрузить снова, то его диаграмма растяжения опишется линией O1 Z K L. При этом увеличивается упругая зона, это явление называется наклепом и применяется в промышленности для тех изделий, у которых по характеру работы желательно, чтобы пластическая деформация была минимальна.
. Если разгруженный образец нагрузить снова, то его диаграмма растяжения опишется линией O1 Z K L. При этом увеличивается упругая зона, это явление называется наклепом и применяется в промышленности для тех изделий, у которых по характеру работы желательно, чтобы пластическая деформация была минимальна.
Величины  – называют механическими характеристиками материала. При механических испытаниях материалов, получаются их механические характеристики. Технологическими пробами – называются испытания, дающие не объективные, а сравнительные характеристики материалов при строго регламентированных условиях.
– называют механическими характеристиками материала. При механических испытаниях материалов, получаются их механические характеристики. Технологическими пробами – называются испытания, дающие не объективные, а сравнительные характеристики материалов при строго регламентированных условиях.
При переходе от диаграммы с координатами  , к диаграмме в координатах
, к диаграмме в координатах ![]() , делим
, делим ![]() на первоначальную длину образца, а N делим на первоначальную площадь. Но в каждой момент времени при растяжении длина образца увеличивается, а площадь уменьшается. Если
на первоначальную длину образца, а N делим на первоначальную площадь. Но в каждой момент времени при растяжении длина образца увеличивается, а площадь уменьшается. Если ![]() делить на текущую длину образца, а N на текущую площадь, то получится истинная диаграмма растяжения, изображенная на рисунке штриховой линией. При сжатии диаграмма имеет точно такую же форму и характеристики, только пластичный материал будет сплющиваться, и постепенно его площадь увеличится так, что испытательные машины не смогут сжимать его дальше.
делить на текущую длину образца, а N на текущую площадь, то получится истинная диаграмма растяжения, изображенная на рисунке штриховой линией. При сжатии диаграмма имеет точно такую же форму и характеристики, только пластичный материал будет сплющиваться, и постепенно его площадь увеличится так, что испытательные машины не смогут сжимать его дальше.
Если в диаграмме растяжения или сжатия присутствуют площадки текучести, явно или не совсем явно выраженные, то такой материал называется пластичным. Материал, у которого площадки текучести нет, называется хрупким.
2.3. Предельные состояния. Коэффициент запаса
При работе конструкции из пластичных материалов чаще всего необходимо, чтобы максимальные напряжения в конструкции были меньше предела текучести ![]() , а у хрупких материалов максимальные напряжения должны быть меньше временного сопротивления
, а у хрупких материалов максимальные напряжения должны быть меньше временного сопротивления ![]() . Поэтому предельным состоянием для хрупких материалов считается разрушение, а для пластичных – текучесть и, соответственно, предельные напряжения для хрупких материалов
. Поэтому предельным состоянием для хрупких материалов считается разрушение, а для пластичных – текучесть и, соответственно, предельные напряжения для хрупких материалов ![]() , а для пластичных
, а для пластичных ![]() . Максимальные напряжения в конструкции должны быть меньше, чем предельные. Величина, показывающая во сколько раз максимальные напряжения в конструкции меньше предельных, называется коэффициентом запаса прочности
. Максимальные напряжения в конструкции должны быть меньше, чем предельные. Величина, показывающая во сколько раз максимальные напряжения в конструкции меньше предельных, называется коэффициентом запаса прочности
 ( 2.5 )
( 2.5 )
Для каждой конструкции из опыта эксплуатации задается некоторый нормативный коэффициент запаса прочности, который обозначается [n]. Его величина зависит от тех последствий, которые произойдут при потере работоспособности конструкции. В курсе “Сопротивление материалов” используется [n] = 1,5 – учебный коэффициент запаса. Действительный коэффициент запаса прочности конструкции должен быть равен нормативному, или быть больше его.
 , или
, или  . Величина
. Величина  называется допускаемым напряжением, тогда условие прочности по допускаемым напряжениям запишется
называется допускаемым напряжением, тогда условие прочности по допускаемым напряжениям запишется
![]() ( 2.6 )
( 2.6 )
В частности, при растяжении, при расчете по допускаемым напряжениям имеем  , откуда
, откуда  . Иногда для некоторых видов расчетов условие прочности по допускаемым напряжениям неприменимо ( продольно-поперечный изгиб ). Для них проводится расчет по допускаемым нагрузкам
. Иногда для некоторых видов расчетов условие прочности по допускаемым напряжениям неприменимо ( продольно-поперечный изгиб ). Для них проводится расчет по допускаемым нагрузкам  . Для некоторых конструкций, например, для точных приборов, кроме расчета на прочность проводится расчет еще и на жесткость, по допускаемым перемещениям
. Для некоторых конструкций, например, для точных приборов, кроме расчета на прочность проводится расчет еще и на жесткость, по допускаемым перемещениям  .
.
Здесь ![]() и
и ![]() - предельные нагрузка и перемещение.
- предельные нагрузка и перемещение.
2.4. Растяжение под действием собственного веса
Рассмотрим стержень, закрепленный верхним концом и растягиваемый собственным весом. Длина стержня l, площадь поперечного сечения А, модуль Юнга и удельный вес материала стержня – Е и ![]() ( рис. 2.3 ).
( рис. 2.3 ).
Рис. 2.3 Рис. 2.4
Используем метод сечений ( рис. ![]() ( вес участка стержня длиной z ).
( вес участка стержня длиной z ). 
 ,
,  .
.
Так как зависимость N от z линейная, то эпюра N изображается прямой линией. Чтобы построить прямую линию, нужны две точки.
 ;
;  ;
;  - это вес всего стержня.
- это вес всего стержня.
Эпюра напряжений  - прямая :
- прямая :  ,
,  . Найдем перемещения сечений стержня. По закону Гука при N=const абсолютное удлинение будет
. Найдем перемещения сечений стержня. По закону Гука при N=const абсолютное удлинение будет ![]() . Так как у нас N ≠ const, то применим закон Гука для участка длиной dz, на котором можно считать, вследствие его малости, что N(z) ≈ const. Абсолютное удлинение этого участка
. Так как у нас N ≠ const, то применим закон Гука для участка длиной dz, на котором можно считать, вследствие его малости, что N(z) ≈ const. Абсолютное удлинение этого участка ![]() . Сечение I-I переместится на величину, равную сумме абсолютных удлинений всех участков dz, расположенных выше сечения I-I :
. Сечение I-I переместится на величину, равную сумме абсолютных удлинений всех участков dz, расположенных выше сечения I-I :
 Это уравнение параболы. Для построения эпюры
Это уравнение параболы. Для построения эпюры ![]() нужны три точки.
нужны три точки.
 .
.  .
.  .
.
Если подобрать сечение стержня под действием собственного веса, то в формуле  используется
используется ![]() :
: ![]() . В остальных точках эта площадь оказывается излишней, так как N уменьшается, поэтому с точки зрения оптимального проектирования желательно применять стержни переменного поперечного сечения.
. В остальных точках эта площадь оказывается излишней, так как N уменьшается, поэтому с точки зрения оптимального проектирования желательно применять стержни переменного поперечного сечения.
Лекция № 3
ГЕОМЕТРИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ПЛОСКИХ СЕЧЕНИЙ
3.1. Статические моменты площади и моменты инерции.
Рассмотрим произвольное поперечное сечение стержня. Простейшая геометрическая характеристика сечения – это площадь ( рис. 3.1 )
А = ![]() dA (м2)
dA (м2)
Величины Sx = ![]() ydA (м2) и Sy =
ydA (м2) и Sy = ![]() xdA (м2
xdA (м2
 называются статическими моментами сечения ( или площади ) относительно осей х и у.
называются статическими моментами сечения ( или площади ) относительно осей х и у.
Статический момент сложной фигуры относительно некоторой оси равен сумме статических моментов простых фигур, составляющих эту сложную, относительно той же оси. Оси, проходящие через центр тяжести сечения, называются центральными. Статические моменты сечения относительно центральных осей равны нулю. Статические моменты площади также можно вычислять по формулам:
Sx = Ayc, Sy = Axc, ( 3.2 )
где xc и ус – координаты центра тяжести площади сечения. Чаще всего статические моменты площади используются для определения положения центра тяжести сложной фигуры.
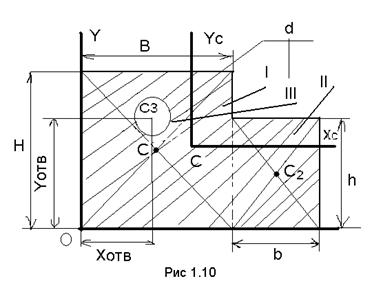
Пример определения положения центра тяжести сложной фигуры.
Разделим сложную фигуру ( рис. 3.2 ) на простые, найдем у них центры тяжести и определим их координаты, а также их площади.
хс1 = В/2, уc1 = H/2, A1 = BH ;
хc2 = B + b/2, уc2 = h/2, A2 = bh ;
хc3 = Xотв, уc3 = Yотв, А3 = pd2/4.
Так как SY = Axc, то
 .
.
Аналогично, из SX = Ayc следует, что

Координаты xc и ус центра тяжести сложной фигуры найдены.
Величины: Ix=![]() y2dA (м4) и Iy =
y2dA (м4) и Iy = ![]() x2dA (м4
x2dA (м4
называются осевыми моментами инерции сечения относительно осей х и у. Ix > 0, Iy > 0.
Величины: Ixy = ![]() xy dA (м4) , ( 3.4 )
xy dA (м4) , ( 3.4 )
Ip =![]() r2dA (м4
r2dA (м4
называются центробежным моментом инерции сечения относительно системы осей х, у и полярным моментом инерции системы относительно полюса 0. Ixy>< 0, IP > 0.
IP = ![]() r2 dA =
r2 dA = ![]() (x2+y2)dA =
(x2+y2)dA = ![]() x2dA +
x2dA + ![]() y2dA = IY + IX .
y2dA = IY + IX .
Величины: Wx = Ix/ êymax ê; Wy = Iy / êxmax ê (м3
называются осевыми моментами сопротивления относительно осей х и у, а величина
Wp = Ip / rmax
- полярным моментом сопротивления.
Величины: ix = ![]()
![]() ; iy =
; iy = ![]() (м
(м
называются радиусами инерции относительно осей х и у.
Примеры определения геометрических характеристик.
Прямоугольное сечение ( рис. Элементарную площадку dA выберем в виде полоски b*dy.
 .
.
Аналогично  и
и  .
.
Круглое сечение ( рис. Ip =![]() r2dA. Элементарную площадку dA выберем в виде кольца радиусом r и толщиной dr. Если развернем кольцо в полоску, то получим, что dA = 2πrdr.
r2dA. Элементарную площадку dA выберем в виде кольца радиусом r и толщиной dr. Если развернем кольцо в полоску, то получим, что dA = 2πrdr.
Ir = ![]() r2dA =
r2dA = ![]() r22πrdr =2π(
r22πrdr =2π(![]() )
)![]() =
=![]() =
= ![]() =
= ![]() » 0,1d4.
» 0,1d4.
Так как Ip = Ix + Iy, то Ix = Iy = ![]() =
= ![]() =
=![]() » 0,05d4.
» 0,05d4.
Wp = ![]() =
= ![]() =
= ![]() =
= ![]() » 0,2d3.
» 0,2d3.
Wx =Wy =  ê=
ê= ![]() =
= ![]() =
= ![]() » 0,1d3 .
» 0,1d3 .
Кольцевое сечение (рис. 3.5). Моменты инерции сложной фигуры равны сумме моментов инерции простых фигур, составляющих эту сложную. Тогда для кольца Ip = Ip большого круга – Ip меньшего круга=
 .
.
Ix = Iy![]() .
.
Моменты сопротивления сложной фигуры не равны сумме моментов сопротивления простых фигур, составляющих эту сложную
Если бы мы ошибочно считали, что моменты сопротивления сложной фигуры равны сумме моментов сопротивления простых фигур, составляющих эту сложную, то в результате получили бы
 , что неверно!!!.
, что неверно!!!.

3.2. Связь между моментами инерции
относительно параллельных осей.
Рассмотрим некоторое поперечное сечение, в котором известен центр тяжести сечения С и через него проведены оси х и у ( рис. Пусть известны моменты инерции сечения относительно центральных осей: Ix, Iy, Ixy, а также расстояния a, b до произвольных осей х1 и у1.
 Требуется определить:
Требуется определить:
Ix1, Iy1, Ix1y1 .
Выразим х1 и у1 через х и у:
x1 = x – b, y1 = y – a.
Тогда
Ix1 = ![]() y12 dA =
y12 dA =![]() (y – a)2dA = =
(y – a)2dA = =![]() y2dA -
y2dA - ![]() 2yadA +
2yadA + ![]() a2dA = =
a2dA = =![]() y2dA – 2a
y2dA – 2a![]() ydA + a2
ydA + a2![]() dA =
dA =
= Ix –2aSx + a2A.
Так как. ось х – центральная ось, то Sx = 0.
Тогда
Ix1 = Ix + a2A, ( 3.9 )
аналогично
Iy1 = Iy + b2A.
Ix1y1=![]() x1y1dA=
x1y1dA=![]() (x–b)(y–a)dA=
(x–b)(y–a)dA=![]() xydA -b
xydA -b![]() ydA - a
ydA - a![]() xdA + ab
xdA + ab![]() dA= = Ixy – bSx – aSy + abA = Ixy +abA
dA= = Ixy – bSx – aSy + abA = Ixy +abA
Эти формулы используются, когда оси х и у – центральные. Из этих формул следует, что Ix = Ix1 – a2A и Iy = Iy1 – b2A, то есть осевые моменты инерции относительно центральных осей является наименьшими по сравнению с осевыми моментами инерции относительно всех осей, параллельных центральным.
3.3. Связь между моментами инерции относительно осей, повернутых друг к другу на угол a.
Известны моменты инерции относительно произвольных осей Ix, Iy, Ixy и угол a. Требуется найти моменты инерции Ix1, Iy1, Ix1y1 относительно повернутых осей ( рис.3.7 ).
![]() y dA
y dA


![]() y1 B ·
y1 B ·
![]() x1
x1
E a
D · F


 K
K
 O G x
O G x
Рис. 3.7
Выразим координаты повернутой системы осей через координаты заданной системы осей.
x1 = OE = OK + KE = OK + GF =OG cosa +GB sina = x cosa + y sina.
y1 = OD = BE = BF – FE = BF – KG = BG cosa - OG sina = y cosa - x sina.
Тогда
Ix1 = ![]() y12 dA =
y12 dA = ![]() ( y cosa - x sina )2 dA = cos2a
( y cosa - x sina )2 dA = cos2a ![]() y2 dA – 2 sina cosa* *
y2 dA – 2 sina cosa* *![]() xy dA + sin2a
xy dA + sin2a ![]() x2 dA = Ix cos2a + Iv sin2a –Ixy sin2a
x2 dA = Ix cos2a + Iv sin2a –Ixy sin2a
Iy1 = ![]() x12 dA =
x12 dA = ![]() ( x cosa+y sina )2 dA = cos2a
( x cosa+y sina )2 dA = cos2a ![]() x2 dA + 2 cosa sina* *
x2 dA + 2 cosa sina* *![]() xy* dA + sin2a
xy* dA + sin2a ![]() y2dA = Iy cos2a + Ix sin2a + Ixy sin2a
y2dA = Iy cos2a + Ix sin2a + Ixy sin2a
Ix1y1 = ![]() x1y1 dA =
x1y1 dA = ![]() ( x cosa + y sina )( y cosa - x sina ) dA =
( x cosa + y sina )( y cosa - x sina ) dA =
=cos2a ![]() x y dA + sina cosa
x y dA + sina cosa ![]() y2 dA - sina cosa
y2 dA - sina cosa ![]() x2 dA – sin2a
x2 dA – sin2a ![]() xy dA= = Ixy ( cos2a - sin2a ) +
xy dA= = Ixy ( cos2a - sin2a ) + ![]() ( Ix – Iy ) =
( Ix – Iy ) = ![]() + Ixy cos2a
+ Ixy cos2a
Сложим ( 3.11) и ( 3Получим Ix1 + Iy1 = Ix + Iy = const, то есть сумма осевых моментов инерции относительно взаимно перпендикулярных осей проходящих через данную точку есть величина постоянная.
3.4. Главные оси инерции. Главные моменты инерции.
Если меняется угол a при повороте осей, то будут меняться Ix1 , Iy1 и Ix1y1, но всегда Ix1>0, Iy1 > 0 и Ix1y1>< 0 . При некотором положении угла a = a0, центробежный момент инерции Ix1y1 обратиться в ноль.
Зафиксируем это положение осей ( рис.3.8 ).
 Оси, относительно которых Ix0y0 = 0, называются главными и обозначаются х0 - у0 или u - v. Найдем положение главных осей. Для этого в формуле ( 3.13 ) вместо a подставим a0, а вместо Ix1, Iy1 подставим Ix0, Iy0.
Оси, относительно которых Ix0y0 = 0, называются главными и обозначаются х0 - у0 или u - v. Найдем положение главных осей. Для этого в формуле ( 3.13 ) вместо a подставим a0, а вместо Ix1, Iy1 подставим Ix0, Iy0.
Ix0y0 = ![]() Ixycos2a0 = 0.
Ixycos2a0 = 0.  = -Ixycos2a0;
= -Ixycos2a0; 
Окончательно  ( 3.14 )
( 3.14 )
Подставляем значение a0 в ( 3.11 ) и в ( 3.12 ) , найдем осевые моменты инерции относительно главных осей
Iu = Ix0 = Ixcos2a0 + Iysin2a0 – Ixysin2a
Iv = Iy0 = Iycos2a0 + Ixsin2a0 + Ixysin2a
Осевые моменты инерции относительно главных осей называются главными моментами инерции.
Исследуем значение осевого момента инерции на экстремум в зависимости от угла a. Возьмем производную от выражения ( 3.11 ) по a и приравниваем ее к нулю.
dIy1 / da = Ix2sinacosa - Iy2cosa sina + Ixy2cos2a = 0.
(Ix – Iy)sin2a = - Ixy 2cos2a. sin2a/cos2a = - 2Ixy / (Ix – Iy) = tg2a,
то есть α=α0
Осевые моменты инерции относительно главных осей принимают экстремальные значения по сравнению с осевыми моментами инерции относительно всех взаимно перпендикулярных осей, проходящих через данную точку.
Главные оси, проходящие через центр тяжести, называются главными центральными осями, а соответствующие моменты инерции – главными центральный моментами инерции. Один из этих моментов инерции является наименьшим по сравнению со всеми осевыми моментами инерции сечения относительно любой оси.
Выражения ( 3.15 ) и ( 3.16 ) можно преобразовать таким образом, чтобы в них не входил угол a. Вычтем выражение ( 3.16 ) из выражения ( 3.15 ).
Iu - Iv = Ix(cos2a0-sin2a0)-Iy(cos2a0-sin2a0)-2Ixysin2a0=(Ix-Iy)cos2a0-2Ixysin2a0
Из уравнения ( 3.14 ) следует, что -2 Ixy= ( Ix - Iy ) tg 2 a0
Тогда
 ( 3.17 )
( 3.17 )
Сложим выражения ( 3.15 ) и ( 3.16 )
Iu + Iv = Ix+ Iy
Сложим выражения ( 3.17 ) и ( 3.18 ), затем вычтем из выражения (3.18) выражение ( 3.17 ) и, разделив результаты на 2, окончательно получим
 ( 3.19 )
( 3.19 )
Лекция № 4
СДВИГ И КРУЧЕНИЕ
4.1. Чистый сдвиг
 В том случае, когда из всех внутренних сил не равна нулю только поперечная сила, материал испытывает сдвиг. Экспериментально доказано, что напряжения при сдвиге равномерно распределяются по площади. Если по граням элемента действуют только касательные напряжения, то материал элемента испытывает деформацию чистого сдвига. Рассмотрим некоторое тело единичной толщины ( рис.На грани CD под действием силы Q возникают касательные напряжения
В том случае, когда из всех внутренних сил не равна нулю только поперечная сила, материал испытывает сдвиг. Экспериментально доказано, что напряжения при сдвиге равномерно распределяются по площади. Если по граням элемента действуют только касательные напряжения, то материал элемента испытывает деформацию чистого сдвига. Рассмотрим некоторое тело единичной толщины ( рис.На грани CD под действием силы Q возникают касательные напряжения
 .
.
По закону парности касатель-ных напряжений, такие же напря-жения возникают на остальных гранях тела. От действия τ верхняя грань CD переместится в положение C1D1, сдвинувшись на величину DD1, равную
![]() , называемую абсолютным сдвигом. Все прямые углы элемента станут тупыми и острыми, изменившись на величину g, называемую углом сдвига.
, называемую абсолютным сдвигом. Все прямые углы элемента станут тупыми и острыми, изменившись на величину g, называемую углом сдвига.  . Так как угол g мал, то
. Так как угол g мал, то ![]() и
и ![]() .
.
Рассмотрим деформацию диагонали ![]() c двух точек зрения.
c двух точек зрения.
С геометрической точки зрения. Свяжем удлинение диагонали BD и абсолютный сдвиг. Считаем, что ![]() .Тогда
.Тогда ![]() Деформация диагонали
Деформация диагонали ![]() будет
будет
С точки зрения напряженного состояния. Рассматриваемый элемент испытывает плоское напряженное состояние. Определим положение главных площадок.
 откуда
откуда ![]() и
и 
Таким образом, главные площадки расположены под углом ![]() к заданным. Найдем величины главных напряжений
к заданным. Найдем величины главных напряжений
 s 2 = 0.
s 2 = 0.
При чистом сдвиге главные напряжения равны по величине и противоположны по знаку. Для определения деформации диагонали BD используем обобщенный закон Гука  . Приравняем значения:
. Приравняем значения:
![]() , откуда следует, что
, откуда следует, что ![]() . Обозначим
. Обозначим  .
.
Упругая постоянная G называется модулем сдвига, или модулем поперечной упругости, или модулем упругости второго рода. Из последней формулы следует, что упругие характеристики материала G, E и m связаны между собой. Тогда закон Гука при сдвиге запишется

Найдем потенциальную энергию деформации при сдвиге. Площадь верхней грани тела ( рис.4.1 ) равна ![]() . Сдвигающиеся сила
. Сдвигающиеся сила  . Потенциальная энергия деформации данного элемента
. Потенциальная энергия деформации данного элемента ![]() равна работе
равна работе ![]() внешней силы на перемещении
внешней силы на перемещении![]()
![]() .
.
Разделив полученную величину на объем V = aа1 тела, найдем удельную потенциальную энергию деформации ![]() . Из выражения ( 4.1 ) получим
. Из выражения ( 4.1 ) получим ![]() . Тогда
. Тогда 
4.2. Кручение прямого стержня круглого поперечного сечения
Стержень, работающий на кручение, называется валом. При кручении в поперечном сечении вала возникает одно внутреннее усилие - крутящий момент ![]() .
. ![]() определяют на каждом участке вала с помощью метода сечений.
определяют на каждом участке вала с помощью метода сечений. ![]() равен алгебраической сумме всех закручивающих моментов, взятых по одну или по другую сторону от сечения. При этом, если смотреть со стороны сечения на рассматриваемую часть вала, то закручивающий момент, вращающий против часовой стрелки, считается положительным.
равен алгебраической сумме всех закручивающих моментов, взятых по одну или по другую сторону от сечения. При этом, если смотреть со стороны сечения на рассматриваемую часть вала, то закручивающий момент, вращающий против часовой стрелки, считается положительным.
Введем следующие допущения, подкрепленные экспериментально для валов круглого и кольцевого поперечных сечений:
1.Плоские поперечные сечения вала, перпендикулярные его оси до кручения, остаются плоскими и перпендикулярными оси во время кручения, поворачиваясь относительно друг друга на некоторый угол.
2.Прямые радиусы, проведенные в этих сечениях, остаются прямыми при кручении.
3. Расстояние между сечениями во время кручения не меняется.
Рассмотрим вал, находящийся в состоянии кручения ( рис.4.2,а ). Проведем два плоских сечения, перпендикулярных оси вала, и расположенных на расстоянии ![]() друг от друга. Во время кручения второе сечение ( рис.4.2,б ) повернется относительно первого, и образующая
друг от друга. Во время кручения второе сечение ( рис.4.2,б ) повернется относительно первого, и образующая ![]() займет положение
займет положение ![]() . Радиус повернется на некоторый угол
. Радиус повернется на некоторый угол ![]() и примет положение
и примет положение ![]() . Из
. Из ![]() :
:  .
.
Из треугольника ![]() :
:  . Поэтому
. Поэтому ![]() , или
, или  .
.
 |
Обозначим ![]() - относительный угол закручивания. Тогда
- относительный угол закручивания. Тогда ![]() .
.
Из ( рис. 4.2,б ) видно, что материал при кручении испытывает деформацию сдвига, и по закону Гука при сдвиге касательные напряжения равны.
Рассмотрим поперечное сечение вала ( рис. Выделим площадку ![]() . Здесь
. Здесь ![]() перпендикулярно
перпендикулярно ![]() . Тогда элементарный крутящий момент будет:
. Тогда элементарный крутящий момент будет: .
.
Полный крутящий момент
 .
.
Отсюда находим относительный угол закручивания  .
.
 Подставляем его в ( 5.3 ) и получим формулу для определения касательных напряжений в сечении вала при кручении :
Подставляем его в ( 5.3 ) и получим формулу для определения касательных напряжений в сечении вала при кручении :
Максимальное касательное напряжение ![]() возникают при
возникают при ![]() ( рис. 4.8 )
( рис. 4.8 )
Запишем условие прочности: ![]() .
.  .
.
Из условия прочности находим формулу для подбора размера поперечного сечения вала: 
Для круглого поперечного сечения :![]() ,
,  ,
,  .
.
Определим перемещение при кручении.
Подставим  в
в  . Тогда
. Тогда  , и
, и 
Угол закручивания участка вала длиной ℓ будет:  .
.
Обычно вал делится на участки, на которых  и жесткость вала
и жесткость вала ![]() , тогда
, тогда
В некоторых конструкциях необходимо, чтобы угол закручивания не превышал допустимый угол закручивания ![]() . Тогда из условия жесткости
. Тогда из условия жесткости
вала ![]() , получим
, получим  .
.
Для вала круглого поперечного сечения
 ,
,  ,
,  .
.
4.3. Соединения деталей
На сдвиг работают шпонки, штифты, заклепочные, сварные, и другие соединения. При действии нагрузки в этих соединениях, кроме сдвига, возникает смятие и изгиб. Такое явление на практике называется срезом.
Заклепочное соединение.
Конструктивное оформление заклепочного соединения показано на рис.4.
Расчет прочности по напряжениям среза
![]()
 .
.
Рис. 4
Расчет прочности по напряжениям смятия
 ,
,
где Q - нагрузка; z – количество заклепок; d - толщина соединяемых листов; d - диаметр заклепки. В формулах для расчета заклепочного соединения [sСМ] и [t] - соответственно допускаемые напряжения смятия и среза.
Пример. Если геометрические параметры заклепочного соединения равны d = 5 мм; d= 4 мм. Число заклепок z = 1. Нагрузка на соединение Q = 1000 Н, то в заклепочном соединении действуют напряжения:
t = 4×1000/3.14×25×10-6 = 51 МПа, sСМ = 1000/4×5×10-6 = 50 МПа.
Сварные соединения.
1) Стыковое соединение листовых материалов. Рис. 5.
При стыковом сварном соединении листов действуют нормальные напряжения sР.
Рис. 5
Расчетная формула:
sР = Q/d×l £ [sP],
где d и l – соответственно толщина листов и длина сварного шва.
Пример. Пусть Q = 104 Н, d = 4 мм, l = 50 мм. Определить напряжение в шве. Решение:
sР = Q/(d×l) = 104/(4×50×10-6) = 50 МПа.
2) Соединение листов в нахлестку лобовым (катетным) швом.
Рис. 6. В данном случае действуют касательные напряжения t.

Рис.6
На рис. 6 обозначены: к – катет треугольного в сечении шва; l – длина шва.
При небольших толщинах листов (1¸6 мм) величина катета при расчетах прочности сварного соединения принимается равной толщине листа.
Расчетная формула:
t = 1,4×Q/к×l £ [t].
При проектировании сварного соединения нужно иметь в виду, что при одинаковых геометрических параметрах сварного узла напряжения в катетном (лобовом) шве получаются на 40% больше, чем при стыковом соединении.
Пример. Такие же листы, как в предыдущем примере, соединяются внахлестку. При толщине листа d = 4 мм к = d = 4 мм. Напряжение t в сварном шве:
t = 1,4×Q/к×l = 1,4×104/ 4×50×10-6 = 70 МПа.
Различие напряжений в стыковом и катетном швах составит 20 МПа, то есть 40%.
Резьбовые соединения.
Резьбовыми соединениями называют разъемные соединения деталей с помощью резьбовых крепежных деталей – винтов, болтов, шпилек, гаек или резьбы, нанесенной непосредственно на соединяемые детали.
Пример резьбового соединения деталей с указанием номинального размера резьбы и посадки показан на рис.1.
Резьба образуется путем нанесения на поверхность деталей винтовых канавок с сечением согласно профилю резьбы. Образованные таким обра-зом выступы и канавки носят название витков резьбы. Термин «резьба» произошел от технологического процесса ее изготовления – нарезания.
Термин «винт» применяется как общий (объединяющий также болты и шпильки) и как частный (винт, вращаемый при завинчивании и отвин-чивании, т. е. ввинчивающийся в деталь). Винты работают во взаймодействии с гайками или с другими деталями, имеющими резьбу.
Гайка – это деталь с резьбовым отверстием, навинчиваемая на винт.
Резьбовые соединения имеют большое распространение в машинострении. Детали, имеющие резьбу, составляют 60% от общего количества деталей. К ним относят крепежные детали (болты, винты, шпильки, гайки), большинство корпусных деталей с резьбовыми отверстиями для крепления деталей устройства, а также множество других деталей, имеющих резьбу.
Крепежные винты относятся к числу весьма напряженных деталей, случаются аварии машин, связанные с разрушением ответственных резьбовых соединений. В условиях контроля начальной затяжки и хорошего стопорения резьбовые соединения обеспечивают надлежащую надежность.
Для крепежных деталей разработаны материалы, обладающие высокими прочностными характеристиками. В необходимых случаях применяют коррозионно устойчивые материалы или защитные покрытия.
Резьба характеризуется следующими параметрами :
1) d – наружный диаметр резьбы;
2) d1 – внутренний диаметр резьбы;
3) d2 – средний диаметр резьбы;
4) a - угол профиля резьбы;
5) Р – шаг резьбы;
6) t – ход резьбы (для многозаходных резьб t = n*Р, где n – число заходов резьбы). В однозаходной резьбе t = Р.
7) y = t/p*d2 – угол подъема витков резьбы.
Резьбовые детали чаще всего изготовляют из мало - и среднеуглеро-дистых сталей марок Ст3, Ст4, Ст5, а также из качественных сталей марок 10 – 45. Мелкие резьбовые изделия делают из автоматной стали марок А12, А20, А30. В механизмах приборов резьбовые изделия часто изгото-вляют из латуни Л59-1. Для ответственных резьбовых деталей, подверга-ющихся действию переменных и ударных нагрузок, применяются легиро-ванные стали 40Х, 30ХН, 30ХН3. Резьбовые изделия, работающие в агрес-сивных средах, изготовляют из нержавеющих сталей марок Х18, 3Х13.
Выбор допускаемого напряжения при расчете резьбового узла зависит от назначаемых материалов и вида действующей нагрузки. В таблице 1 приведены необходимые прочностные характеристики наиболее часто применяемых сталей для крепежных изделий. Ответственные резьбовые детали, работающие в тяжелых условиях изготовляют из сталей 45 или 40Х в закаленном состоянии.
Таблица 1
| Допускаемые напряжения | |||||||||
Марка стали | термообработка | sи (МПа) | sр (МПа) | tср (МПа) | ||||||
Вид нагрузки | Вид нагрузки | Вид нагрузки | ||||||||
1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | ||
Ст15 | Нормализация | 95 | 80 | 60 | 85 | 70 | 50 | 80 | 60 | 45 |
Ст30 | Нормализация Закалка HRc 33-43 | 130 260 | 110 190 | 80 130 | 110 230 | 90 170 | 70 110 | 100 200 | 85 150 | 65 100 |
Ст45 | ЗакалкаHRc 38-48 | 300 | 220 | 145 | 260 | 190 | 125 | 240 | 180 | 115 |
Ст40Х | Закалка HRc 37-41 | 430 | 310 | 190 | 370 | 270 | 165 | 340 | 245 | 150 |
В таблице 1 цифрами 1,2,3 обозначены виды нагрузки:
1 – статическая, 2 – переменная, действующая от 0 до максимума и от максимума до н – знакопеременная (симметричная).
Расчет стержня болта (винта) на прочность
при различных способах нагружения
1. Стержень грузового болта воспринимает внешнюю растягивающую нагрузку. Пример соединения показан на рис.2. Опасным является сечение, ослабленное резьбой. Площадь этого сечения для метрических резьб оценивается по внутреннему диаметру резьбы. Если нет предварительной затяжки, то условие прочности по напряжениям растяжения в стержне имеет вид
s = 4F/pd12 £ [sp] , (1)
где F - растягивающая нагрузка. Используя это выражение можно определить внутренний диаметр болта, способного выдержать нагрузку F. Предварительно нужно выбрать материал детали, термообработку и выписать допускаемое напряжение растяжения.
Пример: F = 104 H – статическая нагрузка, материал для болта Ст45, термообработка закалка HRc 38 – 48. По таблице 1 выбираем допускаемое напряжение разрыва [sр] = 260 Мпа для первого вида нагрузки. Для подвесов грузовых устройств принято назначать коэффициент запаса прочности, увеличивающий безопасность устройства. Примем коэффициент запаса прочности n = 2. Определим внутренний диаметр резьбы болта
d1 = ![]()
![]()
![]()
По ГОСТу выбираем резьбу с ближайшим большим значением внутреннего диаметра резьбы. В данном случае подходит резьба М12, имеющая внутренний диаметр резьбы d1 = 10.1 мм.
Считается, что соединение должно нормально работать и при ослаблении затяжки резьбового соединения. Для этого стержень болта рассчитывается по напряжениям среза и смятия.
Условие прочности по напряжениям среза имеет вид
t = 4F/(pd2 b) £ [t] , (8)
где b = z – 1 – число плоскостей стыка (z – число соединямых деталей).
Расчет на смятие выполняют по условным напряжениям. Условно принимают напряжения смятия равномерно распределенными по диаметральному сечению рассматриваемого участка стержня. Тогда условие прочности по напряжениям смятия можно записать в виде : для средней детали sсм = F/d×h2 £ [sсм]; для крайних деталей
sсм = F/[d(h1+h3)] £ [sсм] (9)
Здесь h2, h3 – толщина соединяемых деталей 2 и 3; h1 – толщина детали 1 в пределах стержня болта без резьбы.
Шпоночные и шлицевые соединения.
Областью применения шлицевых и шпоночных соединений является передача моментов движения валов передаточных механизмов. Основными видами шпонок являются шпонки призматические и сегментные. Шлицевые соединения различаются по виду профиля шлица в диаметральном сечении вала. Применяются шлицы с профилями: прямоугольный, эвольвентный, треугольный. В основном применяются шлицы прямоугольного профиля.
Шпоночное соединение применяется там, где детали, например вал и полумуфта относительно неподвижны. Пример шпоночного соединения с указанием посадок представлен на рис. 3.
Шлицевое соединение сложнее конструктивно и дороже в изготовлении. Оно применяется там, где требуется большая нагрузочная способность по сравнению со шлицевым соединением, (при тех же геометрических параметрах узла) или подвижность деталей в осевом направлении.
Основная формула расчета прочности шпоночного соединения
Ммах = 0,5×d×(0,45×h)×l×[sСМ],
где d – диаметр вала; h – высота шпонки; l – длина шпонки; [sСМ] - допускаемое напряжение смятия для материала шпонки.
Рис. 3
Упрощенная формула для расчета шлицевого соединения
Ммах = y×z×h×l×![]() ,
,
где y = (0,7….1) – коэффициент неравномерности распределения нагрузки; z - количество шлицев; h – высота профиля шлица; l – длина шлицевого соединения; dСР – средний диаметр; [sСМ] - допускаемое напряжение смятия для материала шлицев.
Прессовое соединение.
Упрощенное определение усилия Q запрессовки (прочности прессового соединения) по принимаемым давлению р между сопряженными поверхностями и коэффициенту трения (f) определяется по формуле
Q = p×f×S [H],
где S – площадь сопряжения.
Пример 1. Пусть р = 10 МПа, f = 0,2, геометрические параметры: диаметр d = 40 мм, длина втулки l = 50 мм. Определим допускаемое усилие Q в прессовом соединении:
Q = p×f×l×p×d = 10×106×0,2×50×10-3×3.14×40×10-3 = 12560 Н.
Пример 2. Значение момента, который может передать прессовое соединение по данным предыдущего примера, определяется следующим образом:
М = 0,5×p×р×f×l×d2 = 0,5×3,14×10×106×0,2×50×10-3×1600×10-6 = 251,2 Нм.
Муфты.
Применяются для соединения валов, труб и иных цилиндрических деталей. Расчет зависит от конструкции муфты.
4.4. Передачи вращательного движения. Приводы.
Зубчатые передачи.
Бывают цилиндрические, конические червячные, гипоидные и другие зубчатые передачи. Расчет проводят как по напряжениям изгиба так и по контактным напряжениям. Для этого вначале проводят расчет момен-тов и усилий в передачах. При определении моментов на валах передачи используются передаточные числа и к. п.д. узлов передаточного механизма. Если нужно определить момент на валу, то можно использовать мощность на этом валу и его число оборотов.
Пример. Определить максимальный крутящий момент на выходном валу зубчатого редуктора, с частотой вращения 50 об/мин, если мощность электродвигателя Pдв=10 кВт, КПД редуктора 0,9, КПД цепной передачи 0,94. Тогда момент на выходном валу редуктора с учетом его КПД равен
М = 9550×Р×h/n =9550×10×0,9/50 = 1719 Нм.
Приводы.
Устройства, преобразующие и передающие энергию называются приводами. Так, например, электропривод ленточного конвейера включает в себя асинхронный трехфазный электродвигатель, соединен-ный с помощью муфты с упругими амортизирующими элементами с двухступенчатым червячно–цилиндрическим редуктором. Передача движения от редуктора к валу приводного барабана конвейера осущест-вляется посредством цепной передачи, ведущая звездочка которой ставится непосредственно на выходной вал редуктора. Расчет привода состоит из определения кинематических и динамических характеристик электропривода, выбора электродвигателя, расчета усилий в передачах и определении их размеров.
Ременные передачи.
Бывают с плоскими и клиновыми ремнями. Стандартом предусматриваются ремни определенного сечения (обозначение сечений: О, А, Б, В и т. д.) и длины в развернутом (разрезанном) виде. Сечение ремня выбирается в зависимости от нагрузки, а длина ремня – в зависи-мости от диаметров шкивов и межосевого расстояния. Необходимо предусматривать устройство для натяжения ремня.
В материале ремня действуют напряжение нормальное от действу-ющих усилий в ветвях ремня; напряжение изгиба, возникающее при обегании ремнем шкива; напряжение от действия центробежных сил характерно в основном для быстроходных механизмов с числом оборотов валов более 3000 об/мин.
Валы и оси. Подшипники.
Вал – это деталь предназначенная для передачи крутящего момента вдоль своей оси. Нагрузкой для валов являются изгибающие и крутящие моменты. Рассчитываются на изгиб с кручением.
Ось – это деталь, предназначенная для поддержания вращающихся деталей и не передающая полезного крутящего момента. Момент от сил трения обычно бывает на порядок меньше по сравнению с изгибающими моментами и в расчетах прочности оси не учитывается. Рассчитываются на изгиб.
Вал-шестерня
Материал для валов. Если действующие нагрузки не велики, то возможно применение дешевой и легко обрабатываемой Ст30. Валы часто несут большие нагрузки, поэтому для их изготовления применяют высоко-прочные закаливаемые стали: Ст45, 40Х, 40ХВН, 40ХН2МА.
Ось
Подшипники качения.
Основные типы подшипников качения показаны на рис.
|
Радиальный шариковый подшипник.
Подшипники легкой, средней серии отличаются между собой разной нагрузочной способностью.
|
Роликовый подшипник.
|

Подшипник шариковый упорный.
Главным образом на работоспособность влияют контактные напряжения между шариками (роликами) и кольцами подшипника. Увеличение диаметра шарика (ролика) приводит к увеличению контактной площадки и уменьшению напряжений.
Если на вал действуют радиальные и осевая силы, то выбирают радиально-упорный шариковый подшипник. В то же время при достаточной жесткости валов и точности изготовления корпуса применение роликовых радиально-упорных подшипников приводит к уменьшению габаритов подшипникового узла. Стоимость роликовых подшипников мало отличается от стоимости шариковых. Во всех случаях необходимо предусмотреть регулировку осевого зазора.
Подшипники скольжения.
Подшипники скольжения применяются там, где по условиям сборки необходим разъем в осевой плоскости, а также при очень малых размерах цапф валов; для точного центрирования. Для работы подшипника скольжения, особенно при больших нагрузках и скоростях движения, нужна непрерывная смазка.
Материалы для подшипников скольжения (в порядке уменьшения антифрикционных качеств):
1) баббиты Б88, БК2 и пр., их отличительная особенность – очень малое значение коэффициента трения, но не высокая теплостойкость;
2) оловянистые бронзы БрО10Ф1, БрО4Ц4С17 наиболее предпочтительны по всем показателям, несколько хуже по антифрикционным свойствам безоловянистые бронзы, например БрАЖ9-4;
3) антифрикционные чугуны, например АЧС-1.
Расчет подшипника скольжения связан с определением давления, скорости скольжения и сравнении этих величин с допускаемыми значениями для данных материалов.
