

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Санкт-Петербургский государственный электротехнический университет.
Кафедра корабельных систем управления
Лабораторная работа №1
«Исследование микроакселерометра ADXL202-EB-232A»
выполнили:
группа: 3461
факультет: ЭА
СПб 2007г.
Цель работы:
Цель работы – изучение основных свойств микроакселерометра ADXL202-EB-232A, входящего в состав инерциального измерительного модуля.
Описание работы:
Лабораторная установка представляет собой поворотную платформу с горизонтальной z (рис. 1) и вертикальной x осями вращения.
Рис. 1.
В лабораторной работе мы выполняем градуировку акселерометра в гравитационном поле Земли, когда в качестве вектора ускорения используется вектор ускорения силы тяжести, ориентированный в первом приближении по нормали к горизонтальной плоскости. В начальный момент времени измерительные оси акселерометра y и z на рис. 1. ориентированы в горизонтальной плоскости. Горизонт (или горизонтальную плоскость) можно выставить по пузырьковому уровню. Затем необходимо выставить платформу в вертикальное положение (+90 или –90о) с помощью винта 5. При этом отсчет углового положения акселерометра определяют по лимбу 1. Затем, используя винт 5, вращают платформу вокруг оси z из вертикального положения, меняя проекцию вектора ускорения силы тяжести g на ось y. На втором этапе сначала необходимо повернуть платформу по лимбу 4 на 90º с помощью винта 2 вокруг оси x и снова выставить платформу в вертикальное положение (+90 или –90о). После этого, вращая платформу из вертикального положения вокруг оси y, меняют проекцию силы тяжести Ax на ось z.
Процедура измерений сводится к заданию фиксированных углов наклона платформы, отсчитываемых по лимбу, и сопоставления им результатов измерений, полученных с выхода микроакселерометра с помощью специального программного обеспечения. Необходимо учитывать, что данные записываются в коде, при этом 5 В (выходной сигнал МА имеет значение 0…5 В в зависимости от величины действующего ускорения) соответствует код «4095» . Поэтому для пересчета полученного кода в вольты необходимо его разделить на 4095 и умножить на 5. Например, имеется код «2245». Ему соответствует (2245/4095)×5 = 1.096 ≈ 1.1 (В).
При проведении работы требуется получить зависимость выходного сигнала акселерометра от углов отклонения платформы относительно плоскости горизонта. Рекомендуемый шаг изменения углового положения платформы – 10о. Акселерометр наиболее чувствителен к наклону, когда его ось чувствительности перпендикулярна ускорению силы тяжести (вектору g), т. е. параллельна поверхности Земли. При такой ориентации чувствительность к изменениям угла наклона является самой высокой. Когда акселерометр ориентируется по оси ускорения силы тяжести, т. е. вблизи показаний +1 g или –1 g (вертикальное положение платформы), изменение в выходном ускорении, приходящееся на единицу градуса, незначительно.
Таблицы результатов эксперимента:
Ориентация оси по отношению к горизонту | Ось Y | Ось Z |
-90 | 3,04 | 2,04 |
-80 | 3,04 | 2,05 |
-70 | 3,02 | 2,05 |
-60 | 3 | 2,07 |
-50 | 2,97 | 2,09 |
-40 | 2,93 | 2.14 |
-30 | 2,88 | 2.17 |
-20 | 2,83 | 2.24 |
-10 | 2,78 | 2.31 |
0 | 2,72 | 2.24 |
10 | 2,67 | 2.41 |
20 | 2,62 | 2.46 |
30 | 2,57 | 2.53 |
40 | 2,52 | 2.55 |
50 | 2,48 | 2.59 |
60 | 2,45 | 2.62 |
70 | 2,43 | 3.64 |
80 | 2,41 | 3.66 |
90 | 2,41 | 3,67 |
График зависимости выходного сигнала акселерометра по оси Y от углов отклонения платформы относительно плоскости горизонта:
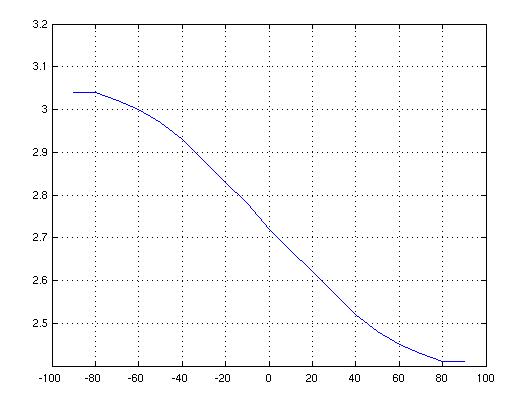
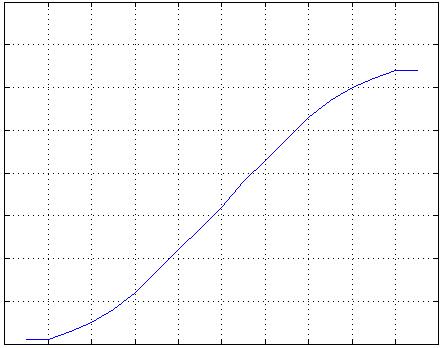
График зависимости выходного сигнала акселерометра по оси Z от углов отклонения платформы относительно плоскости горизонта:
Вывод:
Полученные нами зависимости выходного сигнала от угла наклона платформы полностью совпадают с ожидаемыми характеристиками микроакселерометра.
