
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1. Назначение, структурная схема и принципы работы системы стабилизации движения ракеты.
На предыдущем занятии указывалось, что с помощью акселеромеров, измерительно-преобразовательные головки которых установлены на платформе ТГС, в БВУ АСУр поступает информация о проекциях ![]() ,
, ![]() ,
, ![]() - текущего вектора кажущегося ускорения движения центра масс ракеты на фиксированные в инерциальном пространстве направления. Датчики команд, установленные по осям платформы и рам карданова подвеса ТГС, обеспечивают БВУ АСУр информацией о текущих углах тангажа, рыскания ракеты u, y и j.
- текущего вектора кажущегося ускорения движения центра масс ракеты на фиксированные в инерциальном пространстве направления. Датчики команд, установленные по осям платформы и рам карданова подвеса ТГС, обеспечивают БВУ АСУр информацией о текущих углах тангажа, рыскания ракеты u, y и j.
В АСУр эта информация необходима для решения двух задач:
- стабилизации движения ракеты относительно расчетной траектории;
- формирования и (или) коррекции расчетной траектории и выбора моментов выключения двигателей последней ступени ракеты, отделения ГЧ и боевых элементов, обеспечивающих их неуправляемое движение по попадающим траекториям (задача наведения ракеты на цель).
Первая задача решается системой стабилизации движения ракеты. При использовании параметрической программы угла тангажа («гибкого» наведения) система стабилизации движения ракеты на участке выведения предназначена для устойчивой отработки программ углового движения и сведения к минимуму отклонения центра масс ракеты в боковом направлении.
Система стабилизации движения ракеты состоит из объекта управления (ракеты) ОУ-р и автомата стабилизации АС (рис.1). Она имеет большой (внешний) контур - систему боковой стабилизации (СБС) - и малый (внутренний) контур (СУС). Оба контура связаны между собой через общие элементы - рулевые приводы с управляющими органами ракеты.

Рис.1. Структурная схема системы стабилизации движения
ОУ-р условно можно представить двумя блоками - блоком углового движения с параметрами на выходе u, y и j и блоком движения центра масс в боковой плоскости с выходной величиной ![]() , которую приближенно можно считать равной действительному ускорению
, которую приближенно можно считать равной действительному ускорению ![]() движения центра масс ракеты в направлении оси Z стартовой СК или оси z геоцентрической инерциальной СК (составляющая вектора g на ось Z или z пренебрежимо мала).
движения центра масс ракеты в направлении оси Z стартовой СК или оси z геоцентрической инерциальной СК (составляющая вектора g на ось Z или z пренебрежимо мала).
Система стабилизации представляет собой совокупность ТГС с датчиками команд ДКu, ДКy, ДКj и акселерометром Аg, бортового вычислительного устройства БВУ и рулевых приводов РПР, РПТ с управляющими органами У0Р и УОТ.
Рис.2. Программа угла вращения. |
Система стабилизации работает следующим образом. Углы u, y и j , а также боковое ускорение ![]() , измеряются соответственно датчиками команд ДКu, ДКy, ДКj и акселерометром Аg. Электрические сигналы с этих измерительных устройств поступают в БВУ.
, измеряются соответственно датчиками команд ДКu, ДКy, ДКj и акселерометром Аg. Электрические сигналы с этих измерительных устройств поступают в БВУ.
БВУ обеспечивает формирование управляющих сигналов на рулевые приводы ракеты. Процесс формирования сигналов управления в БВУ можно представить состоящим из трех основных этапов.
На первом этапе формируются программные значения углов тангажа (uПР), рыскания (yПР) и вращения (jПР), что входит в задачу системы наведения ракеты. Программный угол тангажа может формироваться, например, в функции проекции кажущейся скорости на одну из осей геоцентрической инерциальной системы координат на основе результатов прогноза точки падения или как функция времени. Программный угол вращения обычно задается в функции времени (рис.2) для вертикального участка траектории ракеты с целью отработки начального значения этого угла j0, соответствующего азимутальному развороту платформы ТГС перед пуском ракеты. После отработки программы угла вращения основная плоскость симметрии ракеты, как правило, находится в плоскости стрельбы, что обеспечивает наклон траектории движения ракеты в сторону цели, а программное значение угла вращения становится равным нулю. Кроме того, на первом этапе в БВУ формируются рассогласования Du=u-uПР; Dy = y-yПР; Dj = j-jПР между измеряемыми и программными значениями углов тангажа, рыскания и вращения, а также осуществляется двойное интегрирование сигнала с акселерометра AZ с целью получения информации о боковой скорости ракеты ![]() и боковом отклонении
и боковом отклонении ![]() .
.
На втором этапе в соответствии с алгоритмами угловой и боковой стабилизации, использующими информацию о Du, Dy и Dj, ![]() и
и ![]() , формируются управляющие сигналы в боковой плоскости (sр), плоскости стрельбы (sт) и управляющий сигнал (sв) для стабилизации угла вращения (не показанный на рис.1).
, формируются управляющие сигналы в боковой плоскости (sр), плоскости стрельбы (sт) и управляющий сигнал (sв) для стабилизации угла вращения (не показанный на рис.1).
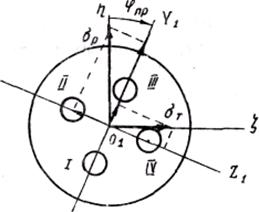
На третьем этапе осуществляется распределение управляющих сигналов sр, sт и sв по рулевым приводам, расположенным обычно в основной и боковой плоскостях симметрии ракеты (проводится операция преобразования координат - ПК). Необходимость проведения операции преобразования координат объясняется несовпадением основной и боковой плоскости симметрии ракеты с плоскостями XOCY и XOCZ стартовой СК (или плоскостями z0h и z0x геоцентрической инерциальной СК) при отработке программного угла вращения jПР на начальном участке траектории движения ракеты (рис.3.).
Рис.3. Преобразование координат. |
Принцип преобразования координат разъясняется студентам в случае наличия резерва времени на занятии либо слабой общетехнической подготовкой.
Принцип формирования алгоритмов преобразования координат поясним для простейшего случая, когда продольная ось ракеты совпадает с осью x геоцентрической СК, начало которой перенесено в центр масс ракеты, а основная плоскость симметрии ракеты развернута относительно плоскости стрельбы z0h на угол jПР. Поскольку управляющие сигналы sр и sт пропорциональны моментам стабилизирующих сил, предназначенным для ликвидации угловых отклонений ракеты соответственно по углам рыскания и тангажа, то они могут быть изображены в виде векторов, направленных по осям h и z. Из рис.3 видно, что для создания требуемых моментов стабилизирующих сил по осям Y1 и Z1 с помощью управляющих органов ракеты, расположенных по осям Y, и Z, связанной СК, необходимо спроектировать векторы sр и sт на оси Y, и Z, и сложить алгебраически по одноименным осям полученные проекции. В результате получаются управляющие сигналы sI-III и sII-IV в соответствии с выражениями:
являющимися простейшими алгоритмами преобразования координат. В БВУ систем управления штатных ракет, учитывая, во-первых, несовпадение направлений осей системы координат, связанной с осями карданова подвеса ТГС, геоцентрической инерциальной СК 0zhx и связанной СК OX1Y1Z1, во-вторых, необходимость проведения достаточно сложных программных угловых маневров по углам тангажа и рыскания (особенно на участке разведения боевых элементов) и создания момента стабилизирующих сил по углу вращения, применяют более сложные алгоритмы ПК.
__________________________________________________________________
2. Организация взаимодействия СБС и СУС.
Сформированные в БВУ управляющие сигналы sI-III и sII-IV подаются на рулевые приводы РПР и РПТ, расположенные обычно в основной и боковой плоскостях симметрии ракеты. С помощью рулевых приводов приводятся в действие управляющие органы ракеты, создающие моменты стабилизирующих сил относительно корпуса ракеты, например, путем отклонений на углы dI-III и dII-IV у поворотных камер рулевого двигателя ракеты. В качестве управляющих органов могут также применяться аэродинимаческие и газодинамические рули, форсунки вдува газа в закритическую часть сопла маршевого двигателя, рулевые сопла и т. д.
Моменты стабилизирующих сил, создаваемые управляющими органами ракеты, обеспечивают не только ликвидацию угловых рассогласований Du, Dy и Dj, но и стабилизацию движения центра масс ракеты относительно плоскости стрельбы. Это происходит следующим образом (рис.4).
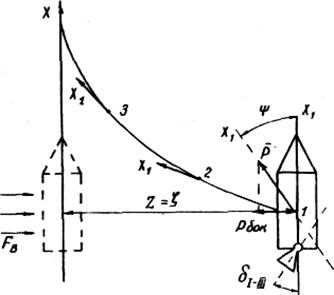
Рис.4. Взаимодействие СУС и СБС
Предположим, что порывом ветра (сила FB) ракету снесло от плоскости стрельбы на расстояние Z. Необходимо вернуть ее на расчетную траекторию. С этой целью к корпусу ракеты должна быть приложена сила, противоположная по направлению силе ветра. В идеальном случае эта сила может воздействовать на корпус таким образом, чтобы ракета возвращалась в плоскость стрельбы без разворота вокруг центра масс. Для этого можно, например, расположить по оси Z, связанной СК реактивное сопло, создающее силу тяги, направленную в сторону, противоположную действию силы ветра. Однако такой способ управления движением центра масс не нашел применения из-за многочисленных трудностей, связанных с его технической реализацией. Поэтому на всех ракетах движением центра масс управляют путем изменения углового положения ракеты. Сигнал на изменение углового положения sz вырабатывается в БВУ на основе информации с боковой скорости ![]() и боковой координате
и боковой координате ![]() , полученной в результате двойного интегрирования выходных сигналов акселерометра Аg Под действием сигнала sz управляющий орган ракеты (поворотная камера маршевого двигателя на рис.4) отклоняется на определенный угол, вызывая изменение направления силы тяги Р относительно корпуса ракеты. Под действием созданного таким способом момента управляющих сил ракета начинает разворачиваться вокруг центра масс в направлении плоскости стрельбы. Ее продольная ось занимает новое положение, обозначенное пунктирной линией на рис.4. В результате разворота ракеты на угол y, во-первых, появляется боковая составляющая сила тяги Рбok, под действием которой начинает уменьшаться расстояние Z, во-вторых, БВУ начинает формировать (на основе информации, поступающей с датчика команд ДКy) дополнительный сигнал управления sy, который стремится повернуть управляющий орган ракеты в направлении, обеспечивающем уменьшение угла рыскания y, т. е. в обратную сторону. Таким образом, в процессе возврата ракеты в плоскость стрельбы управляющий орган перемещается под действием разностного сигнала
, полученной в результате двойного интегрирования выходных сигналов акселерометра Аg Под действием сигнала sz управляющий орган ракеты (поворотная камера маршевого двигателя на рис.4) отклоняется на определенный угол, вызывая изменение направления силы тяги Р относительно корпуса ракеты. Под действием созданного таким способом момента управляющих сил ракета начинает разворачиваться вокруг центра масс в направлении плоскости стрельбы. Ее продольная ось занимает новое положение, обозначенное пунктирной линией на рис.4. В результате разворота ракеты на угол y, во-первых, появляется боковая составляющая сила тяги Рбok, под действием которой начинает уменьшаться расстояние Z, во-вторых, БВУ начинает формировать (на основе информации, поступающей с датчика команд ДКy) дополнительный сигнал управления sy, который стремится повернуть управляющий орган ракеты в направлении, обеспечивающем уменьшение угла рыскания y, т. е. в обратную сторону. Таким образом, в процессе возврата ракеты в плоскость стрельбы управляющий орган перемещается под действием разностного сигнала
 .
.
В точке 2 сигналы sy и sz могут быть равны, т. е. управляющие органы ракеты находятся в нейтральном положении, но так как вектор силы тяги уже развернут вместе с корпусом ракеты, то она продолжает двигаться к плоскости стрельбы.
При дальнейшем движении ракеты рассогласование z уменьшается, что приводит к уменьшению составляющей сигнала управления sz. Следовательно, угол y, являющийся для большого контура системы стабилизации управляющим воздействием, также уменьшается, что приводит к уменьшению величины боковой составляющей силы тяжести Рбok. Одновременно из-за уменьшения угла y становится меньше и составляющая управляющего сигнала sy в малом контуре, что приводит к дополнительному уменьшению угла рыскания y. В результате такого взаимодействия внутреннего и внешнего контуров системы стабилизации ракета возвращается в плоскость стрельбы по пологой траектории. Таким образом, взаимодействие внутреннего и внешнего контуров обеспечивает стабилизацию движения центра масс ракеты в боковой плоскости, причем малый контур (СУС) выполняет роль управляющего органа в большом контуре (СБС).
3. Цифровой автомат угловой стабилизации ракеты.
По традиции, оставшейся от той поры, когда системы, входящие в состав АСУр, состояли из отдельных приборов, выполняющих определенные функции в составе только одной системы, автомат стабилизации как управляющее устройство системы стабилизации движения современной РСН часто представляют состоящим из автомата угловой стабилизации (АУС) и автомата боковой стабилизации (АБС).
Автоматом угловой стабилизации называют совокупность ТГС с датчиками команд, бортового вычислительного устройства и рулевых приводов с управляющими органами. АУС, в котором в качестве БВУ применяется БЦВМ с необходимыми дополнительными устройствами, называют цифровым автоматом угловой стабилизации (ЦАУС). ЦАУС обеспечивает устойчивую отработку программ углового движения ракеты.
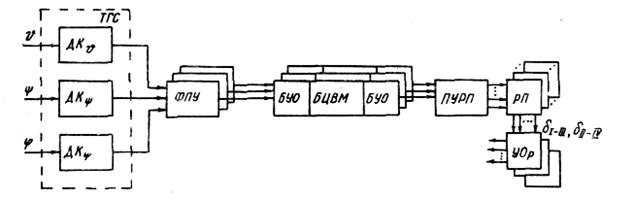
Рис. 5. Структурная схема ЦАУС
ТГС с датчиками команд (рис.5) является измерительным устройством ЦАУС. В качестве датчиков в современных АСУр применяются различные типы индукционных функциональных преобразователей, например, индукционный редуктосин (ИР). Конструкция ИР содержит зубчатый ротор и статор, на котором находятся обмотка возбуждения, запитываемая переменным синусоидальным напряжением стабильной частоты (обычно около 1000 Гц) и две выходные обмотки - синусная и косинусная.
Например, в процессе работы ЦАУС сигналы в выходных обмотках ДКy могут быть представлены в виде:
где us, uc - мгновенные значения напряжений в синусной и косинусной обмотках; k - коэффициент трансформации ИР; р- коэффициент электрической редукции; ![]() - круговая частота питающего напряжения;
- круговая частота питающего напряжения; ![]() - огибающие выходных сигналов.
- огибающие выходных сигналов.
Коэффициент электрической редукции р равен числу зубцов в роторе ИР и показывает, сколько периодов изменения огибающей выходного сигнала содержится в полном обороте ротора ИР относительно статора. Применение электрической редукции позволяет измерять угловое положение с ошибкой не более 30".
Таким образом, информация об угловом положении ракеты содержится в огибающих сигналов переменного синусоидального тока, пропорциональных синусам и косинусам измеряемых углов (с учетом электрической редукции), формирующихся в выходных обмотках датчиков команд.
Информация с датчиков команд поступает в фазовые преобразователи углов (ФПУ).
ФПУ обеспечивает в каждом цикле преобразования формирование интервалов времени, пропорциональных измеренному углу.
В БУО старт-импульсом открывается вход двоичного счетчика, который заполняется импульсами высокой и стабильной частоты от кварцевого генератора. Стоп-импульс прекращает заполнение счетчика. Сформированный таким способом цифровой двоичный код, пропорциональный измеренному углу, по сигналу опроса с БЦВМ переписывается в ячейку ОЗУ для использования в алгоритмах стабилизации.
Совокупность датчиков команд, ФПУ и элементов БУО, участвующих в преобразовании информации с ФПУ в двоичный код, называют обычно преобразователем "угол – фаза - временной интервал - код" или просто "угол-код".
БЦВМ в составе ЦАУС предназначена для реализации алгоритмов угловой стабилизации и преобразования координат на основе информации, получаемой от датчиков команд и сформированной алгоритмами системы наведения ракеты. В состав алгоритмов угловой стабилизации входят алгоритмы формирования рассогласований Du, Dy и Dj, а также алгоритмы формирования управляющих сигналов sр, sт и sв.
Необходимо заметить, что при проектировании ЦАУС проблема выбора структуры и параметров алгоритмов формирования управляющих сигналов sр, sт и sв представленных в виде дискретных разностных уравнений, является одной из центральных, поскольку неудачное решение этой проблемы может привести к потере ракетой устойчивости в ее угловом движении и невыполнению боевой задачи.
Период дискретности T0 обычно является кратным базовому циклу БЦВМ и определяет частоту повторяемости вычислений по алгоритму ЦАУС.
Код управляющего сигнала по углу рыскания, сформированный в соответствии с алгоритмом ЦАУС, алгебраически суммируется с кодом сигнала управления СБС, после чего производится обработка кодов управляющих сигналов sр, sт и sв алгоритмами преобразования координат. Окончательно сформированные коды sI-III и sII-IV сигналов управления рулевыми приводами поступают на выходные преобразователи БУО. В БУО коды сигналов управления могут преобразовываться либо в одинаковые по высоте импульсы тока, ширина которых соответствует значению кода сигнала управления в очередном цикле преобразования, либо в импульсы малой длительности (унитарный код), число которых за цикл преобразовакия соответствует значению кода сигнала управления
ПУРП (прибор управления рулевыми приводами) является согласующим устройством между БЦВМ с ВУО и РП. При использовании в составе ЦАУС непрерывных РП с внешней ООС ПУРП обеспечивает дополнительное преобразование сигналов управления из БЦВМ в форму, удобную для РП, а также усиление этих сигналов по мощности.
РП предназначен для преобразования сигнала управления в перемещение управляющего органа ракеты. В качестве РП используется следящая система, основными элементами которой являются усилитель мощности (УМ), рулевая машина (РМ) и элементы отрицательной обратной связи (ООС).
РМ является основным силовым элементом РП, обеспечивающим преобразование маломощного электрического сигнала в перемещение управляющего органа ракеты. В зависимости от способа преобразования электрической энергии в механическую, различают гидравлические, электрогидравлические и электрические РМ.
4. Цифровой автомат боковой стабилизации ракеты.
Совокупность ТГС с акселерометрами по g - направлению, БВУ и РП с УО называют иногда автоматом боковой стабилизации ракеты. АБС, где в качестве БВУ применяется БЦВМ с необходимыми вспомогательными устройствами, называют цифровым автоматом боковой стабилизации (ЦАБС). ЦАБС обеспечивает сведение к минимуму отклонения центра масс ракеты в боковом направлении.

Рис.6. Структурно-алгоритмическая схема ЦАБС
Акселерометр Аg, состоящий из ИПГ и преобразователя "напряжение-частота импульсов" (рис.6), формирует в процессе работы ЦАБС импульсы, частота следования которых fa пропорциональна кажущемуся ускорению ракеты в g - направлении, которое с точностью до ошибок выставки платформы ТГС в исходное положение перед пуском ракеты и удержания ее в этом положении во время полета на АУТ может совпадать с направлением оси z геоцентрической инерци-альной СК Oxhz (или направлением оси Z стартовой СК в момент пуска ракеты), т. е. ![]() .
.
В БУО с помощью преобразователя "частота-код" (Ч-К) на основе двоичного счетчика формируются двоичные числа, пропорциональные приращениям кажущейся скорости движения ракеты DWg за цикл преобразования. Суммирование этих приращений в БЦВМ позволяет получать информацию о текущем значении скорости ракеты в боковом направлении Wg @![]() (при допущении о малости проекции вектора g на ось z).
(при допущении о малости проекции вектора g на ось z).
БЦВМ в составе ЦАБС формирует двоичный код sz* управляющего сигнала из двоичных кодов значений боковой координаты и боковой скорости ракеты.
Выбор вида алгоритмов определяется требуемой точностью получения информации о боковом отклонении ракеты.
Вычисляемый управляющий сигнал ЦАБС sz складывается в БЦВМ алгебраически с управляющим сигналом sy канала рыскания СУС, и результирующий сигнал управления sр обрабатывается алгоритмом ПК для правильного распределения по рулевым приводам ракеты.
