Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Научно-практическая конференция учащихся и педагогов города Брянска «Первые шаги в науку»
«Нахождение центра масс полуцилиндра. Экспериментальная проверка вычислений».
Предметная область: физика и математика
Выполнил: Дудка Максим, 11 кл.
Научный руководитель:
МБОУ «Лицей №6» г. Курска
Среди задач, в которых рассматривается движение механических систем (то есть отдельного твердого тела или системы тел), по конечной цели или же цели на первом этапе решения можно выделить несколько основных типов:
1. Задачи на определение изменения линейных или угловых скоростей при перемещении тела или тел системы под действие внешних сил.
2. Задачи на определение линейных или угловых ускорений тел при их движении.
3. Задачи на определение сил реакций внешних и внутренних связей системы тел при их движении или равновесии.
В теории сначала рассматривается применение для решения задач общих теорем динамики механических систем. Начнем с первой из них.
На ее основании записываются дифференциальные уравнения поступательного движения твердого тела и дифференциальные уравнения движения центра масс системы.
С их помощью решаются всего два варианта задач - задачи на определение реакций внешних связей системы, движение которой известно, и задачи на определение уравнений движения или конечного перемещения системы тел в условиях, когда выполняется закон сохранения положения центра масс.
Начнем с последних. Это задачи на понимание сути закона сохранения. И решаются они практически мгновенно. Например, «Определить перемещение неподвижной вначале лодки весом Р при относительном перемещении в ней человека Q на расстояние S1. Сопротивлением воды движению лодки пренебречь.»
Рассмотрим теорию определения центра масс тела и системы тел.
Бросим палку так, чтобы в полете она вращалась в вертикальной плоскости. Если палка однородная, то можно заметить, что точка, находящаяся в центре палки, движется по плавной линии – такой, по которой летел бы брошенный камень, сама же палка вращается вокруг этой точки (рисунок 1). Прикрепим к одному из концов палки груз и снова ее бросим таким же образом. Движение будет похожим, однако точка, движущаяся по плавной кривой, оказывается не в центре палки, а ближе к грузу (рисунок 2).
Из этого примера можно сделать вывод, что существует такая точка тела, которая движется так, как будто на нее действуют только внешние силы, причем ее положение зависит от того, как распределена масса внутри тела. Такую точку назовем центром масс тела.
Пусть система состоит из двух материальных точек массами m1 и m2. Разумно предположить, что центр масс расположен на отрезке прямой, соединяющей эти точки, и находится ближе к точке с большей массой. Наиболее простым будет предположение, что расстояния L1 и L2 от соответствующих точек до центра масс обратно пропорциональны массам этих точек, т. е:
 (1)
(1)
Пусть L1 и L2 – векторы, проведенные от точек к центру масс; r1 и r2 – радиусы-векторы точек, а rC – радиус-вектор, проведенный из начала координат к центру масс этих двух точек. Тогда, как видно из рисунка 3
 (2)
(2)
Умножив обе части первого уравнения на m1 а второго на r2, сложим их. В результате получится:
![]()
 Но из рисунка 3 и формулы (1) следует, что
Но из рисунка 3 и формулы (1) следует, что
Таким образом, для системы, состоящей из двух точек, положение центра масс определяется радиусом-вектором
 (3)
(3)
Обобщим это соотношение на случай системы из произвольного числа материальных точек. В частности, этой системой может быть твердое тело. Если массу отдельного i-ro элемента (материальной точки) обозначить через ∆mi, а радиус-вектор через гi, то положение центра масс будет определяться по формуле:
где m = Σ∆mi; — суммарная масса системы.
Как и любое векторное соотношение, формула (3) представляет собой компактную запись трех независимых выражений, определяющих координаты центра масс:

Здесь xi, yi, zi — координаты одного из элементов тела (рисунок 4).
Центр масс всех однородных тел, имеющих центр симметрии, совпадает с этим центром. Так, центр масс однородного шара совпадает с его центром. Центр масс параллелепипеда находится в его центре симметрии; центр масс однородного стержня находится в его середине. А центр масс полуцилиндра?
В работе решена задача на интегрирование по нахождению центра масс однородного полуцилиндра и проведена экспериментальная проверка вычислений.
Расположим систему координат так, как это показано на рисунке 5. Очевидно, что центр масс полуцилиндра лежит на оси y. Разобьем полуцилиндр на горизонтальные элементы. Масса элемента толщиной dy пропорциональна его площади
![]() .
.
Здесь r - поверхностная плотность полуцилиндра. Центр масс элемента лежит на высоте y. Координата центра масс – Y всего полуцилиндра определяется интегралом
 .
.
![]() - площадь полуцилиндра. После вычисления интеграла получаем
- площадь полуцилиндра. После вычисления интеграла получаем
 .
.
![]() . (4)
. (4)
Экспериментальная проверка.
Метод 1. Экспериментально определить положение центра масс можно элементарным методом «свешивания».
Полуцилиндр кладут на край линейки так, как это показано на рисунке 6 (плоская грань перпендикулярна линейке). Осторожно перемещают полуцилиндр к краю линейки. Расстояние плоской грани от края линейки в момент опрокидывания и определяет координату цента масс.
Метод 2. Полуцилиндр выпуклой поверхностью ставят на наклонную (рисунок 7) плоскость и измеряют (можно транспортиром) углы наклона наклонной плоскости и верхней грани полуцилиндра. Координату центра масс вычисляют по формуле
 . (5)
. (5)
Формула (5) легко доказывается из геометрии равновесия полуцилиндра. На наклонной плоскости(рисунок 8) полуцилиндр находится в равновесии под действием двух сил: силы тяжести ![]() и силы реакции опоры
и силы реакции опоры ![]() . Последнюю можно разложить на две составляющие: силу трения, касательную к поверхности полуцилиндра и «нормальную» реакцию. Отметим, что вектор силы тяжести проходит через точку касания полуцилиндра и наклонной плоскости (точку К). из прямоугольных треугольников OBC и OBK легко найти соотношение
. Последнюю можно разложить на две составляющие: силу трения, касательную к поверхности полуцилиндра и «нормальную» реакцию. Отметим, что вектор силы тяжести проходит через точку касания полуцилиндра и наклонной плоскости (точку К). из прямоугольных треугольников OBC и OBK легко найти соотношение  .
.
Что и следовало доказать.
Для эксперимента был использован полуцилиндр из набора по оптике. Первый элементарный метод дал следующий результат
![]()
Измерения были проведены линейкой с точностью до 0,5 мм. Относительная ошибка отношения Y/R
![]() .
.
Абсолютная ошибка
![]() .
.
Окончательный результат первого метода
![]() .
.
Для измерения координаты центра масс вторым методом были использованы: наклонная плоскость – полоска стекла длиной » 30 см (для увеличения коэффициента трения на стекло был положен лист бумаги), два кубика (один для установки наклонной плоскости, другой используется для удобного измерения высот), нить, линейка. Полуцилиндр устанавливается на наклонной плоскости по нити. Один конец нити подкладывается под нижний конец наклонной плоскости. Перемещая полуцилиндр вдоль наклонной плоскости и изменяя угол наклона нити добиваются совмещения верхней грани полуцилиндра и линии натяжения нити. Второй кубик подставляется к наклонной плоскости. На нем отмечают высоту наклонной плоскости и «высоту» натянутой линии.
Экспериментальная таблица.
h1, см | h2, см | s, см | Sin(a) | Sin(b) |
|
4,1 | 10,15 | 36,25 | 0,11239 | 0,26963 | 0,4168190 |
Измерения длин были проведены с точностью до 0,5 мм. относительная ошибка отношения Y/R должна определятся в соответствии с формулой
 .
.
Формула сложная, и ошибку имеет смысл оценить приближенно. Так как высоты в 3-9 раз меньше основания s, то искомое отношение можно записать приближенно
![]() .
.
В соответствии с приближенной формулой относительная ошибка определяется относительными ошибками высот.
![]() .
.
Абсолютная ошибка.
![]() .
.
Окончательно результат второго метода записывается в виде
![]() .
.
Проведем эксперимент по нахождению центра масс тела геометрически неправильной формы (рисунок 9).
 (6)
(6)
 (7)
(7)
 (8)
(8)
![]() (9)
(9)
Теоретические расчеты с использованием математические приемов полностью подтверждаются экспериментальными измерениями. В случае правильных геометрических форм удобной использовать теоретический метод. Если же форма неправильная и нельзя проследить закономерность в изменении её массы, то тогда пользуемся экспериментальным методом (рисунок 10).

Формула (6) несправедлива для тела геометрически неправильной формы. Аналогично первому случаю проводим расчеты. Получаем в результате формулу (9).
ЛИТЕРАТУРА
1. Суслов механика, М., «Гостехиздат», 1946
2. Теоретическая механика, тт.1, 2. М., «Физматгиз», 1960
3. Четаев механика. М., «Наука», 1987
4. Маркеев механика. М., «Наука», 1999
5. Голубев теоретической механики. М., Изд-во Моск. Ун-та. 2000
6. Журавлев теоретической механики. М., «Наука», 2001
7. Власов практикум, 2000
8. Физическая олимпиада: экспериментальный тур, http://belpho. org/books/slobodianiuk_experimental_tour. pdf
Приложение.
Рис. 1 
Рис. 2 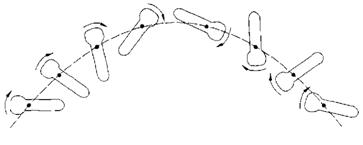
Рис. 3 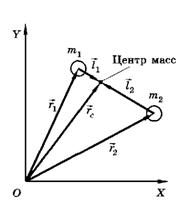
Рис. 4 
Рис. 5 
Рис. 6 
Рис. 7 
Рис. 8 
Рис. 9 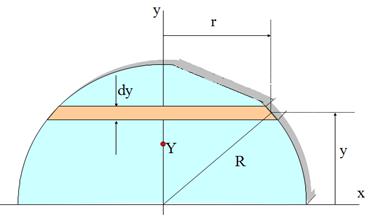
Рис. 10