
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ОПТИМАЛЬНЫЙ ВЫБОР КОНЕЧНО-ЭЛЕМЕНТНОЙ МОДЕЛИ ДЛЯ ИССЛЕДОВАНИЯ НАПРЯЖЕННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ
, аспирант ИжГТУ, , аспирант ИжГТУ.
*****@***net
Abstract: Дан сравнительный анализ вычислительной эффективности конечно-элементного моделирования напряженно-деформированного состояния (НДС) на различных типах элементов применительно к исследованию зуба цилиндрической передачи.
Численное моделирование НДС позволяет предсказать прочностные характеристики передачи и выявить уже на стадии проектирования ее слабые места. Метод конечных элементов упрощает физическую модель упругого тела, подразумевая, что решение принадлежит определенному конечномерному классу функций. Если истинное решение не принадлежит этому классу, то результат моделирования не будет адекватно отражать реальный процесс. Практически это означает, что полученные перемещения, а, следовательно, и напряжения будут в целом заниженными [1]. В некоторых точках полученные напряжения могут быть завышенными. При расчете напряженно-деформированного состояния конструкций нужно быть готовыми получить ошибку в несколько раз превышающую результат [2].
Еще десять лет назад персональные компьютеры имели оперативную память не больше нескольких мегабайт, поэтому когда говорили о конечно-элементной модели, то подразумевали двумерную триангуляцию области. Использование трехмерных элементов высоких порядков с несколькими десятками узлов представлялось возможным, только если тело удавалось представить в виде одного или небольшого числа элементов. Исследовать точность полученных результатов и, следовательно, оценить их эффективность не представлялось возможным.
В настоящее время несколько сот мегабайт оперативной памяти на персональном компьютере стало обыденностью. Появилась возможность не только выбирать тип элемента, но оценить эффективность различных типов элементов для решения конкретных задач.
В качестве исследуемого объекта был выбран зуб цилиндрического колеса.

Рис.1. Зуб цилиндрического колеса.
Исходное тело разбито на десять криволинейных конечных элементов (рис.1). На головку зуба приходится шесть элементов, по два элемента - на переходную часть и на тело колеса. На средний левый элемент головки зуба действует распределенная по поверхности нагрузка, приложенная по нормали к поверхности (рис.1).
Точность результатов моделирования будем исследовать по сходимости решения. Для этого каждый из исходных десяти элементов разбивается на восемь (рис.2) и находится решение уже на новом, измельченном разбиении.
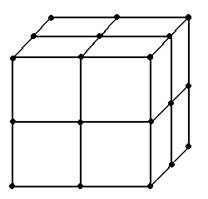
Рис.2. Схема разбиения для измельчения сетки.
Сходимость решения оценивается по интегральной норме разницы полученных перемещений ![]() и
и ![]() :
:
![]() где
где![]() , i=1,2…m – множество элементов разбиения
, i=1,2…m – множество элементов разбиения
 ,
,  ,.
,.
.
Сравнительный анализ вычислительной эффективности производился на пяти различных типах элементов [3, 4]:
1. 8-узловой с перемещениями в узлах (Лагранжевый)
2. 8-узловой с перемещениями и деформациями в узлах (Эрмитовый)
3. 27-узловой с перемещениями в узлах (Лагранжевый)
4. 27-узловой с перемещениями и деформациями в узлах (Эрмитовый)
5. 64-узловой с перемещениями в узлах (Лагранжевый)
Результаты точности и ресурсоемкости приведены в тамлице:
Тип элемента | Количество элементов | Размерность матрицы МКЭ | Половина ширины ленты матрицы МКЭ | Требуемая оперативная память в байтах | Точность |
1 | 640 | 2700 | 165 | 1.782.000 | 0,180 |
1 | 5120 | 18360 | 513 | 37.674.720 | 0,095 |
2 | 80 | 1842 | 285 | 2.099.880 | 0,071 |
2 | 640 | 10935 | 782 | 34.204.680 | 0,023 |
3 | 80 | 2700 | 369 | 3.985.200 | 0,142 |
3 | 640 | 18360 | 1088 | 79.900.320 | 0,049 |
4 | 80 | 10935 | 1583 | 69.240.420 | 0,013 |
5 | 80 | 8190 | 1118 | 36.625.680 | 0,044 |
Предполагая, что для каждого типа элементов точность связана с потребляемой памятью соотношением ![]() , где p – память в тысячах чисел с плавающей точкой (4000 байт), e – погрешность, B и C некоторые константы, то для первых трех типов элементов можно построить графики интерполяции погрешности (рис. 3). По горизонтальной оси отложена память в мегабайтах, по вертикальной оси - погрешность моделирования.
, где p – память в тысячах чисел с плавающей точкой (4000 байт), e – погрешность, B и C некоторые константы, то для первых трех типов элементов можно построить графики интерполяции погрешности (рис. 3). По горизонтальной оси отложена память в мегабайтах, по вертикальной оси - погрешность моделирования.
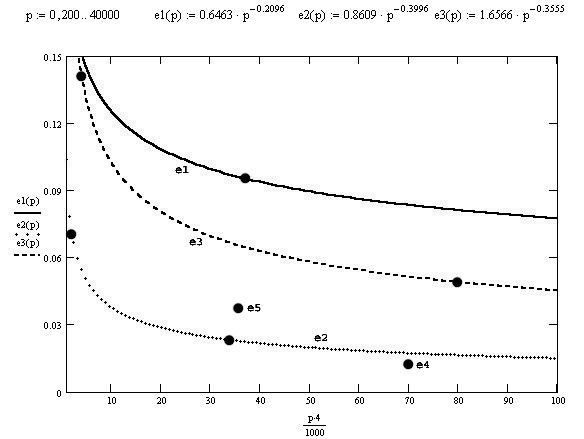
Рис. 3. Графики вычислительной эфективности.
Из рис.3 видно, что первый тип элементов наиболее неэффективно использует оперативную память, четвертый тип наиболее эффективно использует оперативную память для достижения заданной точности.
То есть элементы, у которых в узлах заданы, кроме перемещений, деформации (Эрмитовы) более эффективны с точки зрения вычислительной ресурсоемкости для достижения заданной точности, чем элементы, в узлах которых заданы лишь перемещения (Лагранжевы). При этом большее число узлов у элемента делает его более эффективным в своей категории.
Необходимо отметить, что напряжения линейно зависят от деформаций - производных перемещений, поэтому погрешность найденного поля напряжений будет на порядок выше, чем погрешность поля перемещений. Поэтому для моделирования НДС с погрешностью не более 20% точность результатов перемещений должна быть на порядок выше, то есть не более 2%. Для достижения такой точности на элементах первого типа необходимо несколько сот гигабайт оперативной памяти. Это видно, если продолжить график e1(p) (рис. 3). Используя элементы второго и четвертого типов (Эрмитовы), такую точность реально достичь на любом современном персональном компьютере.
Чем объясняется эффективность использованных типов элементов? При использовании элементов первого типа найденное поле перемещений является непрерывным, но производная на границах элементов имеет разрыв первого рода. Поэтому гладкость поля напряжений отсутствует (рис. 4). На практике используются методы вычисления усредненных значений во внутренних точках элементов и сглаживания напряжений от элемента к элементу, поэтому визуальное распределение поля напряжений получается гладким и, в среднем, более точным. При использовании элементов второго типа напряжения в узлах двух соседних элементов получаются равными, и хотя вдоль границ элементов они различаются, в результате мы имеем более гладкое и точное поле напряжений (рис 5). Если добавить число узлов на границе, то поле напряжений получается еще более ровным, как у 27-узлового Эрмитового элемента (рис 7). Именно этот тип и оказался самым эффективным из рассмотренных.
С теоретической точки зрения, чем выше порядок гладкости пространства, в котором мы ищем решение, тем выше скорость сходимости метода. То есть чем более гладкое получаемое поле напряжений, тем быстрее мы получим точное решение, тем эффективнее выбранный тип элемента.
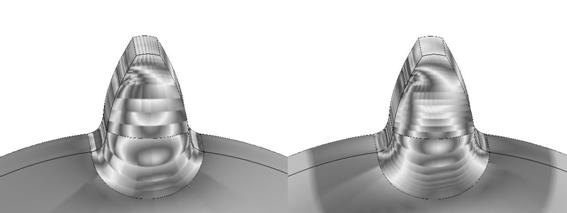
Рис. 4. Результат моделирования НДС на элементах первого типа (640, 5120 элементов).
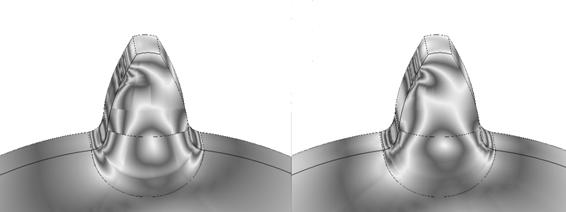
Рис. 5. Результат моделирования НДС на элементах второго типа (80, 640 элементов).
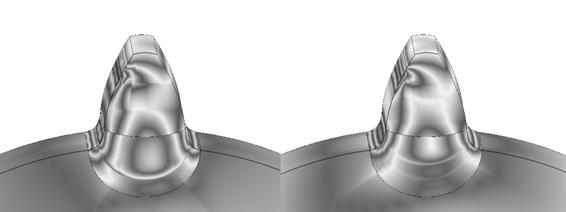
Рис. 6. Результат моделирования НДС на элементах третьего типа (80, 640 элементов).
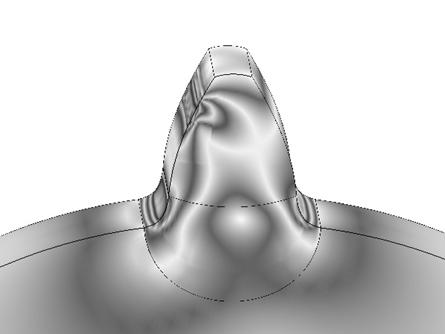
Рис. 7. Результат моделирования НДС на элементах четвертого типа (80 элементов).
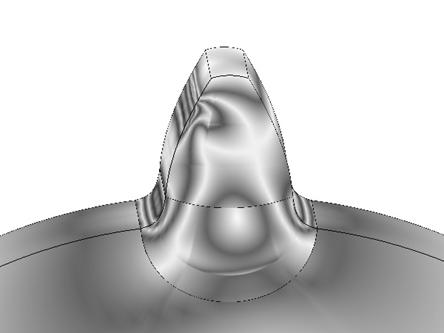
Рис. 8. Результат моделирования НДС на элементах пятого типа (80 элементов).
Литература:
Метод конечных элементов в технике – М.: Мир, 1975. – 541 с.
Дыченко A. Анализ напряженно-деформированного состояния конструкций программными продуктами САПР. - "САПР и графика", 2002 ‘10.
, , Мирошниченко сплайн-функций. - М.: Наука, 19с.
Конечные элементы и аппроксимация. - М.: Мир, 19с.
