


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Процессоры SuperSPARC
Процессор SuperSPARC (один из первых процессоров серии SPARC) компании Texas Instruments стал основой серии рабочих станций и серверов SPARCstation/SPARCserver 10 и SPARCstation/SPARCserver 20. Имеется несколько версий этого процессора, позволяющего в зависимости от смеси команд обрабатывать до трех команд за один машинный такт, отличающихся тактовой частотой. Процессор SuperSPARC (рис. 2.7) имеет сбалансированную производительность на операциях с фиксированной и плавающей точкой. Он имеет внутренний кэш емкостью 36 Кб (20 Кб - кэш команд и 16 Кб - кэш данных), раздельные конвейеры целочисленной и вещественной арифметики и при тактовой частоте 75 МГц обеспечивает производительность около 205 MIPS (миллион команд в секунду). Для сравнения: Intel Pentium 66 МГц обеспечивает производительность 112 MIPS.
Развитием SPARC-процессоров стали процессоры hyperSPARC, 64-битовые процессоры UltraSPARC I, UltraSPARC II и т. д.
Процессоры HyperSPARC
Одной из главных задач, стоявших перед разработчиками микропроцессора hyperSPARC, было повышение производительности, особенно при выполнении операций с плавающей точкой. Поэтому особое внимание разработчиков было уделено созданию простых и сбалансированных шестиступенчатых конвейеров целочисленной арифметики и плавающей точки. Логические схемы этих конвейеров тщательно разрабатывались, количество логических уровней вентилей между ступенями выравнивалось, чтобы упростить вопросы дальнейшего повышения тактовой частоты.
Производительность процессоров hyperSPARC может меняться независимо от скорости работы внешней шины (MBus). Набор кристаллов hyperSPARC обеспечивает как синхронные, так и асинхронные операции с помощью специальной логики кристалла RT625. Отделение внутренней шины процессора от внешней шины позволяет увеличивать тактовую частоту процессора независимо от частоты работы подсистем памяти и ввода/вывода. Это обеспечивает более длительный жизненный цикл, поскольку переход на более производительные модули hyperSPARC не требует переделки всей системы.
Процессор hyperSPARC реализован в виде многокристальной микросборки (рис. 2.8), в состав которой входит суперскалярная конвейерная часть и тесно связанная с ней кэш-память второго уровня. В набор кристаллов входят RT620 (CPU) - центральный процессор, RT625 (CMTU) - контроллер кэш-памяти, устройство управления памятью и устройство тегов и четыре RT627 (CDU) кэш-память данных для реализации кэш-памяти второго уровня емкостью 256 Кбайт. RT625 обеспечивает также интерфейс с MBus.
|
Рис. 2.7. Блок схема процессора Super SPARC |
|
Рис. 2.8. Набор кристаллов процессора hyperSPARC |
Центральный процессор RT620 (рис. 2.9) состоит из целочисленного устройства, устройства с плавающей точкой, устройства загрузки/записи, устройства переходов и двухканальной множественно-ассоциативной памяти команд емкостью 8 Кбайт. Целочисленное устройство включает АЛУ и отдельный тракт данных для операций загрузки/записи, которые представляют собой два из четырех исполнительных устройств процессора. Устройство переходов обрабатывает команды передачи управления, а устройство плавающей точки, реально состоит из двух независимых конвейеров - сложения и умножения чисел с плавающей точкой. Для увеличения пропускной способности процессора команды плавающей точки, проходя через целочисленный конвейер, поступают в очередь, где они ожидают запуска в одном из конвейеров плавающей точки. В каждом такте выбираются две команды. В общем случае, до тех пор, пока эти две команды требуют для своего выполнения различных исполнительных устройств при отсутствии зависимостей по данным, они могут запускаться одновременно. RT620 содержит два регистровых файла: 136 целочисленных регистров, сконфигурированных в виде восьми регистровых окон, и 32 отдельных регистра плавающей точки, расположенных в устройстве плавающей точки.
|
Рис. 2.9. Процессор RТ 620 |

Кэш-память второго уровня в процессоре hyperSPARC строится на базе RT625 CMTU, который представляет собой комбинированный кристалл, включающий контроллер кэш-памяти и устройство управления памятью, которое поддерживает разделяемую внешнюю память и симметричную многопроцессорную обработку.
RT627 представляет собой статическую память 16К, специально разработанную для удовлетворения требований hyperSPARC. Она организована как четырехканальная статическая память в виде четырех массивов с логикой побайтной записи и входными и выходными регистрами-защелками. RT627 для ЦП является кэш-памятью с нулевым состоянием ожидания без потерь (т. е. приостановок) на конвейеризацию для всех операций загрузки и записи, которые попадают в кэш-память.
Команды загрузки и записи одновременно генерируют два обращения: одно к кэш-памяти команд первого уровня емкостью 8 Кбайт и другое к кэш-памяти второго уровня. Если адрес команды найден в кэш-памяти первого уровня, то обращение к кэш-памяти второго уровня отменяется и команда становится доступной на стадии декодирования конвейера. Если же во внутренней кэш-памяти произошел промах, а в кэш-памяти второго уровня обнаружено попадание, то команда станет доступной с потерей одного такта, который встроен в конвейер. Такая возможность позволяет конвейеру продолжать непрерывную работу до тех пор, пока имеют место попадания в кэш-память либо первого, либо второго уровня, которые составляют 90% и 98% соответственно для типовых прикладных задач рабочей станции.
Существуют также недорогие варианты SPARC-процессоров, например, MicroSPARC-II, основное назначение которого - однопроцессорные низкостоимостные системы.
4 тема. Организации ввода –вывода. Вычислительные комплексы.
Организации ввода –вывода. Интерфейсы, шины расширения ввода-вывода. Способы обмена информацией. Интерфейсы персонального компьютера. Параллельные интерфейсы. LPT - порт. Режим обмена информацией: дуплексный, полудуплексный и симплексный. Последовательные интерфейсы. СОМ-порт. Способы последовательной передачи. Асинхронный и синхронный обмен информацией. Режимы передачи данных. Управление потом передачи. Котроллеры внешних устройств.. Порты ввода и вывода. Обмен информацией при прерываниях. Распределение системы обработки данных. Вычислительные комплексы. Классификация. Многомашинные вычислительные комплексы (системы). Организация функционирования многомашинной вычислительной системы (ММВС). Виды связей в ММВС. Мультипроцессорные компьютерные системы (МКС). Типы структурной организации и основы проектирования МКС.
Основные стадии выполнения команды. Рабочий цикл процессора
Функционирование процессоров в основном состоит из повторяющихся рабочих циклов, каждый из которых соответствует выполнению одной команды программы. Завершив рабочий цикл для текущей команды, процессор переходит к выполнению рабочего цикла для следующей команды программы.
В общем виде команды, выполняемые процессором, имеют следующий формат:
Код операции | Адресный код |
В зависимости от того, сколько полей содержит адресный код различают команды: безадресные, одноадресные, двухадресные и т. д.
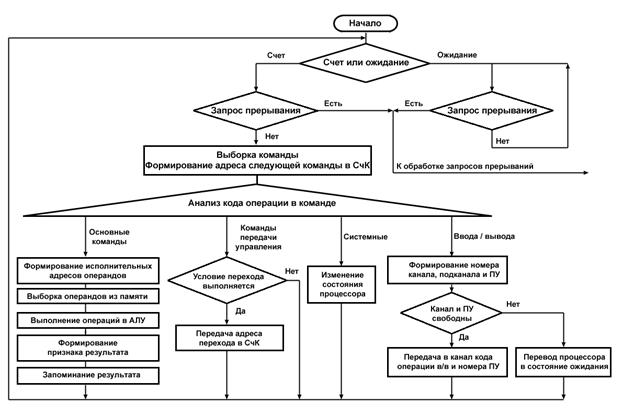
Схема рабочего цикла процессора представлена на рисунке.
На схеме показаны варианты рабочего цикла для четырех групп команд: основных (арифметические, логические и пересылочные операции); передачи управления; ввода-вывода; системных (устанавливающих состояние процессора, маску прерывания, слово состояния программы и др.)
Рабочий цикл начинается с распознавания состояния процессора – «счет» или «ожидание». Далее производится проверка наличия немаскированных прерываний.
В состоянии «ожидание» никакие программы не выполняются – процессор ждет поступления прерывания, после чего управление передается прерывающей программе, переводящей процессор в состояние «счет».
В состоянии «счет» при наличии немаскированных прерываний происходит выход из нормального рабочего цикла и переход к процедуре обработки запросов прерывания.
При отсутствии прерываний в состоянии «счет» последовательно выполняются этапы рабочего цикла: выборка очередной команды и определение по коду операции ее группы, подготовка операндов (формирование исполнительных адресов и выборка операндов из памяти), обработка операндов в АЛУ и запоминание результата.
На этапе выборки очередной команды образуется согласно естественному порядку адрес следующей за ней команды (продвинутый адрес), при этом счетчик команд инкрементируется.
В процессе выполнения заданной командой операции формируется признак результата операции, используемый командами условного перехода при организации ветвлений в программах.
Указанная выше последовательность составляет основной вариант рабочего цикла, реализуемый при выполнении основных команд.
При выполнении команд передачи управления проверяется заданное условие. Если условие не выполняется, то следующую команду указывает продвинутый адрес, установленный ранее в СчК. Если условие выполняется, то в СчК передается адрес, заданный командой передачи управления.
Команды ввода-вывода инициируют в канале операцию обмена информацией между ядром ЭВМ (основной памятью) и периферийным устройством.
Системные команды осуществляют переключения состояния процессора (программы) путем загрузки нового слова в регистр состояния процессора.
|
Рис. 2.13 Рабочий цикл процессора. |
Организация прерываний в ЭВМ
Во время выполнения текущей программы, внутри ЭВМ и в связанной с ней внешней среде (например, в технологическом процессе, управляемом ЭВМ) могут возникать события, требующие немедленной реакции на них со стороны ЭВМ.
Реакция состоит в том, что ЭВМ прерывает обработку текущей программы и переходит к выполнению некоторой подпрограмме, специально предназначенной для данного события. По завершении указанной подпрограммы ЭВМ возвращается к выполнению прерванной программы.
Рассматриваемый процесс, называемый прерыванием программ, поясняется на рис.2.14. Принципиально важным является то, что моменты возникновения событий, требующих прерывания программ, заранее неизвестны и поэтому не могут быть учтены при программировании.
Каждое событие, требующее прерывания, сопровождается сигналом, называемым запросами прерывания.
Возможность прерывания программ — важное архитектурное свойство ЭВМ, позволяющее эффективно использовать производительность процессора при наличии нескольких протекающих параллельно во времени процессов, требующих в произвольные моменты времени управления и обслуживания со стороны процессора. В первую очередь это относится к организации параллельной во времени работы процессора и периферийных устройств машины, а также к использованию ЭВМ для управления в реальном времени технологическими процессами.
Основными функциями системы прерывания являются:
· запоминание состояния прерываемой программы и осуществление перехода к прерывающей программе
· восстановление состояния прерванной программы и возврат к ней.
При наличии нескольких источников запросов прерывания должен быть установлен определенный порядок (дисциплина) в обслуживании поступающих запросов. Другими словами, между запросами должны быть установлены приоритетные соотношения, определяющие, какой из нескольких поступивших запросов подлежит обработке в первую очередь, и устанавливающие, имеет право или не имеет данный запрос прерывать ту или иную программу. Приоритетный выбор запроса для исполнения входит в процедуру перехода к прерывающей программе.
Вектором прерывания называется начальный адрес прерывающей программы. В общем случае, каждому запросу прерывания соответствует свой вектор прерывания, способный инициировать выполнение соответствующей прерывающей программы. Векторы прерывания обычно находятся в специально выделенных фиксированных ячейках памяти – таблице векторов прерывания.
Процедура организации перехода к прерывающей программе включает в себя выделение из выставленных запросов такого, который имеет наибольший приоритет.
Различают абсолютный и относительный приоритеты. Запрос, имеющий абсолютный приоритет, прерывает выполняемую программу и инициирует выполнение соответствующей прерывающей, программы. Запрос с относительным приоритетом является первым кандидатом на обслуживание после завершения выполнения текущей программы.
Если наиболее приоритетный из выставленных запросов прерывания не превосходит по уровню приоритета выполняемую процессором программу, то запрос прерывания игнорируется или его обслуживание откладывается до завершения выполнения текущей программы.
Простейший способ установления приоритетных соотношений между запросами (уровнями) прерывания состоит в назначении им номеров, при этом прерывания с меньшим номером обладают большим приоритетом. В этом случае приоритет является жестко фиксированным.
В ОС MS DOS и MS Windows таблица векторов прерываний занимает 1024 байта и располагается по адресу 0000h:0000h. Каждый 4-байтный элемент таблицы соответствует типу прерывания (от 0 до 0FFH) и содержит сегмент и относительный адрес обработчика прерывания данного уровня. Прерывания от 0 до 1FH (самые нижние уровни) используются как прерывания внутренней аппаратуры; MS-DOS использует прерывания от 20Н до 3FH, все остальные прерывания могут использоваться внешней аппаратурой, системными драйверами и прикладными программами.
Если контроллер прерываний или другое устройство посылает в ЦП прерывание через вывод INTR, оно должно также поместить тип прерывания в виде 8-разрядного числа (от 0 до 0FFH) на системную магистраль для передачи в ЦП. Процессор, умножив это число на 4, определяет адрес используемого вектора прерывания и перейдет на обслуживание прерывания.
Обслуживание состоит в том, что ЦП, обнаружив сигнал прерывания, помещает в машинный стек слово состояния программы (определяющее различные флаги ЦП), регистр программного сегмента (CS) и указатель команд (IP) и блокирует систему прерываний. Затем ЦП с помощью 8-разрядного числа, установленного на системной магистрали прерывающим устройством, извлекает из таблицы векторов адрес обработчика и возобновляет выполнение с этого адреса. По завершении выполнения подпрограммы обработчика прерывания, ЦП восстанавливает из стека содержимое регистров CS и IP, вследствие чего возобновляется выполнение прерванной программы.
Каналы и интерфейсы ввода вывода
Любая ВС реализуются в виде определенной совокупности конструктивно автономных, но информационно взаимосвязанных в единую систему функциональных элементов (ФЭ): различных устройств, блоков, модулей, каждый из которых полностью выполняет некоторую определенную функцию обработки информации. Для любого типа обработки информации, выполняемой в рамках любой ВС, необходимо обеспечить определенный обмен информацией между ФЭ, входящими в ее структуру. Поэтому любой ФЭ, помимо электронных узлов, реализующих его основную функцию обработки информации, должен иметь специальные электронные узлы или аппаратуру, при помощи которых организуется необходимый обмен информацией с другими ФЭ по соответствующим каналам связи (КС). Физическая среда, по которой передаются сигналы, несущие информацию, может быть различной, в частности в качестве такой среды используются различного вида кабели или линии связи (ЛС). ЛС, по которым передаются сигналы, и аппаратура передачи/приема данных образуют упомянутые выше каналы связи.
Совокупность всех, в основном унифицированных, технических (аппаратных) и программных средств, обеспечивающих информационное взаимодействие ФЭ, входящих в состав ВС, называется интерфейсом. Иначе говоря, интерфейс – это совокупность канала связи и программных средств, используемых для информационного сопряжения устройств, входящих в состав ВС.
Помимо понятий «интерфейс» и «канал связи» часто используются также такие понятия как «протокол». Протокол – это совокупность правил, определяющих взаимодействие ФЭ системы и описывающих способ выполнения определенного класса функций сопряжения, т. е. интерфейсных функций.
Для того, чтобы иметь возможность использовать в ВС различные унифицированные ФЭ в первую очередь необходимо обеспечить их совместимость с точки зрения организации процедуры обмена информацией, т. е. необходимо унифицировать аппаратные и программные средства, организующие обмен информацией между ФЭ. Совместимость унифицированных ФЭ обеспечивается, так называемыми, стандартными интерфейсами (СИ), стыками и протоколами. Последнее заставляет уделять огромное внимание интерфейсам при проектировании и использовании средств ВТ.
Внешние интерфейсы или каналы ввода-вывода это группа интерфейсов (средств сопряжения) позволяющих расширять функциональные возможности ВС, за счет подключения различного периферийного оборудования, и обеспечения коммуникации с другими компьютерами. К интерфейсам этой группы относятся LPT-, СОМ-, GAME - и MIDI-порты, шины SCSI, USB и FireWire, а также интерфейсы локальных сетей и вспомогательные интерфейсы J2С и JTAG.
1.1.5 Обзор интерфейсов ввода вывода
Основоположником группы внешних интерфейсов является последовательный интерфейс СОМ-порта RS-232C, пришедший от удаленных терминалов, и использующийся ранее даже для подключения принтеров. Впоследствии из принтерных интерфейсов последовательный RS-232C был вытеснен более производительным параллельным интерфейсом Centronics, реализуемым LPT-портом.
По мере роста разрешающей способности принтеров, расширении номенклатуры и требований устройств ввода (сканеры, дигитайзеры) и устройств с двунаправленным характером обмена (внешние диски, скоростные модемы) производительности указанных интерфейсов оказалось недостаточно. Вместе с тем оказалось, что повысить производительность внешних интерфейсов можно обратным переходам на последовательный интерфейс, который снимает проблемы изготовления многопроводных кабелей и многоконтактных соединителей с нормированными параметрами задержек сигналов. Эти предпосылки привели к появлению последовательных шин USB и FireWire, решающих многие проблемы подключения компьютерной периферии:
· преодоление ограничения производительности;
· упрощение подключений – минимизация количества и ассортимента соединительных кабелей;
· экономия ресурсов ЭВМ – адресов портов, каналов ДМА и линий запросов прерываний, необходимых для подключения традиционных адаптеров;
· полная поддержка технологии Plug and Play.
USB (Universal Serial Bus) –последовательная шина подключения внешних периферийных устройств среднего быстродействия (включая клавиатуру, мышь и другие устройства), обеспечивающая двунаправленную передачу информации. Двухпроводной интерфейс обеспечивает скорость передачи 1.5 или 12 Мбит/с. Устройства подключаются по топологии дерева, используя хабы-разветвители.
Вследствие недостаточной производительности USB для цифровой передачи живого видеоизображения, на ее базе был создана высокопроизводительная последовательная шина FireWire (IEEE 1394). Этот интерфейс с производительностью от 100 Мбит/с и выше (до 1,6 Гбит/с) предназначен для подключения дисков, стримеров, сканеров, цифровых видеоустройств и т. п.
SCSI (Small Computer System Interface, произносится «скази») – интерфейс системного уровня, стандартизованный ANSI. SCSI-шина реализуется в виде кабельного шлейфа, который допускает соединение до 8 устройств внутреннего и внешнего исполнения. К шине могут подключаться дисковые внутренние и внешние накопители (винчестеры, сменные винчестеры, CD-ROM, магнитооптические диски и др.), стримеры, сканеры и другое оборудование, требующее интенсивного обмена данными.
Интерфейс игрового адаптера (GAME-порта) отличается от описанных выше тем, что помимо вода значений дискретных (4 бита) сигналов, используется для ввода и аналоговых сигналов (величины сопротивления 4 резисторов). Изначально порт был предназначен для подключения джойстиков и других игровых устройств ввода, но может использоваться для подключения и других датчиков.
1.1.6 Характеристики современных интерфейсов ввода-вывода
По способу передачи информации интерфейсы подразделяются на параллельные и последовательные. В параллельном интерфейсе все биты передаваемого слова (обычно байта) передаются по нескольким ЛС одновременно (интерфейс Centronics – LPT-порт). В последовательном интерфейсе биты передаются друг за другом обычно по одной ЛС (интерфейс RS-232C – СОМ-порт ЭВМ).
Важным параметром интерфейсов является пропускная способность, что обусловлено ростом объемов передаваемой информации. Очевидно, что при одинаковом быстродействии приемопередающих цепей и пропускной способности ЛС по скорости передачи данных параллельный интерфейс должен превосходить последовательный. Однако повышение производительности за счет увеличения тактовой частоты передачи данных не дает желаемого эффекта, поскольку в случае параллельного интерфейса начинают проявляться такие недостатки как «перекос» сигнала, искажение уровня сигналов и т. д.
Для интерфейса, соединяющего два устройства, различают три возможных режима обмена – дуплексный, полудуплексный и симплексный. Дуплексный режим позволяет по одному каналу связи одновременно передавать информацию в обоих направлениях. Полудуплексный режим позволяет передавать информацию в противоположных направлениях поочередно. Симплексный (односторонний) режим предусматривает только одно направление передачи информации.
Другим немаловажным параметром интерфейса является допустимое удаление соединяемых устройств. Оно ограничивается как частотными свойствами кабелей, так и помехозащищенностью интерфейсов. Параллельные интерфейсы чаще накладывают более жесткие ограничения на этот параметр, например, RS-232C позволяет использовать кабели длиной в десятки метров, в то время как Centronics ограничен в длине единицами метров. Как правило, чем длиннее соединительный кабель, тем ниже предел его пропускной способности, т. е. если с длинным кабелем возникают проблемы передачи, то необходимо либо менять кабель на более качественный или (и) короткий, либо снижать физическую скорость обмена
С появлением USB и FireWire в качестве характеристики интерфейса стала фигурировать топология соединения Для интерфейсов RS-232C и Centronics практически однозначно применялась двухточечная топология PC – устройство (или PC – PC). USB и FireWire реализуют древовидную топологию, в которой внешние устройства могут быть как оконечными, так и разветвителями. Эта топология позволяет подключать множество устройств к одному порту USB или FireWire.
|
Рис. 2.15. Пример подключения устройств USB |
В таблице приведены характеристики основных внешних интерфейсов.
Интерфейс | Способ передачи | Максимальная скорость передачи | Максимальное удаление | Подключаемое оборудование |
RS-232C COM-порт | последовательный | 20 Кбит/c | 15 м | Мышь, модем |
Centronics LPT-порт | параллельный | 2 Мбайта/c | 2 м (до 10 м при использовании спец. кабеля) | Принтеры, сканеры |
Ultra SCSI | параллельный | 80 Мбайт/с | 1.5 м | накопителы, сканеры |
USB | последовательный | 12 Мбит/с | 5 м (при использовании экранированной витой пара) | |
FireWare | последовательный | 400 Мбит/с | 4.5 м | накопители, видеооборудование |
Периферийные устройства
1.1.7 Печатающие устройства (принтеры)
Все печатающие устройства можно разделить на последовательные, строчные и страничные. В каждой группе можно выделить устройства ударного (impact) и безударного (non-impact) действия. По используемой технологии печати различают матричные, струйные, лазерные и LED-принтеры, принтеры с термопереносом восковой мастики, с термосублимацией, а также с изменением фазы красителя.
Матричные принтеры
Последовательные ударные матричные печатающие устройства работают следующим образом: вертикальный ряд (или два ряда) игл «вколачивают» с ленты в бумагу, формируя последовательно символ за символом. Для этих принтеров возможно использование как форматной так и рулонной бумаги.
Головка принтера оснащается 9, 18 или 24 иголками, в последнем случае обеспечивается наилучшее для матричных принтеров качество.
Более высокое быстродействие обеспечивают построчные (постраничные) матричные принтеры, которые вместо головок используют длинные массивы с большим количеством игл, при этом достигается скорость печати до 1500 строк в минуту.
Основным достоинством матричных принтеров является низкая стоимость расходных материалов, в следствии чего себестоимость печати одного листа в несколько раз ниже, чем у лазерных или струйных моделей.
Расходным материалом в матричных принтерах является картридж с красящей лентой, при этом можно производить замену ленты без замены картриджа. Как правило одной ленты при правильной настройке узла хватает на распечатку от 500 до 1000 страниц текста.
Во всех остальных отношениях матричные принтеры хуже струйных и лазерных. Они имеют низкое графическое разрешение, печатают медленно и создают высокий уровень шума.
Струнные принтеры
Струнные принтеры относятся к безударным печатающим устройствам, то есть таким, у которых носитель печатаемой информации не касается бумаги. Струйные чернильные (Ink Jet) принтеры относятся, как правило, к классу последовательных безударных печатающих устройств, которые в свою очередь подразделяются на устройства непрерывного (continuous drop, continuous jet) и дискретного (drop-on-demand) действия. Последние в свою очередь могут использовать либо термическую «пузырьковую» технологию (bubble-jet, thermal ink-jet), либо пьезоэффект (piezo ink-jet). У чернильных устройств, как и матричных, печатающая головка движется относительно неподвижной бумаги. Сопла (канальные отверстия) на печатающей головке, через которые разбрызгиваются чернила, соответствуют «ударным» иглам. Количество сопел у разных моделей может варьироваться от 12 до 256 (иногда более). Поскольку размер каждого сопла меньше диаметра иглы (тоньше человеческого волоса), а количество сопел больше количества игл, то получаемое изображение четче (если чернила не расплываются на бумаге). Максимальная разрешающая способность массовых моделей достигает значения 1440 dpi.
Основными параметрами струйных принтеров являются технология печати, разрешение, количество цветов.
Технология печати. Под технологией печати понимается способ формирования капли чернил. В пьезоэлектрических печатающих головках (принтеры Epson) капля формируется и выстреливается за счет пьезоэффекта, в пузырьковых головках (принтеры Canon, Hewlett Packard, Lexmark) капля выстреливается за счет давления пузырька пара, возникшего при нагревании чернил. В пузырьковых печатных механизмах сопла печатающей головки изнашиваются быстрее, поэтому головка совмещена с картриджем и меняется вместе с опустевшим баллончиком чернил. Пьезоэлектрические головки обычно несменные, а замене подлежат лишь баллончики с чернилами, хотя головка тоже является расходным материалом и может быть заменена.
Разрешение. Разрешение характеризует величину самых мелких деталей изображения, передаваем при печати без искажения. Измеряется обычно в dpi (dot per inch) – число точек на дюйм. Разрешение принтера соответствует разрешению черно-белого изображения (т. е. только черно-белая картинка с разрешением 300 dpi будет напечатана на принтере с разрешением 300 dpi без искажений). Для полутоновых и цветных изображений элементы изображения (пиксели) создаются за счет растрирования. При этом для грубой оценки можно считать, что полутоновое и цветное разрешение будет равно указанному двухцветному, деленному на восемь. В связи с этим важно отметить различные подходы двух ведущих производителей струйных принтеров Hewlett Packard и Epson к улучшению своих принтеров. Если Epson непрерывно повышает разрешение (данный момент составляет в большинстве моделей 1440*720), то Hewlett Packard повышает качество печати за счет уменьшения объема капель чернил и печати в несколько слоев (разрешение при этом составляет в большинстве моделей 600*600). На темных и насыщенных участках обе методики дают примерно одинаковый результат, а на светлых участках и плавных цветовых переходах сказывается недостаток малого разрешения (виден растровый рисунок).
Количество цветов. В черно-белых принтерах, которые уже практически не выпускаются печатающая головка была одна (Epson Stylus 200, HP DeskJet 520). В так называемых трехцветных принтерах можно устанавливать только один картридж либо с черными чернилами, либо тремя чернилами CMY (Cyan, Magenta, Yellow – голубой, малиновый, желтый), такие принтеры пригодны для эпизодической печати цветных иллюстраций (HP DeskJet 400, Lexmark 1020). В четырехцветных принтерах реализуется модель печати CMYK (Cyan, Magenta, Yellow, Black) и применяется либо четыре отдельных картриджа, либо два – черный и цветной. Большинство современных принтеров четырехцветные, но наилучшее качество достигается при использовании шестицветных принтеров.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 |
