
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1. Введение
В настоящее время оборудование для химических производств должно отвечать следующим основным требованиям: высокая производительность, надежность, возможность получения экологически чистого продукта.
В связи с этим роторы современных центрифуг и сепараторов, предназначенных для разделения жидких неоднородных систем в поле центробежных сил, имеют вес до 1500 кг и вращаются с частотой, соответствующей 4об/мин.
Поэтому, при работе такой машины опоры ротора воспринимают дополнительные динамические давления, вызываемые неуравновешенностью самого ротора.
Эти давления часто превышают в несколько десятков и сотен раз статические давления, что ведёт к нежелательному конструктивному усложнению опор и снижает долговечность как подшипников узлов, так и машины в целом.
Неуравновешенность ротора определяется неравно-мерностью распределения осадка по его стенкам, неравноплотностью материала его корпуса и входящих в него деталей, погрешностью металлорежущего оборудования, на котором эти детали изготовляют и характером соединения их между собой при сборке.
С целью снижения дополнительных динамических давлений, вал ротора монтируют в упругих опорах. Однако в этом случае возникают вынужденные колебания ротора, что ведёт к нарушению ламинарного потока обрабатываемой суспензии в нём и взмучиванию осадка. В результате резко снижается производительность машины, кроме того, часть осадка попадает в готовый продукт, ухудшая его экологические свойства.
Для устранения указанных нежелательных явлений ротор подвергают уравновешиванию (балансировке).
Прежде чем перейти к изложению сути балансировки, необходимо ознакомиться с основными геометрическими характеристиками твёрдого тела, вращающегося вокруг неподвижной оси, определяющими распределение массы по телу, называемыми моментами инерции.
2. МОМЕНТЫ ИНЕРЦИИ
Рассмотрим какое-либо твёрдое тело (рис.1). Возьмём в нём произвольную точку O, поместим в ней начало осей декартовых координат x, y, z и рассмотрим произвольную точку Bк. Пусть масса этой точки mk. Положение её определяется радиусом вектором ![]() , проекции которого на координатные оси xк, yк, zк.
, проекции которого на координатные оси xк, yк, zк.
Рис. 1
Тогда, скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния её от какой-либо оси, называется моментом инерции твёрдого тела относительно этой оси, т. е.
![]()
Скалярная величина, равная сумме произведений массы каждой точки тела на какие-либо две координаты, называется центробежным моментом инерции тела относительно соответствующей пары осей, т. е.
![]()
3. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТВЕРДОГО ТЕЛА ОТНОСИТЕЛЬНО ОСИ, ПРОХОДЯЩЕЙ ЧЕРЕЗ
ДАННУЮ ТОЧКУ В ЗАДАННОМ НАПРАВЛЕНИИ
Возьмём в теле произвольную точку O и примем её за начало системы координат x y z (рис.2). Проведём через это начало координат произвольную ось Ol, положение которой в выбранной системе определяется углами a, b, g, и найдем момент инерции тела относительно этой оси.
Рассмотрим произвольную точку тела Bк, масса которой mк, a координаты xк, yк, zк. Опустим из этой точки перпендикуляр hк на ось Ol, т. е.

Рис. 2
По определению момент инерции тела относительно оси Ol будет равен

где
,
тогда

Помножив rк на тригонометрическую единицу
![]()
и проделав ряд преобразований, получим
![]()
Подставим равенство (2) в (1), тогда получим

где Ix, Iy, Iz, – моменты инерции тела относительно
осей x, y, z, являются величинами положительными,
Ixy, Ixz, Iyz – центробежные моменты инерции тела
относительно соответствующих пар осей, могут быть положительными, отрицательными и равными нулю.
Понято, что, изменяя направление оси Оl, т. е. меняя углы a, b и g, получим различные величины соответствующих моментов инерции.
4. ЭЛЛИПСОИД ИНЕРЦИИ
Простое и вместе с тем наглядное представление о характере изменения величины момента инерции тела относительно какой-либо оси, проходящей через заданную точку, в зависимости от её направления, даёт следующее геометрическое построение (рис.3).
Возьмём в теле точку О и проведём через неё ось Оl. Пусть момент инерции тела относительно этой оси равен Il. Поместим в эту точку начало системы координат xyz. Тогда положение оси Оl в данной системе координат будет определяться углами a, b, g.
Отложим на Оl отрезок ОB, равный
![]()
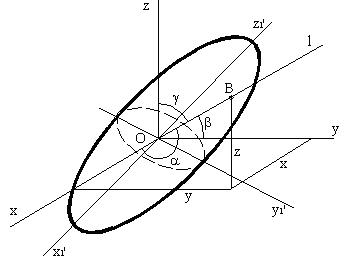
Рис. 3
Координаты точки B обозначим как x, y, z. Поскольку точка B лежит на прямой Оl, то направляющие косинусы этой прямой определяются как
Подставив данные выражения в (3) и сократив на Il, получим уравнение второго порядка
![]()
Так как момент инерции тела Il относительно любой оси всегда положителен и не равен нулю, то все точки этой поверхности находятся на конечном расстоянии от начала координат. Из всех известных поверхностей второго порядка этому условию удовлетворяет только эллипсоид.
Эллипсоид, построенный таким образом, называют эллипсоидом инерции для данного тела в точке O. Оси симметрии этого эллипсоида инерции называют главными осями инерции тела. Моменты инерции тела относительно этих осей называют главными моментами инерции тела.
Таким образом, для каждой точки тела можно построить эллипсоид инерции, который имеет три взаимно перпендикулярные главные оси инерции.
Из аналитической геометрии известно, что, если за оси координат принять главные оси эллипсоида x1¢, y1¢,z1¢, то в этом случае его уравнение не содержит членов с произведением координат. В результате уравнение эллипсоида инерции в данном случае примет вид
![]()
где Ix1, Iy1 и Iz1 - главные моменты инерции;
x1, y1, z1 - текущие координаты точки, расположенной на эллипсоиде инерции, относительно его главных осей.
Поскольку уравнение (4) не содержит слагаемых с произведениями координат точек, то центробежные моменты инерции относительно главных осей инерции в этом случае равны нулю, т. е.
![]()
Очевидно, справедливо и обратное утверждение, что, если центробежные моменты инерции относительно трёх взаимно перпендикулярных осей равны нулю, то эти оси являются главными осями инерции. Обращение в ноль трёх центробежных моментов инерции является необходимым и достаточным условием того, что соответствующие прямоугольные оси координат есть главные оси инерции.
Эллипсоид инерции, построенный для тела в его центре масс, называют центральным эллипсоидом инерции.
Главные оси этого эллипсоида называют главными центральными осями инерции тела.
Моменты инерции тела относительно этих осей называют главными центральными моментами инерции тела.
5. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ОПОР РОТОРА,
ВРАЩАЮЩЕГОСЯ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Рассмотрим наиболее общий случай, когда ротор массы M вращается вокруг неподвижной оси с угловой скоростью w и угловым ускорением e (рис.4).
Пусть на ротор действуют заданные активные силы ![]() : натяжение ремня
: натяжение ремня ![]() ремённой передачи или усилие в зацеплении
ремённой передачи или усилие в зацеплении ![]() зубчатой передачи, силы сопротивления воздуха
зубчатой передачи, силы сопротивления воздуха ![]() , сила тяжести ротора
, сила тяжести ротора ![]() .
.
Рис. 4
Жёстко с ротором свяжем систему координат xAyz и определим реакции ![]() и
и ![]() в опорах А и В.
в опорах А и В.
Для этого воспользуемся принципом Даламбера, согласно которому активные силы, реакции связей, действующие на тело и силы инерции всех точек тела, представляют собой уравновешенную систему сил. Изобразим эти силы.
Чтобы изобразить силы инерции, действующие на все точки тела, рассмотрим произвольную точку Bk, масса которой mk, а расстояние её от оси вращения rk (рис.5).
Рис. 5
Поскольку ротор вращается неравномерно, то ускорение точки
![]() ,
,
где ![]() - нормальное ускорение точки Bk;
- нормальное ускорение точки Bk;
![]() - касательное ускорение этой точки.
- касательное ускорение этой точки.
По величине эти ускорения равны
![]()
Тогда сила инерции, действующая на точку Bк,
![]()
Обозначим:
![]()
Поскольку, согласно принципу Даламбера, все указанные силы являют собой уравновешенную систему, то составим исходные уравнения равновесия статики:
После подстановки в эти уравнения значений сил инерции и некоторых преобразований исходные уравнения примут вид:
где xc и yc – координаты центра масс ротора.
Последнее уравнение не содержит реакций опор, поэтому оно представляет собой дифференциальное уравнение вращения ротора относительно оси z.
Остальные пять уравнений позволяют определить пять составляющих реакций подпятника А и подшипника В ротора.
Для удобства анализа разложим эти реакции на статические и дополнительные динамические.
Под статическими реакциями понимают реакции, определяемые только заданными активными силами при отсутствии вращения, т. е. когда
w = 0 и e = 0
Под дополнительными динамическими реакциями понимают реакции, определяемые только силами инерции, т. е. при отсутствии активных сил и реакций связей, но при наличии вращения.
Определим условия, при которых эти дополнительные динами-
ческие реакции будут равны нулю. Если не учитывать активные силы и реакции связей, то исходные уравнения (5) примут вид:
Решая совместно уравнения (6) относительно хс и ус,
находим, что
![]()
т. е. центр масс ротора должен находиться на оси его
вращения.
Решая систему уравнений (7) относительно Iyz и Ixz,
получим, что
![]()
Это значит, что ось вращения ротора должна быть его главной центральной осью инерции.
Итак, для того чтобы дополнительные динамические реакции были бы равны нулю, необходимо, чтобы ось вращения ротора совпадала бы с главной центральной осью инерции. Рассмотрим эти условия с геометрической точки зрения.
6. ГЕОМЕТРИЧЕСКАЯ КАРТИНА ИСКЛЮЧЕНИЯ
ДОПОЛНИТЕЛЬНЫХ ДИНАМИЧЕСКИХ РЕАКЦИЙ
Как было сказано ранее, что как бы точно не были
изготовлены детали ротора, они всегда имеют отклонения
от правильной геометрической формы. Это вызвано
погрешностью оборудования, инструмента и приспособлений, используемых при изготовлении. Кроме того, имеет место наличие заковов, шлаковых включений, газовых раковин и т. д. В результате, центр масс С ротора не лежит на оси его вращения, следовательно, ось вращения не совпадает с главной центральной осью инерции (рис.6).
Рис. 6
Выполнение условий (8) означает, что, хотя сама ось вращения ротора не совпадает с его главной центральной осью инерции, но центр масс ротора лежит на оси его вращения, т. е. ось вращения ротора и его главная центральная ось инерции пересекаются в центре масс ротора (рис.7).
Выполнение условий (9) означает, что главная ось инерции совпадает с осью вращения ротора (рис. 8).
Рис. 7
Рис. 8
Выполнение же условий (8) и (9) одновременно озна-чает, что в этом случае ось вращения ротора является главной центральной осью инерции.
Вывод: дополнительные динамические составляющие реакций опор вращающегося ротора будут равны нулю в том случае, если его ось вращения является главной центральной осью инерции.
Это есть теоретические предпосылки, которые указы-вают направление, в котором нужно двигаться, чтобы исключить полностью или как можно больше снизить дополнительные динамические нагрузки на опоры ротора.
Таким направлением является уравновешивание вра-щающихся масс. Оно осуществляется как расчётным путём на стадии проектирования, так и опытным путём в процессе сборки машины. Как правило, первое не исключает необходимость проведения опытного уравнове-шивания, которое принято называть балансировкой. Различают статическую и динамическую балансировку.
7. СТАТИЧЕСКАЯ БАЛАНСИРОВКА
Этот метод применяется для уравновешивания деталей и узлов, вращающихся с небольшими угловыми скорос-
тями и имеющими форму диска, т. е у которых диаметр значительно больше высоты.
При статической балансировке обеспечивается выполнение условий (8), т. е. когда
xc = 0 и yc = 0
Суть её состоит в следующем. Ротор, имеющий форму диска, устанавливают на оправку и затем на горизонтально установленных призмах (рис.9).
Рис. 9
Обозначим: C¢ - центр масс неуравновешенного ротора;
С - центр масс уравновешенного ротора.
Если центр масс С¢ ротора не лежит на оси его вращения, то ротор вместе с оправкой повернётся на направляющих призмах таким образом, что его центр масс C¢ окажется внизу, на вертикали, проходящей через точку контакта оправки с направляющей призмой (рис.10а).
Вверху, на вертикали, окажется "лёгкое" место. Теперь понятно, что, для того чтобы совместить центр масс С¢ ротора с осью его вращения, необходимо добавить со стороны "лёгкой" части (сверху) или убрать co стороны "тяжелой" (нижней) части некоторую массу Δm (рис.10б) так, чтобы
 ,
,
где М - масса ротора;
Δr - смешение центра масс неуравновешенного ротора
относительно оси его вращения;
r- радиус расположения массы Δm (радиус ротора).
а б в
Рис. 10
Поскольку, практически, определить величину смеще-ния центра масс ротора невозможно, то величину массы Δm находят методом подбора, т. е. повторяют ука-занную операцию несколько раз, пока не будет достигнуто безразличное положение ротора на направ-ляющих призмах (рис. 10в). Это будет означать, что ротор отбалансирован статически, т. е. xc =0 и yc =0.
Достоинством этого метода является его простота. Недостатком - низкая точность балансировки, обусловленная величиной коэффициента трения каче-ния оправки по направляющим призмам, который, как бы, определяет предел чувствительности данного спосо-ба.
С целью повышения точности статической баланси-ровки оправку и направляющие призмы изготавливают из прочных сталей с последующей термической обработкой.
Вторым недостатком является длительность процесса балансировки, поскольку он, как правило, повторяется несколько раз и осуществляется методом постепенного приближения (подбора).
Основным же недостатком статической балансировки является то, что выполняется только одно условие (8), когда
xc = 0 и yc = 0
Второе же условие (9) не выполняется, т. е.
Iyz ≠ 0 и Ixz ≠ 0
и, следовательно, ось вращения ротора не является глав-ной осью инерции (рис. 11).

Рис. 11
Это происходит по той причине, что, хотя мы и определили фазу установки добавочной массы Δm и её величину, но в данном случае невозможно найти положение центра масс ротора С¢ по его высоте h, поскольку он может быть смещён и в этом направлении. В результате масса M ротора, сосредоточенная в центре масс С¢, и добавочная масса Δm оказываются расположенными в разных плоскостях, перпендикулярных оси вращения (рис. 12).
Рис. 12
Таким образом, при вращении ротора возникают центробежные силы инерции указанных масс, представ-ляющие собой пару сил ( ),момент которой равен
),момент которой равен
![]()
Действие этой пары сил воспринимается опорами ро-тора в виде дополнительных динамических реакций ![]() и
и ![]() , которые также образуют пару сил с моментом, равным моменту центробежных сил инерции Mин
, которые также образуют пару сил с моментом, равным моменту центробежных сил инерции Mин
(рис. 13).
Рис. 13
Величина этого момента зависит от ω2 и от ∆h, которые в данном случае являются небольшими величи-нами. Следовательно, величина Mин будет тоже неболь-шой и дополнительные динамические реакции ![]() и
и ![]() также будут малы.
также будут малы.
Таким образом, статическая балансировка только сни -
жает дополнительные динамические нагрузки на опоры ротора, но полностью их не исключает.
8. ДИНАМИЧЕСКАЯ БАЛАНСИРОВКА
Применяется для уравновешивания роторов, у которых диаметр соизмерим с их высотой, и которые вращаются с большими угловыми скоростями. При этом выполняются и условия (8), и условия (9), т. е.
![]()
Это означает, что главная центральная ось инерции ротора в этом случае совпадает с осью его вращения, что, в принципе, полностью исключает дополнительные динамические нагрузки на опоры ротора.
Динамическая балансировка осуществляется на специальных балансировочных станках, которые могут быть с ручным, полуавтоматическим или автоматическим управлением и с вертикальным или горизонтальным расположением оси балансируемого ротора.
Рассмотрим пример динамической балансировки ротора центробежного сепаратора на простейшем вертикальном балансировочном станке с ручным управлением, кинематическая схема которого представлена на рис.14.
Станок включает в себя раму 1, которая предназначена для установки в её опоры 2 и 3 балансируемого ротора 4. Рама смонтирована на станине 5 при помощи регулируемых опор 6 и 7. Эти опоры содержат в себе упругие элементы 8 и 9, шарниры O и O1 могут перемещаться по вертикальным направляющим станины и фиксироваться фиксаторами 10 и 11 в любом положении.
Таким образом, если какая-либо из опор не зафиксирована, то она являет собой упругую опору, позволяющую раме 1 за счёт размещённого в ней упругого элемента, совершать колебания в
вертикальной плоскости (плоскость чертежа). Если же опора зафиксирована, то в этом случае она выполняет роль шарнирной
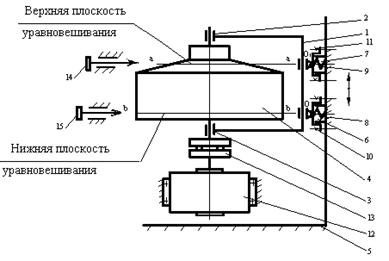
Рис. 14
неподвижной опоры (O или O1), позволяющей раме поворачиваться относительно неё в той же верти-кальной плоскости. Кроме того, на станине смонтирован привод 12 с разгонной фрикционной муфтой 13 и регистраторы 14 и 15 колебаний ротора в вертикальной плоскости.
Таким образом, если, например, регулируемая опора 6 не зафиксирована, а опора 7 зафиксирована, то рама может совершать колебательное движение в верти-кальной плоскости, качаясь относительно шарнира O1 зафиксированной опоры 7, и наоборот.
Процесс уравновешивания ротора происходит следую-щим образом. На роторе 4 намечают две как можно дальше удалённые друг от друга плоскости "a - a" и "b - b", перпендикулярные оси его вращения, называемые плоскостями уравновешивания. В дальнейшем, в этих плоскостях добавляют или удаляют неуравновешенную массу ∆m.
На уровне каждой из этих плоскостей на наружной поверхности ротора в виде сплошного кольца наносят тонкий слой разведённого в воде мела. Далее, ротор монтируют на специальной оправке и устанавливают в опорах 2 и 3 рамы 1. Перемещают регулируемые опоры 6 и 7 таким образом, чтобы шарниры О и O1 были бы расположены по высоте на одном уровне с плоскостями уравновешивания "a - a" и "b - b". В этом положении опоры фиксируются фиксаторами 10 и 11.
Затем включают привод 12 и при помощи фрикционной муфты 13 разгоняют ротор до частоты вращения несколько превышающей собственную частоту колебаний рамы с ротором на одной из упругих опор.
После этого выключают привод и освобождают от фиксации одну из опор, например, опору 7. При вращении ротора на выбеге, за счёт сил сопротивления, частота его вращения плавно уменьшается. В период, времени, когда частота вращения ротора совпадёт с частотой собственных колебаний рамы с ротором на упругом элементе 9 относительно неподвижного шарнира O (зона резонанса), резко возрастёт амплитуда коле-баний рамы с ротором в вертикальной плоскости. Это фиксируется регистратором 14, который постепенно подводят к качающемуся ротору до тех пор, пока он не оставит риску на покрытой мелом поверхности ротора на уровне плоскости "a - a". Середина этой риски указывает положение тяжёлого места ротора в данной плоскости. После этого останавливают ротор и любым известным способом удаляют в этом месте некоторую массу ∆m, после чего повторяют процесс уравновешивания. Так продолжается до тех пор, пока регистратор 14 не очертит на наружной поверхности ротора сплошную линию. Это означает, что ротор отбалансирован по верхней плоскости "a - a" (рис.15).
После этого освобождают от фиксации опору 6, фиксируют опору 7 и аналогично проводят уравновешивание ротора по нижней плоскости "b - b" (рис. 16).
В заключение, для проверки, проводят контрольный пуск на незафиксированных опорах 6 и 7. В этом случае при прохождении зоны резонанса не должно наблюдаться какого–либо увеличения амплитуды колебаний ротора, т. е регистраторы 14 и 15 очертят сплошную линию. Если это так, то считается, что ротор отбалансирован динамически.
Рис. 15
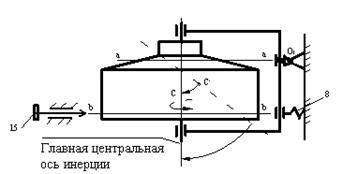
Рис. 16
В результате, после установки ротора в его собственные опоры последние не будут испытывать дополнительные динамические давления.
В настоящее время динамическую балансировку рото-ров производят на сложнейших агрегатах, включающих
в себя как непосредственно балансировочный станок, так и устройство для удаления или добавления неуравновешенной массы ∆m.
Однако в основе любого современного балансировочного станка лежит принцип, описанный ранее, предусматривающий уравновешивание ротора по двум плоскостям.
Учитывая последние достижения в области электроники и вычислительной техники, балансировочные станки оснащены специальными датчиками вибрации и счётно-решающими устройствами, в которых обрабатывается информация, идущая от датчиков, т. е. решается система уравнений (6) и (7).
В результате, балансировку ротора на таком станке осуществляют в один приём, т. е. за один пуск станка определяют фазу расположения неуравновешенной массы ∆m и её величину в обеих плоскостях уравновешивания.
Устройства для удаления или добавления неуравновешенной массы позволяют удалять или добавлять её непосредственно в процессе уравновешивания ротора, т. е. не останавливая станка, на вращающемся роторе. Принципиальная схема такого станка представлена на рис.17
Рис. 17
Принципиальная схема станка:
1 - балансируемый ротор; 2 - устройство удаления (добавления) неуравновешенной массы; 3 – привод;
4 - разгонная муфта; 5 - пульт управления; 6 - сельсин – датчик; 7 - сельсин – приёмник; 8 - датчик вертикальных колебаний; 9 - датчик горизонтальных колебаний;
10 - упругие элементы; 11 - приборная панель верхней плоскости уравновешивания; 12 - приборная панель нижней плоскости уравновешивания; 13 - счётно-решающее устройство
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. , Никитин теоретической механики. - М.: Высшая школа, 19с.
2. Артоболевский механизмов и машин. - М.: Наука, 19с.
Содержание
1. Введение…………………………………………….3
2. Моменты инерции ………………………………….4
3. Определение момента инерции твердого
тела относительно оси, проходящей через
данную точку в заданном направлении…………...5
4. Эллипсоид инерции………………………………...7
5. Определение реакций опор ротора,
вращающегося вокруг неподвижной оси…………9
6. Геометрическая картина исключения
дополнительных динамических реакций…………14
7. Статическая балансировка………………………...16
8. Динамическая балансировка………………………21
Библиографический список……………………….27
