
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство Образования РФ
Московский Государственный Индустриальный Университет
МГИУ
Динамика механической системы
Методическая разработка к выполнению
расчетно-графической работы
по динамике механической системы
А10-262
Москва 2004
Методическая разработка предназначена для студентов II курса дневного отделения и студентов II курса вечернего отделения всех специальностей.
В методической разработке по выполнению расчетно-графической работы по динамике механической системы даны общие указания по решению задач динамики, дана методика решения задач динамики механической системы различными способами, а также даны указания и требования по оформлению работы. Кроме этого, приведены примеры и даны их решения.
При составлении методической разработки был использован опыт кафедры «Теоретическая механика и теория механизма».
Утверждено на заседании кафедры,
протокол от 02.10.03
Составители: , , .
ОБЩИЕ УКАЗАНИЯ
Расчетно-графическая работа по динамике механической системы состоит из задачи, которую необходимо решить четырьмя различными способами. Эти способы представляют следующие темы раздела «Динамика» курса «Теоретическая механика».
Способ №1– использование теоремы об изменении кинетической энергии механической системы;
Способ №2– использование дифференциальных уравнений движения, составленных для каждого тела механической системы.
Способ №3– использование общего уравнения динамики;
Способ №4– использование уравнений Лагранжа II рода.
К выполнению данной работы можно приступать только после тщательной проработки теоретического материала, а также при самостоятельном решении всех домашних задач, заданных на практических занятиях.
При выполнении задания рекомендуется использовать следующую литературу:
1. «Краткий курс теоретической механики».
2. , , «Теоретическая механика в примерах и задачах» ч. п.
Задачу, представленную в расчетно-графической работе по динамике механической системы, необходимо решить четырьмя различными способами.
ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАСЧЕТНО-ГРАФИЧЕСКОЙ РАБОТЫ
1. Расчетно-графическая работа выполняется на листах формата А-4 (297*210).
2. На титульном листе необходимо указать наименование работы, раздел курса, фамилию и инициалы, шифр учебной группы, вариант задания, год выполнения работы (см. приложение).
3. В задаче должен быть приведен полностью текст условия, а также составлено краткое условие задачи со всеми необходимыми цифровыми данными ( Дано: … Найти: …).
4. Рисунки и схемы выполняются карандашом. На рисунках не должно быть цифровых данных – только буквенные обозначения.
5. При решении задачи необходимо приводить пояснения и ссылки на используемые аксиомы, законы, теоремы, принципы и положения. Необходимо оставлять поля для замечаний и вопросов преподавателя.
6. Все уравнения, теоремы и принципы механики, а также решения задачи необходимо проводить в общем виде в буквенных обозначениях. Цифровые данные подставлять только при определении неизвестных.
7. Расчеты производить с точностью до трех значащих цифр после запятой.
8. В работе должен быть приведен анализ и исследование полученных в ходе решения задачи результатов, сделаны необходимые выводы и приведены ответы.
9. В конце работы ставится дата выполнения и подпись. В случае необходимости приводится список используемой литературы.
ПЕРВЫЙ СПОСОБ: ИСПОЛЬЗОВАНИЕ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ ДЛЯ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ ГРУЗА 1.
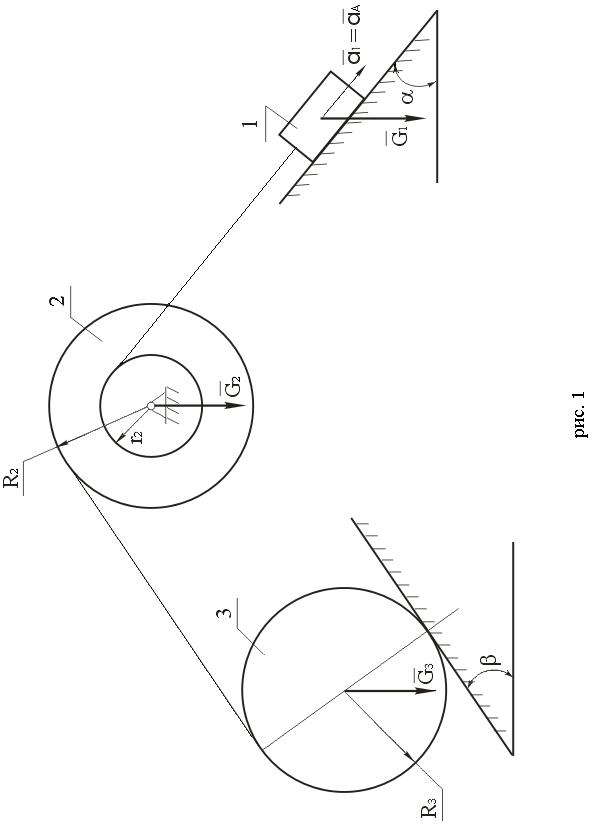
1. Изображаем механическую систему в исходном состоянии с учетом соотношений размеров тел, составляющих систему. Углы изображаются с помощью транспортира. (рис.1 - заданная схема).
2. Выписываем полное условие задачи. На основе полного условия составляем краткое условие, в котором приводим все цифровые данные задачи.
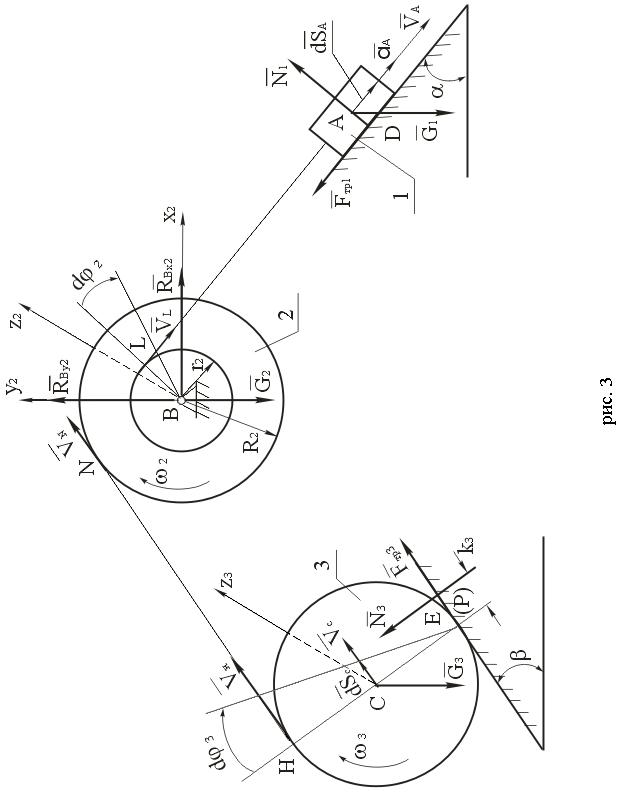
Механическая система (см. рис.1) состоит из трех абсолютно твердых тел: груза 1, двухступенчатого составного барабана 2 и сплошного однородного цилиндрического катка 3. Тела между собой соединены невесомыми нерастяжимыми нитями. Ускоренное перемещение груза 1 по шероховатой наклонной плоскости, образующей угол a с горизонтом вызывает вращение составного барабана 2 вокруг неподвижной горизонтальной оси. Вследствие вращения барабана каток 3 катится без скольжения вверх по шероховатой наклонной плоскости образующей угол b с горизонтом при наличии трения качения. Даны веса тел ( ), размеры ( R1, R2, r2, R3), радиус инерции барабана r2, коэффициент трения скольжения груза f1 и коэффициент трения качения катка k3. Определить ускорение груза I.
), размеры ( R1, R2, r2, R3), радиус инерции барабана r2, коэффициент трения скольжения груза f1 и коэффициент трения качения катка k3. Определить ускорение груза I.
Дано:
G1 = 400 н; R1 =0,20 м; f1=0,12;
G2 = 100 н; R2 =0,15 м; k3=0,0025 м;
G3 = 250 н; r2=0,10 м; g = 9,81 м/с2
a = 60о; R3 =0,25 м;
b =30o; r2 = 0,18 м;
Найти: ![]()
3. Производится анализ движения тел, входящих в механическую систему. (см. рис.1)
Тело 1 – груз, совершает поступательное движение;
Тело 2 – блок, совершает вращательное движение;
Тело 3 – каток, совершает плоскопараллельное движение.
4. Изображаем механическую систему в целом в произвольный момент времени (рис. 2).
Выявляем, описываем и изображаем на чертеже все силы, которые действуют на механическую систему и определяем их точки приложения.
Активные силы:
![]() - сила тяжести груза 1 приложена в точке А;
- сила тяжести груза 1 приложена в точке А;
![]() - сила тяжести груза 2 приложена в точке В;
- сила тяжести груза 2 приложена в точке В;
![]() - сила тяжести груза 3 приложена в точке С.
- сила тяжести груза 3 приложена в точке С.
Согласно аксиоме освобождаемости от связей рассматриваются силы реакций связей:
![]() – нормальная реакция плоскости груза 1, приложенная
– нормальная реакция плоскости груза 1, приложенная
в точке Д;
![]() – сила трения скольжения груза 1 о плоскость, приложенная
– сила трения скольжения груза 1 о плоскость, приложенная
в точке Д;
![]() – составляющие реакции неподвижного цилиндричес-
– составляющие реакции неподвижного цилиндричес-
кого шарнира, приложены в точке В;
![]() – нормальная реакция плоскости на каток приложена
– нормальная реакция плоскости на каток приложена
в точке Е, отстоящей от точки (Р) на величину
коэффициента трения качения k3;
![]() – сила трения скольжения катка 3 о плоскость,
– сила трения скольжения катка 3 о плоскость,
приложена в точке (Р).
5. Записываем уравнение, определяющее 1-ый способ решения задачи – теорему об изменении кинетической энергии системы.
Для определения ускорения груза 1 удобнее использовать теорему об изменении кинетической энергии в дифференциальной форме.
 , или
, или 
где Т – кинетическая энергия системы,
dAke – элементарная работа kой внешней силы,
dAki - – элементарная работа kой внутренней силы.
6. Определяем кинетическую энергию системы.
Кинетическая энергия системы складывается из кинетической энергии тел, составляющих систему.
Т=SТк
Для данной задачи Т=Т1 +Т2 +Т3,
где Т1, Т2, Т3 – кинетическая энергия груза, блока и катка соответственно.
Кинетическая энергия груза, совершающего поступательное движение:
![]()
![]()
Кинетическая энергия блока, совершающего вращательное движение:
 , где
, где 
здесь r2 – радиус инерции блока 2 относительно оси z2 (см. рис.2).
Угловая скорость блока w2 определяется из формулы:
V = wh , 
для данного случая (см. рис. 2)  ,
, 
тогда  .
.
Тогда 
Кинетическая энергия катка, совершающего плоскопараллельное
движение 
где 
JZ3 - момент инерции тела относительно оси z3, проходящей через центр масс, для катка - сплошного однородного (см. рис.2).
Выразим скорость точки С и w3 через V A (см. рис. 2):

![]()
Это получено исходя из того, что мгновенный центр скоростей катка
находится в точке P (см. рис. 2).
Тогда 
Сложив кинетические энергии тел, получим кинетическую энергию системы в произвольный момент времени:

где 
![]() приведенная масса системы.
приведенная масса системы.
Это обозначение введено для уменьшения громоздкости дальнейших преобразований.
7. Определяем элементарную работу всех сил, действующих на механическую систему.
Вспомним, что элементарная работа силы или пары сил определяется формулами:
 ,
,
dA = MZ dj,
где ![]() – сила, МZ – момент силы относительно оси Z,
– сила, МZ – момент силы относительно оси Z,
![]() – элементарное перемещение точки приложения силы,
– элементарное перемещение точки приложения силы,
dj - элементарный угол поворота тела, к которому приложен момент.
Выберем и покажем на чертеже элементарные перемещения, точек и тел (см. рис.2):
![]() - элементарное перемещение точки А,
- элементарное перемещение точки А,
![]() - элементарное перемещение точки С,
- элементарное перемещение точки С,
![]() – элементарный угол поворота блока 2 вокруг оси Z2,
– элементарный угол поворота блока 2 вокруг оси Z2,
проходящий через центр масс – точку В.
![]() - элементарный угол поворота катка 3 вокруг оси Z3,
- элементарный угол поворота катка 3 вокруг оси Z3,
проходящий через центр масс – точку С.
Тогда элементарная работа внешних сил, приложенных к системе:
 ,
,
 ;
;
 т. к.
т. к. ![]() ;
;
 , т. к. точка В неподвижна;
, т. к. точка В неподвижна;
 , т. к.
, т. к. ![]() ;
;
 ,
,
![]() , т. к.
, т. к. ![]() (Р – МЦС),
(Р – МЦС),

Здесь Mтр - момент пары сил трения качения, ![]()

Сложив все элементарные работы, получим

Выразим dSС и dj3 через dSA, учитывая, что зависимости для перемещений такие же как и для скоростей, т. е.
Тогда
![]()
![]()

где 
Сумма элементарных работ внутренних сил SdAki = 0, так как внутренними силами являются попарно равные и противоположно направленные силы натяжения нитей, и, кроме того, вследствие нерастяжимости нитей, точки приложения этих сил имеют одинаковые элементарные перемещения:
 ,
,![]()
8. Определяем производную от кинетической энергии по времени.

 , т. к. точка движется прямолинейно, и
, т. к. точка движется прямолинейно, и ![]()
9. Разделим выражение SdAke на dt, получим
10. Подставим полученные выражения в формулу теоремы об изменении кинетической энергии.

Отсюда определим ускорение точки А

Подставив полные выражения для FПР и MПР окончательно получим
![]()
11. Производим числовой расчет.
Определяем ускорение груза 1 – ![]()
12. Проводим анализ полученных результатов.
Так как все параметры ,входящие в выражение ускорения являются постоянными, то и ускорение груза I является величиной постоянной
![]() = const. Поэтому для определения закона движения груза необходимо дважды проинтегрировать величину
= const. Поэтому для определения закона движения груза необходимо дважды проинтегрировать величину ![]() по времени.
по времени.
После первого интегрирования получим скорость груза

Закон движения получим интегрированием скорости

Если в начальный момент система находилась в покое, то это означает, что для t = 0;
 ,
, .
.
Определив произвольные постоянные, используя начальные условия, получим C1 = C2 =0 и уравнение движения груза I будет  , а скорость груза
, а скорость груза ![]() , т. е. груз совершает равноускоренное движение по закону .
, т. е. груз совершает равноускоренное движение по закону .
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
1. Как вычисляется кинетическая энергия твердого тела в различных случаях его движения?
2. Как выразить элементарную работу силы, приложенной к некоторой точке, через приращение дуговой координаты этой точки?
3. Каково векторное выражение элементарной работы силы?
4. Каково выражение элементарной работы силы через проекции силы на оси координат?
5. Как вычисляется работа сил тяжести и силы упругости?
6. Как вычисляется работа сил сопротивления качению?
7. Сформулируйте теорему об изменении кинетической энергии механической системы.
8. Какая форма выражения теоремы об изменении кинетической энергии применяется при определении скорости и какая форма – при определении ускорения?
