
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
В первом случае достаточно каким-либо образом (аналитически или экспериментально) один раз определить положение экстремума, а затем использовать систему стабилизации. Во втором и третьем случае необходимо следить за экстремумом. Если закон дрейфа известен, то может быть использована следящая система или система программного управления. При неизвестном законе дрейфа обе системы оказываются неспособными обеспечить цель управления и требуется специальная экстремальная система.
Классическим примером системы такого типа является система автоподстройки частоты радиоприёмника [11], частотная характеристика которой имеет ярко выраженный экстремум (рис. 1.2).
Рис. 1.2. Вид АЧХ радиоприемника |
Настройка радиоприемника предполагает поддержание максимума громкости звука или минимума искажений при изменяющихся условиях работы.
Экстремальное регулирование применяется в ситуациях, когда необходимо на предельном уровне (максимуме или минимуме) поддерживать один их показателей работы автоматической системы [11-13, 15]. Такая задача возникает, например, при поддержании скорости полета самолета, соответствующей минимуму расхода горючего на единицу длины пути [2]. Примерами экстремальных систем регулирования могут служить также система автоматического поддержания максимальной скорости проходки скважины турбобуром при меняющихся свойствах грунта; система поворота лопастей гидравлических турбин; автоматические системы управления различными производственными процессами, поддерживающие наивыгоднейший режим работы станков; управление энергетическими установками и системами, обеспечивающее автоматические поиск и поддержание экстремума эксплутационных характеристик; системы автоматизации топочных устройств, паровых котлов и др.
Основной предварительной работой, которую нужно проводить перед синтезом экстремальных систем, является формализация технической задачи создания регулятора. Причем формализации подвергаются свойства объекта управления, условия работы системы, технологические требования к свойствам системы.
1.2. Описание объекта управления
Будем рассматривать задачу синтеза для объектов, описание которых включает в себя динамическую часть и статическую экстремальную характеристику. Функциональная схема такого объекта управления представлена на рис. 1.3.
Рис. 1.3. Функциональная схема экстремального объекта управления |
Математическая модель объекта имеет вид
 (1.1)
(1.1)
Здесь ![]() - вектор состояния объекта;
- вектор состояния объекта; ![]() - вектор выходных переменных динамической части объекта;
- вектор выходных переменных динамической части объекта;  - выходная переменная экстремального объекта, которая представляет собой нелинейную однозначную функцию и имеет минимум по переменной
- выходная переменная экстремального объекта, которая представляет собой нелинейную однозначную функцию и имеет минимум по переменной ![]() ;
;  - вектор нелинейных функций, удовлетворяющих условию существования и единственности решения дифференциального уравнения;
- вектор нелинейных функций, удовлетворяющих условию существования и единственности решения дифференциального уравнения;  - матрица переменных коэффициентов;
- матрица переменных коэффициентов; ![]() - вектор-функция, допускающая многократное дифференцирование. Зависимость элементов функций
- вектор-функция, допускающая многократное дифференцирование. Зависимость элементов функций ![]() и
и ![]() от времени отражает влияние действующих на объект возмущений, зависимость Y от t отражает дрейф экстремума во времени. Предполагается, что параметры динамической части объекта
от времени отражает влияние действующих на объект возмущений, зависимость Y от t отражает дрейф экстремума во времени. Предполагается, что параметры динамической части объекта  и могут изменяться в заранее указанных пределах (
и могут изменяться в заранее указанных пределах (![]() ). Предполагается также, что темп изменения величин
). Предполагается также, что темп изменения величин ![]() ,
, ![]() и
и ![]() на порядок медленнее основных процессов в объекте.
на порядок медленнее основных процессов в объекте.
1.3. Описание экстремальной характеристики
Возможны различные варианты описания характеристики Y(t,y). Рассмотрим некоторые наиболее часто встречающиеся описания статической экстремальной характеристики.
1) Экстремальная характеристика типа "модуль" приведена на рис. 1.4.
Рис. 1.5. Экстремальная характеристика типа "парабола" |
|
 Рис. 1.4. Экстремальная характеристика типа "модуль"
Рис. 1.4. Экстремальная характеристика типа "модуль"В простейшем случае она описывается уравнением Y=½y½.
В более общем случае уравнение экстремальной характеристики типа "модуль" имеет вид
![]() . (1.2)
. (1.2)
Уравнение (1.2) содержит параметры, отражающие изменение экстремальной характеристики во времени: k1(t) – наклон ветвей характеристики; y0(t) – горизонтальный дрейф экстремума; k2(t) – вертикальный дрейф экстремальной характеристики.
2) Экстремальная характеристика типа "парабола" (рис. 1.5).
В простейшем случае она описывается уравнением Y=y2 .
В общем случае уравнение экстремальной характеристики типа "парабола" имеет вид
![]() , (1.3)
, (1.3)
где k1(t) отражает наклон ветвей параболы; y0(t) – горизонтальный дрейф экстремальной характеристики; k2(t) – вертикальный дрейф экстремума.
3) Экстремальная характеристика типа "парабола n-го порядка" описывается уравнением
![]()
где ki(t) – коэффициенты, которые отражают наклон ветвей параболы (i=1,2,..,n); y0(t) – горизонтальный дрейф экстремальной характеристики; k0(t) – вертикальный дрейф экстремума.
4) Матричное описание экстремальной характеристики. Это общее описание, которое имеет вид
![]() . (1.4)
. (1.4)
Зависимость элементов матрицы D(t) отражает изменение во времени экстремальной характеристики.
1.4. Условие экстремума
Рассмотрим экстремальную характеристику
![]() ,
, ![]() , (1.5)
, (1.5)
полагая для простоты, что отсутствует дрейф экстремума.
Как известно, необходимым условием экстремума является равенство нулю градиента, полученного для этой характеристики, т. е. выполнение условия [15]
![]() , (1.6)
, (1.6)
где  - градиент (вектор частных производных).
- градиент (вектор частных производных).
Для определения точки минимума или максимума характеристики (1.5) даются приращения по переменным ![]() относительно экстремального значения
относительно экстремального значения ![]() в виде
в виде

и исследуются полученные значения выходной характеристики Y. В случае, когда справедливы соотношения
 , (1.7)
, (1.7)
Y0 соответствует точке минимума, а при выполнении условий
 (1.8)
(1.8)
![]() есть точка максимума.
есть точка максимума.
1.5. Постановка задачи синтеза экстремальных систем
Цель экстремального управления состоит в обеспечении минимума или максимума заданной функции качества работы системы Y(t,y) при недостаточной априорной информации о характере ее изменений.
Задача синтеза экстремальной системы заключается в отыскании для объекта типа (1.1) такого управляющего воздействия U(×), которое позволяло бы автоматически определить точку экстремума и удерживать в ней систему. Математически это означает выполнение условия
 , (1.9)
, (1.9)
где ![]() - экстремальное значение выходной характеристики.
- экстремальное значение выходной характеристики.
Поскольку экстремальному значению ![]() соответствует определенное значение
соответствует определенное значение ![]() , задачу синтеза можно переформулировать. Для экстремального объекта (1.1) необходимо определить управляющее воздействие U(×), которое обеспечит выполнение свойства
, задачу синтеза можно переформулировать. Для экстремального объекта (1.1) необходимо определить управляющее воздействие U(×), которое обеспечит выполнение свойства
![]() (1.10)
(1.10)
Как видим, задача синтеза экстремальной системы сводится к задаче стабилизации в точке экстремума ![]() , а для контроля за достижением этой точки необходимо использовать условия (1.6)…(1.8).
, а для контроля за достижением этой точки необходимо использовать условия (1.6)…(1.8).
Таким образом, при синтезе экстремальных систем от алгоритма управления требуется организация движения в точку экстремума, если градиент выходной характеристики G не равен нулю, и удержание объекта в точке экстремума, если он равен нулю.
Анализ постановки задачи синтеза экстремальных систем управления показывает, что в ней можно выделить три относительно самостоятельные подзадачи:
· задача оценки градиента;
· организация движения системы к точке экстремума в соответствии с условием G ® 0;
· стабилизация системы в точке экстремума.
Рассмотрим последовательно каждую из них.
1.6. Способы оценки градиента
Задача непрерывной оценки градиента представляет собой самостоятельную и очень непростую проблему. К настоящему времени разработаны различные способы оценки как величины, так и знака градиента [11-13, 15, 18]. Остановимся на некоторых из них.
1.6.1. Способ деления производных
Рассмотрим суть этого способа на примере одноканальных объектов, статическая экстремальная характеристика которых имеет вид
![]() . (1.11)
. (1.11)
Определим полную производную выходной переменной по времени.
 . (1.12)
. (1.12)
Второе слагаемое в выражении (1.12) обусловлено наличием дрейфа. При медленном дрейфе экстремальной характеристики им можно пренебречь, так как  . В этом случае из выражения (1.12) можно определить величину градиента как отношение двух полных производных по времени:
. В этом случае из выражения (1.12) можно определить величину градиента как отношение двух полных производных по времени:
 . (1.13)
. (1.13)
Структурная схема устройства, реализующего оценку градиента по методу деления производных, представлена на рис. 1.6.
Рис. 1.6. Структурная схема устройства оценки градиента методом деления производных |
Поскольку операция идеального дифференцирования на практике нереализуема, для оценки производных следует использовать дифференцирующие фильтры (на рис. 1.6 они показаны пунктиром).
Достоинством данного способа является простота технической реализации.
Недостатками являются невозможность оценки градиента при малых значениях ![]() , что следует из выражения (1.13), и слабая помехозащищённость. Для уменьшения влияния помехи вместо идеальных дифференцирующих устройств нужно использовать дифференцирующие фильтры выше первого порядка.
, что следует из выражения (1.13), и слабая помехозащищённость. Для уменьшения влияния помехи вместо идеальных дифференцирующих устройств нужно использовать дифференцирующие фильтры выше первого порядка.
1.6.2. Способ конечных разностей
Данный метод оценки градиента также применяется для одноканальных объектов со статической экстремальной характеристикой (1.11). Здесь, в отличие от предыдущего способа, производные ![]() и
и ![]() представляются в виде конечных разностей
представляются в виде конечных разностей
 ,
,
где k - дискретный момент времени; T - шаг квантования (дискретизации).
В основе способа лежит приближенное соотношение
 (1.14)
(1.14)
Структурная схема устройства, реализующего дискретную оценку градиента показана на рис. 1.7.
Рис. 1.7. Структурная схема оценки градиента
методом конечных разностей
Достоинство данного метода заключается в высокой помехозащищенности, так как фильтрующие свойства обусловлены усреднением переменных на интервале дискретизации.
Недостатком метода является плохая оценка при малых приращениях ![]() в соответствии с выражением (1.14)
в соответствии с выражением (1.14)
1.6.3. Оценка знака градиента
В некоторых случаях для организации движения к экстремуму достаточно оценивать только знак градиента, т. е. определять функцию
sign G.
Рассмотрим подробнее, что она собой представляет. В соответствии с определением знака функции sign G можно представить в виде
 (1.15)
(1.15)
или после несложных преобразований
 . (1.16)
. (1.16)
Предполагая, что шаг квантования Т достаточно мал, заменим в выражении (1.16) дифференциалы конечными разностями
![]() ,
,
![]() .
.
Это позволяет представить соотношение (1.16) в виде
 , (1.17)
, (1.17)
которое и используется для оценки знака градиента как аппаратным, так и программным способом.
1.6.4. Способ синхронного детектирования
В основе метода лежит идея синхронного детектора, который используется в радиотехнике для выделения на фоне основного сигнала дополнительной составляющей.
Способ синхронного детектирования (рис. 1.8) предполагает добавление к основному сигналу на входе экстремальной характеристики y дополнительного поискового синусоидального сигнала малой амплитуды и высокой частоты  с последующим выделением соответствующей составляющей из выходного сигнала Y.
с последующим выделением соответствующей составляющей из выходного сигнала Y.
Рис. 1.8. Схема оценки градиента методом синхронного детектирования |
Сравнение фаз входного и выходного периодических сигналов позволяет сделать вывод о том, движется ли система к экстремуму или удаляется от него.
Метод позволяет получить оценку знака градиента, а введение в систему специального усредняющего фильтра дает возможность оценить и его величину.
Работу метода синхронного детектирования иллюстрирует график рис.1.9.
Рис. 1.9. Диаграмма, иллюстрирующая изменение фазы периодического поискового сигнала при переходе через экстремум |
Наличие колебаний на входе приводит к появлению колебаний такой же частоты на выходе, причем при прохождении экстремума колебания на выходе изменяют фазу на 180 градусов.
Для сравнения сигналов с входа и выхода экстремального объекта используется специальное фазочувствительное устройство. Если входной и выходной сигналы имеют одну и ту же фазу, то на выходе фазочувствительного устройства получается положительный сигнал, в противном случае – отрицательный. Этот сигнал, пройдя через специальный фильтр, будет пропорционален частной производной
В качестве фазочувствительного элемента можно использовать блок умножения, имеющий два входа (рис. 1.10).
Рис. 1.10. Графики, иллюстрирующие работу фазочувствительного элемента на базе блока умножения |
Покажем аналитически, что метод синхронного детектирования позволяет получить оценку частной производной.
При малой амплитуде поискового сигнала можно считать, что статическая экстремальная характеристика линейна. Заменим её касательной в этой точке (рис. 1.11).
Рис. 1.11. Линеаризация статической экстремальной характеристики в рабочей точке |
В этом случае уравнение статической экстремальной характерис-тики в малой окрестности рабочей точки можно записать в виде
![]() , (1.18)
, (1.18)
где k - тангенс угла наклона касательной, который определяется соотношением
 . (1.19)
. (1.19)
Таким образом, k=G - искомая оценка градиента.
Сигнал на входе экстремального объекта представляет собой сумму
![]() . (1.20)
. (1.20)
Для простоты будем полагать, что y* = 0 (преобразования не изменятся и в общем случае, но станут более громоздкими). Выражение (1.18) с учетом (1.19) и (1.20) принимает вид
![]() . (1.21)
. (1.21)
Запишем теперь выражение для сигнала на выходе фазочувствительного устройства:
![]() (1.22)
(1.22)
или с учетом (1.21)
![]() . (1.23)
. (1.23)
Так как усредняющий фильтр усредняет сигналы на периоде, то на его выходе получим
 . (1.24)
. (1.24)
Представим в (1.24) интеграл суммы в виде суммы интегралов
 . (1.25)
. (1.25)
Первый интеграл в выражении (1.25) на периоде будет равен нулю, а во втором ![]() выразим через косинус двойного угла:
выразим через косинус двойного угла:
 .
.
Полученное выражение преобразуем к виду
 . (1.26)
. (1.26)
Поскольку интеграл ![]() на периоде равен нулю, на выходе фильтра получим сигнал, пропорциональный градиенту
на периоде равен нулю, на выходе фильтра получим сигнал, пропорциональный градиенту
![]() . (1.27)
. (1.27)
Метод синхронного детектирования работает устойчиво, хорошо защищен от помех и часто применяется в реальных системах поиска экстремума. Его также можно использовать для оценки градиента в многоканальных системах. Для этого на вход экстремального объекта к каждому значению ![]() добавляется свой поисковый сигнал определенной частоты и амплитуды. На выходе экстремальной характеристики необходимо поставить несколько полосовых фильтров, каждый из которых будет выделять свою составляющую выходного сигнала
добавляется свой поисковый сигнал определенной частоты и амплитуды. На выходе экстремальной характеристики необходимо поставить несколько полосовых фильтров, каждый из которых будет выделять свою составляющую выходного сигнала ![]() .
.
1.6.5. Оценка градиента с помощью специального фильтра
Специальный способ оценки градиента разработан на кафедре автоматики НГТУ. Структурная схема устройства (фильтра) оценки частной производной представлена на рис. 1.12.
Покажем, что данное устройство действительно позволяет оценивать частную производную. Промежуточная переменная z определяется соотношением
 , (1.28)
, (1.28)
где ![]() - оценка выходной переменной экстремального объекта; T - постоянная времени устройства.
- оценка выходной переменной экстремального объекта; T - постоянная времени устройства.
Рис. 1.12. Структурная схема фильтра оценки градиента |
Запишем уравнение динамики фильтра оценки градиента относительно переменной z , для чего продифференцируем по времени соотношение (1.28):
 (1.29)
(1.29)
Учитывая, что ![]() , представим (1.29) в виде
, представим (1.29) в виде
![]() , (1.30)
, (1.30)
При достаточно малом значении постоянной времени (![]() ) уравнение (1.30) вырождается в соотношение
) уравнение (1.30) вырождается в соотношение
![]() (1.31)
(1.31)
из которого следует
 . (1.32)
. (1.32)
Таким образом, предложенное устройство действительно позволяет оценивать частную производную, причем точность оценки будет тем выше, чем меньше параметр T.
На практике необходимую для оценки градиента производную ![]() оценивают с помощью дифференцирующего фильтра (на рис. 1.12 показан пунктиром), имеющего малую постоянную времени.
оценивают с помощью дифференцирующего фильтра (на рис. 1.12 показан пунктиром), имеющего малую постоянную времени.
1.7. Организация движения к экстремуму
1.7.1. Введение
Организация движения к экстремуму в автоматической системе основана на контроле градиента и использовании его в законе управления. Такие системы называются градиентными экстремальными системами (рис. 1.13).
Рис. 1.13. Обобщенная функциональная схема градиентной экстремальной системы |
Существующие способы построения СЭР используют и оценку значения градиента (системы с движением в функции градиента) [15], и оценку знака компонент градиента (системы с запоминанием экстремума, отдельные типы шаговых систем).
1.7.2. Градиентные системы первого порядка
Рассмотрим организацию движения к экстремуму на примере простейшего объекта управления, который описывается следующей системой уравнений:
 (1.33)
(1.33)
Сформируем пропорциональный градиенту закон управления в виде
![]() . (1.34)
. (1.34)
Подставив (1.34) в уравнение объекта (1.33), получим уравнение замкнутой системы
![]() , (1.35)
, (1.35)
которое представляет собой нелинейное дифференциальное уравнение относительно переменной y. Полагая ![]() , запишем для него уравнение статики
, запишем для него уравнение статики
![]() , (1.36)
, (1.36)
где зависимость G от t параметрическая. Поскольку ![]() , из выражения (1.36) следует
, из выражения (1.36) следует
![]() . (1.37)
. (1.37)
Таким образом, в случае устойчивости замкнутой системы процессы в ней будут сходиться к точке равновесия, которая является точкой экстремума. Устойчивость движения в замкнутой системе можно обеспечить соответствующим выбором коэффициента усиления ![]() , при этом выход на экстремум происходит автоматически. В некоторых случаях с помощью коэффициента
, при этом выход на экстремум происходит автоматически. В некоторых случаях с помощью коэффициента ![]() кроме устойчивости можно обеспечить определённую длительность переходного процесса в замкнутой системе, т. е. заданное время выхода на экстремум.
кроме устойчивости можно обеспечить определённую длительность переходного процесса в замкнутой системе, т. е. заданное время выхода на экстремум.
Пример 1.1
Для объекта, уравнения которого имеют вид

необходимо обеспечить выход на экстремум за заданное время ![]() .
.
В соответствии с (1.34) управление формируется в виде
![]() .
.
Так как для объекта известно уравнение статической экстремальной характеристики, то градиент можно определить аналитически,
 ,
,
и организовать алгоритм управления в виде
 .
.
В этом случае уравнение замкнутой системы будет следующим:
![]() .
.
Получили линейную систему первого порядка, для которой исходя из условия устойчивости корень характеристического уравнения  должен быть отрицательным. Следовательно, необходимо выбирать
должен быть отрицательным. Следовательно, необходимо выбирать
![]() .
.
Учитывая требования ко времени переходного процесса, определим расстояние, ближе которого к мнимой оси этот корень не может располагаться, т. е. ![]() . Отсюда
. Отсюда
![]() .
.
Выбираем ![]() , при этом алгоритм управления, обеспечивающий выполнение заданных требований, принимает вид
, при этом алгоритм управления, обеспечивающий выполнение заданных требований, принимает вид
 .
.
Структурная схема системы с рассчитанным законом управления представлена на рис. 1.14.
Рис. 1.14. Структурная схема синтезированной системы |
1.7.3. Метод "тяжелого шарика"
Рассмотренный в разделе 1.7.2 метод позволяет автоматически найти экстремум, в окрестности которого заданы начальные условия. Если экстремальная характеристика помимо глобального имеет также и несколько локальных экстремумов, то система может остановиться в любом из них.
По аналогии с тяжелым шариком, который скатывается в овраг, проскакивая локальные экстремумы, данный метод предполагает введение в систему дополнительной инерционности для придания процессам колебательного характера, что позволяет "проскакивать" точки локальных экстремумов.
Будем рассматривать объект, поведение которого описывают уравнения (1.33). Для придания процессам колебательного характера добавим в обратную связь апериодическое звено с постоянной времени T, которую и определим в процессе синтеза.
Расчетная структурная схема такой системы приведена на рис. 1.15.
Рис. 1.15. Структурная схема системы с дополнительной инерционностью |
Запишем операторное уравнение замкнутой системы, предполагая, что с помощью соответствующего блока градиент можно оценить точно:
 , (1.38)
, (1.38)
где  , так как экстремальная характеристика описывается уравнением
, так как экстремальная характеристика описывается уравнением  .
.
Преобразуем уравнение (1.38) к виду
![]() ,
,
которое затем представим в стандартной форме
![]() . (1.39)
. (1.39)
Отсюда следует, что, выбирая ![]() , можно обеспечить устойчивость системы (1.39), уравнение статики которой имеет вид
, можно обеспечить устойчивость системы (1.39), уравнение статики которой имеет вид
![]() . (1.40)
. (1.40)
Таким образом, точка равновесия ![]() эквивалентна точке экстремума, так как при этом
эквивалентна точке экстремума, так как при этом  .
.
Характер движения системы к точке экстремума определяется характеристическим уравнением
![]() . (1.41)
. (1.41)
Выбирая распределение корней из условия обеспечения требуемых показателей качества процесса выхода на экстремум (![]() и
и ![]() ), сформируем желаемое характеристическое уравнение второго порядка. Приравнивая коэффициенты при соответствующих степенях оператора p этих двух уравнений (согласно методике модального метода синтеза), определим численные значения k и T.
), сформируем желаемое характеристическое уравнение второго порядка. Приравнивая коэффициенты при соответствующих степенях оператора p этих двух уравнений (согласно методике модального метода синтеза), определим численные значения k и T.
1.7.4. Одноканальные системы общего вида
Рассмотрим экстремальные объекты управления произвольного порядка, которые описываются нелинейным нестационарным дифференциальным уравнением
 (1.42)
(1.42)
Предполагается, что дрейф экстремума медленный, т. е.  , В этом случае градиент определяется соотношением
, В этом случае градиент определяется соотношением
 .
.
Сформируем снова пропорциональный градиенту закон управления,
![]() , (1.43)
, (1.43)
и рассмотрим поведение замкнутой системы
![]() . (1.44)
. (1.44)
Обеспечивать устойчивость замкнутой системы необходимо с помощью коэффициента усиления ![]() . Так как система (1.44) нелинейная, для анализа устойчивости можно использовать второй метод Ляпунова, на основе которого определяется коэффициент
. Так как система (1.44) нелинейная, для анализа устойчивости можно использовать второй метод Ляпунова, на основе которого определяется коэффициент ![]() . Однако второй метод Ляпунова даёт лишь достаточное условие устойчивости, т. е. выбранная функция Ляпунова может оказаться неудачной, поэтому регулярную процедуру расчёта регулятора здесь предложить нельзя.
. Однако второй метод Ляпунова даёт лишь достаточное условие устойчивости, т. е. выбранная функция Ляпунова может оказаться неудачной, поэтому регулярную процедуру расчёта регулятора здесь предложить нельзя.
1.7.5. Градиентные системы с вектором скорости в управлении
Способ синтеза экстремальной системы основан на использовании в законе управления действительной и желаемой старшей производной выходной переменной динамической части системы (или вектора скорости в общем случае) аналогично способу управления нелинейными нестационарными объектами [5, 6].
Будем рассматривать объект управления (1.42), описанный в переменных состояния:
 (1.45)
(1.45)
Здесь ![]() – функция, которая допускает многократное дифференцирование; дрейф экстремума - достаточно медленный.
– функция, которая допускает многократное дифференцирование; дрейф экстремума - достаточно медленный.
Цель управления заключается в определении такого управляющего воздействия u = u(×), которое обеспечивает выполнение условия (1.10)
lim y(t) = yo при t ® ¥
с заданной точностью![]()
Наряду с условием статики предъявляются требования и к динамике, т. е. к характеру переходных процессов, в виде оценок
![]() и
и ![]() %
%![]() % .
% .
Для формирования алгоритма управления необходимо предварительно определить производную выходных переменных динамической части объекта, которая непосредственно зависит от управления. При этом обозначим через C вектор-строку производных
 ,
, ![]() .
.
Исследуем ситуацию, когда
![]() (1.46)
(1.46)
В этом случае от управляющего воздействия явно будет зависеть первая производная выходных переменных динамической части объекта
![]() , (1.47)
, (1.47)
поэтому требования к поведению замкнутой системы следует формировать относительно нее в виде желаемого дифференциального уравнения
![]() , (1.48)
, (1.48)
где a - коэффициент, который выбирается из условия требуемого времени выхода на экстремум. Причем для большого класса объектов типа (1.45) желаемое дифференциальное уравнение можно конструировать в классе линейных уравнений, формируя определенное распределение корней аналогично модальному методу синтеза [7].
В статике желаемое уравнение (1.48) вырождается в условие
![]() ,
,
что соответствует точке экстремума.
Сформируем закон управления на основе метода вектора скорости в виде
![]() , (1.49)
, (1.49)
где K - коэффициент усиления регулятора.
Использование ![]() в алгоритме управления (1.49) позволяет парировать влияние динамической части объекта и действующих на него возмущений, а наличие градиента – организовывать движение к точке экстремума, соответствующей точке равновесия замкнутой системы.
в алгоритме управления (1.49) позволяет парировать влияние динамической части объекта и действующих на него возмущений, а наличие градиента – организовывать движение к точке экстремума, соответствующей точке равновесия замкнутой системы.
Подставив (1.49) в (1.47), получим уравнение динамики для выходной переменной замкнутой системы
![]() , (1.50)
, (1.50)
которое преобразуется к виду
![]() .
.
При условии, что ![]() , получим уравнение замкнутой системы
, получим уравнение замкнутой системы
![]() . (1.51)
. (1.51)
При увеличении коэффициента К начиная с некоторых значений выполняется условие  и уравнение (1.51) при условии, что
и уравнение (1.51) при условии, что ![]() , вырождается в следующее уравнение:
, вырождается в следующее уравнение:
![]() (1.52)
(1.52)
Первым слагаемым в уравнении (1.52) при ![]() можно пренебречь и записать его в виде:
можно пренебречь и записать его в виде:
![]() .
.
Таким образом, соответствующий выбор коэффициента усиления регулятора позволяет с заданной точностью обеспечить в замкнутой системе желаемую динамику выхода на экстремум. Параметры регулятора выбираются из соотношения [6]
![]() . (1.53)
. (1.53)
В этом случае ошибка поддержания в системе желаемого уравнения не будет превышать%.
Структурная схема системы приведена на рис. 1.16.
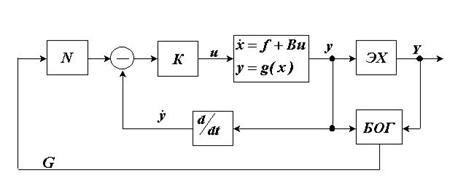
Рис. 1.16. Структурная схема системы со старшей производной
в управлении
В реальной системе для оценки полной производной по времени используется дифференцирующий фильтр, поэтому оценивать градиент удобно с помощью специального фильтра, который называется фильтром оценки частной производной (ФОЧП).
Малые инерционности используемых в системе фильтров могут приводить к возникновению в ней разнотемповых процессов, которые будут различными в зависимости от соотношения постоянных времени ![]() и
и ![]() . При соизмеримых
. При соизмеримых ![]() и
и ![]() в замкнутой системе возникают два вида движений: быстрые и медленные, причем медленные движения соответствует системе с точным законом управления.
в замкнутой системе возникают два вида движений: быстрые и медленные, причем медленные движения соответствует системе с точным законом управления.
Если постоянные времени фильтров различаются на порядок и более, то в системе возникают три вида движений: сверхбыстрые, быстрые и медленные. Сверхбыстрые движения определяются наименьшей постоянной времени фильтров, быстрые движения обусловлены вторым фильтром, а медленные движения, как и в первом случае, соответствуют системе с точным законом управления.
Пример 1.2
Рассмотрим объект управления, который описывается уравнениями
Y=ay2 , y(0)¹0,
где T0=2c, d0=1, k0 = 3, a=1, y(0)=2.
На основании требований к процессу выхода на экстремум в замкнутой системе (tп=5c, s%=20%) формируется желаемое уравнение того же порядка, что и уравнение объекта.
Дальнейший расчет экстремальной системы производим согласно описанному методу синтеза.
Коэффициент усиления регулятора K, численное значение которого определяет точность обеспечения в замкнутой системе желаемых свойств, выбираем равным из условия CBK=20. При этом ошибка поддержания в системе желаемого уравнения не будет превышать 5%.
Для оценки производных используем дифференцирующий фильтр и фильтр оценки частной производной.
На рис. 1.17, 1.18 отображены переходные процессы в системе и изменение градиента при согласованных параметрах дифференцирующего фильтра и фильтра оценки частной производной соответственно.
Структурная схема системы приведена на рис. 1.19.
Рис. 1.17. Переходные процессы в замкнутой системе
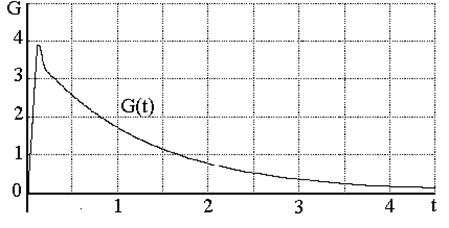
Рис. 1.18. Изменение градиента в системе
Рис. 1.19. Структурная схема реальной замкнутой системы
