
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Создание DEM на базе стерео снимков QuickBird без опорных точек
Использование только связующих точек
В данной статье рассматривается процесс создания DEM на базе стерео пар QuickBird без использования опорных точек (GCP). Поскольку очень часто опорные точки отсутствуют, метод создания DEM, не требующий GCP, заинтересует пользователей, работающих со стерео снимками. Также в статье рассматривается проблема повышения точности полученных DEM с помощью горизонтальных смещений, базирующихся на эталонной DEM, созданной Shuttle Radar Topography Mission (SRTM).
Филип Ченг и Чак Чаапел
Визуализация стерео снимков
Создание цифровых моделей местности (DEM) на базе космических снимков являлось предметом живого научного интереса и разработок на протяжении последних тридцати лет, начиная с запуска первого гражданского спутника, поставляющего данные дистанционного зондирования.
Визуализация стерео снимков стала самым распространенным методом моделирования рельефа, используемым картографами, фотограметристами и специалистами в области дистанционного зондирования.
Существует два метода получения стереоскопических снимков со сканеров спутника: параллельная (along-track) стереоскопия с одной орбиты и поперечная (across-track) стереоскопия с двух соседних орбит.
Сканирование в поперечном направлении широко применялось с 1980г. сначала на спутнике Landsat с двух соседних орбит, затем на SPOT с использованием дополнительных возможностей управления и, наконец, на IRS-1C/D путем «вращения» спутника.
Тем не менее, в последнее время снова стала популярной параллельная стереоскопия. Она применяется на большом количестве спутников, включая JERS-1’s Optical Sensor (OPS), German Modular Opto-Electronic Multi-Spectral Stereo Scanner (MOMS), ASTER, IKONOS, QuickBird, OrbView, SPOT-5, Formosat II и CartoSat. Кроме того, получение стерео снимков вдоль орбиты (along-track) за один прием имеет существенное преимущество в плане радиометрических характеристик в сравнении со стерео снимками, снятыми перпендикулярно орбите (across-track), которые получают в несколько заходов.
Сбор опорных точек (GCP)
Создание DEM на базе стерео снимков обычно предполагает использование геометрической модели и опорных точек (GCP). Сбор опорных точек представляет серьезную проблему в практическом плане, поскольку источник GCP может быть недоступен. Часто сбор новых точек оказывается очень дорогим делом, особенно если речь идет о труднодоступных районах, или когда это невозможно сделать вручную. Такими образом, метод создания DEM без использования опорных точек может заинтересовать пользователей, работающих со стерео снимками.
В данной статье мы рассмотрим автоматическое создание DEM на базе стерео снимков QuickBird без использования опорных точек, а также усовершенствование полученных DEM на базе эталонных DEM, созданных Shuttle Radar Topography Mission (SRTM).
Спутник QuickBird
С момента запуска компанией DigitalGlobe спутника QuickBird снимки QuickBird быстро приобрели популярность и стали использоваться в крупномасштабных картографических проектах, в которых требуются снимки высокого разрешения. Спутник оснащен панхроматическими и мульти-спектральными датчиками с разрешением 61-72см и 2.44-2.88м, которое определяется углом отклонения от надира (0-25°). Поэтому в поперечном направлении датчик охватывает 16.5-19км. Кроме того, возможности сканирования в параллельном и поперечном направлении обеспечивают хорошую стерео геометрию и высокую частоту повторной съемки 1-3.5 дня.
Для корректировки данных QuickBird используется одна из двух геометрических моделей: строгая модель и модель коэффициентов рациональных полиномов (RPC). Поскольку в наборах данных, используемых в этом исследовании, не было опорных точек, то был выбран метод RPC. Этот метод работает и без GCP, хотя точность снижается по причине наличия не откорректированных отклонений и погрешностей RPC.
Возврат к методу RPC
В методе RPC используется эмпирическая/статистическая модель, разработанная специалистами компании DigitalGlobe, и приближающаяся по своим параметрам к трехмерной физической сенсорной модели QuickBird. Используемый периодически в 1980-е г. г., этот метод снова привлек к себе внимание после запуска компанией Space Imaging спутника IKONOS, поскольку параметры его датчиков и орбиты не включены в метаданные снимков. Метод RPC позволяет отказаться от создания трехмерных физических моделей, поскольку пользователи, мало знакомые с датчиком QuickBird, могут выполнять геометрическую корректировку без опорных точек (GCP); в этом случае необходима только цифровая модель местности (DEM).
Так как при использовании метода RPC тоже возникают отклонения или погрешности, полученные результаты могут пройти последующую уточненную обработку с использованием нескольких точных GCP. В качестве альтернативы для корректировки исходных RPC-параметров можно использовать линейные уравнения и точные GCP. Ряд недавно опубликованных статей и докладов, посвященных снимкам IKONOS, подтвердил хорошие результаты одновременного использования модели RPC и нескольких опорных точек GCP для дополнительной полиномиальной корректировки нулевого порядка снимков этого типа. Более подробную информацию о методе RPC можно найти в статье Grodecki и Dial (PE & RS January, 2003).
Автоматическое создание DEM
В этой статье приводятся результаты тестирования программного обеспечения OrthoEngine v10.0, разработанного специалистами компании PCI Geomatics. В этой программе возможно чтение данных, сбор GCP/связующих точек (TP) в ручном и автоматическом режиме и геометрическое моделирование с использованием данных различных спутников (используется точный метод Toutin или RPC-метод). Также можно автоматически создавать и редактировать DEM, проводить орто корректировку и осуществлять ручное или автоматическое мозаикирование. В основе RPC-метода программы OrthoEngine лежит метод блочного уравнивания, разработанный Grodecki и Dial и сертифицированный компанией Space Imaging
(www. /support_center/tech_papers/rpc_pci_cert. pdf).
С помощью этого метода рассчитывается математическая модель полиномиальной корректировки для каждого снимка.


Ao, AS, AL, ASL … и Bo, BS, BL, BSL … параметры корректировки снимков.
Line и Sample – линейные координаты точек снимка.
∆P и ∆R – корректируемые функции, выражающие разницу между полученными и номинальными линейными координатами.
Для снимков IKONOS в большинстве случаев подходит полиномиальная корректировка нулевого порядка (Ao и Bo). Чтобы получить наилучшие результаты для снимков QuickBird, необходимо использовать полиномиальную корректировку первого порядка. В программе OrthoEngine можно проводит полиномиальную корректировку нулевого и первого порядка по методу RPC.
Модель связки блоков по методу RPC
Чтобы создать DEM на базе стерео пары, сначала в программе OrthoEngine автоматически собирают связующие точки. Для каждого снимка рассчитывается модель связки блоков по методу RPC. На базе стерео снимков создается пара псевдоэпиполярных изображений, чтобы удержать параллакс высоты в направлении Х. Затем для создания DEM применяется автоматическая корреляция снимков, которая заключается в сравнении соответствующих показателей «серого» этих изображений. Для нахождения соответствующих пикселей в левом и правом псевдоэпиполярных снимках данная процедура предполагает использование иерархического метода согласования нормализованной взаимной корреляции средних значений суб-пикселей.
Используемый в настоящее время метод согласования дает коэффициенты корреляции от 0 до 1 для каждого согласованного пикселя. При этом 0 указывает на полное несоответствие, а 1 – на совершенное сочетание. Поверхность второго порядка затем подгоняется под максимальные значения коэффициентов корреляции, чтобы найти позицию соответствия для суб-пиксельной точности.
Разница в местоположении точек на снимках дает несоответствие или параллакс, причиной которого является рельеф местности. Затем он конвертируется в абсолютные высотные показатели над эллипсоидом WGS84 с использованием трехмерного пространственного пересечения.
Стерео снимки QuickBird
В данном исследовании использовали три стерео пары QuickBird, сканированные в параллельном направлении (along-track). Первая стерео пара, полученная 27 мая 2005 года, отображает территорию Ливии, Африка, см. рисунки 1 и 2. Вторая пара, полученная 7 октября 2005 года, охватывает территорию Монголии, Азия, см. рисунки 3 и 4. Эта территория включает равнину и гористые участки с диапазоном высот от 1200м до 1400м. Третья пара, полученная 22 января 2005 года, охватывает территорию штата Юта, США, см. рисунки 5 и 6. Диапазон высот на этой территории составляет от 2000м до 3300м. На этих снимках отображены снег, деревья и скалистые горы.
В данном случае мы располагаем двумя видам снимков для создания DEM: панхроматические и мульти-спектральные стерео пары. Выбор был сделан в пользу мульти-спектральной стерео пары, поскольку она содержит меньшее количество мелких объектов (таких как деревья), что сокращает помехи в конечной DEM. Все созданные DEM имели разрешение 5м и были конвертированы в средние высоты по отношению к уровню моря.
Международный проект
Для анализа точности полученных DEM в качестве эталона использовались цифровые модели местности SRTM 3 arc-sec. SRTM – это международный проект, возглавляемый Национальным разведывательным агентством геопространственных данных (NGA) и Национальным агентством по аэронафтике и космосу (NASA). Ключевой технологией программы стала специально модифицированная радарная система, действовавшая на борту Space Shuttle Endeavour в течение 11 дней в феврале 2000г. Были получены данные высот (elevation data) в масштабе, близком к земному (near-global), которые станут частью наиболее полной цифровой топографической базы данных о Земле, имеющих высокое разрешение. Согласно договору, заключенному между NGA и NASA и касающемуся распределения данных, данные с разрешением 3 arc-sec (~ 90м) должны быть доступны пользователям за пределами территории США. На территории США доступны данные с полным разрешением 1 arc-sec (~ 30м).
Поскольку для каждой стерео пары можно было собрать только связующие точки, то горизонтальные координаты полученных DEM будут включать ошибки, обусловленные неисправленными отклонениями и погрешностями RPC. Эти погрешности можно снизить, сравнив одинаковые объекты на полученной DEM и SRTM DEM и внеся поправки по осям X и Y в полученную DEM, добившись совпадения с горизонтальными координатами SRTM DEM.
Заключение
Данное исследование доказало, что возможно создание DEM на базе стерео снимков QuickBird только по связующим точкам, без опорных точек (GCP). Плановую точность созданной DEM можно повысить, если сравнить одинаковые объекты на полученной DEM и SRTM DEM, а затем внести поправки по осям X и Y в полученную DEM, добившись совпадения с горизонтальными координатами SRTM DEM. Для разных типов равнинного рельефа разница показателей высотной точности полученной DEM и SRTM DEM в среднем составила 3м, для горного рельефа – 30м.
Благодарность
Авторы выражают благодарность компании DigitalGlobe за предоставленные стерео снимки и компании PCI Geomatics за предоставленное программное обеспечение и оказанную поддержку.
Доктор Филип Ченг (*****@***com) – старший научный консультант, компания PCI Geomatics. Г-н Чак Чаапел (*****@***com) – специалист по разработке ГИС, компания DigitalGlobe.
DEM, созданная на базе снимков территории Ливии
На рисунках 1a, 1b и 1c представлены соответственно орто откорректированный мульти-спектральный снимок QuickBird, полученная DEM и SRTM 3 arc-sec DEM. Созданная DEM почти не нуждалась в DEM-редактировании. Поправки: 44м по оси Х и 60м по оси Y были внесены в полученную DEM, чтобы добиться совпадения с горизонтальными координатами SRTM DEM. После внесения поправок разница высотной точности полученной DEM и SRTM DEM составила в среднем около 3м.
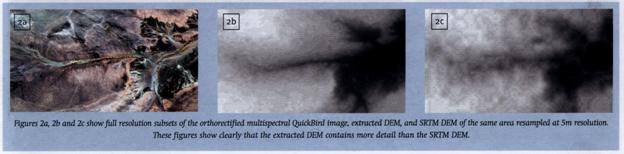
На рисунках 2a, 2b и 2c представлены фрагменты с максимальным разрешением орто откорректированного мульти-спектрального снимка QuickBird, полученной DEM и SRTM DEM той же территории с разрешением 5м. На рисунках ясно видно, что полученная DEM более детализирована, чем SRTM DEM.
DEM, созданная на базе снимков территории Монголии
На рисунках 3a, 3b и 3c представлены соответственно орто откорректированный мульти-спектральный снимок QuickBird, полученная DEM и SRTM 3 arc-sec DEM. Созданная DEM почти не нуждалась в DEM-редактировании. Поправки: 15м по оси Х и 20м по оси Y были внесены в полученную DEM, чтобы добиться совпадения с горизонтальными координатами SRTM DEM. После внесения поправок разница высотной точности полученной DEM и SRTM DEM составила в среднем около 3м.
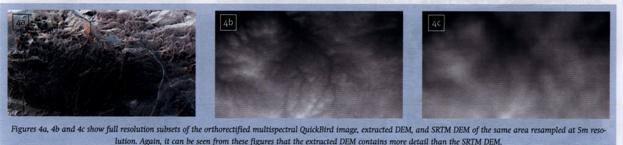
На рисунках 4a, 4b и 4c представлены фрагменты с максимальным разрешением орто откорректированного мульти-спектрального изображения QuickBird, полученной DEM и SRTM DEM той же территории с разрешением 5м. На рисунках ясно видно, что полученная DEM более детализирована, чем SRTM DEM.
DEM, созданная на базе снимков территории штата Юта
Работа с этими снимками была наиболее сложной, так как на снимке штата Юта отображены снег, деревья и скалистые горы. Созданная DEM нуждалась в существенном редактировании. На рисунках 5a, 5b и 5c представлены соответственно орто откорректированный мульти-спектральный снимок, полученная DEM и SRTM DEM. Поправки: 10м по оси Х и 60м по оси Y были внесены в полученную DEM, чтобы добиться совпадения с горизонтальными координатами SRTM DEM. После внесения поправок разница высотной точности полученной DEM и SRTM DEM составила в среднем около 30м.
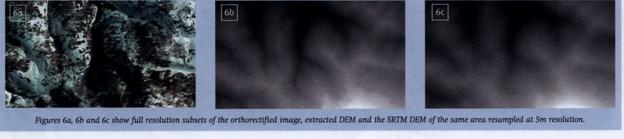
На рисунках 6a, 6b и 6c представлены фрагменты с максимальным разрешением орто откорректированного изображения, полученной DEM и SRTM DEM той же территории с разрешением 5м.
