
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
СТАВРОПОЛЬСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ
ЗАДАНИЯ ДЛЯ РАСЧЕТНО-ГРАФИЧЕСКОЙ РАБОТЫ №1
на тему: «ПРОИЗВОЛЬНАЯ ПЛОСКАЯ СИСТЕМА СИЛ»
Методические указания
Ставрополь
2011
 УДК 531/534 ББК 22
УДК 531/534 ББК 22
Составители:
, ,
Произвольная плоская система сил: методические указания / , , . - Ставрополь: АГРУС, 2011. - … с.
В методических указаниях даны понятия проекции силы на ось, момента силы относительно центра, приведения произвольной плоской системы сил к заданному центру. условия равновесия произвольной плоской системы сил, необходимые формулы для их расчета, задания и общие требования к выполнению самостоятельной работы, пример выполнения задания.
Предназначены для студентов специальностей: 110301.65 — Механизация сельского хозяйства; 190603.65 — Сервис транспортных и технологических машин и оборудования в АПК; 110302.65 — Электрификация сельского хозяйства, 140211.65 — Электроснабжение,110300.62 — Агроинженерия, 140600.62 — Электротехника, 260204.65 - Технология бродильных производств и виноделие.
УДК 531/534 ББК 22.21
Утверждены к изданию методическим советом СтГАУ (протокол № от 2011 г.)
© Составители, 2011 © АГРУС, 2011
1. Основные понятия.
1.1 Проекция сил на ось.
Проекцией силы на ось называется скалярная величина, равная длине отрезка, заключенного между проекциями начала и конца силы.
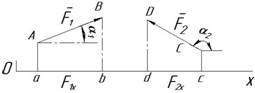 |
Рис.1.
F1x= ab = F1 · cos α1 ; F2x= -dc = F2 · cos α2 ; (1)
Т. е. проекция силы на ось равна произведению модуля силы на косинус угла между направлением силы и положительным направ-лением оси. Если α< 90°, проекция силы на ось положительна, если α >90° отрицательна, если α = 90° - равна нулю.
1.2. Момент силы относительно центра. Пара сил.
Рассмотрим силу F, приложенную к телу в точке А (рис. 2). Из некоторого центра О опустим перпендикуляр на линию действия силы F; длину h этого перпендикуляра называют плечом силы F
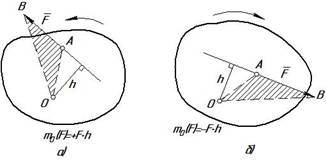
Рис.2
Тогда моментом силы F относительно центра О называется величина, равная взятому с соответствующим знаком произведению модуля силы F на длину плеча h.
Момент силы F относительно центра О обозначается символом ![]() . В этом случае формулу для определения момента можно записать в следующем виде:
. В этом случае формулу для определения момента можно записать в следующем виде:
 (2)
(2)
Момент имеет знак плюс, если сила стремится повернуть тело вокруг центра О против хода часовой стрелки(рис.2.а), знак минус, если по ходу часовой стрелки (рис.2.б).
Парой сил называется система двух равных по модулю, параллель -
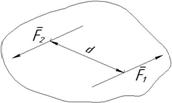 ных и направленных в противополож -
ных и направленных в противополож -
ные стороны сил (рис.3).
Действие пары сил на твердое
тело сводится к некоторому
вращательному эффекту, который
характеризуется моментом пары:
m = ± F · d, (3)
Рис.3. где d - плечо пары.
 1.3. Приведение плоской системы сил к простейшему виду.
1.3. Приведение плоской системы сил к простейшему виду.
Чтобы произвольную плоскую систему упростить необходимо все силы этой системы свести в одну точку.
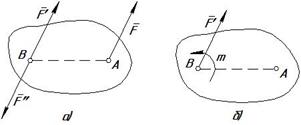
Рис. 6
Рис.4.
Это осуществляется с применением теоремы о параллельном переносе силы: силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого ею действия, переносить из данной точки А в любую другую точку В тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки В, куда сила переносится (рис. 4.б).
![]() (4)
(4)
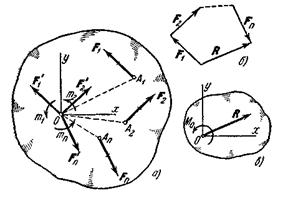
Тогда все силы произвольной плоской системы сил, действующей на твердое тело (рис.7.а) снесем в центр О, присоединяя при этом соответствующие пары. Сходящиеся силы, приложенные в точке О, заменяются одной силой R, приложенной в точке О. При этом
![]() (5)
(5)
Рис. 5
Все полученные пары заменяются одной парой, момент которой равен:
![]() (6)
(6)
Как известно, величина R, равная геометрической сумме всех сил, называется главным вектором системы сил; величина М0, равная алгебраической сумме моментов всех сил относительно центра О, называется главным моментом системы сил относительно этого центра.
Таким образом, любая система сил, действующих на абсолютно твердое тело, при приведении к произвольно выбранному центру О заменяется одной силой R, равной главному вектору системы сил и приложенной в центре приведения О, и одной парой с моментом МО, равным главному моменту системы сил относительно центра О (рис. 5, в).
1.4 .Равновесие произвольной плоской системы сил.
Для равновесия любой плоской системы сил необходимо и достаточно, чтобы одновременно выполнялись условия:
![]() (7) Здесь О – любая точка плоскости, так как при
(7) Здесь О – любая точка плоскости, так как при ![]() величина МО от выбора центра О не зависит.
величина МО от выбора центра О не зависит.
Условия (11) можно выразить в трех различных формах:
а) Основная форма условий равновесия: для равновесия произ-вольной плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра, лежащего в плоскости действия сил, были равны нулю.
![]() (8)
(8)
б) Вторая форма условий равновесия: для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы момен-тов всех этих сил относительно каких-нибудь двух центров А и В и сумма их проекций на ось Ох, не перпендикулярную прямой АВ, были равны нулю:
 (9)
(9)
в) Третья форма условий равновесия (уравнения трех моментов): для равновесия произвольной плоской системы сил необходимо и достаточно, чтобы суммы моментов всех этих сил относительно любых трех центров А, В к С, не лежащих на одной прямой, были равны нулю:
![]() (10)
(10)
2. Контрольные задания.
2.1. Требования и порядок выполнения заданий.
Расчетно-пояснительная записка выполняется на листах формата А4 (210 х 297 ) ГОСТ 2.301-68, должна иметь титульный лист, исходные данные, расчетную часть и список использованной литературы. Объем записки может составлять 4…5 страниц. Листы записки должны иметь основную надпись для текстовых и конструкторских документов по форме 2 и 2а ГОСТ
Рисунки, сопровождающие решения заданий, должны быть аккуратными, наглядными и выполняться с использованием чертежных инструментов.
Варианты заданий студентам выдаются преподавателем.
2.2. Условия и варианты заданий.
ЗАДАНИЕ: « Определение реакций опор составной
конструкции».
Конструкция состоит из двух частей. Установить, при каком способе соединения двух частей конструкции модуль реакции, указанный на рис. 6.0 – 6.9, НАИМЕНЬШИЙ, и для этого варианта конструкции определить реакции опор и соединения С.
На рис.6.0 – 6.9 показан первый способ соединения С – с по-
мощью шарнира. Второй способ соединения – с помощью скользящей заделки, показан в табл. 2.
ТАБЛИЦА 1 ТАБЛИЦА 2
Номер условия | F1 | F2 | М | q |
| Номеррисунка | Вид скользящей заделки |
|
kH |
kH |
kH м |
kH/м |
| ||||
0 1 | 5 6 | 7 10 | 24 22 | 1 12 |
| 0, 1, 2
|
|
|
2 3 | 7 8 | 9 7 | 20 18 | 14 16 | 3 |
|
| |
4 5 | 9 10 | 6 8 | 16 25 | 18 2 | 4 |
|
| |
6 7 | 11 12 | 7 6 | 20 15 | 2 22 | 5, 6, 7 |
|
| |
8 9 | 13 14 | 9 8 | 17 20 | 3 2 | 8 |
|
| |
| 9 |
|
| |||||
|
Рис. 6.0 |
Рис. 6.1 |
| |||||
|
Рис. 6.2
|
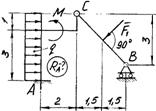
Рис. 6.3 | ||||||
|
|
| ||||||
| Рис. 6.6 |
Рис. 6.7 | ||||||
|
Рис. 2.8 |
Рис. 2.9 | ||||||
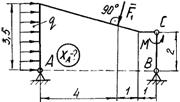
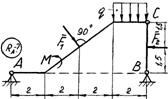
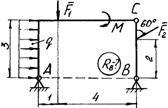
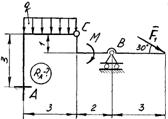
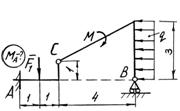
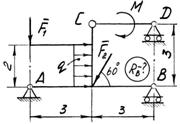 Рис. 6.4
Рис. 6.4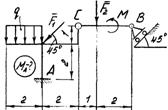
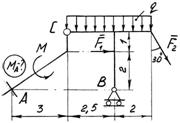 Рис. 6.5
Рис. 6.5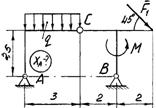
3. Пример.
Определение реакций опор составной конструкции.
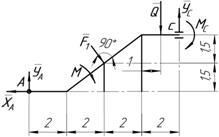
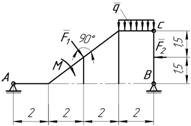 Конструкция состоит из двух частей. Установить, при каком способе соединения С двух частей конструкции модуль реакции, указанный на рисунке в задании, НАИМЕНЬШИЙ, и для этого варианта конструкции определить реакции опор и соединения С. На рисунке в дано показан первый способ соединения С – с помощью шарнира. Второй способ соединения – с помощью скользящей заделки, буден показан при решении задания.
Конструкция состоит из двух частей. Установить, при каком способе соединения С двух частей конструкции модуль реакции, указанный на рисунке в задании, НАИМЕНЬШИЙ, и для этого варианта конструкции определить реакции опор и соединения С. На рисунке в дано показан первый способ соединения С – с помощью шарнира. Второй способ соединения – с помощью скользящей заделки, буден показан при решении задания.
Дано:
F1=5 кН,
F2= 7 кН,
М=24 кН ∙м,
q =1кН/м,
Исследуемая реакция - RA min.
______________
Найти: XA, YA, RA, XB, YB, XC ,YC.
Рис.7.
Решение:
1. Определим RA при шарнирном соединении в точке С.
Рассмотрим уравновешенную систему сил, приложенную ко
всей конструкции.
Составим уравнение моментов сил относительно точки B.
 |
 |
а) б)
Рис.8.
åmB (F ) = 0,
где Q= 1 ∙2=1∙2=2 кН,
sin α =0,8, cos α =0,6.
Q ∙1 + F2 ∙1,5 - F1 ∙cos ∙1,5 + F1 ∙ sin α ∙4 + M - YA ∙ 8 =0, (1)
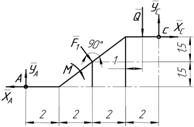
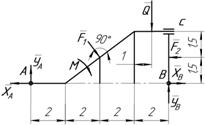
Рассмотрев систему уравновешивающихся сил, приложенных к части конструкции, расположенной левее шарнира С (рис.8.б),
составим уравнение моментов относительно точки С:
åmС (F ) = 0,
Q ∙1 +F1 ∙ sin α ∙4+ F1 ∙ cos α ∙1,5+ М - XA ∙3 - YA ∙8 = 0. (2)
Решая систему уравнений (1) и (2), находим RA :
![]() кН.
кН.
2. Рассмотрим второй вариант расчетной схемы при соединении частей конструкции в точке С скользящей заделкой.
Схема системы сил, действующих на всю конструкцию не зависит
от варианта соединения в точке С. Поэтому уравнение (1) соответ-
ствует и для конструкции со вторым вариантом соединения.
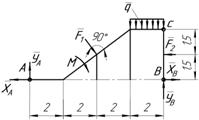
Для получения второго уравнения рассмотрим систему уравновеши-вающихся сил, приложенных к части конструкции, расположенной левее скользящей заделки (рис.9.б).
 |
 |
а) б)
Рис.9.
Составим уравнение равновесия:
åFkx= 0, -XA + F1 ∙ cos α = 0, (3)
получим
XA =- F1∙cos α= -5∙0,6 =-3 кН.
Найдем величину RА при скользящей заделки в точке С.
![]() кН.
кН.
Итак, при шарнирном соединении в точке С модуль RA меньше, чем при скользящей заделки. Теперь найдем остальные реакции опор для случая шарнирного соединения в (∙) С.
3. Определим реакции XВ, YВ, XC и YC при шарнирном соединении в точке С.
Рассмотрим систему уравновешивающихся сил, приложенных ко всей конструкции, и составим два уравнения равновесия:
åF = 0, - XA + F1 ∙ cos α - F2 + XB = 0, (4)
åF![]() = 0, YA + YB - F1 ∙ sin α - Q = 0. (5)
= 0, YA + YB - F1 ∙ sin α - Q = 0. (5)
Получим
XB = XA - F1 ∙ cos α + F2 = - 0,5 + 7 – 5 ∙0,6 =3,5 кН,
YB = - YA + F1 ∙ sin α + Q = - 6 + 5 ∙0,8 + 1 = -1 кН.
Найдем составляющие реакции шарнира С из уравнений равновесия для правой от точки С части конструкции. Составим два уравнения равновесия:
åF![]() = 0, XC + X
= 0, XC + X![]() - F2 = 0; (6)
- F2 = 0; (6)
åF![]() = 0, YC - YB = 0. (7)
= 0, YC - YB = 0. (7)
Решим уравнения (4) и (5)
XC = - X![]() + F2 = - 3,5 + 7 = 3,5 кН,
+ F2 = - 3,5 + 7 = 3,5 кН,
YC = YB = -1 кН.
Результаты расчета сводим в таблицу 3.
Таблица 3.
Силы, кН | |||||||
XA | YA | RA | XC | YC | XB | YB | |
Для шарнирного соединения в точке С | -0,5 | 6 | 6,02 | 3,5 | -1 | 3,5 | -1 |
Для скользящей заделке в точке С | -3 | 6 | 6,7 |
Библиографический список
Основной:
1. , Курс теоретической механики. Учеб. пособие для вузов: 13-е изд., исправ.-М.: Интеграл-Пресс,2006.-603с.
2. Тарг курс теоретической механики: Учеб. для втузов/.-15-е изд.,стер.-М.:Высш. шк.,2005.-415 с.
3. и др. Курс теоретической механики: Учеб. пособие для студ-ов вузов по техн. спец.:В 2-х т./, Я.Л. Лунц, Д.Р. Меркин. СПб.:Лань.-5-е изд.,испр.-1998.-729 с.
4. Мещерский по теоретической механике: Учеб. пособие для студ. вузов, обуч. по техн. спец./; Под ред. В.А. Пальмова, Д.Д. Меркина.-45-е изд.,стер.-СПб. и др.:Лань,2006.-447 с.
5. Сборник заданий для курсовых работ по теоретической механике: Учеб. пособие для студ. втузов/[, , С.А. Вольфсон и др.];Под общ. ред. .- 11-е изд.,стер.-М.:Интеграл - Пресс,2004.-382 с.
6. И и др. Теоретическая механика в примерах и задачах. Учеб. пособ. для вузов. В 2-х т./, , .-9-е изд., перераб.-М.:Наука,1990.-670 с.
7. Теоретическая механика. Терминология. Буквенные обозначения величин: Сборник рекомендуемых терминов. Вып. 102. М.: Наука, 1984. – 48с.
Дополнительный:
1. Теоретическая механика: Сб. научно-метод. ст./М-во образования РФ. Научно-метод. совет по теорет. механике. Моск. гос. ун-т им. М.В. Ломоносова, Ин-т механики; Под ред. . - М.:Изд-во МГУ.-Вып.25.-2004.-213 с.
2. Курс теоретической механики: Учебник для вузов по направлению подгот. дипломир. специалистов в области техники и технологии/ [ , , М.М., Ильин и др.];Под ред. К.С. Колесникова.-3-е изд.,стер. М. : Изд - во МГТУ им. ,2005.-735 с.- (Механика в техническом университете:В 8 т.;Т.1)
3. и др. Теоретическая механика. Динамика:Учеб. для втузов/, , ; Под общ. ред. М.А. Павловского.- Киев:Выща. шк.,1990.-479 c.
4. Цывильский механика: Учебник для втузов.-М.:Высшая школа,2001.-318 с.
5. Сборник коротких задач по теоретической механики. Под ред. . М.:Высшая школа, 1983.-368 с.
Оглавление
1. Основные понятия ……………………………………………….3
1.1. Проекция сил на ось……………………………..………………3
1.2. Момент силы относительно центра. Пара сил………………...3
1.3. Приведение плоской системы сил к простейшему виду….…..4
1.4 .Равновесие произвольной плоской системы сил……………...6
2. Контрольные задания..…………………………………………...7
2.1. Требования и порядок выполнения заданий…………………..7
2.2. Условия и варианты заданий………………………………..….7
3. Пример……………………………………………………………..9
Библиографический список………………………………………..12
