

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Научно-образовательный материал
АСР ТЕМПЕРАТУРЫ ЭЛЕКТРОНАГРЕВАТЕЛЯ С ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ПОСТОЯННОЙ СКОРОСТИ
Автор: ,
Аннотация
Данный научно-образовательный материал посвящен изучению АСР температуры электронагревателя с исполнительным механизмом постоянной скорости на базе микропроцессорного контроллера ПЛК 150. Занятие рассчитано на 4 часа плюс два часа домашней подготовки.
При выполнении заданий обучающиеся получают навыки по программированию контроллера (на примере ПЛК 150) в среде CoDeSys, настройке регулятора (с ПИ-алгоритмом) и проведению испытаний системы регулирования, а также по изучению особенностей работы АСР с исполнительным механизмом постоянной скорости.
Структурная схема АСР с позиционером представлена на рис. 1. По отношение к скважности импульсов исполнительный механизм постоянной скорости представляет собой интегрирующее звено, с помощью которого реализована его модель, входящая в состав позиционера.
|
Рис. 1. Система регулирования с позиционером.
Позиционер представляет собой последовательно соединенные трехпозиционное реле и интегратор. На вход реле приходит сигнал рассогласования между выходом алгоритма регулирования (на рисунке – ПИД) и выходом интегратора. С выхода реле сигнал подается на модель исполнительного механизма (интегратор) и на реальный исполнительный механизм.
В динамику рассматриваемой АСР (как и любой другой АСР) вносят свой вклад, не только динамика объекта и алгоритма регулирования, но также динамика исполнительного механизма и других частей системы.
Пример визуализации, применяемой при решении данной задачи представлен на рис. 2. Предусматривается возможность изменения задания и настроек ПИ-алгоритма через визуализацию. На график-тренд выводятся задание (кривая 2), значение температуры электронагрева, выход модели исполнительного механизма в виде интегратора (4) и положение регулирующего органа (3).
|
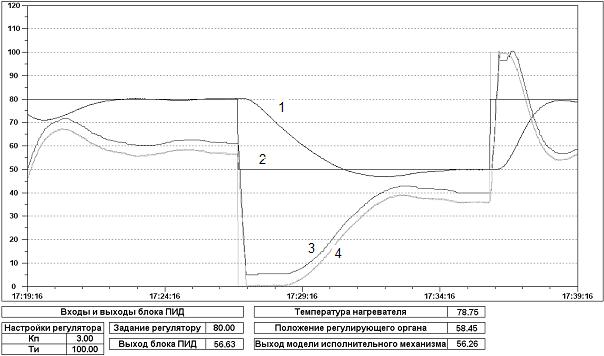
Рис. 2. Пример основной визуализации.
При подготовке к занятию необходимо изучить (по [3]), как работает исполнительный механизм постоянной скорости, каковы его характеристики, каким образом строятся АСР с исполнительным механизмом постоянной скорости. Также необходимо рассчитать настройки ПИ-алгоритма регулирования для объекта в виде электронагревателя, находящегося на том же стенде.
Во время занятия обучающиеся экспериментально определяют скорость исполнительного механизма, затем составляют программу на языках ST и FBD, в состав которой входят блок, реализующий идеальный ПИД-алгоритм, модель исполнительного механизма и программно-реализуемый релейный элемент. Далее конфигурируются входы и выходы контроллера, создается визуализация, после чего программа загружается в контроллер и запускается на выполнение.
При проведении эксперимента обучающиеся получают графики переходных процессов в данной АСР при подаче возмущения на вход объекта регулирования и при изменении задания и оценивают качество работы АСР.
