
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ОСОБЕННОСТИ РЕГУЛИРОВАНИЯ В СИСТЕМАХ С
ЗАПОРНЫМИ КЛАПАНАМИ.
, д. т.н. (ГНУ ВИЭСХ)
– Механизация и электрификация сельского хозяйства, 2004, №7, с. 23…24.
Остановимся на аспекте, который редко принимается во внимание. В технологических процессах (отопление, пастеризация, ректификация, промышленные рефрижераторы) основным элементом является насос, подключенный посредством запорного клапана к трубопроводу и калориферам, осуществляющим тепломассообмен. Управление потоком посредством частотного преобразователя не меняет суть процессов.
Системы теплообмена используют или не используют бойлеры для развязки теплоносителей. Соответствующие структурные схемы гидротехнического и измерительного оборудования показаны на Рис. 1.
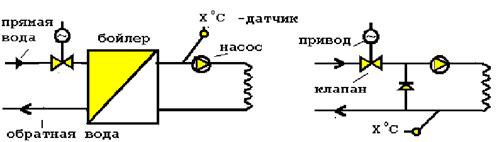 Рис.1. Схемы водяного отопления
Рис.1. Схемы водяного отопления
Данной цепочке соответствует передаточная функция с инерционным звеном второго порядка:
![]() , (1)
, (1)
где Tн – постоянная времени нагрева (Tн = C/k); Xпр – предельная температура до которой может нагреться объект, to - транспортное запаздывание, связанное с конечной скоростью движения теплоносителя - v.
Согласно уравнению Бернулли напор насоса H связан со скоростью:
 , где L - длина, d - диаметр трубопровода
, где L - длина, d - диаметр трубопровода
l - коэффициент трения.
Отсюда  to= L/v (2)
to= L/v (2)
Коэффициент трения связан с диаметром, шероховатостью внутренних стенок трубопровода, его поворотов и разветвлений, а также от размера отверстия клапана. Изменение состояния стенок в процессе эксплуатации приводит к изменению трения на порядок. Запорный клапан изменяет v от 0 до vmax. .
В системах с теплообменником (бойлером), а также в системах с смесительным (3-х ходовым) клапаном регулирование производится по датчику температуры «прямой» воды на выходе теплообменника или клапана. При этом запаздывание to мало и меняется незначительно.
В прямоточных системах отопления с запорным клапаном регулирование производится по датчику температуры «обратной» воды (в этом случае температура прямой воды всегда равна температуре в магистрали). При этом транспортное запаздывание to очень сильно меняется при регулировании, а также в процессе эксплуатации оборудования. Это приводит к необходимости существенного изменения настроек САУ. Это же относится к системам ректификации, так как процесс предусматривает проток сырья и готового продукта. Данный вопрос актуален в настоящее время, поскольку многие объекты в теплосетях имеют прямоточную схему, а протяженность отопительных сетей велика.
Решением этой проблемы является использование ПИД и ПИ законов регулирования, коэффициенты настройки которых, должны меняться в зависимости от текущего значения to .
В настоящее время современные микроконтроллеры позволяют реализовать очень сложные, но эффективные алгоритмы управления. Однако на рынке нет регуляторов, автоматически меняющих свои настройки в зависимости от транспортного запаздывания объекта.
Предлагается алгоритм ПИД-регулятора с автоматически перестраиваемыми коэффициентами.
ПД регулятор на входе имеет невязку, а на выходе величину соответствующую скорости изменения. Для получения выходного сигнала вычисляются пропорциональная, и дифференциальная составляющие части и суммируются. В форме Лапласа передаточная функция ПД регулятора W(p) имеет следующий вид:
W(p) = K×( 1 + p×Td ) т. е. Y(p) = e(p)×K×( 1 + p×Td )
Методы вычисления дифференциальной составляющей аналогичны тем, что были описаны выше. Простейшая цифровая реализация ПД регулятора имеет следующий вид:
Y(t)=K×( 1 + Td×d(t) ), где d(t)=e(t)-e(t-1)
Y’(p) = E(p) × (p + 1/Tи ) / Xп , Хп =1/K [1/sec]
Учитывая, что на выход регулятора подключен сервопривод, являющийся интегрирующим звеном с постоянной времени Ts :
Y(p) = Е(p)×(1/pTs)×Y’(p)/Xп ; или 
Y’(t) = K× (dE/ dt + E/Xп) = ( dE + E/Tи )/Xп [1/sec]
Исходя из (1), по методике Николса можно определить оптимальные значения коэффициентов ПИ регулятора: Tи=2× t0 , Xп=R× t0 .
Для обеспечения устойчивости и качества регулирования в процессе работы регулятора необходимо автоматически определять значения to . Самое простое, но дорогое решение - применение датчика скорости потока. Величины v и to можно оценить и по положению запорного клапана, учитывая нелинейность характеристики клапана.
Параметры настройки регуляторов также можно определить в результате активной и пассивной адаптации.
Вопрос определения to в результате пассивной идентификации очень сложен, так как разностное уравнение, соответствующее (1) не является линейным многочленом, относительно to :
![]() , иначе
, иначе ![]() , где a1=(1-1/T), a2=- a1, b=
, где a1=(1-1/T), a2=- a1, b=![]()
Если ступенчатое изменение уставок велико, значение to можно определить по наблюдаемым входным и выходным данным. Для данных приложений псевдообратная матрица, построенная на отсчетах Y(t),Y(t-1) … X(t), X(t-1) … плохо определена, в связи с малыми изменениями уставки и большим уровнем помех. В этих условиях решить задачу определения значений T и to методом наименьших квадратов нельзя.
Методы пробного сигнала (например, алгоритм Ротача) требуют длительного процесса наблюдения, предварительного грубого определения начальных параметров (например, методом Николса), а также могут привести к ухудшению экономических характеристик технологического процесса.
Другой проблемой является следующее: скорость сервопривода ограничена, а значение дифференциальной составляющей может измениться очень резко, например при изменении уставки. Скачок E = Xп ед. за шаг h = Ts приводит к Y’ =100%, т. е. длительность импульса = Ts. Если Хс=100сек, а h = 10сек, то Y’ не может быть больше 10%. Для некоторых приложений требуется “растянуть” дифференциальную составляющую, применяя фильтр нижних частот с постоянной времени в 5-10 раз меньше Ts.
Требуется также учитывать и сопротивление в трубах системы отопления. Оно складывается с местным сопротивлением потоку клапана.
Вследствие этих причин, при достаточно большом сопротивлении в трубах возникает непропорциональность регулирования расхода, так как показано на Рис.3.
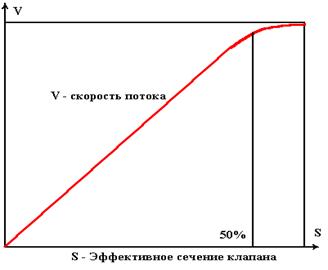 Рис.3.
Рис.3.
Реально регулирования не происходит при положении клапана от 50% до 100% . Таким образом, для предотвращения насыщения регулятора требуется установка дополнительного параметра, предела открытия клапана, при котором сигналы ПИД-регулятора на открытие блокируются. Если это происходит, необходимо увеличить температуру прямой воды в магистрали, то есть увеличить мощность котельной, может быть разжечь еще один котел. Все это касается и систем со смесительными клапанами.
Помимо всего изложенного, контроллер должен иметь широкий диапазон возможных настроек, особенно при использовании асинхронных ЭД в сервоприводах. Например, применение ПД регулятора ТРМ12 фирмы "Овен" в системах без теплообменника, но с запорными клапанами ограничено из-за отсутствия режима частотной модуляции выходного сигнала при малых рассогласованиях (в этом случае регулятор ТРМ-12 работает как трехпозиционный), это легко пояснить.
При реализации ШИМ период управления Ty может быть постоянным или переменным.
В случае постоянного периода выходная мощность определяется соотношением Y = tвк/Ty.Ts, где Ts – время открытия клапана при максимальной скорости привода.
Всегда существует минимально возможная длительность управляющего двигателя tвк = tm , оно определяется быстродействием реле и выбегом двигателя ( tm >0.2 сек) или шагом шагового электродвигателя. Таким образом, определяется минимально возможный выходной сигнал регулятора, для асинхронного ЭД: Ymin.= tm/Ty.Ts
В случае применения шагового двигателя: Ymin.= 1/Ty× n, где n – число его шагов, необходимого для открытия клапана от 0 до 100%.
В случае переменного периода ШИМ минимальный сигнал может быть очень малым. При этом период управления T_ вычисляется так:
T_ =Ty / tвх , а длительность импульса равна tm
Литература : Ерков системы управления и их применение. М.: ГНУ ВИЭСХ, 2002.
