
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Глава 4
4.1 Основные этапы развития и опыт использования
4.2 Типовые структуры микропроцессорных систем управления
4.2 Реализация функций управления преобразователями в
микропроцессорных системах управления
4.3 Программное обеспечение микропроцессорных систем
управления электроприводами
4.3.1 Операционные системы применяемые в
микропроцессорных системах управления
4.3.2 Языки программирования
4.3.3 Отладка аппаратной части микропроцессорных систем
управления
4.3.4 Отладка программного обеспечения
микропроцессорных систем управления
4.4 Многозадачный режим работы микропроцессорной
системы. Особенности организации
4.5 Разомкнутые микропроцессорные системы управления
4.5.1 Типовые узлы применяемые при организации
микропроцессорного управления
4.5.2 Основные типы схем микропроцессорного
управления
4.6 Замкнутые микропроцессорные системы управления
4.5.1 Типовые узлы применяемые при организации
микропроцессорного управления
4.5.2 Основные типы схем микропроцессорного
управления
4.7 Направления усовершенствования архитектуры
микропроцессоров применяемых для управления
4.8 Надежность систем микропроцессорного управления
4.8.1 Основные понятия и показатели надежности
4.8.2 Методы расчета надежности
4.8.3 Обеспечение надежности введением
внутриэлементной структурной избыточности
ВВЕДЕНИЕ
Распространение новых информационных технологий, основанных на
достижениях микроэлектроники последней четверти XX века, привело к значительным изменениям в самых различных областях. Традиционно рас сматривается прогресс в компьютерной технике, системах компьютерной обработки информации, компьютерных сетях и т. п. Однако не менее рево-люционные изменения произошли и в других сферах, связанных с применением технических средств обработки данных. Появление новых средств и технологий обработки данных позволило существенно расширить функциональные возможности и сложность решаемых задач в системах автоматизации.
Системы автоматического управления могут эффективно решать задачи на уровнях, начинающихся от управления отдельными узлами и устройствами и заканчивающихся управлением технологическими установками и
целыми производствами. В системах автоматизации применяются различные средства реализации алгоритмов управления. В настоящее время, несмотря на определенные особенности применения, наиболее эффективными являются цифровые методы и средства.
Современная микроэлектронная элементная база позволяет при невысоких затратах на аппаратные средства использовать разнообразные алгоритмы цифровой обработки данных, а их преимущества общеизвестны. Вес и роль аналоговых средств существенно снизилась в силу недостаточной точности, стабильности, функциональной гибкости и технологичности. Основная область применения аналоговых устройств - предварительная подготовка сигналов для преобразования в цифровой формат.
Одним из важнейших факторов прогресса в средствах автоматизации явяется "интеллектуализация" устройств, включая и устройства, выполняющие наиболее простые функции: измерительные датчики, исполнительные устройства, средства сигнализации и т. п. Кроме необходимых основных функций, "интеллектуальные" технические средства могут реализовать множество вспомогательных, зачастую весьма сложных алгоритмов преобразования данных при относительно невысоких дополнительных затратах.
Эта функциональная избыточность позволяет использовать одни и те же технические средства при решении разнообразных задач, несмотря на различие требований, реализуемых алгоритмов и функций. Очень часто выбор
определенных параметров, режимов и алгоритмов работы должен программироваться, т. е. определяться специальными процедурами настройки. Поэтому современные технические средства должны обладать соответствующей функциональной гибкостью, возможностью изменения параметров и режимов работы, поддерживать необходимые процедуры настройки.
4.1 Основные этапы развития и опыт использования
Анализ продукции ведущих мировых производителей систем привода и материалов опубликованных научных исследований в этой области позволяет отметить следующие ярко выраженные тенденции развития электропривода:Неуклонно снижается доля систем привода с двигателями постоянного тока и увеличивается доля систем привода с двигателями переменного тока. Это связано с низкой надежностью механического коллектора и более высокой стоимостью коллекторных двигателей постоянного тока по сравнению с двигателями переменного тока. По прогнозам специалистов в доля приводов постоянного тока сократится в ближайшее время до менее чем 10 % от общего числа приводов. Преимущественное применение в настоящее время имеют привода с короткозамкнутыми асинхронными двигателями. Большинство таких приводов (около 80 %) - нерегулируемые. В связи с резким удешевлением статических преобразователей частоты доля частотно - регулируемых асинхронных электроприводов быстро увеличивается. Естественной альтернативой коллекторным приводам постоянного тока являются привода с вентильными, т. е. электронно - коммутируемыми двигателями. В качестве исполнительных бесколлекторных двигателей постоянного тока (БДПТ) преимущественное применение получили синхронные двигатели с возбуждением от постоянных магнитов или с электромагнитным возбуждением (для больших мощностей). Этот тип привода наиболее перспективен для станкостроения и робототехники, однако, является самым дорогостоящим. Некоторого снижения стоимости можно добиться при использовании синхронного реактивного двигателя в качестве исполнительного.
Приводом этого века по прогнозам большинства специалистов станет привод на основе вентильно - индукторного двигателя (ВИД). Двигатели этого типа просты в изготовлении, технологичны и дешевы. Они имеют пассивный ферромагнитный ротор без каких - либо обмоток или магнитов. Вместе с тем, высокие потребительские свойства привода могут быть обеспечены только при применении мощной микропроцессорной системы управления в сочетании с современной силовой электроникой. Усилия многих разработчиков в мире сконцентрированы в этой области. Для типовых применений перспективны индукторные двигатели с самовозбуждением, а для тяговых приводов - индукторные двигатели с независимым возбуждением со стороны статора. В последнем случае появляется возможность двухзонного регулирования скорости по аналогии с обычными приводами постоянного тока. Для большинства массовых применений приводов (насосы, вентиляторы, конвейеры, компрессоры и т. д.) требуется относительно небольшой диапазон регулирования скорости (до 1:10, 1:20) и относительно низкое быстродействие. При этом целесообразно использовать классические структуры скалярного управления. Переход к широкодиапазонным (до 1:10000), быстродействующим приводам станков, роботов и транспортных средств, требует применения более сложных структур управления. Доля таких приводов составляет сейчас около 5 % от общего числа и постоянно растет. В последнее время на базе систем векторного управления разработан ряд приводов с прямым цифровым управлением моментом. Отличительной особенностью этих решений является предельно высокое быстродействие контуров тока, реализованных, как правило, на базе цифровых релейных регуляторов или регуляторов, работающих на принципах нечеткой логики (фаззи - логики). Системы прямого цифрового управления моментом ориентированы в первую очередь на транспорт, на использование в кранах, лифтах, робототехнике. Усложнение структур управления приводами потребовало резкого увеличения производительности центрального процессора и перехода к специализированным процессорам с объектно - ориентированной системой команд, адаптированной к решению задач цифрового регулирования в реальном времени. Рост вычислительных возможностей встроенных систем управления приводами сопровождается расширением их функций. Кроме прямого цифрового управления силовым преобразователем реализуются дополнительные функции поддержки интерфейса с пользователем (через пульт оперативного управления), а также управления технологическим процессом. В состав системы управления входят: универсальный регулятор технологической переменной, а также генератор управляющих воздействий на базе часов реального времени. Такое решение позволяет поддерживать давление в трубопроводе на заданном, в соответствии с суточной циклограммой, уровне исключительно средствами электропривода, без использования промконтроллеров.
Перспективные системы управления электроприводами разрабатываются с ориентацией на комплексную автоматизацию технологических процессов и согласованную работу нескольких приводов в составе промышленной сети. Стремление предельно удешевить привод, особенно для массовых применений в бытовой технике (пылесосы, стиральные машины
, холодильники, кондиционеры и т. д.), привело к отказу от датчиков механических переменных и переходу к системам бездатчикового управления, где для оценки механических координат привода (положения, скорости, ускорения) используются специальные цифровые наблюдатели. Это возможно только при высокой производительности центрального процессора, когда система дифференциальных уравнений, описывающих поведение привода, может быть решена в реальном времени. Возросшие возможности микропроцессорной техники привели к тому, что при массовом производстве изделий с объемом выпуска не менее 10000 штук в год, оказывается возможным и экономически целесообразным создание мощных, однокристальных систем управления приводами на базе DSP - микроконтроллеров. Их стоимость при ограниченных интерфейсных функциях не будет превышать$.Основные затраты при разработке систем управления приводами приходятся не на создание аппаратной части контроллера, а на разработку алгоритмического и программного обеспечения. Поэтому роль специалистов в области теории электропривода существенно возрастает.
4.2 Типовые структуры микропроцессорных систем управления
Типовые интерфейсы микропроцессорных систем
Любой микроконтроллер предназначен для выполнения полезных функций по управлению или контролю физическими параметрами конкретных объектов управления. Функции управления или контроля сводятся к обработке и последующему использованию цифровой двоичной информации, поступающей от объектов управления по линиям связи от различных устройств сопряжения МК с объектом. В качестве таких устройств могут быть датчики различных аналоговых физических параметров и связанные с ними нормирующие преобразователи электрических сигналов, аналого-цифровые преобразователи, датчики цифровой информации и др. Со стороны вывода информации МК взаимодействует с цифровыми индикаторами, исполнительными механизмами, дисплеями, цифропечатающими устройствами и другими средствами запоминания, хранения и использования результатов обработки информации.
Соединение всего многообразия внешних устройств с шинами микроконтроллера осуществляется с помощью интерфейсов, которые следует понимать как унифицированное средство объединения различных устройств в единую систему. Любой интерфейс должен обеспечить решение следующих двух задач.
Во-первых, интерфейс в своей аппаратной части должен обеспечить электрическое соединение различных внешних устройств с различными электрическими и конструктивными параметрами, с единой системой шин конкретного микроконтроллера. При этом должны быть учтены такие параметры, как количество линий связи, уровни и мощности электрических сигналов, длина и помехозащищенность линий связи.
Во-вторых, интерфейс должен обеспечить гибкое программное управление всеми подключенными внешними устройствами. В этой части интерфейс должен обеспечить не только работоспособность ВУ, но и согласование по быстродействию различных ВУ и центрального МП. Таким образом, под интерфейсом следует понимать унифицированное программно-аппаратное устройство, предназначенное для организации обмена информацией между микропроцессором и внешними устройствами, объединенными в единую систему.
По своему назначению интерфейсы бывают внутренними и внешними. Внутренний интерфейс объединяет БИС микропроцессора, модули памяти и средства управления вводом-выводом. Внешний интерфейс обеспечивает сопряжение информационных шин МК с внешними устройствами.
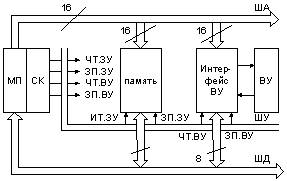
В практике создания микропроцессорных систем управления используются два типа системного интерфейса: интерфейс с изолированными шинами и интерфейс с совмещенными шинами.
Интерфейс с изолированными (адресными) шинами.
Отличительной особенностью этого интерфейса является раздельная адресация памяти и внешних устройств.
Интерфейс с совмещенными адресными шинами.
Интерфейс этого типа позволяет использовать всю шину адреса как для адресации памяти, так и для адресации внешних устройств. Для краткости его называют интерфейсом с общей шиной. Очевидным достоинством интерфейса с общей шиной является возможность использования при обмене данными между ВУ и МП всех команд, используемых для обмена с памятью.
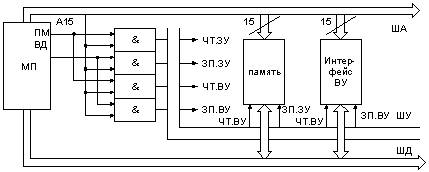
Главным достоинством интерфейса с общей шиной является возможность расширения набора команд для обращения к ВУ, что позволяет повысить производительность систем за счет сокращения требуемых для обмена команд программы. Нетрудно заметить,, что интерфейс с общей шиной позволяет увеличить количество адресуемых ВУ, но сокращает объем прямоадресуемой памяти. Однако этот недостаток интерфейса можно преодолеть за счет некоторого усложнения дешифрирующих схем и организации
Последовательный интерфейс
Все разновидности рассмотренных интерфейсов относятся к классу параллельных интерфейсов, когда обмен данными между микропроцессором и ВУ осуществляется параллельным кодом, который характеризуется тем, что все его разряды передаются одновременно. Например, при обмене 8-разрядным параллельным кодом одновременно по восьми линиям связи передаются все восемь разрядов цифрового кода. Если представить, что источник цифрового кода находится от контроллера технологического процесса на значительном расстоянии, то для передачи сообщения потребуется значительное количество линий связи. При значительных расстояниях стоимость линий связи и устройств согласования существенно сказывается на стоимости системы в целом.
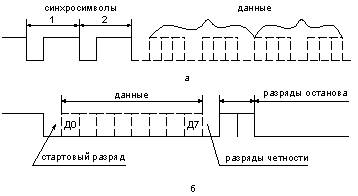
Последовательный интерфейс позволяет сократить затраты, так как для передачи данных используется одна линия связи, по которой каждый бит цифрового кода пересылается последовательно.. Для преобразования параллельного цифрового кода в последовательный используются специальные схемы, построенные на базе сдвиговых регистров, тактируемых импульсными последовательностями определенной частоты. Каждым тактовым импульсом параллельный цифровой код сдвигается на одну позицию, которая поступает на линию связи. Таким образом, параллельный цифровой код превращается в последовательность импульсов стандартных уровней. Помимо полезной информации последовательная „посылка дополняется служебной информацией, позволяющей определить начало и конец передаваемых данных.
Классическая схема микропроцессорного управления
Для перемещения и точного позиционирования рабочих органов робототехнических механизмов используются электроприводы с микропроцессорным управлением. Схема типового ЭПМПУ с аналогово-цифровыми узлами представлена на рисунке.
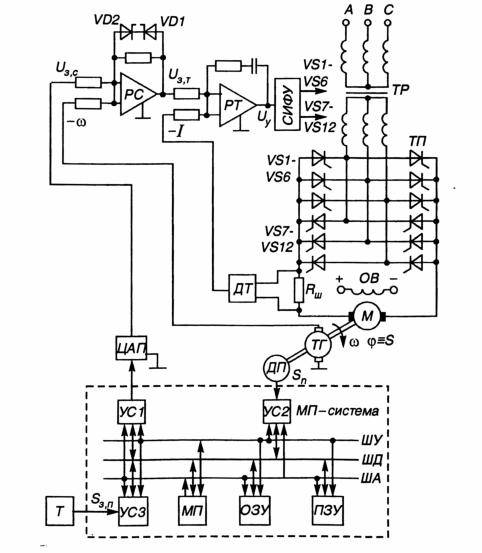
ПМПУ построен по принципу подчиненного регулирования координат рабочего органа. Имеет обратные связи по скорости (регулятор скорости РС) и току (ДТ и регулятор тока РТ). Стабилитроны VD1, VD2 обеспечивают ограничение тока и момента ДПТ.
Микропроцессорная система включает микропроцессор МП, устройства памяти ОЗУ и ПЗУ, устройства сопряжения УС1 - УСЗ, цифровой датчик положения ДП, цифро-аналоговый преобразователь ЦАП, обеспечивающий выходной сигнал задания скорости. Сигнал задания положения подается с терминала положения Т через УСЗ. Оптимальный график движения ЭП записывается в ПЗУ и определяет работу цифрового регулятора.
Выходное напряжение управления UУ регулятора поступает на систему импульсно-фазового управления СИФУ, которая определяет напряжение ТП и скорость вращения М.
Бездатчиковая схема управления
Электропривод с фазовым управлением
Схема привода была разработана очень простой, с целью использования всех свойств микроконтроллера. Такой дешевый микроконтроллер оказывается достаточно мощным для выполнения всех функций, необходимых для организации замкнутой бездатчиковой системы управления углом включения триака. Используются только две интегральные микросхемы и небольшое число внешних компонентов. Это обеспечивает очень компактную печатную плату и очень эффективное по стоимости решение.
Целью этого дизайна было обеспечение очень дешевой замкнутой системы управления универсальным двигателем без какого-либо тахометра. Как можно видеть на рис, схема состоит из следующих блоков:
микроконтроллер;
источник питания;
синхронизация;
измерение тока;
силовой ключ.
Специальное внимание было уделено измерению тока и его оценке. Так как этот сигнал очень важен для алгоритма бездатчикового управления, был выбран дифференциальный операционный усилитель. Он объединяет преимущества незаземленных входов и высокой помехоустойчивости.
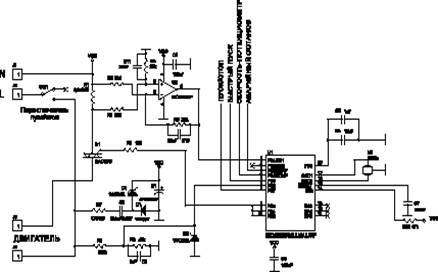
Рис
Из результатов моделирования следует, что ток it0, который измерен в точке перехода питания через ноль, зависит только от скорости, исключая случай наибольшей задержки включения в 8 мс. Для скоростей, больших 3000 об/мин и задержки включения менее 8,5 мс ток в точке перехода питания через ноль постоянен для заданной скорости в широком диапазоне изменения нагрузки. Для скоростей, меньших 3000 об/мин или задержки включения более 8,5 мс необходимо выполнить коррекцию.
Классическая схема управления с асинхронным двигателем переменного тока
Общая схема
Функциональные возможности
управление одно-, двух-, трехфазной нагрузками двумя методами:
— фазовым
— по числу полупериодов
плавный выход на заданный уровень мощности
блокировка входного сигнала
контроль тока в нагрузке
контроль перехода напряжения через ноль
Блок управления ключами (БУСТ)
Прибор должен иметь три идентичных канала управления тиристорами или симисторами. Каждый канал управления включает в себя:
устройство контроля перехода напряжения фазы через ноль;
устройство контроля тока фазы;
устройство обработки сигнала;
формирователь импульсов.
Входы
БУСТ имеет 9 входов:
3 входа для контроля перехода напряжения фазы через 0;
3 входа для контроля тока в нагрузке;
управляющий вход;
вход блокировки;
вход для задания уровня защитного отключения.
Канал управления
Устройство контроля перехода через ноль выдает импульс в начале каждого полупериода соответствующей фазы. Эти импульсы синхронизируют работу узлов устройства обработки сигналов.
Контроль перехода через ноль
Устройство контроля тока предназначено для защитного отключения нагрузки при превышении установленной величины. Ко входу устройства контроля тока подключается вторичная обмотка трансформатора тока, а его первичная обмотка включена в цепь нагрузки соответствующей этому входу фазы.
Сигнал «блокировка» запрещает запуск формирователя импульсов. При его снятии произойдет плавный выход на заданный уровень мощности. В качестве источника сигнала «блокировка» могут применяться электронные устройства, имеющие на выходе сигнал TTL-уровня, транзистор n–p–n-типа с открытым коллекторным выходом или кнопки, тумблеры, герконы или реле. Активный уровень сигнала «блокировка» — низкий.
Уровень защитного отключения задается внешним переменным резистором сопротивлением. При превышении заданного порога устройство контроля тока формирует сигнал аварийного выключения, при котором блокируется работа устройства обработки сигналов.
Схема устройства с тиристорами в качестве ключевого блока
ТК— 3-х фазный коммутатор;
ИП — источник питания;
ФИ — формирователь управляющих импульсов тиристоров;
МК — микропроцессорный контроллер;
УВВ — устройство ввода-вывода;
АД — приводной асинхронный двигатель;
ДТ1, ДТ2 — датчики токов;
ДН1, ДН2 — датчики напряжения.
Устройство представляет собой нереверсивный трехфазный тиристорный коммутатор (ТК) с многофункциональной системой управления (СУ) на базе микропроцессорного контроллера (МК) и развитым пользовательским интерфейсом, аппаратно обеспечиваемым устройством ввода вывода дискретных сигналов (УВВ).
Основным силовым элементом ТК является тиристорный ключ, представляющий собой цепную схему, состоящую из ряда последовалельно соединенных звеньев, а каждое звено — два включенных встречно параллельно тиристора. Для выравнивания напряжения между последовательно включенными тиристорами в статических и динамических режимах параллельно каждому звену включены резисторная и резисторно-емкостная цепи, а также датчик состояния тиристоров. Информация о состоянии тиристоров передается в систему управления. Каждый из тиристоров ключа имеет свой импульсный трансформаторный узел управления. Для уменьшения разброса во временах включения тиристоров, включенных последовательно, первичные обмотки их импульсных трансформаторов соединены последовательно.
Потенциальное разделение между высоковольтной силовой частью и низковольтной системой управления осуществляется с помощью оптического тракта и импульсных трансформаторов.
В устройстве имеется три описанных выше тиристорных ключа по числу фаз питания.
Датчики тока ДТ1, ДТ2 на трансформаторах тока в силовом канале служат для контроля, регулирования и измерения величины пускового или нагрузочного тока электродвигателя, в том числе для защиты от токов перегрузки и короткого замыкания.
Датчики напряжения ДН1 и ДН2 на высоковольтных трансформаторах напряжения служат для синхронизации системы управления с силовой питающей сетью, контроля наличия всех фаз силового напряжения и правильности их чередования.
Многоканальный источник питания ИП преобразует сетевое переменное напряжение 380 В в систему напряжений постоянного тока требуемых уровней и степени стабильности, гальванически связанных и не связанных между собой, для питания устройств управления.
Микропроцессорный контроллер МК осуществляет формирование режимов работы устройства с заданными параметрами с помощью сигналов управления: сигналов управления тиристорами, сигналов защиты и аварийного отключения АС15, приёма и передачи внешних управляющих, задающих и информационных сигналов.
Устройство ввода/вывода УВВ предназначено для приёма и передачи внешних управляющих сигналов.
УВВ имеет набор дискретных входов и выходов. Во входные и выходные цепи УВВ включены устройства гальванической развязки для потенциального разделения с внешними управляющими цепями.
Формирователи импульсов ФИ (драйверы) предназначены для формирования требуемых уровней управляющих сигналов тиристоров, гальванического разделения силовых цепей и цепей управления тиристоров и МК.
