
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
крупных мостовых переходов
Федеральное агентство по образованию
ГОУ ВПО «Саратовский государственный университет
им. »
Кафедра компьютерной физики
Физического факультета
,
Компьютерная система слежения
на строительстве
крупных мостовых переходов
Учебно-методическое пособие к курсу
«Автоматизированные системы мониторинга»
Рекомендовано Методическим семинаром
кафедры компьютерной физики
Саратов - 2009
1. Актуальность задачи автоматизированного контроля. За последние десятилетия наибольшее распространение получил монтаж стальных и сталежелезобетонных мостов методом продольной надвижки. Для обеспечения безопасности надвижки и надежности мостовых конструкций во время строительства особое внимание уделяется контролю за процессом надвижки. Данное краткое пособие представляет практику, относящуюся к контролю за монтажом и описывает некоторые детали по реализации контроля, применяемого при строительстве мостов через р. Волгу Цельнометаллическое пролетное строение моста у с. Пристанное вблизи Саратова состоит из двух участков: правобережный участок пролетного строения длиной 1228,5 м выполнен по схеме 63+73,5+84+8´126, левобережный длиной 1102,5 м – по схеме 3´126+3´157,5+2´126 (рис. 1).
 Оба участка соединены над опорой 9 деформационным швом. Пролетное строение расположено на уклоне – с правого берега на левый. Правобережное пролетное строение расположено на горизонтальной круговой кривой радиусом 4000 м. В поперечном сечении пролетное строение состоит из двух L – образных главных балок высотой 3636 мм, объединенных в уровне нижнего пояса ребристой плитой, а в уровне верхнего пояса – двумя ортотропными плитами. Ширина верха коробки с консолями составляет 14516 мм, расстояние между главными балками – 5384 мм. Главные балки укрупнялись на стройплощадке из секций длиной от 10,5 до 21 м, масса каждой балки до 30 т.
Оба участка соединены над опорой 9 деформационным швом. Пролетное строение расположено на уклоне – с правого берега на левый. Правобережное пролетное строение расположено на горизонтальной круговой кривой радиусом 4000 м. В поперечном сечении пролетное строение состоит из двух L – образных главных балок высотой 3636 мм, объединенных в уровне нижнего пояса ребристой плитой, а в уровне верхнего пояса – двумя ортотропными плитами. Ширина верха коробки с консолями составляет 14516 мм, расстояние между главными балками – 5384 мм. Главные балки укрупнялись на стройплощадке из секций длиной от 10,5 до 21 м, масса каждой балки до 30 т.
Когда монтаж осуществляется методом продольной надвижки, напряженно-деформированное состояние мостовых конструкций постоянно изменяется. В этот период надвигаемое пролетное строение очень чувствительно к отклонениям от проектных предпосылок. В поперечном сечении пролетное строение однокоробчатое. Погонный вес однокоробчатого пролетного строения колеблется в интервале 5,9 ¸ 6,2 т/м, что вызывает реакции на опорах до 1500 т. Коэффициент трения скольжения между полированным листом перекаточных обустройств и антифрикционным материалом (напр., нафтлен, даклен) зависит от разных факторов и обычно находится в диапазоне 5 ¸ 12%. Возможное превышение безопасных уровней опорных реакций или коэффициента трения может привести к исчерпанию несущей способности пролетного строения, или опор, или и того и другого вместе. Следовательно, контроль за напряженно-деформированным состоянием пролетных строений и опор во время процесса надвижки является важным аспектом.
2. Выбор основных параметров для контроля. В процессе надвижки пролетного строения могут возникнуть напряжения и деформации, превышающие допустимые значения, это может привести к исчерпанию его несущей способности. При существующих допусках на сборку пролетных строений, установку перекаточных устройств, накопленные суммарные вертикальные отклонения могут достичь величины – 10![]() 15мм. Такие отклонения в уровнях опирания смежных балок, находящихся на одной опоре, приводят к перегрузке одной из стенок пролетного строения. Для выравнивания реакций под стенками коробки в процессе надвижки пролетных строений моста через реку Волгу у с. Пристанное под перекаточными устройствами устанавливаются гидравлические преобразователи (плоские домкраты грузоподъемностью 1000т с ходом поршня до 50мм). Эти преобразователи объединены на опоре в единую гидравлическую систему.
15мм. Такие отклонения в уровнях опирания смежных балок, находящихся на одной опоре, приводят к перегрузке одной из стенок пролетного строения. Для выравнивания реакций под стенками коробки в процессе надвижки пролетных строений моста через реку Волгу у с. Пристанное под перекаточными устройствами устанавливаются гидравлические преобразователи (плоские домкраты грузоподъемностью 1000т с ходом поршня до 50мм). Эти преобразователи объединены на опоре в единую гидравлическую систему.
Теоретические значения реакций опор, изгибающих моментов и поперечных сил для любого сечения пролетного строения определяется по моделирующей процесс надвижки программе «Роллинг», разработанной в проектном институте ²Гипротрансмост². Результаты расчета содержат данные о нормативных значениях реакций, изгибающих моментов, поперечных сил, прогибов на каждом шаге надвижки пролетного строения в сечениях, назначенных проектировщиком. Кроме того, им же, определяются значения критических реакций, исходя из обеспечения местной устойчивости отсеков стенок главных балок.
В наиболее нагруженных сечениях (корневые участки консоли пролетного строения с наибольшим вылетом во время надвижки и стыки главных балок, имеющих переломы профиля), необходимо измерение напряжения по стенкам балок в зоне нижнего пояса ![]() и
и ![]() .
.
Особое внимание необходимо уделять отслеживанию динамики отклонения оголовков опор, как наиболее уязвимого параметра, с точки зрения опасности быстрого развития нештатной ситуации. На определенных интервалах надвижки опорные реакции достигают величин, сравнимых с величинами на стадии эксплуатации. Применяемые в перекаточных устройствах антифрикционные материалы обладают достаточным разбросом величины коэффициента трения скольжения, зависящего от многих факторов - температуры воздуха, удельного давления, продолжительности перерывов надвижки и т. п.
· При строительстве моста применяется специальное шпренгельное устройство, позволяющее без сооружения временных опор надвигать пролетное строение длиной до 160 метров (рис. 2).
·

Поэтому предусмотрен контроль за некоторыми другими параметрами, не влияющими на работоспособность отдельных элементов, но обеспечивающих успешное ведение монтажа, а именно:
· контроль за величиной усилия выталкивания;
· контроль за положением пролетного строения в пространстве, путем определения координат свободного конца аванбека;
· контроль за усилием в ветвях полиспастов шпренгельной системы, выбирающих прогиб консоли пролетного строения и гасящих колебания;
· контроль за длиной плети пролетного строения, выдвинутой за устой и консоли в любой момент времени;
контроль за напряжением сжатия бетона в уровне объединения тела опоры с фундаментом.
Все замеры вышеприведенных параметров передаются на цетральный компьютер для оперативного анализа, а при появлении нештатной ситуации - для остановки надвижки при помощи стоп-кнопки, находящейся на контрольном пункте управления надвижкой.
3. Система компьютерного контроля. Прежде всего следует подчеркнуть основные факторы внешних условий, оказавших наибольшее влияние на рассматриваемую систему компьютерного контроля производственного процесса (далее СККПП).
· Большая протяженность системы (около 1500 метров) и линейное расположение точек измерения параметров процесса.
· Работа системы на открытом воздухе, т. е. температурный диапазон от +60°С (летом в металлической коробке) до -35°С зимой. Прямое воздействие атмосферных осадков на оборудование системы.
· Наличие больших масс металла, работа мощных электроустановок.
Рассматриваемую СККПП можно условно разделить на три составляющие части: cовокупность цифровых измерительных устройств, реализующих непосредственное измерение необходимых физических величин с последующим представлением результатов измерения в некотором цифровом коде;
система сбора данных (CCД), выполняющая транспортировку полученных данных в центральную станцию (AT совместимый персональный компьютер);
программное обеспечение, предназначенное для управления системой сбора данных, отображения состояния производственного процесса в реальном масштабе времени, накопления и сохранения результатов измерений.
При контроле за процессом продольной надвижки пролетного строения использовалось несколько типов измерительных устройств.
Для определения расстояния надвижки используется устройство, представляющее из себя колесо, вращаемое внешней стороной днища коробки пролетного строения при его перемещении по перекаточным обустройствам. Вращение колеса через понижающий редуктор передается на датчик положения угла поворота. Данный датчик выполнен на основе девятиразрядного кода Грея с оптическим съемом информации. При используемом диаметре колеса и коэффициенте редукции, продвижение пролетного строения фиксировалось с дискретом в 10 см. Данное устройство может устанавливаться на любой опоре под пролетным строением.
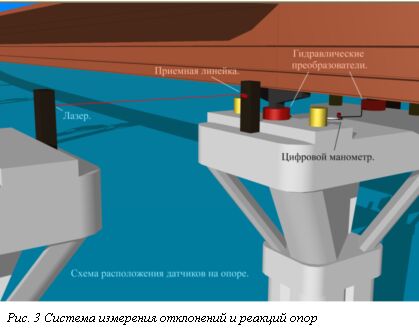
Следующая группа датчиков используется для определения реакций на опорах рис.3. Само измерение сводится к определению давления в упомянутой выше гидравлической системе. Для этой цели использовались устройства выполненные на основе обычных стрелочных манометров. Для определения угла поворота индикаторной оси манометра применяется датчик положения угла поворота, аналогичный вышеописанному. Точность измерения определяется классом точности используемых манометров, площадью поршней домкратов и составляет около 60тс.
Следует отметить, что применение в качестве первичных измерительных элементов гостированных устройств снимает вопросы о правомерности их использования в системе контроля. Данный принцип был реализован при построении еще нескольких типов датчиков: для измерения напряжений в стенках пролетного строения, для осуществления контроля за напряжением сжатия бетона опор в уровне объединения тела опоры с фундаментом и для определения усилия в ветвях полиспаста, выбирающего прогиб консоли пролетного строения. Во всех этих случаях измерительными устройствами были индикаторы часового типа, соединенные с уже описанным датчиком угла поворота на основе кода Грея.
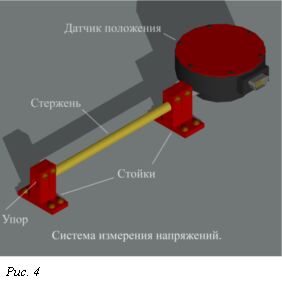
Для определения напряжений в стенках пролетного строения и напряжений сжатия бетона опор использовалась одна и та же система измерения, схематично изображенная на рис 4. Различными были только базы измерения, которые составляли 145 мм для металла и 450 мм для бетона. В рабочем положении нижний конец металлического стержня закреплен, а верхний остается свободным. При деформационных процессах в стенках пролетного строения или в теле опоры, расстояние между стойками изменяется, что и фиксируется датчиком положения. Для сохранения информации о напряжениях в обоих этих случаях, в периоды времени между надвижками, верхний конец стержня закрепляется, а нижний остается свободным и фиксируется некоторый зазор между торцом стержня и упором.
Для измерения усилий в ветвях полистпаста выбора прогиба консоли пролетного строения применяется конструкция, представленная на рис.5. В этом устройстве нижний конец стержня закреплен, а верхний остается свободным и в его торец упирается щуп датчика положения. При растяжении всей конструкции, база которой составляет 700 мм, свободный торец стержня перемещается вниз, что и фиксируется индикатором. Данное устройство было протарировано на разрывной машине типа ГМС-100.
С целью отслеживания отклонения оголовков опор были разработаны следующие измерительные устройства. На боковом упоре опоры второй очереди строительства закрепляется источник лазерного излучения (рис.6). На аналогичном упоре опоры первой очереди, отклонение которой и необходимо измерять, закрепляется оптический приемник, представляющий собой линейку фотодиодов. При перемещении наблюдаемой опоры вдоль оси надвижки луч лазера движется по приемной линейке и по номеру засвеченного фотодиода определяется отклонение опоры. Точность измерения 4мм следует из размеров приемных фотодиодов.
|
|

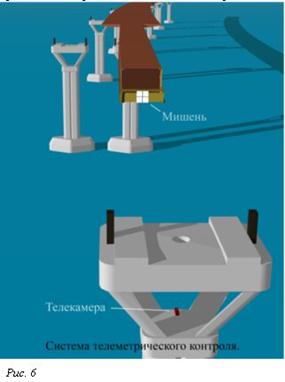 Для определения координат свободного конца аванбека по горизонтали и вертикали используется комплекс, состоящий из мишени в виде креста черных полос на белом фоне, закрепленной на конце аванбека; телекамеры, установленной на принимающей опоре рис.6, персонального компьютера, снабженного устройством видеозахвата и специальным программным обеспечением. Изображение мишени с телекамеры поступает в компьютер. Далее производится анализ полученного двумерного массива с целью получения координат центра мишени в поле матрицы телекамеры. По относительному перемещению центра креста вычисляются координаты конца аванбека. Точность измерения данным комплексом - 5см.
Для определения координат свободного конца аванбека по горизонтали и вертикали используется комплекс, состоящий из мишени в виде креста черных полос на белом фоне, закрепленной на конце аванбека; телекамеры, установленной на принимающей опоре рис.6, персонального компьютера, снабженного устройством видеозахвата и специальным программным обеспечением. Изображение мишени с телекамеры поступает в компьютер. Далее производится анализ полученного двумерного массива с целью получения координат центра мишени в поле матрицы телекамеры. По относительному перемещению центра креста вычисляются координаты конца аванбека. Точность измерения данным комплексом - 5см.
Перейдем к рассмотрению следующей составной части СККПП – ССД, в состав которой входят контроллеры удаленных устройств (датчиков КУУ), линия передачи данных с ретрансляторами, устройство сопряжения линии передачи данных с магистралью ISA PC. Система сбора данных это локальная вычислительная сеть, узлами которой являются контроллеры удаленных устройств и один персональный компьютер. Топология данной сети шина. Физической средой передачи выбран 75 омный коаксиальный кабель РК75-4-12. Каждый контроллер удаленного устройства имеет уникальный адрес, что позволяет организовать опрос датчиков следующим образом: центральная станция формирует кадр, включающий в себя адрес определенного устройства и передает его по линии, все контроллеры удаленных устройств, включенные в сеть, принимают этот кадр, но только одно устройство опознает «свой» код и формирует ответ, включающий в себя данные поступающие в КУУ от цифрового датчика. Такой принцип работы позволяет производить сбор данных в любой последовательности и избежать конфликтов при транспортировке данных от многих узлов, не используя неприменимую в данном случае концепцию единой области коллизий, применяемую в сети ETHERNET.
Программное обеспечение данной системы в свою очередь разделено на несколько взаимодействующих частей. Это драйвер (программа управления) устройством сопряжения PC и линии, программа обработки и сохранения данных и программа графического представления данных, работающая в двух режимах: представление данных в реальном масштабе времени и просмотр сохраненных результатов. Первые два блока написаны на языке программирования С. Последний использует объектно-ориентированное программирование в реализации С++. Имеются версии программного продукта для операционных систем MS-DOS и Windows. Рассмотрим принципы вывода соответствующей информации о состоянии процесса надвижки т. е. вид экрана программы графического представления данных Рис. 7. Информация сгруппирована в отдельных окнах по типу измеряемой величины.

Рис. 7. Вид экрана программы графического представления данных
В нижнем окне представлено схематическое изображение надвигаемого пролетного строения, с разбивкой на блоки и панели, и опор моста.
В левом среднем окне выведена информация об отклонении оголовков опор в числовом виде и графическое представление гистограммой, которое применяется для визуального отображения большинства данных. Так же для каждой опоры дано предельно допустимое значение отклонения.
В соседнем справа окне выведена информация по реакциям опор. Кроме данных, поступивших с измерительных устройств для каждой опоры, выводятся еще значения предельно допустимой и теоретической реакции, изменяющиеся на каждом шаге надвижки.
В следующем окне этого ряда выводятся данные усилий в ветвях полистпаста по верховой и низовой стороне.
В верхнем левом окне представлена информация о напряжении в стенках пролетного строения, при этом данные сгруппированы попарно для напряжений в верховой и низовой стенке с одинаковым удалением датчиков от конца пролетного строения с указанием расстояния.
В среднем верхнем окне представляются результаты измерений сжатия бетона принимающей опоры в уровне верха фундамента в числовом и графическом виде.
В последнем окне осуществляется вывод информации о вертикальном прогибе и боковом отклонении конца аванбека. Для вертикального прогиба имеется возможность графического представления заранее введенных верхнего и нижнего предела по прогибу.
Все контролируемые параметры надвижки в реальном масштабе времени передавались посредством модема в локальные сети заказчика и других участников строительства
4. Основные результаты применения системы компьютерного контроля. остоянное сопровождение основных строительно-монтажных работ с помощью данной системы компьютерного контроля позволяет в процессе надвижки пролетных строений не только своевременно получать необходимую информацию о состоянии всех наиболее ответственных зон и участков, но и на основе анализа полученных данных измерений в реальном масштабе времени вносить коррективы с целью совершенствования способов производства работ и отдельных проектных решений, а также остановки процесса надвижки в случаях возникновения нештатных ситуаций. Ниже приведены конкретные эпизоды, возникавшие в процессе надвижки.
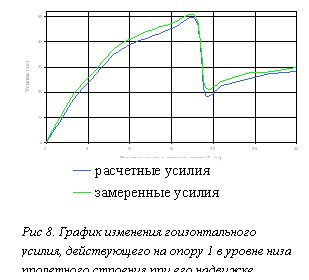
Надвижка пролетного строения на опору 1 осуществлялась с помощью аванбека длиной 21 м, при этом скошенная его часть 18 м имела уклон 15%. На рис. 8 зафиксирован резкий скачок величины горизонтального усилия, действующего на опору в уровне накаточного устройства, с понижением от 48,2тс до 19,3 тс. Это объясняется поворотом перекаточного устройства в точке перелома профиля аванбека.
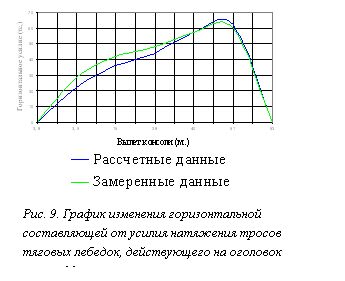
Характерной является надвижка на опору 12 в пролете 157,5 м. Здесь можно выделить две стадии работы опоры:
· отклонение опоры навстречу надвигаемому пролетному строению от воздействия усилий в тросах шпренгельного устройства рис 9;
· отклонение опоры по ходу движения пролетного строения от усилий трения в накаточном устройстве рис 10.
При надвижке правобережного пролетного строения (ситуация от опоры к опоре в той или иной степени повторяется) наблюдается следующая закономерность. При проходе контролируемых сечений в корне консоли (6 сечений с интервалом 6м) через накаточные устройства четко фиксируется возрастание напряжений сжатия в верховой стенке коробки и соответственное снижение таковых по низовой стороне рис 11. Следует отметить, что здесь приведены результаты с максимальной разницей величин напряжений в стенках коробки, полученные при наезде пролетного строения на опору 8. Как видно из этого рисунка весь процесс отклонения напряжений от среднего значения происходит действительно в то время, когда контролируемое сечение проходит зону накаточного обустройства ![]() 2.5 м. Такое поведение напряжений в стенках пролетного строения можно объяснить несовершенством гидравлической системы, c помощью которой происходит выравнивание реакций под стенками коробки в процессе надвижки. Указанное несовершенство заключается в элементарном перекосе штоков гидравлических домкратов и их ²заклинивания ² во время движения пролетного строения.
2.5 м. Такое поведение напряжений в стенках пролетного строения можно объяснить несовершенством гидравлической системы, c помощью которой происходит выравнивание реакций под стенками коробки в процессе надвижки. Указанное несовершенство заключается в элементарном перекосе штоков гидравлических домкратов и их ²заклинивания ² во время движения пролетного строения.
|
|
 Достаточно редкая ситуация произошла при надвижке пролетного строения в пролете 2-3. Процесс надвижки протекал в нормальном режиме, пролетное строение было продвинуто на 43 м относительно начального положения и отклонения опор 1 и 2 были в допустимых пределах. По технологическим причинам надвижка была приостановлена приблизительно на 1,5 часа. После перерыва первое же движение пролетного строения привело к предельному отклонению опоры №2, из-за чего надвижка была в экстренном порядке остановлена. Следует отметить, что в это время применялись карточки Хотьковского завода. Было принято решение заменить используемые на накаточном устройстве карточки на новые. После замены карточек, отклонение опоры 2 уменьшилось почти в три раза. Проведенный впоследствии осмотр бывших в употреблении на этой опоре карточек показал, что их покрытие потеряло антифрикционное свойство.
Достаточно редкая ситуация произошла при надвижке пролетного строения в пролете 2-3. Процесс надвижки протекал в нормальном режиме, пролетное строение было продвинуто на 43 м относительно начального положения и отклонения опор 1 и 2 были в допустимых пределах. По технологическим причинам надвижка была приостановлена приблизительно на 1,5 часа. После перерыва первое же движение пролетного строения привело к предельному отклонению опоры №2, из-за чего надвижка была в экстренном порядке остановлена. Следует отметить, что в это время применялись карточки Хотьковского завода. Было принято решение заменить используемые на накаточном устройстве карточки на новые. После замены карточек, отклонение опоры 2 уменьшилось почти в три раза. Проведенный впоследствии осмотр бывших в употреблении на этой опоре карточек показал, что их покрытие потеряло антифрикционное свойство.
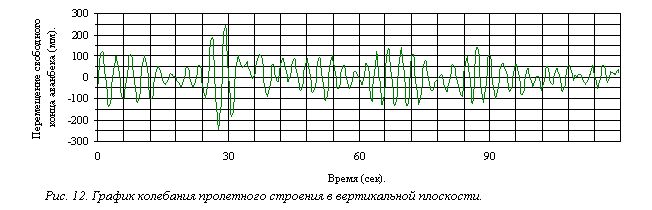
Рассмотрим еще один пример. Во время надвижки в пролет 7-8, когда вылет консоли составлял 102,2 м, порывистый ветер (скорость ветра составляла 15-20 метров в секунду) возбудил колебания пролетного строения как в вертикальной (амплитуда колебаний в этой плоскости достигала 60 см), так и в горизонтальной плоскостях. C помощью телеметрического контроля эти колебания были зафиксированы и на рис.12 представлен график этого процесса. Из этого рисунка следует, что колебательный процесс носит модуляционный характер с явными участками нарастания и спада амплитуды колебаний. Приведенный на рис.12 экспериментальный материал позволяет сделать вывод о том, что выдвинутая консоль представляет собой колебательную систему с высокой добротностью. На основании вышеизложенного, при производстве работ по надвижке пролетных строений с такой консолью, необходимо предусматривать меры для гашения этих колебаний.
При надвижке правобережного пролетного строения, расположенного на горизонтальной кривой радиусом 4000 м и вертикальных кривых переменного радиуса , примененная телеметрическая система контроля за положением свободного конца аванбека в пространстве, позволила с достаточной точностью наезжать на перекаточные устройства принимающих опор.
Система компьютерного контроля напряженного состояния пролетного строения и опор прошла достаточную первичную проверку на работоспособность и может быть рекомендована для включения в нормативные документы по строительству мостов.
Литература
1. , Современные технологии контроля в строительстве внеклассных мостов // Совместный специализированный выпуск журналов «Транспортное строительство» и «Транспорт Российской Федерации». 2007. № 1. С. 86-87.
2. , Автоматизированная система мониторинга напряженного состояния мостовых конструкций в процессе строительства внеклассных мостовых переходов федерального значения в гг. Саратове, Казани, Волгограде, Астрахани и Ульяновске в режиме реального времени // Третий Саратовский салон изобретений, инноваций и инвестиций. Саратов: Изд-во Сарат. ун-та. Ч. 1. С. 105-106. ISBN 3751-4.
