

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 681.51
М. В. ФАРОНОВ, А. А. ПЫРКИН[1]
(Санкт-Петербургский национальный исследовательский университет
информационных технологий, механики и оптики)
АДАПТИВНОЕ УПРАВЛЕНИЕ НЕЛИНЕЙНЫМИ СИСТЕМАМИ С НЕТОЧНО ЗАДАННОЙ ОТНОСИТЕЛЬНОЙ СТЕПЕНЬЮ В УСЛОВИЯХ ПОЛНОЙ ПАРАМЕТРИЧЕСКОЙ НЕОПРЕДЕЛЕННОСТИ
В работе рассматривается задача стабилизации по выходу нестационарных параметрически неопределенных объектов с неточно заданной относительной степенью в условиях действия неизвестного возмущения, запаздывания и неучтенной динамики. Вводится модификация полученного в более ранних публикациях алгоритма управления, проводится анализ устойчивости замкнутой системы и обсуждаются условия устойчивости систем управления данного класса.
Введение
В настоящее время задачи адаптивного управления по выходу являются актуальными и находят применение на практике в случаях, когда параметры или переменные состояния объекта управления трудно или невозможно измерить, на объект действует неизвестное возмущение, или параметры подвергаются изменениям в процессе работы.
Данная статья посвящена разработке адаптивного алгоритма управления объектами с линейной частью и нелинейным блоком в обратной связи в условиях полной параметрической неопределенности и наличия переменных параметров в условиях действия неизвестного запаздывания по состоянию, ограниченного по амплитуде возмущения и паразитной неучтенной динамики.
Отметим, что задачи анализа систем с неучтенной динамикой, возмущением и запаздыванием не являются новыми, и им посвящено достаточно большое число публикаций. Так, в [3] представлены основные результаты, полученные при исследованиях сингулярно возмущенных систем, начиная с 1982 года. Статьи [8], [9] посвящены компенсации смещенного гармонического возмущения, действующего на неустойчивый объект управления с запаздыванием. Проблемы устойчивости нелинейных систем с запаздыванием рассматривались в работах [5], [6], [7].
Целью данной работы является анализ устойчивости приведенного в [1], [2] алгоритма управления и его модификация для случая, когда присутствуют переменные параметры, и известна только максимальная относительная степень, то есть поиск аналитических условий, выполнение которых гарантирует устойчивость системе управления с модифицированным «последовательным компенсатором».
Постановка задачи
Рассмотрим нелинейный объект управления вида
 (1)
(1)
![]() (2)
(2)
со скалярным входом и скалярным выходом, где  – вектор переменных состояния системы (1);
– вектор переменных состояния системы (1); ![]() – вектор переменных состояния системы (2);
– вектор переменных состояния системы (2);  – измеряемая выходная переменная объекта; функция
– измеряемая выходная переменная объекта; функция ![]() – не измеряется;
– не измеряется; ![]() – сигнал управления;
– сигнал управления; ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и  – матрицы и векторы соответствующей размерности с неизвестными коэффициентами; как и в [4], будем полагать, что
– матрицы и векторы соответствующей размерности с неизвестными коэффициентами; как и в [4], будем полагать, что ![]() ; уравнение (2) представляет асимптотически устойчивую динамику, которая не учитывается при синтезе закона управления; число
; уравнение (2) представляет асимптотически устойчивую динамику, которая не учитывается при синтезе закона управления; число ![]() – определяет быстродействие системы (2);
– определяет быстродействие системы (2); ![]() – ограниченное по амплитуде возмущающее воздействие;
– ограниченное по амплитуде возмущающее воздействие; ![]() – вектор ограниченных переменных параметров;
– вектор ограниченных переменных параметров; ![]() – гладкая нелинейная функция, удовлетворяющая условиям секторных ограничений вида
– гладкая нелинейная функция, удовлетворяющая условиям секторных ограничений вида
 , (3)
, (3)
где числа ![]() и
и ![]() неизвестны.
неизвестны.
Требуется обеспечить сходимость выходной переменной системы (1), (2) в заданную окрестность ![]() положения равновесия за некоторое конечное время
положения равновесия за некоторое конечное время
![]() ,
, ![]() . (4)
. (4)
Основной результат
Систему (1) можно записать следующим образом:
 (5)
(5)
где ![]()


![]() – компоненты вектора переменных параметров
– компоненты вектора переменных параметров ![]() .
.
Перепишем систему (5), (2) в форме вход-выход
![]() , (6)
, (6)
![]() , (7)
, (7)
где ![]() – оператор дифференцирования; выходная переменная
– оператор дифференцирования; выходная переменная ![]() измеряется;
измеряется; ![]() ,
, ![]() ,
,  ,
,  ,
,  – полиномы с неизвестными параметрами;
– полиномы с неизвестными параметрами; ![]()
![]() ; известна максимальная относительная степень передаточной функции
; известна максимальная относительная степень передаточной функции ![]() , равная
, равная ![]() ; полином
; полином ![]() гурвицев и коэффициент
гурвицев и коэффициент ![]() ;
; ![]() – неизвестное запаздывание, полиномы
– неизвестное запаздывание, полиномы ![]() определяются как
определяются как ![]() .
.
Замечание 1. Измеряемой является только выходная переменная  , а её производные не измеряются, что усложняет построение регулятора.
, а её производные не измеряются, что усложняет построение регулятора.
В соответствии с [2] выберем закон управления следующим образом:
![]() , (8)
, (8)
 (9)
(9)
где число ![]() и полином
и полином ![]() степени
степени ![]() выбираются так, чтобы передаточная функция
выбираются так, чтобы передаточная функция ![]() была строго вещественно положительной, положительный параметр
была строго вещественно положительной, положительный параметр ![]() служит для компенсации нелинейности
служит для компенсации нелинейности ![]() , число
, число ![]() , а коэффициенты
, а коэффициенты ![]() рассчитываются из требований асимптотической устойчивости системы (9) при нулевом входе
рассчитываются из требований асимптотической устойчивости системы (9) при нулевом входе ![]() .
.
Замечание 2. Будем сначала решать задачу для случая известной относительной степени объекта управления, а затем обобщим полученный результат.
Проведем ряд преобразований. Подставляя (8) в (7), а затем в уравнение (6), и представив модель в форме вход-состояние-выход, получаем:
 , (10)
, (10)
![]() , (11)
, (11)
где ![]() и
и ![]() ,
, ![]() – вектор переменных состояния модели (12);
– вектор переменных состояния модели (12); ![]() ,
, ![]() ,
, ![]() ,
, ![]() и
и ![]() – матрицы перехода от модели вход-выход к модели вход-состояние-выход, причем в силу известной леммы Якубовича-Калмана (см., например, [4]) можно указать симметрическую положительно определенную матрицу
– матрицы перехода от модели вход-выход к модели вход-состояние-выход, причем в силу известной леммы Якубовича-Калмана (см., например, [4]) можно указать симметрическую положительно определенную матрицу ![]() , удовлетворяющую двум следующим матричным уравнениям:
, удовлетворяющую двум следующим матричным уравнениям:
 ,
, ![]() , (12)
, (12)
где ![]() – некоторая положительно определенная матрица.
– некоторая положительно определенная матрица.
Перепишем (9) и (2) в векторно-матричной форме:
![]() ,
, ![]() , (13)
, (13)
![]() ,
, ![]() , (14)
, (14)
где ![]() и
и ![]() – векторы переменных состояния моделей (14) и (15) соответственно; матрица
– векторы переменных состояния моделей (14) и (15) соответственно; матрица  – гурвицева в силу расчета коэффициентов
– гурвицева в силу расчета коэффициентов ![]() модели (9),
модели (9), ![]() ,
, ![]() ;
; ![]() ,
, ![]() и – матрицы перехода от модели вход-выход к модели вход-состояние-выход, причем, следуя [4], будем допускать, что
и – матрицы перехода от модели вход-выход к модели вход-состояние-выход, причем, следуя [4], будем допускать, что ![]() .
.
Введем в рассмотрение векторы отклонений
 , (15)
, (15)
 . (16)
. (16)
Дифференцируя уравнения (15) и (16), получаем
![]()
 , (17)
, (17)
 , (18)
, (18)
![]()
 , (19)
, (19)
 , (20)
, (20)
где было учтено, что ![]() и
и ![]() .
.
Положительно определенные матрицы ![]() и
и ![]() удовлетворяют уравнениям Ляпунова:
удовлетворяют уравнениям Ляпунова:
 , (21)
, (21)
 , (22)
, (22)
где ![]() и
и ![]() – положительно определенные матрицы.
– положительно определенные матрицы.
Условия работоспособности закона управления (8), (9) для стабилизации системы (10), (11), (17) – (20) приведены в следующей теореме.
Теорема. Пусть для стабилизации системы (5), (2) используется закон управления (8), (9) с описанными выше допущениями. Пусть положительные числа ![]() , , и
, , и ![]() , удовлетворяют условиям:
, удовлетворяют условиям:





![]()
![]()
 , (23)
, (23)


![]()
![]()
 , (24)
, (24)
 (25)
(25)

![]()
![]()

![]()
![]()
 , (26)
, (26)
где ![]() .
.
Тогда при отсутствии возмущения ( ) система (5), (2), (8), (9) экспоненциально устойчива в смысле нормы:
) система (5), (2), (8), (9) экспоненциально устойчива в смысле нормы:
 . (27)
. (27)
При наличии возмущения система L∞-устойчива, т. е. существуют числа ![]() такие, что:
такие, что:
 (28)
(28)
В обоих случаях выполняется целевое неравенство (4).
Доказательство. В силу ограниченности объема доклада приведем лишь основную схему доказательства. Рассмотрим функционал Ляпунова-Крассовского следующего вида:

 . (29)
. (29)
Дифференцируя (29) в силу уравнений (10) – (22) и принимая во внимание неравенства для удвоенных произведений вида ![]() , получаем:
, получаем:
![]()
![]()
![]()




![]()
 . (30)
. (30)
Если условия теоремы (23) – (26) выполнены, то из (30) следует следующее неравенство:

 . (31)
. (31)
Из (31) нетрудно показать сходимость переменных ![]() ,
, ![]() и
и ![]() в некоторую область, которая зависит от амплитуды возмущающего воздействия
в некоторую область, которая зависит от амплитуды возмущающего воздействия ![]() , а также от коэффициента
, а также от коэффициента ![]() и параметра
и параметра ![]() . Очевидно, что чем меньше
. Очевидно, что чем меньше ![]() и больше
и больше ![]() , тем меньше область, в которую попадут траектории
, тем меньше область, в которую попадут траектории ![]() ,
, ![]() и
и ![]() .
.
Переходя к неравенству для собственных чисел, из (31) и (29) получим:
 , (32)
, (32)
где ![]() ,
, ![]() , а
, а ![]() – максимальное и минимальное собственное число соответствующей матрицы. Из выражения (32) следует экспоненциальная устойчивость системы при
– максимальное и минимальное собственное число соответствующей матрицы. Из выражения (32) следует экспоненциальная устойчивость системы при  и, после преобразований, выражение (28) при наличии возмущения, что и требовалось доказать.
и, после преобразований, выражение (28) при наличии возмущения, что и требовалось доказать.
Случай неизвестной относительной степени
Представленный выше результат был получен для известной относительной степени. Однако, если известна только максимальная относительная степень ![]() , то закон управления вида (8), (9) не гарантирует устойчивость системы. В этом случае переформулируем закон управления (8), введя в него дополнительный множитель:
, то закон управления вида (8), (9) не гарантирует устойчивость системы. В этом случае переформулируем закон управления (8), введя в него дополнительный множитель:
 , (33)
, (33)
где ![]() и
и ![]() . Будем строить регулятор для максимальной заданной относительной степени.
. Будем строить регулятор для максимальной заданной относительной степени.
Тогда при ![]() получаем:
получаем:
![]()
![]()
 , (34)
, (34)
 , (35)
, (35)
где ![]() , и уравнение (35) описывает неучтенную динамику. Легко видеть, что система (34), (35) аналогична (6), (7). Таким образом, принцип состоит в том, что часть дополнительного множителя относится к системе, а часть – к неучтенной динамике. При этом относительная степень системы сводится к максимальной.
, и уравнение (35) описывает неучтенную динамику. Легко видеть, что система (34), (35) аналогична (6), (7). Таким образом, принцип состоит в том, что часть дополнительного множителя относится к системе, а часть – к неучтенной динамике. При этом относительная степень системы сводится к максимальной.
Адаптивный алгоритм настройки параметров
Заметим, что условия теоремы (23) – (26) не являются противоречивыми. При внимательном рассмотрении видно, что для их достижения необходимо при достаточно малом ![]() увеличивать параметры
увеличивать параметры ![]() и
и ![]() , причем
, причем ![]() . Однако с учётом наличия дополнительного варьируемого параметра
. Однако с учётом наличия дополнительного варьируемого параметра ![]() возникают дополнительные условия:
возникают дополнительные условия: ![]() . С учётом сказанного, можно предложить следующий алгоритм настройки. Параметр
. С учётом сказанного, можно предложить следующий алгоритм настройки. Параметр ![]() выбирается, исходя из алгоритма:
выбирается, исходя из алгоритма:
 , (36)
, (36)
где функция ![]() выбирается следующим образом:
выбирается следующим образом:
 (37)
(37)
Параметр ![]() настраивается следующим образом:
настраивается следующим образом:
 ,
, ![]() (38)
(38)
Параметр ![]() вычисляется на основе алгоритма:
вычисляется на основе алгоритма:
 , . (39)
, . (39)
Таким образом, коэффициент ![]() настраивается по линейному закону (36), (37) до тех пор, пока переменная
настраивается по линейному закону (36), (37) до тех пор, пока переменная ![]() не попадет в некоторую малую область, заданную разработчиком системы, а параметры
не попадет в некоторую малую область, заданную разработчиком системы, а параметры ![]() и
и ![]() настраиваются по квадратичному закону (38) и степенному закону более высокой степени (39) соответственно. В случае задачи слежения за ограниченным по амплитуде задающим воздействием функция
настраиваются по квадратичному закону (38) и степенному закону более высокой степени (39) соответственно. В случае задачи слежения за ограниченным по амплитуде задающим воздействием функция ![]() в алгоритме (37) заменяется на ошибку слежения
в алгоритме (37) заменяется на ошибку слежения  .
.
Пример работы алгоритма управления
Рассмотрим следующую систему:

![]() (40)
(40)
![]() ,
,  . (41)
. (41)
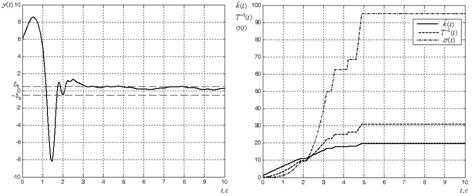
Известно, что максимальная относительная степень системы ![]() . Был построен регулятор вида (34), (9) для максимальной относительной степени.
. Был построен регулятор вида (34), (9) для максимальной относительной степени.
|
Таким образом, видно, что представленный закон управления обеспечивает сходимость выходной переменной в заданную окрестность ![]() =0,5.
=0,5.
Заключение
Рассмотрена задача стабилизации нелинейной системы (1), (2) в условиях полной параметрической неопределенности, наличия переменных параметров, неизвестного запаздывания по состоянию, возмущения и неучтенной динамики в случае использовании закона управления (8), (9). Показано, что для такого типа объектов опубликованный в [2] алгоритм управления при выполнении условий (23) – (26) обеспечивает сходимость выходной переменной или ошибки слежения в заданную окрестность положения равновесия. В случае, если известна только максимальная относительная степень, необходимо переформулировать закон управления (8) в форме (33).
ЛИТЕРАТУРА
1. Бобцов управления по выходной переменной для линейного объекта с неизвестными параметрами и динамической размерностью // , . – Научно-технический вестник СПбГУИТМО. – 2011. – № 4. – C. 160 – 161.
2. Бобцов по выходу нелинейными системами с запаздыванием в условиях неучтенной динамики // , . – Известия РАН. Теория и системы управления. – 2011. – № 3. – С. 79–87.
3. Дмитриев возмущения в задачах управления // , . – АиТ. 2006. – № 1. – С. 3–51.
4. Мирошник и адаптивное управление сложными динамическими системами // , , . – СПб.: Наука, 2000.
5. Ge S. S. Adaptive neural network control of nonlinear systems with unknown time delays // S. S. Ge, F. Hong, T. H. Lee. – IEEE Trans. Automat. Contr. – 2003. – vol.48, № 11 – pp.2004 – 2010.
6. Germani A. On the existence of the linearizing state-feedback for nonlinear delay systems // A. Germani, C. Manes. – Conf. Decision and Control. – 2001. – pp..
7. Hua C. Robust stabilization of uncertain dynamic time delay systems with unknown bounds of uncertainties. // C. Hua, C. Long, X. Guan. – Proc. Amer. Control Conf. – 2002. – pp..
8. Pyrkin А. Rejection of sinusoidal disturbance of unknown frequency for linear system with input delay // А. Pyrkin [et al.]. – Proc. Amer. Control Conf. – 2010.
9. Pyrkin А. Output control algorithm for unstable plant with input delay and cancellation of unknown biased harmonic disturbance // А. Pyrkin [et al.]. – Proc. 9th IFAC Workshop on Time Delay System. – 2010.
[1] Научный руководитель – (д. т.н., профессор, СПбНИУИТМО)
