
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Раздел 2.
Для того чтобы задать положение материальных точек в пространстве, надо выбрать тело отсчёта, поместить его в начало координат и взять часы – это система отсчёта.
Положение материальной точки в пространстве описывается радиус-вектором. Его проводят из начала координат к телу.
С течением времени положение материальной точки в пространстве изменяется и задаётся новым радиус-вектором.
Траектория – это линия, в каждой точке которой побывало тело.
Длина пути ![]() - это расстояние, которое прошло тело за время
- это расстояние, которое прошло тело за время ![]() .
.
Вектор перемещения – это векторная величина, совмещающая начальное и конечное положения точки.

 - тело движется по прямой.
- тело движется по прямой.

Средняя скорость – это вектор перемещения относительно промежутка времени, в течение которого произошло перемещение.

Если тело движется по прямой, то вектор сонаправлен с вектором перемещения.
При ![]() получаем мгновенную скорость
получаем мгновенную скорость ![]() . При
. При ![]()
![]() , но
, но ![]() !
!

![]()

Мгновенная скорость направлена по касательной к траектории по направлению движения.
Ускорение – это физическая величина, характеризующая быстроту изменения скорости по модулю и направлению.
Среднее ускорение:
![]()
При  :
:
![]()

Ускорение можно разложить на тангенциальную и нормальную составляющие.
![]() - направлен вдоль касательной,
- направлен вдоль касательной, ![]() - вдоль нормали.
- вдоль нормали.
![]()
![]()
![]() - быстрота изменения скорости по величине.
- быстрота изменения скорости по величине.

 и
и 
![]()
![]() - быстрота изменения скорости по направлению.
- быстрота изменения скорости по направлению.
Классификация движения.
1.  - равномерное прямолинейное.
- равномерное прямолинейное.

![]()

![]()
![]()

![]()
![]() - тело движется по прямой или окружности с
- тело движется по прямой или окружности с ![]() радиусом.
радиусом.
![]()
2.  - неравномерное прямолинейное
- неравномерное прямолинейное

![]()

![]()
![]() - тело движется по прямой или окружности с
- тело движется по прямой или окружности с ![]() радиусом.
радиусом.
Если  , то
, то 
![]()

Если , то 
![]()
3.  - равномерное криволинейное
- равномерное криволинейное
![]()

Если  - то равномерное движение по окружности.
- то равномерное движение по окружности.
4.  - неравномерное непрямолинейное
- неравномерное непрямолинейное
![]()
 При поступательном движении все точки твёрдого тела смещаются на один и тот же вектор перемещения. Поэтому мы брали вектор перемещения как основную характеристику поступательного движения.
При поступательном движении все точки твёрдого тела смещаются на один и тот же вектор перемещения. Поэтому мы брали вектор перемещения как основную характеристику поступательного движения.
При вращательном движении все точки тела движутся по окружностям разных радиусов.
Т. к.  и
и  , то
, то ![]() нельзя считать основной характеристикой вращательного движения.
нельзя считать основной характеристикой вращательного движения.
За одно и то же время точки смещаются на один и тот же угол. Поэтому, основной характеристикой такого перемещения является вектор углового перемещения.
Вектор углового перемещения – это вектор, направленный по оси вращения.
Он не имеет точки приложения, по модулю равен углу поворота. Его направление определяется по «правилу буравчика»: поступательное движение буравчика показывает направление вектора углового перемещения, если вращать буравчик в сторону вращения твёрдого тела.
Угловая скорость:
![]()
Направление вектора угловой скорости тоже определяется по «правилу буравчика».
Угловое ускорение:
Направление вектора углового ускорения не определяется по «правилу буравчика», а зависит от того, увеличивается угловая скорость или уменьшается: если увеличивается, то он сонаправлен с вектором угловой скорости, если уменьшается – то противонаправлен.
Если  , то
, то  - равноускоренное движение.
- равноускоренное движение.
Если , то . Следовательно:

![]()
Если  , то:
, то: 
![]()
Связь между линейными и угловыми величинами.
![]()
Направление вектора скорости определяется «правилом буравчика»: вращаем буравчик от ![]() к
к ![]() по наименьшему углу, если оси вектора выходят из одной точки. Тогда поступательное движение буравчика показывает направление вектора скорости.
по наименьшему углу, если оси вектора выходят из одной точки. Тогда поступательное движение буравчика показывает направление вектора скорости.
Вектор скорости всегда перпендикулярен плоскости, в которой лежат вектора угловой скорости и радиус-вектора.
 ,
, 

Раздел 3.
Первый закон Ньютона.
Тело находится в состоянии покоя или равномерного прямолинейного движения, пока на него не начнут действовать другие тела или поля.
Инерциальные и неинерциальные системы отсчёта.
Первый закон Ньютона фактически постулировал существование таких систем отсчёта, относительно которых тела движутся равномерно и прямолинейно до тех пор, пока на них не действуют другие тела или поля. Такие системы отсчёта называются инерциальными.
Если система отсчёта движется равномерно и прямолинейно относительно инерциальной системы отсчёта, то она инерциальная. Если ускоренно – то неинерциальная.
Земля – неинерциальная система отсчёта.
Сила – это векторная физическая величина, являющаяся мерой воздействия на данное тело со стороны других тел или полей. В результате этого взаимодействия тело либо деформируется (статическое проявление силы) либо изменяет скорость (динамическое). Сила имеет точку приложения, направление и величину.
Инертность – это способность тела препятствовать изменению скорости.
Масса – это мера инертности тела. Также масса отражает гравитационные свойства тела.
В настоящее время показано, что инертная и гравитационная массы с точностью до ![]() одинаковы, поэтому говорят просто о массе.
одинаковы, поэтому говорят просто о массе.
Свойства масс:
1. В классической механике масса – есть постоянная величина.
2. Масса – аддитивная величина, т. е. масса тела - есть сумма масс его частей.
3. Единица массы – 1 кг.
![]() - это сила, которая, действуя на тело массой в 1 кг, сообщает ему ускорение
- это сила, которая, действуя на тело массой в 1 кг, сообщает ему ускорение ![]() .
.
Импульс тела – векторная физическая величина, равная произведению массы тела на его скорость. Импульс направлен так же как и скорость.
![]()
Второй закон Ньютона.
Сила, действующая на тело равна изменению импульса тела.
![]()
Сила является причиной изменения импульса.
Принцип независимости сил.
Пусть на тело массой ![]() действует несколько сил:
действует несколько сил: ![]() . Тогда
. Тогда 
Принцип независимости сил.
Если на материальную точку действует одновременно несколько сил, то каждая из этих сил сообщает материальной точке ускорение согласно второму закону Ньютона, как будто других сил не было.
Третий закон Ньютона.
Действие тел друг на друга носит характер взаимодействия. Два тела действуют друг на друга с силами, равными по величине и противоположными по направлению. Они приложены к разным телам и имеют одинаковую природу. Эти силы всегда возникают парами.
Закон сохранения импульса.
Система тел – это совокупность взаимодействующих тел.
Внутренние силы – это силы, действующие между телами системы.
Внешние силы – это действующие на тела со стороны сил, не входящих в систему.
Рассмотрим систему тел: ![]() . Пусть на
. Пусть на ![]() действует со стороны второго тела сила
действует со стороны второго тела сила ![]() ,
, ![]() - стороны третьего и т. п. Пусть
- стороны третьего и т. п. Пусть ![]() - равнодействующая сил, действующих на первое тело.
- равнодействующая сил, действующих на первое тело.
Запишем второй закон Ньютона:
 (по третьему закону Ньютона)
(по третьему закону Ньютона)

Таким образом, по 3-му закону, сумма всех внутренних сил равна нулю.
Теперь имеем:
 (полный импульс системы)
(полный импульс системы)
![]()
Скорость изменения полного импульса системы равна сумме внешних сил, действующих на систему. Если система замкнута (т. е. сумма внешних сил равна нулю), то  , т. е. полный импульс системы остаётся постоянным.
, т. е. полный импульс системы остаётся постоянным.
Закон сохранения импульса.
Если система замкнута, то полный импульс системы сохраняется.
Свойства закона сохранения импульса.
1. ЗСИ – фундаментальный закон природы. Он выполняется для всех тел и для микрочастиц в том числе.
2. ЗСИ выполняется только в инерциальных системах отсчёта. Его можно применять и неинерциальных системах отсчёта, но с учётом сил инерции.
3. ЗСИ связан с однородностью пространства.
Однородность означает, что если систему тел перенести из одной области пространства в другую, при этом, сохранив взаимное расположение и скорости тел, которые существовали, то все процессы будут происходить так же как и в первой области.
Рассмотрим замкнутую систему. Переместим её из одного места пространства в другое. Пусть внутренние силы: ![]() . При действии сил совершается работа:
. При действии сил совершается работа: ![]() . Из однородности пространства следует, что
. Из однородности пространства следует, что ![]() , т. е.
, т. е.  при
при ![]() . Из этого условия получается закон сохранения импульса.
. Из этого условия получается закон сохранения импульса.
Движение центра масс.
Центром масс (или центром инерции) системы материальных точек называется воображаемая точка ![]() , положение которой характеризует распределение массы этой системы. Её радиус-вектор:
, положение которой характеризует распределение массы этой системы. Её радиус-вектор:
 ,
,
где ![]() и
и ![]() - соответственно масса и радиус-вектор материальной точки
- соответственно масса и радиус-вектор материальной точки ![]() ;
; ![]() число материальных точек в системе;
число материальных точек в системе; ![]() - масса системы.
- масса системы.
Скорость центра масс:
Учитывая, что  , а
, а ![]() , есть импульс
, есть импульс ![]() системы, можно написать:
системы, можно написать:
![]() ,
,
т. е. импульс системы равен произведению массы системы на скорость её центра масс.
Подставив это выражение в уравнение ![]() , получим
, получим
![]() ,
,
т. е. центр масс системы движется как материальная точка, в которой сосредоточена вся масса системы и на которую действует сила, равная геометрической сумме всех внешних сил, действующих на систему. Указанное выражение представляет собой закон движения центра масс.
В соответствии с выражением ![]() из закона сохранения импульса вытекает, что центр масс замкнутой системы либо движется прямолинейно и равномерно, либо остаётся неподвижным.
из закона сохранения импульса вытекает, что центр масс замкнутой системы либо движется прямолинейно и равномерно, либо остаётся неподвижным.
Раздел 4.
Энергия – это универсальная мера различных форм движения и взаимодействия.
Чтобы количественно охарактеризовать процесс обмена энергией, в механике вводится понятие работы силы.
Если тело движется прямолинейно и на него действует постоянная сила ![]() , составляющая с направлением перемещения некоторый угол
, составляющая с направлением перемещения некоторый угол ![]() , то работа этой силы равна произведению проекции силы
, то работа этой силы равна произведению проекции силы ![]() на направление перемещения (
на направление перемещения (![]() ), умноженной на перемещение точки приложения силы:
), умноженной на перемещение точки приложения силы:
![]()
В общем случае сила может изменяться как по модулю, так и по направлению, поэтому формулой пользоваться нельзя. Если, однако, рассмотреть элементарное перемещение ![]() , то силу
, то силу ![]() можно считать постоянной, а движение точки её приложения – прямолинейным. Элементарной работой силы
можно считать постоянной, а движение точки её приложения – прямолинейным. Элементарной работой силы ![]() на перемещении
на перемещении ![]() называется скалярная величина
называется скалярная величина
![]() ,
,
где ![]() - угол между векторами
- угол между векторами ![]() и
и ![]() ;
;  - элементарный путь;
- элементарный путь; ![]() - проекция вектора
- проекция вектора ![]() на вектор
на вектор ![]() .
.
Единица работы: Дж. 1Дж – это работы, совершаемая силой в 1Н на пути 1м.
Чтобы охарактеризовать скорость совершения работы вводится понятие мощности:
![]()
За время ![]() сила
сила ![]() совершает работу
совершает работу ![]() и мощность, развиваемая силой в данный момент времени:
и мощность, развиваемая силой в данный момент времени:
![]() ,
,
т. е. равна скалярному произведению вектора силы на вектор скорости, с которой движется точка приложения этой силы; ![]() - скалярная величина.
- скалярная величина.
Единица мощности – ватт. 1Вт – это мощность, при которой за время 1 с совершается работа в 1Дж.
Кинетическая энергия механической системы – это энергия механического движения этой системы.
Сила ![]() , действуя на покоящееся тело и вызывая его движение, совершает работу, а энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа
, действуя на покоящееся тело и вызывая его движение, совершает работу, а энергия движущегося тела возрастает на величину затраченной работы. Таким образом, работа ![]() силы
силы ![]() на пути, который тело прошло за время возрастания скорости от нуля до
на пути, который тело прошло за время возрастания скорости от нуля до ![]() , идёт на увеличение кинетической энергии
, идёт на увеличение кинетической энергии ![]() :
:
![]() .
.
Используя второй закон Ньютона ![]() и умножая обе части равенства на перемещение
и умножая обе части равенства на перемещение ![]() , получим:
, получим:
 .
.
Так как ![]() , то
, то  , откуда:
, откуда:  .
.
Таким образом, тело массой ![]() , движущееся со скоростью
, движущееся со скоростью ![]() , обладает кинетической энергией
, обладает кинетической энергией
![]()
Потенциальная энергия – механическая энергия системы тел, определяемая их взаимным расположением и характером сил взаимодействия между ними.
Пусть взаимодействие тел осуществляется посредством силовых полей, характеризующихся тем, что работа, совершаемая действующими силами при перемещении тела из одного положения в другое, не зависит от того, по какой траектории это перемещение произошло, а зависит только от начального и конечного положений. Такие поля называются потенциальными полями, а силы, действующие в них – консервативными. Если же работа, совершаемая силой, зависит от траектории перемещения тела из одной точки в другую, то такая сила называется диссипативной (например, сила трения).
Связь силы и потенциальной энергии.
Тело, находясь в потенциальном поле, обладает потенциальной энергией ![]() . Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счёт убыли потенциальной энергии:
. Работа консервативных сил при элементарном (бесконечно малом) изменении конфигурации системы равна приращению потенциальной энергии, взятому со знаком минус, так как работа совершается за счёт убыли потенциальной энергии:
![]()
Работа выражается как скалярное произведение силы ![]() на перемещение
на перемещение ![]() и это выражение можно записать в виде
и это выражение можно записать в виде
![]()
Следовательно, если известна функция ![]() , то из этой формулы можно найти силу
, то из этой формулы можно найти силу ![]() по модулю и направлению.
по модулю и направлению.
Потенциальная энергия может быть определена исходя из этого уравнения ![]() как
как
![]()
Наличие постоянной, однако, не отражается на физических законах, т. к. в них не входит, или разность потенциальных энергий в двух положениях тела, или производная потенциальной энергии по координатам. Поэтому потенциальную энергию тела в каком-то положении считают нулевой, в других отсчитывают относительно нулевого уровня.
Для консервативных сил  ,
,  ,
,  ,
,
или в векторном виде
![]() ,
,
где ![]() - градиент скаляра
- градиент скаляра ![]() :
:
![]()
Конкретный вид функции ![]() зависит от характера силового поля. Например, потенциальная энергия тела массой
зависит от характера силового поля. Например, потенциальная энергия тела массой ![]() , поднятого над Землёй, равна
, поднятого над Землёй, равна ![]() , упругодеформированного тела:
, упругодеформированного тела:  .
.
Закон сохранения энергии.
Рассмотрим систему материальных точек ![]() , движущихся со скоростями
, движущихся со скоростями ![]() . Пусть
. Пусть ![]() - равнодействующие внутренних консервативных сил, действующих на каждую из этих точек, а
- равнодействующие внутренних консервативных сил, действующих на каждую из этих точек, а ![]() - равнодействующие внешних сил, которые также будем считать консервативными. Кроме того, будем считать, что на материальные точки действуют ещё и внешние неконсервативные силы; равнодействующие этих сил, действующих на каждую из точек, обозначим
- равнодействующие внешних сил, которые также будем считать консервативными. Кроме того, будем считать, что на материальные точки действуют ещё и внешние неконсервативные силы; равнодействующие этих сил, действующих на каждую из точек, обозначим ![]() . При
. При ![]() массы точек постоянны и уравнения второго закона Ньютона для этих точек следующие:
массы точек постоянны и уравнения второго закона Ньютона для этих точек следующие:
Двигаясь под действием сил, точки системы за интервал времени ![]() совершают перемещения, соответственно равные
совершают перемещения, соответственно равные  . Умножим каждое из уравнений скалярно на соответствующее перемещение и, учитывая, что
. Умножим каждое из уравнений скалярно на соответствующее перемещение и, учитывая, что  , получим:
, получим:
Сложив эти уравнения, получим:
![]()
Первый член левой части равенства
 ,
,
где ![]() есть приращение кинетической энергии системы. Второй член
есть приращение кинетической энергии системы. Второй член ![]() равен элементарной работе внутренних и внешних консервативных сил, взятой со знаком минус, т. е. равен элементарному приращению потенциальной энергии
равен элементарной работе внутренних и внешних консервативных сил, взятой со знаком минус, т. е. равен элементарному приращению потенциальной энергии ![]() системы.
системы.
Правая часть равенства  задаёт работу внешних неконсервативных сил, действующих на систему. Таким образом, имеем:
задаёт работу внешних неконсервативных сил, действующих на систему. Таким образом, имеем:
![]()
При переходе из состояния 1 в состояние 2
![]() ,
,
т. е. изменение полной механической системы при переходе из одного состояния в другой, равно работе, совершённой при этом внешними консервативными силами. Если внешние неконсервативные силы отсутствуют, то из  следует, что
следует, что ![]() , откуда
, откуда
![]()
Это выражение и есть закон сохранения механической энергии:
В системе тел, между которыми действуют только консервативные силы, полная механическая энергия сохраняется, т. е. не изменяется со временем.
Графическое представление энергии. Потенциальные кривые.
Потенциальная кривая – это график зависимости потенциальной энергии от некоторого аргумента.
 Будем рассматривать только консервативные системы, т. е. системы, в которых взаимные превращения механической энергии в другие формы отсутствуют. Тогда справедлив закон сохранения энергии в форме
Будем рассматривать только консервативные системы, т. е. системы, в которых взаимные превращения механической энергии в другие формы отсутствуют. Тогда справедлив закон сохранения энергии в форме  . Рассмотрим графическое представление потенциальной энергии для тела в однородном поле тяжести и для упругодеформированного тела.
. Рассмотрим графическое представление потенциальной энергии для тела в однородном поле тяжести и для упругодеформированного тела.
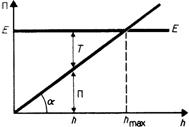
Потенциальная энергия тела массой ![]() , поднятого на высоту
, поднятого на высоту ![]() над поверхность Земли, равна
над поверхность Земли, равна ![]() .
.
График данной зависимости есть прямая линия, проходящая через начало координат. Угол наклона к оси ![]() тем больше, чем больше масса тела (т. к.
тем больше, чем больше масса тела (т. к. ![]() ).
).
Пусть полная энергия тела рана ![]() . На высоте
. На высоте ![]() тело обладает потенциальной энергией
тело обладает потенциальной энергией ![]() , которая определяется отрезком вертикали, заключённым между точкой
, которая определяется отрезком вертикали, заключённым между точкой ![]() на оси абсцисс и графиком
на оси абсцисс и графиком ![]() . Естественно, что кинетическая энергия
. Естественно, что кинетическая энергия ![]() задаётся ординатой между графиком
задаётся ординатой между графиком ![]() и горизонтальной прямой
и горизонтальной прямой ![]() . Из рисунка следует, что если
. Из рисунка следует, что если  , то
, то ![]() и
и  , т. е. потенциальная энергия становится максимальной и равной полной энергии.
, т. е. потенциальная энергия становится максимальной и равной полной энергии.
Из приведённого графика можно найти скорость тела на высоте ![]() :
:
 , т. е.
, т. е.  , откуда
, откуда  .
.
 Зависимость потенциальной энергии упругой деформации
Зависимость потенциальной энергии упругой деформации  от деформации
от деформации ![]() имеет вид параболы, где график заданной полной энергии тела – прямая, параллельная оси абсцисс. Абсцисса
имеет вид параболы, где график заданной полной энергии тела – прямая, параллельная оси абсцисс. Абсцисса ![]() определяет максимально возможную деформацию растяжения тела, а
определяет максимально возможную деформацию растяжения тела, а ![]() - сжатия.
- сжатия.
Из анализа графика вытекает, что при полной энергии, равной ![]() , тело не может сместиться правее
, тело не может сместиться правее ![]() и левее
и левее ![]() , т. к. кинетическая энергия не может быть отрицательной величиной, и, следовательно, потенциальная энергия не может быть больше полной. В таком случае говорят, что тело находится в потенциальной яме с координатами
, т. к. кинетическая энергия не может быть отрицательной величиной, и, следовательно, потенциальная энергия не может быть больше полной. В таком случае говорят, что тело находится в потенциальной яме с координатами ![]() .
.
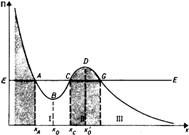 В общем случае потенциальная кривая может иметь довольно сложный вид. Проанализируем данную потенциальную кривую.
В общем случае потенциальная кривая может иметь довольно сложный вид. Проанализируем данную потенциальную кривую.
Если ![]() - заданная полная энергия частицы, то частица может находится только там, где
- заданная полная энергия частицы, то частица может находится только там, где  , т. е. в областях I и III. Переходит из одной в другую частица не может – ей препятствует потенциальный барьер
, т. е. в областях I и III. Переходит из одной в другую частица не может – ей препятствует потенциальный барьер ![]() , ширина которого равна интервалу значений
, ширина которого равна интервалу значений ![]() , при которых
, при которых ![]() , а его высота определяется разностью
, а его высота определяется разностью  . Для того, чтобы частица смогла преодолеть потенциальный барьер, ей необходимо сообщить дополнительную энергию, равную высоте барьера или превышающую её. В области I частица с полной энергией
. Для того, чтобы частица смогла преодолеть потенциальный барьер, ей необходимо сообщить дополнительную энергию, равную высоте барьера или превышающую её. В области I частица с полной энергией ![]() оказывается «запертой» потенциальной яме
оказывается «запертой» потенциальной яме ![]() и совершает колебания между точками с координатами
и совершает колебания между точками с координатами ![]() и
и ![]() .
.
В точке ![]() с координатой
с координатой ![]() потенциальная энергия минимальна. Т. к. действующая на частицу сила , а условие минимума потенциальной энергии
потенциальная энергия минимальна. Т. к. действующая на частицу сила , а условие минимума потенциальной энергии ![]() , то в этой точке
, то в этой точке ![]() . При смещении частицы из положения
. При смещении частицы из положения ![]() она испытывает действие возвращающей силы, поэтому положение
она испытывает действие возвращающей силы, поэтому положение ![]() является положением устойчивого равновесия. Указанные условия выполняются и в точке
является положением устойчивого равновесия. Указанные условия выполняются и в точке ![]() . Однако, эта точка является точкой неустойчивого равновесия, т. к. при смещении частицы из этого положения появляется сила, стремящаяся удалить её от этого положения.
. Однако, эта точка является точкой неустойчивого равновесия, т. к. при смещении частицы из этого положения появляется сила, стремящаяся удалить её от этого положения.
Раздел 5.
Момент инерции материальной точки массы ![]() , вращающейся относительно некоторой оси на расстоянии
, вращающейся относительно некоторой оси на расстоянии ![]() от неё, называется скалярная величина, равная произведению массы на квадрат расстояния
от неё, называется скалярная величина, равная произведению массы на квадрат расстояния

Момент инерции системы материальных точек – это сумма моментов инерции всех точек относительно оси вращения
Теорема Штейнера.
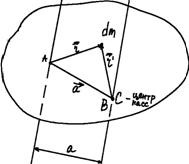
Момент инерции тела относительно любой оси вращения равен моменту его инерции относительно параллельной оси, проходящей через центр масс тела, сложенному с произведением массы на квадрат расстояния между осям:
:

Доказательство.

Проведём ось, параллельную данной через некоторую точку ![]() .
.
Поместим точку ![]() в центр масс системы.
в центр масс системы.

Значит, момент инерции относительно оси, походящей через точку ![]() и будет равным
и будет равным ![]() .
.
Момент инерции сплошного диска (цилиндра).
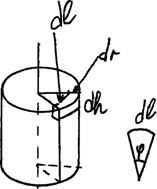

Момент инерции тонкостенного цилиндра.
Момент силы относительно точки ![]() – это физическая величина, определяемая векторным произведением радиуса-вектора, проведённого из точки
– это физическая величина, определяемая векторным произведением радиуса-вектора, проведённого из точки ![]() в точку
в точку ![]() приложения силы, на саму силу:
приложения силы, на саму силу:
Момент силы относительно оси – это скалярная величина ![]() , равная проекции на эту ось вектора
, равная проекции на эту ось вектора ![]() момента силы, определённого относительно произвольной точки
момента силы, определённого относительно произвольной точки ![]() данной оси. Значение момента
данной оси. Значение момента ![]() не зависит от выбора положения точки
не зависит от выбора положения точки ![]() на оси.
на оси.
Момент импульса точки ![]() относительно неподвижной точки
относительно неподвижной точки ![]() - это физическая величина, определяемая векторным произведением
- это физическая величина, определяемая векторным произведением
Момент импульса относительно неподвижной оси – это скалярная величина ![]() , равная проекции на эту ось вектора момента импульса, определённого относительно произвольной точки
, равная проекции на эту ось вектора момента импульса, определённого относительно произвольной точки ![]() данной оси. Значение
данной оси. Значение ![]() не зависит от положения точки на оси.
не зависит от положения точки на оси.
Момент импульса твёрдого тела.
Рассмотрим систему тел, которая вращается вокруг некоторой оси.

Каждая материальная точка движется по окружности:

Основной закон динамики вращательного движения:


Работа вращения.
![]() (
(![]() - длина дуги, на которую опирается хорда)
- длина дуги, на которую опирается хорда)
Кинетическая энергия при вращении.
 Пусть система материальных точек вращается относительно некоторой точки и все точки двигаются по окружностям разных радиусов.
Пусть система материальных точек вращается относительно некоторой точки и все точки двигаются по окружностям разных радиусов.

Пусть тело катится по дороге и скорость центра масс – это скорость поступательного движения.
Все точки на ободе колеса участвуют одновременно в двух движениях: поступательном (со скоростью ![]() ) и во вращательном (со скоростью
) и во вращательном (со скоростью ![]() , которая направлена по касательной). Тогда результирующая скорость:
, которая направлена по касательной). Тогда результирующая скорость: 

Точка ![]() находится на Земле
находится на Земле ![]()
 .
.
Перейдём в систему отсчёта, связанную с центром масс колеса. В этой системе отсчёта центр масс колеса покоится, а все остальные точки на ободе двигаются с одинаковыми скоростями.

Переходим обратно в систему отсчёта, связанную с Землёй:
 (
(![]() - скорость центра масс!)
- скорость центра масс!)
Закон сохранения момента импульса:
Момент импульса замкнутой системы сохраняется, т. е. не изменяется с течением времени.
Следует основного уравнения динамики вращательного движения следует, что если система замкнута (значит, момент силы равен нулю) то ![]() , откуда
, откуда

Свойства закона сохранения момента импульса.
ЗСМИ – фундаментальный закон природы. Он связан со свойством симметрии пространства – изотропностью, т. е. инвариантностью физических законов относительно выбора направления осей координат система отсчёта (относительно поворота замкнутой системы в пространстве на любой угол).
Сопоставление величин и уравнений поступательного и вращательного движений.
Поступательное | Вращательное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
