
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Алтайский государственный технический университет
им. »
Бийский технологический институт (филиал)
КОЛЕБАНИЯ В МЕХАНИЗМАХ
Методические рекомендации по курсу «Теория механизмов и машин»
для студентов специальностей 120100 «Технология машиностроения»,
230100 «Сервис транспортных и технологических машин и оборудования»,
171500 «Высокоэнергетические устройства автоматических систем»
всех форм обучения
Бийск
2006
УДК 621.01
Глотов, в механизмах: методические рекомендации по курсу «Теория механизмов и машин» для студентов специальностей 120100 «Технология машиностроения», 230100 «Сервис транспортных и технологических машин и оборудования», 171500 «Высокоэнергетические устройства автоматических систем» всех форм обучения / .
Алт. гос. техн. ун-т, БТИ. – Бийск.
Изд-во Алт. гос. техн. ун-та, 2006. – 18 с.
Методические рекомендации содержат сведения из теории механических колебаний; колебаний, вызванных различными факторами. Рассмотрены вопросы виброзащиты машин.
Рассмотрены и утверждены
на заседании кафедры
технической механики.
Протокол № 000 от 01.01.2001 г.
Рецензент: к. т.н., завкафедрой АРЛ,
ã БТИ АлтГТУ, 2006
1 ФРИКЦИОННЫЕ КОЛЕБАНИЯ В МЕХАНИЗМАХ
1.1 Сведения из теории механических колебаний
Механическими колебаниями (сокращенно колебаниями) называют движение механической системы, при котором хотя бы одна из обобщенных координат или их производных поочередно возрастает и убывает во времени. Различают с в о б о д н ы е колебания, происходящие без переменного внешнего воздействия и поступления энергии извне,
и в ы н у ж д е н н ы е, вызванные и поддерживаемые переменной во времени внешней силой.
Колебания называются п е р и о д и ч е с к и м и, если состояние механической системы, определяемое значениями обобщенных координат и их производных, повторяется через равные промежутки времени. Наименьший промежуток времени, через который повторяется состояние механической системы, называется периодом колебаний. Число периодов в единицу времени называется частотой; единица частоты – герц (1Гц=1/с). При свободных колебаниях частота зависит только от собственных свойств системы (но не от сил) и потому называется собственной частотой.
Простейшим видом периодических колебаний являются гармонические колебания, при которых обобщенная координата механической системы q прямо пропорциональна синусу от аргумента, линейно зависящего от времени:
| (1) |
где А – амплитуда;
λ – угловая частота;
λt + ![]() – фаза;
– фаза;
![]() – начальная фаза.
– начальная фаза.
Угловая частота гармонических колебаний связана с периодом колебаний tK соотношением λ=2![]() /tk или λ=2
/tk или λ=2![]() f, где f= 1/tк – частота в Гц. В дальнейшем везде под термином «частота» понимается угловая частота.
f, где f= 1/tк – частота в Гц. В дальнейшем везде под термином «частота» понимается угловая частота.
При исследовании колебаний в механизмах предпочитают в уравнении движения иметь коэффициент при старшей производной, равный единице. Тогда безразмерное линейное уравнение движения колебательного типа получает вид
| (2) |
где γ – коэффициент демпфирования (успокоения), выражающий действие диссипативных сил (сил сопротивления, зависящих от скоростей точек и вызывающих убывание её полной механической энергии);
λ – собственная частота механизма при отсутствии демпфирования (γ=0), k1 = k\T2;
х – входная величина.
При свободных колебаниях (х=0) характеристическое уравнение r2 + 2уr + λ2 =0 имеет пару сопряженных комплексных корней r1,2=-y±i – общее решение уравнения (2)
| (3) |
| (4) |
где λ =
=  – собственная частота механизма с учетом демпфирования;
– собственная частота механизма с учетом демпфирования;
C1 , С2 (или С, ) – постоянные, определяемые из начальных условий.
После дифференцирования по времени имеем:
| (5) |
или
| (6) |
При тех же начальных условиях постоянные С и ![]() имеют значения y=y0 .
имеют значения y=y0 .
При начальных условиях (t=0, y=y0) постоянные C и С, определяемые из формул (3) и (5), имеют значения:
| (7) |
| (8) |

Свободные колебания могут быть и при постоянной безразмерной силе х = хс. Тогда уравнение движения (2) приводят к однородному подстановкой
| (9) |
1.2 Колебания, вызываемые скачком силы трения
При торможении вращающегося или прямолинейно движущегося звена прижатием тормозной колодки, которая может иметь малые упругие перемещения, возникают колебания колодки относительно положения статического равновесия. В первом приближении возникновение этих колебаний можно объяснить скачком силы трения при переходе от покоя к движению.
|
|
|
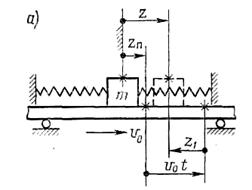
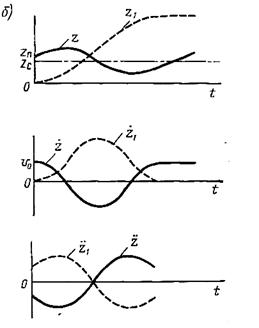
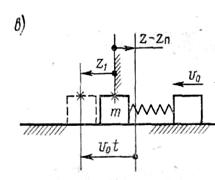
Рисунок 1 – Схемы перемещений ползуна
Пусть, например, ползун массой т (рисунок 1а) лежит на шероховатой поверхности, движущейся с постоянной скоростью v0; z – смещение ползуна от положения, при котором пружины не натянуты и не сжаты; с – коэффициент жесткости (суммарный – для двух пружин). Наличие силы трения приводит к тому, что поверхность при движении сначала увлекает за собой ползун, и как только упругая сила пружины Fпр=cz становится равной максимальной силе трения покоя Fтп, происходит срыв ползуна, а сила трения скачком падает до значения силы трения скольжения FT. Скачок силы трения F=FTn-FT вызывает упругие колебания ползуна, которые называют релаксационными, так как после срыва ползуна сила упругости пружины некоторое время продолжает расти, а затем ослабевает (релаксирует).
До срыва ползун движется равномерно со скоростью z = v0. После срыва его движение определяется уравнением:
| (10) |
при начальных условиях: t=0, z=zn, z=v0,
где zn =Fтп / c – смещение ползуна в момент срыва.
Введем безразмерное перемещение
y=z/zc,
где zc = Fт /c – статическое перемещение пружины под действием силы FT, когда уравнение (10) получает вид уравнения (2) при γ = 0, λ2 =с/т, х=1, K1 = λ2.
Подстановкой y = y1 + l приводится к однородному уравнению, решение которого по уравнению (4) имеет вид
| (11) |
| (12) |
Возвращаясь к переменной z, при начальных условиях y0 =Zn/zc и y0=v0 / zc получаем
| (13) |
где
| (14) |
Отсюда скорость и ускорение ползуна
| (15) |
На рисунке 1б показаны графики изменения z, , в зависимости от времени t, причем график z(t) дает также в другом масштабе график изменения упругой силы пружины. Штрихпунктирной линией показано значение z в положении статического равновесия. В отличие от обычных гармонических колебаний еще до истечения времени, равного периоду колебаний с собственной частотой, скорость ползуна, достигнув значения vQ, перестает возрастать, несмотря на то, что ускорение ползуна в этот момент времени остается положительным. Скорость ползуна не может превысить скорость движущейся поверхности v0, так как при z>v0 изменяется знак относительной скорости z-v0 и, следовательно, изменяется направление силы трения, которая из силы движущей для ползуна превращается в силу сопротивления. В этот момент времени движущаяся со скоростью v0 плоскость подхватывает ползун, их относительное движение прекращается, и сила трения вновь становится силой трения покоя до следующего срыва ползуна.
1.3 Прерывистое движение ползуна в направляющих
Динамическая модель (см. рисунок 1а) путем обращения движения приводится к модели, соответствующей медленным движениям ползуна в направляющих металлорежущих станков и некоторых приборов (рисунок 1в). Предполагается, что на ползун действует только сила трения в направляющих и сила упругости пружины Fпр, которая имитирует влияние упругости звеньев. Правый конец пружины движется с постоянной скоростью v , а ее левый конец получает перемещение z1, отсчитываемое от положения, соответствующего началу движения ползуна массы т. Коэффициент жесткости пружины – с.
Как и в предыдущем примере, считается, что сила трения покоя Fтп больше силы трения скольжения Fт. Начало движения ползуна (срыв) произойдет, когда сила упругости пружины станет равной FTn.
В момент времени t сила упругости пружины, которая является движущей, имеет значение Fnр=Fтп - c(z1 - vot), а сила трения FT является силой сопротивления. Поэтому дифференциальное уравнение движения ползуна имеет вид:
| (16) |
Из условий обращения движения видно, что перемещение ползуна z (см. рисунок 1в) равно относительному перемещению ползуна по плоскости (см. рисунок 1а):
| (17) |
Уравнение движения (12) после замены переменной z1 на z по условию (13) совпадает с уравнением (10). Поэтому решение уравнения (12) находим из решения (11) после подстановки (13):
где | (18) |
| (19) |
После дифференцирования по времени имеем:
| (20) |
Графики z1 ,![]() 1 и
1 и ![]() 1 показаны на рисунке 1б пунктирными линиями. Сравнивая движение ползуна в двух рассмотренных случаях, видим, что участку совместного движения ползуна (колодки тормоза) и плоскости с постоянной скоростью v0 соответствует выстой ползуна в направляющих, моменту срыва колодки – момент начала движения ползуна после выстоя и так далее.
1 показаны на рисунке 1б пунктирными линиями. Сравнивая движение ползуна в двух рассмотренных случаях, видим, что участку совместного движения ползуна (колодки тормоза) и плоскости с постоянной скоростью v0 соответствует выстой ползуна в направляющих, моменту срыва колодки – момент начала движения ползуна после выстоя и так далее.
1.4 Колебания при силах трения, зависящих от скорости скольжения
В предыдущих примерах предполагалось, что сила трения не зависит от скорости скольжения. Теперь покажем, что учет зависимости силы трения от скорости скольжения позволяет выявить такие режимы движения, которые не обнаруживаются при постоянной силе трения.
Рассмотрим, например, возможные режимы колебаний ползуна, прижатого к поверхности, движущейся с постоянной скоростью (см. рисунок 1а), при условии, что зависимость силы трения FT от скорости скольжения vc=v0 - z представлена экспериментальной кривой (рисунок 2а), на которой можно отметить значение скорости скольжения vm, соответствующее минимуму силы трения. Если сила трения уменьшается с увеличением скорости скольжения, то характеристику силы трения на этом участке будем называть падающей, если увеличивается, то возрастающей. Для выявления особенностей режимов движения ползуна достаточно заменить реальную характеристику силы трения ее приближенным выражением, получаемым при линеаризации участков с возрастающей и убывающей силой трения (рисунок 2б).
Рисунок 2 – График зависимости силы трения от скорости скольжения
Обозначим через FTm значение силы Fт при скорости скольжения vm, определяющей границу между падающей и возрастающей характеристиками. Тогда для возрастающей характеристики:
FT = FTm + kB (v0 - | (21) |
где kB – положительный коэффициент, определяющий наклон возрастающей характеристики.
Соответственно для падающей характеристики
Fт = Fтм+ ku (vm -v0 + | (22) |
где ku – положительный коэффициент, определяющий наклон падающей характеристики.
Предположим, что вследствие случайного толчка ползун выведен из положения статического равновесия, определяемого координатой zc = FT0/c, где FT0 – значение силы трения при скорости скольжения, равной v0, т. е. при z=0. Тогда ползун будет совершать колебания, характер которых зависит от соотношения между скоростями v0 и vm. При vo>vm начало движения ползуна соответствует силе трения для возрастающей характеристики, и уравнение движения ползуна имеет вид
| (23) |
При vo<vm, т. е. для падающей характеристики, имеем
| (24) |
Уравнения (23) и (24) отличаются знаком члена, содержащего z. Если эти уравнения считать уравнениями возмущенного движения, то по знакам коэффициентов их характеристических уравнений можно судить об устойчивости движения. При возрастающей характеристике силы трения все коэффициенты характеристического уравнения положительны. Этого признака достаточно для установления асимптотической устойчивости систем, движение которых описывается уравнениями не выше второго порядка. При падающей характеристике возможно получение неустойчивых режимов, так как в характеристическом уравнении имеется отрицательный коэффициент. Такое же заключение можно сделать, решая уравнения (23) и (24). Для этого введем безразмерное перемещение y = z/zc. Тогда уравнение (23) принимает вид:
| (25) |
где Т22=m/с;
T1=Kв/c.
При T1>2T2 уравнение (25) относится к апериодическому типу, а при T1<2T2 – к колебательному. Для обычных характеристик сил трения коэффициент Kв имеет небольшую величину и T1<2Т2, т. е. уравнение (25) принадлежит к колебательному типу и может быть представлено в форме уравнения (2), где 2γ= = Kв /m λ.2 = c/m; k1 =λ2 ; x=l. После подстановки y = y1 + l оно приводится к однородному, решение которого по уравнению (4) с учетом указанной подстановки имеет вид:
| (26) |
где
| (27) |
| (28) |
Возвращаясь к переменной z при начальных условиях y0=zo/zc;![]() 0=0, получаем
0=0, получаем
| (29) |
| (30) |
Из формулы (29) видно, что ползун совершает затухающие колебания, так как показатель степени при числе е имеет знак минус, и потому коэффициент при sin (λ*t+Q) с увеличением времени t стремится к нулю. Скорость ползуна ![]() получаем дифференцированием уравнения (29) по времени:
получаем дифференцированием уравнения (29) по времени:
| (31) |
где Сz и ![]() берутся из формулы (30).
берутся из формулы (30).![]()
Исключая время t из формул (29) и (31), получаем зависимость ![]() (z), графическое изображение которой на фазовой плоскости, т. е. в координатах
(z), графическое изображение которой на фазовой плоскости, т. е. в координатах ![]() и z, представляется спиралью, стремящейся к точке статического равновесия (zС, 0) (рисунок 3а). Указанная спираль называется фазовой траекторией системы, а точка (zс, 0) есть особая точка этой траектории, называемая устойчивым фокусом. Пунктиром показана замкнутая фазовая траектория для незатухающих колебаний при γ=0 и начальных условиях: z=z0;
и z, представляется спиралью, стремящейся к точке статического равновесия (zС, 0) (рисунок 3а). Указанная спираль называется фазовой траекторией системы, а точка (zс, 0) есть особая точка этой траектории, называемая устойчивым фокусом. Пунктиром показана замкнутая фазовая траектория для незатухающих колебаний при γ=0 и начальных условиях: z=z0; ![]() =0.
=0.
| |
Рисунок 3 – Фазовая траектория системы |
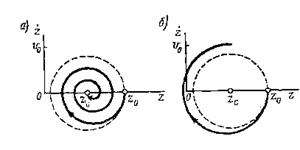
Другой характер движения получится при падающей характеристике силы трения. В решении уравнения (24) показатель степени при числе е имеет знак плюс, и потому коэффициент при sin (λ* t+ Q) с увеличением времени стремится к бесконечности, т. е. амплитуды колебаний возрастают по показательному закону. Графическое изображение зависимости ![]() (z) на фазовой плоскости представляется спиралью (рисунок 3б), которая проходит через точку (z0, 0) и может рассматриваться выходящей из точки (zc, 0) статического равновесия при t . Точка (zc, 0) в этом случае называется неустойчивым фокусом.
(z) на фазовой плоскости представляется спиралью (рисунок 3б), которая проходит через точку (z0, 0) и может рассматриваться выходящей из точки (zc, 0) статического равновесия при t . Точка (zc, 0) в этом случае называется неустойчивым фокусом.
Следовательно, как и было показано ранее из условий устойчивости движения, при падающей характеристике силы трения система неустойчива, и после любого сколь угодно малого возмущения происходит самовозбуждение колебаний с возрастающими амплитудами. Однако это возрастание не будет происходить неограниченно, так как одновременно увеличивается скорость ![]() , и при
, и при ![]() =v0 скорость скольжения становится равной нулю (перемена знака силы трения). При обратном ходе ползуна возможен также переход на участок возрастающей характеристики силы трения.
=v0 скорость скольжения становится равной нулю (перемена знака силы трения). При обратном ходе ползуна возможен также переход на участок возрастающей характеристики силы трения.
1.5 Автоколебания
Автоколебаниями называют колебания, поддерживаемые поступлением энергии от
неколебательного источника, которое регулируется движением самой системы. Под регулированием поступления энергии понимается, что силы, подводимые к системе от источника энергии, меняются во времени в зависимости от самого движения системы и при отсутствии движения равны нулю. Примером автоколебаний могут служить незатухающие колебания маятника часов, которые поддерживаются поступлением энергии от движения гири или пружины.
Рассмотренные фрикционные колебания также являются автоколебаниями, так как они поддерживаются поступлением энергии от неколебательного источника – плоскости, движущейся с постоянной скоростью v0. Энергия, доставляемая этим источником в систему, равна работе сил трения. Регулирование поступления энергии в зависимости от движения системы выражается изменением силы трения, которая при отсутствии движения равна нулю, а во время движения или изменяется от Fтп до Fт (скачок силы трения), или же изменяется в зависимости от относительной скорости ![]() - v0.
- v0.
Фазовая траектория ![]() (z) при автоколебаниях, вызываемых скачком силы трения, имеет вид замкнутой кривой, повторяющейся во времени (рисунок 4). При силах трения, зависящих от скорости, фазовую траекторию в виде замкнутой кривой можно рассматривать как граничный или предельный случай по отношению к режимам с затухающими или возрастающими амплитудами.
(z) при автоколебаниях, вызываемых скачком силы трения, имеет вид замкнутой кривой, повторяющейся во времени (рисунок 4). При силах трения, зависящих от скорости, фазовую траекторию в виде замкнутой кривой можно рассматривать как граничный или предельный случай по отношению к режимам с затухающими или возрастающими амплитудами.
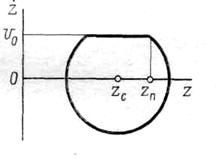
Рисунок 4 – Фазовая траектория при автоколебаниях
2 ВИБРОЗАЩИТА МАШИН
2.1 Виброзащитные системы
Колебания в машинах могут быть полезными, когда само действие машины основано на эффекте колебаний (вибрационные транспортеры, сита, виброударные машины для забивки свай и т. п.), но чаще они являются нежелательными, так как снижают надежность машин, вызывают шум и оказывают вредное влияние на организм человека.
Характеристики колебательных систем (амплитуды, частоты, силы) можно уменьшить до допускаемых пределов выбором параметров соответствующей динамической модели. Например, динамические нагрузки в кулачковых механизмах могут быть уменьшены за счет выбора профиля кулачка. Снизить уровень колебаний иногда удается применением демпферов – устройств для увеличения сил сопротивления, зависящих от скорости. Удачно применяются демпферы в системах, подверженных ударным воздействиям. Но нельзя утверждать, что во всех случаях демпфирование приводит к уменьшению колебаний. В тех случаях, когда выбором параметров системы или демпфированием не удается снизить уровень колебаний, применяют дополнительные устройства для защиты от вибраций – виброзащитные системы.
Различают два основных способа виброзащиты: виброгашение и виброизоляцию. Виброгашение основано на присоединении к машине дополнительных колебательных систем, называемых динамическими виброгасителями, которые создают динамические воздействия, уменьшающие интенсивность колебаний.
Виброизоляция основана на разделении исходной системы на две части и соединении этих частей посредством виброизоляторов. Одна из этих частей называется защищаемым объектом, а другая – источником возбуждения.
На рисунке 5а показана динамическая модель машины, установленной на фундаменте. Машина с общей массой т является источником возбуждения, а фундамент – защищаемым объектом. Виброизолятор, помещенный между защищаемым объектом и источником возбуждения, имеет приведенный коэффициент жесткости с и приведенный коэффициент демпфирования β.
Рисунок 5 – Динамическая модель машины на фундаменте |
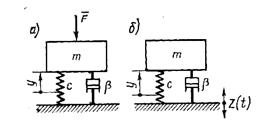
Приведенный коэффициент жесткости определяется из условия равенства потенциальной энергии виброизолятора и эквивалентной пружины. Приведенный коэффициент демпфирования определяется из условия равенства работ, затрачиваемых на трение в виброизоляторе и в эквивалентном демпфере.
Уравнение движения массы т имеет вид
| (32) |
где у – перемещение, отсчитываемое от положения статического равновесия;
F (t) – внешняя сила, выражаемая известной функцией времени;
Q (у, у) – обобщенная (приведенная) реакция виброизолятора, которая в общем случае зависит от перемещения у и скорости у.
Назначение виброизолятора в этом случае состоит в уменьшении динамической (переменной) составляющей реакции Q, передаваемой на фундамент при заданном воздействии силы F.
На рисунке 5б показан другой случай, при котором динамические воздействия приложены к некоторому основанию (например, к стойке механизма) в виде его колебаний по закону z (t).
Уравнение движения массы т при колебаниях основания (источника возбуждения) имеет вид
| (33) |
где z – перемещение основания.
2.2 Динамический виброгаситель
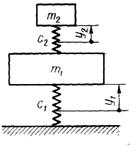
Простейший виброгаситель, предназначенный для гашения колебаний массы mi, вызываемых гармонической силой F = Fosinωt, состоит из дополнительной массы т2, соединенной с основной массой mi упругим элементом с коэффициентом жесткости с2 (рисунок 6). Коэффициент жесткости упругого элемента, расположенного между основанием и массой m1, равен c1. Перемещения масс y1 и у2 отсчитываются от положения статического равновесия.
Рисунок 6 – Простейший виброгаситель
 |
Уравнения движения указанной двухмассной динамической модели имеют такой вид:
| (34) |
| (35) |
Установившиеся вынужденные колебания с частотой вынуждающей силы описываются решением
| (36) |
Подставляя это решение в систему уравнений движения, получаем два уравнения с двумя неизвестными амплитудами A1 и A2:
| (37) |
Отсюда
| (38) |
| (39) |
где Δ – определитель, составленный из коэффициентов A1 и A2 в системе уравнений
|
При величине Δ= 0 амплитуды А1 и А2 стремятся к бесконечности (резонанс), что соответствует совпадению частоты вынуждающей силы с одной из собственных частот системы, которые находятся из частотного уравнения
| (40) |
Если Δ≠0, то из уравнения (38) можно найти такую частоту ω, при которой А1 = 0. Такое состояние системы называют антирезонансом, а соответствующую частоту ω* антирезонансной. Внашем случае
| (41) |

т. е. антирезонансная частота равна собственной частоте дополнительного осциллятора, состоящего из груза с массой т2 и упругого элемента с коэффициентом жесткости с2.
Явление антирезонанса может быть использовано для виброгашения. Для этого достаточно подобрать массу m2 и коэффициент жесткости с2 так, чтобы удовлетворялось равенство
| (42) |
 .
.Для гашения крутильных колебаний в двухмассной системе с приведенными моментами инерции J1 и J2 и приведенным коэффициентом жесткости с аналогично устанавливается дополнительный груз с моментом инерции J0 на валу с коэффициентом жесткости, равным с0 (рисунок 7). Значения J0 и с0 подбираются по условию
 . (43)
. (43)
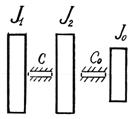
Рисунок 7 – Схема гашения крутильных колебаний
Виброгашение по указанному принципу эффективно только для одной фиксированной частоты вращения. Уже небольшое отступление от частоты, определяемой соотношением (42), может привести не к уменьшению, а к увеличению амплитуды колебаний. Кроме того, без виброгасителя была одна резонансная частота, равная c1 /m1 , а с виброгасителем будет две резонансные частоты, получаемые из решения частотного уравнения (40), т. е. увеличивается вероятность возникновения резонансного режима.
Чтобы расширить диапазон частот, в котором происходит гашение колебаний, вводится дополнительное сопротивление. С этой же целью применяются виброударные гасители колебаний, в которых дополнительная масса устанавливается с зазором, и эффект виброгашения достигается как за счет динамического взаимодействия основной системы и виброгасящего элемента в результате их соударения, так и за счет диссипации энергии вследствие того, что эти соударения не совершенно упруги.
Наиболее совершенными являются регулируемые виброгасители, в которых при изменениях частоты вынуждающей силы автоматически изменяется собственная частота гасителя.
2.3 Линейный виброизолятор
Уравнение движения (32) приводится к линейному, если принять, что приведенная реакция виброизолятора Q складывается из приведенной силы упругости, линейно зависящей от перемещения, и приведенной силы трения, линейно зависящей от скорости
| (44) |
Вводя обозначения λ2 = с/т и 2γ=β/т, приводим уравнение (32) к следующему виду
| (45) |
Уравнение (33) также приводится к этому виду, если принять
| (46) |
Пусть, например, внешняя сила F(t) изменяется по гармоническому закону
| (47) |
Тогда уравнение (44) имеет вид
| (48) |
Решение этого уравнения для установившихся вынужденных колебаний, то есть после затухания свободных и сопровождающих колебаний, получаем в виде
| (49) |
где Ө – сдвиг фаз силы и перемещения, определяемый выражением
| (50) |
Дифференцирование выражения (49) дает
| (51) |
 .
.Подставляя значение y и ![]() в уравнение (44), получаем силу, передаваемую виброизолятором
в уравнение (44), получаем силу, передаваемую виброизолятором
| (52) |

или
| (53) |
где Кдин – коэффициент динамичности, равный отношению амплитуды вынужденных колебаний по формуле (49) к максимальному перемещению, вызываемому статическим действием силы
| (54) |
 .
.Выражение (53) может быть преобразовано к виду
| (55) |
где  .
.
Следовательно, максимальное значение силы Q равно
Qmax = KдинH | (56) |
Отношение наибольшей силы, передаваемой виброизолятором, к амплитуде вынуждающей силы называется коэффициентом передачи силы К. В нашем примере
| (57) |
Заметим, что коэффициент передачи силы совпадает с коэффициентом динамичности только при γ=0, то есть при отсутствии демпфирования.
Коэффициент передачи сил характеризует качество виброзащитной системы. При жестком соединении защищаемого объекта и источника возбуждения К=1; при К<1. Виброзащитная система эффективна, так как амплитуда силы, передаваемой виброизолятором, уменьшается; при К>1 применение виброизолятора нецелесообразно. На рисунке 8 изображен график зависимости коэффициента передачи силы от отношения частот ω/λ при различных значениях 2γ/λ. Все кривые К(ω/λ) независимо от величины 2γ/λ, характеризующей демпфирование системы, пересекаются в точке с координатами (![]() ,1 ).
,1 ).
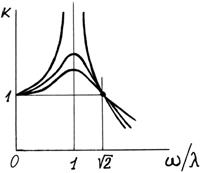
Рисунок 8 – График зависимости коэффициента передачи силы от отношения частот ω/λ
Следовательно, для того чтобы максимальное значение силы Q, передаваемой виброизолятором, было меньше амплитуды вынуждающей силы, должно быть выполнено условие
| (58) |
Обычно принимают ω/λ=4. Если сила F(t) представлена суммой гармонических компонентов
F(t)=∑Fkcos(ωkt+ θk), | (59) |
то под частотой ω в формуле (58) надо понимать наименьшую из частот силы ωк . Вибрационное воздействие силы F(t) в этом случае называется полигармоническим.
Из (53) следует, что для улучшения свойств линейного виброизолятора надо уменьшать собственную частоту системы λ, а следовательно, и коэффициент жесткости с. Подставляя в соотношение ω/λ![]() 4 величину λ2 = с/m, получаем условие для определения коэффициента жесткости
4 величину λ2 = с/m, получаем условие для определения коэффициента жесткости
с | (60) |
По этому условию подбирают параметры виброизолятора, влияющие на его жесткость. Увеличение демпфирования при ω/λ>![]() ухудшает виброзащитные свойства виброизолятора (см. рисунок 8). Поэтому считается достаточным слабое демпфирование, обеспечивающее затухание свободных и сопровождающих колебаний. Амплитуда вынужденных колебаний виброизолятора при слабом демпфировании
ухудшает виброзащитные свойства виброизолятора (см. рисунок 8). Поэтому считается достаточным слабое демпфирование, обеспечивающее затухание свободных и сопровождающих колебаний. Амплитуда вынужденных колебаний виброизолятора при слабом демпфировании
При условии λ<ω
А = | (61) |
При условии ![]() <
<![]()
А = | (62) |
Рассмотрим теперь случай, когда основание совершает колебания по закону
Z =A1sinωt. | (63) |
Если приведенную реакцию виброизолятора определять по формуле (44), то уравнение движения (33) принимает вид
m(y+z)= - cy-βy, | (64) |
где y – перемещение защищаемого объекта относительно основания.
С учетом формулы (63) получаем
| (65) |
где 2γ=β/m ,
λ2=c/m.
Уравнение (65) совпадает с уравнением (48) при условии, что H=mA![]() .
.
Используя решение (49) и принимая во внимание, что абсолютное перемещение защищаемого объекта ya есть сумма перемещения основания z и относительного перемещения y, получаем
y | (66) |
 t.
t.При слабом демпфировании λ<ω имеем
y =А | (67) |
Отсюда следует, что амплитуда колебаний защищаемого объекта относительно неподвижной системы координат может быть как угодно малой в случае, если его собственная частота λ мала по сравнению с частотой колебаний основания.
2.4 Особенности нелинейного виброизолятора
Возникновение нелинейностей в системах виброизоляции связано в первую очередь с повышением уровня колебаний и увеличением размеров виброизоляторов в современных машинах. Известно, что любой реальный виброизолятор может иметь линейную упругую характеристику только на некотором участке изменения деформации. С увеличением силы, действующей на виброизолятор, увеличивается его ход, максимальное перемещение и рабочий участок упругой характеристики выходит за пределы линейного участка. При больших силах, действующих на виброизолятор, и необходимости ограничения его хода умышленно приходится выполнять характеристику нелинейной.
При больших нагрузках на виброизолятор нелинейной становится и характеристика демпфера, выражающая зависимость силы сопротивления от скорости перемещения виброизолятора. Эта нелинейность проявляется особенно ярко при увеличении демпфирования, которое становится необходимым в тех случаях, когда не удается избежать резонанса.
3 КОНТРОЛЬНЫЕ ВОПРОСЫ
1. Виды колебаний в механизмах (свободные и вынужденные, периодические) и их характеристика.
2. Что представляют собою автоколебания?
3. Виброзащита и основные ее способы.
4. Что такое динамический виброгаситель?
5. Что представляет собою линейный виброизолятор?
6. Особенности нелинейного виброизолятора.
Литература
1. Бутенин, колебаний / – М.: Высшая школа, 1983. – 264 с.
2. Теория механизмов и машин / под ред. . – М.: Высшая школа, 1987. – 496 с.
3. Бабанов, колебаний / – М.: Наука, 1965. – 559 с.
4. Ден-Гарнтог, Дм. П. Механические колебания / Дм. П. Ден-Гарнтог. – М.: Госиздат физмат лит-ра, 1980. – 580 с.
5. Cветлицкий, и примеры по теории колебаний: учебное пособие /
. – М.: Изд-во МГТУ им. , 1994. – Ч. I. – 308 с.
6. Cветлицкий, и примеры по теории колебаний: учебное пособие /
. – М.: Изд-во МГТУ им. , 1998. – Ч. II. – 264 с.
СОДЕРЖАНИЕ
1 ФРИКЦИОННЫЕ КОЛЕБАНИЯ В МЕХАНИЗМАХ ……………………………………...3
1.1 Сведения из теории механических колебаний ……………………………………….3
1.2 Колебания, вызываемые скачком силы трения ………………………………………4
1.3 Прерывистое движение ползуна в направляющих ………………………………......5
1.4 Колебания при силах трения, зависящих от скорости скольжения ………………...6
1.5 Автоколебания ………………………………………………………………………….8
2 ВИБРОЗАЩИТА МАШИН …………………………………………………………………..9
2.1 Виброзащитные системы ………………………………………………………………9
2.2 Динамический виброгаситель ……………………………………………………......10
2.3 Линейный виброизолятор …………………………………………………………….12
2.4 Особенности нелинейного виброизолятора.………………………………………...14
3 КОНТРОЛЬНЫЕ ВОПРОСЫ ……………………………………………………………….15
Литература..………………………………………………………………………………..........16
КОЛЕБАНИЯ В МЕХАНИЗМАХ
Методические рекомендации по курсу «Теория механизмов и машин» для студентов
специальностей 120100 «Технология машиностроения», 230100 «Сервис транспортных и технологических машин и оборудования», 171500 «Высокоэнергетические устройства автоматических систем» всех форм обучения
Редактор
Технический редактор
Корректор
Подписано в печать 17.01.2006. Формат 61´86 1/8
Усл. п. л. – 2,09. Уч. изд. л. – 2,25.
Печать – ризография, множительно-копировальный
аппарат «RISO TR-1510»
Тираж 50 экз. Заказ 2006-06.
Издательство Алтайского государственного
технического университета,
г. Барна.
Оригинал-макет подготовлен ВЦ БТИ АлтГТУ.
Отпечатано в ВЦ БТИ АлтГТУ.
9
