
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 531.383-11:531.714.7;
А. А. БЕЛОГУРОВ[*], Н. В. МОИСЕЕВ
(ГНЦ РФ «ЦНИИ «Электроприбор», Санкт-Петербург)
Экспериментальное определение влияния внешних факторов на параметры чувствительного элемента и характеристики ММГ RR-типа
Представлены результаты испытаний компенсационного микромеханического гироскопа RR-типа. Разработана методика, основанная на анализе сигналов систем управления, вырабатываемых интегральной схемой (ИС), встроенной в гироскоп, для определения добротности подвеса инерциальной массы по оси первичных колебаний и величины квадратурной помехи, по изменению которой после корпусирования можно судить о качестве выполнения этой операции.
Введение
Микромеханический гироскоп (ММГ) относится к классу инерциальных датчиков. Диапазон применения достаточно широк: от подушек безопасности и антиблокировочных автомобильных устройств до интегрированных со спутниковыми навигационными системами малогабаритных инерциальных навигационных систем, обеспечивающих определение параметров ориентации координат летательных аппаратов, надводных и подводных аппаратов, наземных транспортных средств, роботов и др. [4]
Процедуры калибровки и испытаний весьма трудоемки и продолжительны по времени, и после их проведения значительная часть ММГ может быть отбракована. Поэтому целесообразна ранняя диагностика и отбраковка собранных ММГ. Эта отбраковка может быть основана на данных о характеристиках чувствительного элемента (ЧЭ) после сборки.
На данной стадии работы были исследованы две характеристики: квадратурная помеха и амплитуда сигнала управления первичными колебаниями.
Микромеханический гироскоп ММГ
Исследуемый ММГ разработки ЦНИИ «Электроприбор» является вибрационным гироскопом RR-типа. В ММГ RR-типа реализуется колебательное движение ротора в режимах первичных и вторичных колебаний.
ММГ выполнен в виде сборки из ЧЭ и ИС, расположенных в керамическом корпусе с 30 выводами (LCC30). Внутри корпуса находится металлизированный слой для заземления ЧЭ и ИС, а также, для уменьшения температурного градиента между ЧЭ и ИС. Габаритные размеры корпуса ММГ 11.5х19.56х2.6мм. Для уменьшения длины проводников между ИС и МЧЭ контактные площадки ЧЭ выполнены с одной стороны, ближней к ИС. Сборка представлена на рисунке 1.
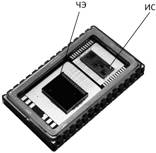
Рис. 1. Сборка ММГ.
Микромеханический чувствительный элемент
Подвижная масса микромеханического чувствительного элемента (МЧЭ) с элементами подвеса и гребенчатой электродной структуры показана на рисунке 2. Типовые значения добротности подвесов подвижной массы МЧЭ составляют более 105 по оси первичных колебаний и 104 по оси вторичных колебаний. Резонансная частота подвеса в канале первичных колебаний составляет 3,2 кГц, в канале вторичных колебаний выше на 5-6%.

Рис. 2. Упругий подвес подвижной массы МЧЭ.
Для формирования канала первичных колебаний используются электроды с гребенчатой структурой. Предельный угол поворота подвижной массы в этом ЧЭ ограничен стопорами на уровне 1,4-1,5°; амплитуда первичных колебаний устанавливается на уровне 1°.[4]
Специализированная интегральная схема
ИС изготавливается по 0,13 мкм КМОП технологии, она включает в себя преобразователи емкость–напряжение, схемы формирования напряжений, в том числе опорных, повышающих и обратной связи на силовых электродах, тактовый генератор, цифровой блок, включающий в себя синхронные детекторы, выполняющие функции демодуляторов. ИС обеспечивает работу ММГ в двух режимах: компенсационном режиме и режиме прямого преобразования.
Настройка ММГ выполняется в автоматическом режиме с помощью специализированной программы, выполненной в виде виртуального инструмента, который создан с использованием программы LabView.
Определение квадратурной помехи
Одной из причин появления этой помехи является неперпендикулярность направлений осей первичных и вторичных колебаний ротора, обусловленная погрешностями изготовления.
В идеальных ММГ вторичные колебания инерционной массы возникают только при появлении угловой скорости основания. Однако в действительности в экспериментальных ММГ на неподвижном основании присутствуют вторичные колебания, называемые квадратурной помехой.[3]
В исследуемом гироскопе квадратурная помеха подавляется за счет синхронного фазочувствительного детектора в ИС. Настройка синхронного детектора на максимальное подавление квадратурной помехи осуществляется путем изменения фазы опорного сигнала, которая может быть изменена с шагом 3,7° в диапазоне от 0 до 180°. Упрощенная схема определения квадратурного сигнала приведена на рисунке 3.
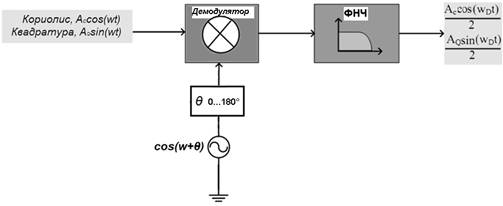
Рис. 3. Упрощенная схема выделения квадратурного сигнала.
Выходной сигнал СД может быть представлен в виде:
![]() (1)
(1)
где ![]() ,
, ![]() – напряжение, пропорциональное полезной составляющей и квадратурной помехе соответственно,
– напряжение, пропорциональное полезной составляющей и квадратурной помехе соответственно, ![]() – фазовый сдвиг, вносимый при формировании сигналов. Из этого выражения видно, что смещение и дрейф нуля ММГ в значительной степени определяются величиной квадратурной помехи. По изменению квадратурной помехи после корпусирования ЧЭ с заказной ИС можно судить о качестве выполнения этой операции.
– фазовый сдвиг, вносимый при формировании сигналов. Из этого выражения видно, что смещение и дрейф нуля ММГ в значительной степени определяются величиной квадратурной помехи. По изменению квадратурной помехи после корпусирования ЧЭ с заказной ИС можно судить о качестве выполнения этой операции.
Эта величина была определена путем измерения выходного сигнала ММГ на неподвижном основании при изменении фазы опорного сигнала в диапазоне 0-180°.
Определение квадратурного сигнала проводилось для 35 гироскопов. На рисунке 4 представлен график зависимости полученного квадратурного сигнала от фазы опорного сигнала. Разброс по величине от образца к образцу составил около 10 раз.
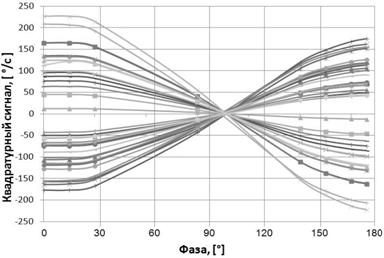
Рис. 4. Зависимость квадратурного сигнала от фазы опорного сигнала.
Значения уровня квадратурной помехи, полученные по разработанному методу, совпадают со значениями, полученными фирмой-изготовителем при измерении этой помехи при отбраковке ЧЭ на уровне пластины.
На рисунке 5 изображен график, показывающий, что между значениями квадратурного сигнала, полученными на уровне пластины и готового изделия, существуют определенная корреляция. Это может говорить о правильности сборки?
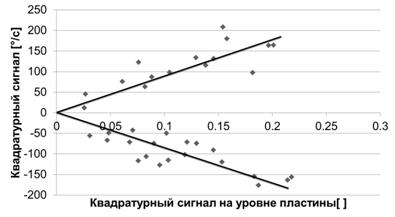
Рис. 5. Сопоставление результатов определения квадратурного сигнала на уровне изделия и пластины.
Определение зависимости амплитуды сигнала управления первичными колебаниями от температуры
При высокой повторяемости зависимости смещения нуля и масштабного коэффициента от температуры изменение выходного сигнала гироскопа может быть скомпенсировано сигналами датчика температуры, встроенного в ИС. В силу того, что в ИС выделяется мощность, температуры ЧЭ и датчика температуры оказываются различными. Разность этих температур существенно изменяется в переходных режимах, она так же зависит от условий работы ММГ.
В экспериментальных исследованиях [5,6,7] было установлено, что резонансные частоты подвеса и выходной сигнал схемы автоматического регулирования (АРУ) UАРУ зависят от температуры.
Возможность использования температурной зависимости резонансной частоты подвеса для термокомпенсации ММГ, в котором канал драйва содержал систему стабилизации амплитуду первичных колебаний, построенную с использованием системы фазовой автоподстройки частоты и схемы автоматического регулирования усиления, а канал вторичных колебаний был сформирован по разомкнутой схеме, была показана в работе [8].
Описанная схема канала драйва является типичной для современных ММГ среднего класса точности, она приведена на рисунке 6.
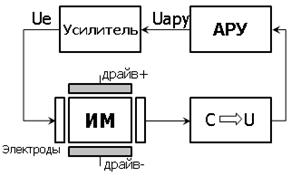
Рис.6. Блок-схема канала драйва
В работе [8] приведены данные для диапазона температур +35...+55°С. Компенсация за счет сигналов, вырабатываемых в самом ММГ авторами названа самокомпенсацией (self - compensation).
В данной работе рассматривается возможность достижения самокомпенсации за счет использования температурной зависимости добротности Q резонансного подвеса инерционной массы по оси первичных колебаний.
Эта зависимость Q от температуры (Т) может носить различный характер.
В случае, если она определяется остаточными газами в вакуумированной полости ЧЭ, Q пропорциональна T-1/2, а если она определяется термоэластичными потерями, то Q пропорциональна T-3. Для диапазона температур -40…+85°С, отношение максимального значения Q к минимальному в первом случае будет равно 1.23, а во втором 3.58.
Изменение Q в системе стабилизации первичных колебаний приводит к изменению напряжения управления, поступающего на электроды гребенчатого двигателя (UГР) и выходного сигнала схемы АРУ (UАРУ). Эти изменения при достаточно большом контурном усилении в системе стабилизации оказываются пропорциональными величине Q-1. Можно ожидать, что зависимости этих напряжений от температуры будут иметь монотонный характер.
Эксперименты, описанные в [5] показали, что на участке +20…+60°С эта зависимость отличалась от монотонной, однако в работе [6] для всего приведенного участка +35…+65°С была близка к линейной.
На рисунке 7 показан график экспериментально полученной зависимости UГР(ТД) для диапазона температур окружающей среды -40…+85.
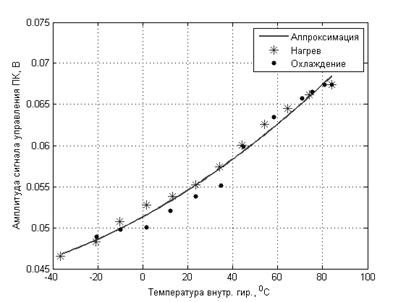
Рис.7. Зависимость амплитуды сигнала управления первичными колебаниями от температуры, определяемой внутренним датчиком
Заключение
Значения уровня квадратурной помехи, полученные по разработанному методу, совпадают со значениями, полученными фирмой-изготовителем при измерении этой помехи при отбраковке ЧЭ на уровне пластины. В дальнейших исследованиях планируется разработка критериев отбраковки гироскопов и их классификации на ранних этапах изготовления, что особо актуально, учитывая длительность процессов испытаний и калибровки.
Для оценки составляющих ошибки смещения нуля и масштабного коэффициента планируются эксперименты с партией ММГ, предварительно отобранных по величине неповторяемости зависимости нулевого сигнала от температуры, и самокомпенсация в реальном времени с использованием выходного сигнала цифровой схемы АРУ.
Для составления моделей погрешностей самокомпенсации предполагается проведение теоретических и экспериментальных исследований, которые могут привести к повышению статической и динамической точности компенсации.
Литература
1. Беляев, Я. В. Использование квадратурной составляющей выходного сигнала для тестирования ММГ. – Гироскопия и навигация, 2011. - №1с.
2. Беляев, Я. В. Методы снижения порога чувствительности микромеханического гироскопа. – Дисс. на соиск. уч. ст. к. т. н., ЦНИИ “Электроприбор”, С-Пб. – 2010.
3. Беляева, Т. А. Методы компенсации квадратурной помехи в микромеханическом гироскопе RR-типа. – Дисс. на соиск. уч. ст. к. т. н., ЦНИИ “Электроприбор”, С-Пб. – 2009.
4. Пешехонов, В. Г. Результаты испытаний установочной партии микромеханических гироскопов RR-типа // [и др.]. – Гироскопия и навигация, 2011. - №1с.
5. Shcheglov, K., Temperature dependent characteristics of the JPL silicon MEMS gyroscope // Shcheglov [и др.] – Aerospace Conference Proceedings, 2000 IEEE, Volume: 11, 18-25 March 2000 Pages: vol.1.
6. Ferguson, M. I. Effect of temperature on MEMS vibratory rate gyroscope // Ferguson M. I. [и др.] – IEEE Aerospace Conference, – Big Sky, Montana, 2005. - PP. 1-6.
7. Dunzhu, X. Microgyroscope temperature effects and compensation-control methods // Dunzhu X. [и др.]. – Sensors 2009, Vol. 9 Issue 10. - PP. .
8. Prikhodko, I. P., Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing // I. P. Prikhodko, A. A. Trusov, A. M. Shkel. – Sensors & Actuators: A. Physical (2012).
Текст доклада согласован с научным руководителем.
к. т.н., начальник сектора
[*] Научный руководитель к. т.н., начальник сектора,
