

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 656.71 На правах рукописи
ЯМАНОВ АНТОН ДМИТРИЕВИЧ
РАСШИРЕНИЕ ДИАПАЗОНА ПРИМЕНЕНИЯ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОБЗОРА ЛЕТНОГО ПОЛЯ
С УЧЕТОМ МЕТЕОУСЛОВИЙ
05.22.14 – Эксплуатация воздушного транспорта
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Москва – 2010 г.
Работа выполнена на кафедре «Технической эксплуатации радиоэлектронных систем воздушного транспорта» Федерального государственного образовательного учреждения высшего профессионального образования Московского государственного технического университета гражданской авиации.
Научный руководитель: | Заслуженный деятель науки и техники РФ, профессор, доктор физико-математических наук
|
Официальные оппоненты: | профессор, доктор технических наук
доцент, кандидат технических наук
|
Ведущая организация: | ГосНИИ ГА |
Защита диссертации состоится « 22 » апреля 2010г. на заседании диссертационного совета Д 223.011.01 при Московском государственном техническом университете гражданской авиации (МГТУ ГА) по адресу: ГСП-3, Москва, А-493, Кронштадтский бульвар, 20.
С диссертацией можно ознакомиться в библиотеке МГТУ ГА
Автореферат разослан « » 2010г.
Учёный секретарь диссертационного совета Д 223.011.01:
профессор, доктор технических наук
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. Уровень технического совершенства радиотехнических систем (РТС) управления воздушным движением (УВД) и управления наземным движением (УНД), их эффективность, а значит и высокая результативность использования воздушного транспорта во многом определяется возможностями и эксплуатационными характеристиками РТС, использующихся для информационного обеспечения систем управления наземным и воздушным движением.
В настоящее время в радиотехнической системе УНД основным средством обеспечения безопасности движения наземных транспортных средств в зоне аэродрома является радиолокатор обзора летного поля (РЛС ОЛП). В условиях плохой видимости, вызванной наличием метеообразований в виде тумана, дождя, снега, эффективность работы РЛС заметно падает, уменьшается дальность действия, на экране появляется большое количество посторонних засветок от метеообразований. Это происходит вследствие рассеяния на капельках жидкости, кусочках льда, снежинках и поглощения энергии гидрометеорными частицами.
Наличие переотражений от подстилающей поверхности и метеообразований накладывают ограничения на интенсивность движения транспортных средств в районе аэродрома, а, следовательно, и на интенсивность полетов воздушных судов.
В этой связи представляет интерес поиск новых методов повышения различимости полезного сигнала на фоне мешающих отражений в сложных метеоусловиях для расширение диапазона применения РЛС ОЛП. Достаточно перспективными в этом направлении являются методы радиополяриметрии.
Эффективность применения этих методов для селекции наземных целей определяется в основном различиями в поляризационных характеристиках (ПХ) целей, местных предметов (МП), подстилающей поверхности (ПП) и метеообразований. Однако потенциальные возможности поляризационных эффектов для улучшения обнаружения и различения радиолокационных целей не используются в РЛС ОЛП в полной мере.
Одной из основных причин этого является отсутствие достаточно достоверных априорных знаний о статистических характеристиках как объектов наблюдения, так и подстилающих покровов и метеообразований.
Обеспечение работоспособности в неблагоприятных погодных условиях, равно как и отображение устойчивой достоверной обстановки в зоне аэропорта на экране РЛС ОЛП, является одной из важнейших задач, стоящих перед разработчиком и эксплуатирующими подразделениями ГА. На оснащение предприятий гражданской авиации поступают РЛС ОЛП, являющиеся источниками информации для автоматизированных систем управления воздушным движением (АС УВД), которые работают в диапазоне 0,8…1,5 см (ФАП-2000), где влияние подстилающей поверхности и гидрометеорных образований играет существенную роль. Именно поэтому, диссертационная работа, посвященная расширению диапазона применения РЛС ОЛП – улучшению обнаружения объектов наблюдения на фоне естественных и искусственных покровов, характерных для зоны аэропорта, в сложных метеоусловиях – представляют собой актуальную задачу.
 Целью работы является расширение диапазона применения РЛС ОЛП при селекции малоподвижных и неподвижных наземных объектов на фоне естественных и искусственных покровов, характерных для зоны аэропорта, а также в условиях сложной метеообстановки.
Целью работы является расширение диапазона применения РЛС ОЛП при селекции малоподвижных и неподвижных наземных объектов на фоне естественных и искусственных покровов, характерных для зоны аэропорта, а также в условиях сложной метеообстановки.
Поставленная цель достигается путем решения следующих основных задач:
1. Анализ влияния мешающих отражений и метеообразований на эксплуатационные возможности РЛС ОЛП.
2. Анализ отражательных характеристик естественных и искусственных покровов на территории аэропортов и объектов наблюдения РЛС ОЛП и выявление различий в поляризационной структуре отраженных от подстилающих покровов и объектов наблюдения сигналов.
3. Анализ отражательных характеристик метеообразований, влияющих на функционирование РЛС ОЛП, и сигналов, отраженных от объектов наблюдения РЛС ОЛП в сложной метеообстановке.
4. Разработка рекомендаций по расширению диапазона применения РЛС ОЛП путем использования методов радиополяриметрии.
Научная новизна работы состоит в том, что в ней:
1. Определены статистические характеристики элементов матрицы рассеяния естественных и искусственных покровов, характерных для зоны аэропорта, а также объектов наблюдения в миллиметровом диапазоне волн, подтвержденные экспериментальными данными.
2. Определены статистические характеристики элементов матрицы рассеяния метеообразований, а также объектов наблюдения в сложных метеоусловиях в миллиметровом диапазоне волн, подтвержденные экспериментальными данными.
3. На основе экспериментальных данных определено влияние вида поляризации на дальность действия РЛС ОЛП при их эксплуатации в сложных метеоусловиях.
4. Разработаны рекомендации по расширению диапазона применения РЛС ОЛП методами радиополяриметрии.
Практическая значимость работы состоит в том, что ее результаты позволяют:
1. Повысить вероятность правильного обнаружения малоподвижных и неподвижных наземных объектов при наличии мешающих отражений от подстилающей поверхности и метеообразований.
2. Повысить контраст наблюдаемых малоподвижных и неподвижных объектов в зоне аэропорта на индикаторе РЛС ОЛП, и тем самым обеспечить работоспособность РЛС ОЛП в неблагоприятных погодных условиях.
3. Повысить уровень безопасности полетов (взлет, посадка) и предупреждения столкновения на земле.
4. Повысить интенсивность движения транспортных средств в районе аэродрома, а, следовательно, и интенсивность полетов воздушных судов.
На защиту выносится обоснование расширения диапазона применения радиолокационных станций обзора летного поля с учетом метеоусловий методами радиополяриметрии.
Внедрение результатов работы. Результаты работы внедрены в МКБ «Компас», а также в учебный процесс Московского государственного технического университета гражданской авиации, что подтверждается соответствующими актами о внедрении.
Апробация работы. Основные положения диссертации докладывались на международных НТК "Гражданская авиация на современном этапе науки, техники и общества", (Москва, 2007г., 2009г.), на международных НТК «Авиация и космонавтика» (Москва, гг.) в Московском авиационном институте, на международных НТК «Гагаринские чтения» (Москва, гг.) в Московском авиационном технологическом институте, на НТК "Радиолокация, навигация, связь" (RLNC*2009) (Воронеж, 2009 г.) в Воронежском государственном университете, на международной НТК «Signal Processing Symposium SPS-2009» (Варшава, 2009 г.), на межкафедральных семинарах ( гг.) в Московском государственном техническом университете гражданской авиации и т. д.
Публикации. По материалам диссертации опубликовано 8 работ (все в изданиях, определенных ВАК РФ для публикации материалов диссертаций). По тематике диссертации в рамках договора по гранту выполнена НИР.
Структура и объем диссертационной работы. Работа состоит из введения, четырех разделов, заключения и списка используемой литературы. Общий объем диссертации составляет 220 страниц, включает 106 рисунков, 27 таблиц, список используемой литературы содержит 162 наименования.
СОДЕРЖАНИЕ РАБОТЫ
Первый раздел диссертации посвящен анализу влияния мешающих отражений и метеообразований на эксплуатационные возможности радиолокационных станций обзора летного поля (РЛС ОЛП).
Радиолокационная станция характеризуется разнообразными техническими и эксплуатационными параметрами, определяющими ее свойства и возможности. К основным характеристикам РЛС относятся: зона обзора, дальность и азимут, точность и разрешающая способность, помехозащищенность, скорость получения информации и эксплуатационные показатели.
Особенность РЛС ОЛП состоит в том, что в них обеспечивается высокая разрешающая способность, позволяющая повысить точность определения местоположения целей для более детализированного воспроизведения зоны аэродрома. Это необходимо для того, чтобы получаемая информация дополняла, а в условиях плохой видимости и заменяла визуальное наблюдение с диспетчерского пункта, позволяя эффективно управлять движением самолетов и транспортных средств (при условии их оборудования средствами связи). Причем, чем больше частота зондирующего сигнала радиолокационной станции, тем выше разрешающая способность РЛС. Однако переход к более высоким частотам приводит к возникновению дополнительных помех при приеме слабых радиолокационных сигналов, возникающих при рассеянии радиоволн естественными и искусственными покровами и метеообразованиями.
На современном этапе развития РЛС ОЛП основной задачей является повышение качества радиолокационной информации. Наличие мешающих отражений от земной поверхности, местных предметов и метеообразований, которые могут иметь большую эффективную поверхность рассеяния (ЭПР), приводит к уменьшению различимости отметок воздушных судов. Засветы экранов, вызываемые отражениями от подстилающих покровов и, что особенно актуально в миллиметровом диапазоне, от гидрометеоров, приводят в некоторых случаях к полной потере координатной отметки (или перепутыванию ее с отдельными остатками метеообразований, тепловых выбросов промышленных предприятий или местных предметов, имеющими размеры аналогичные размерам координатной отметки).
Для улучшения различимости (или контрастности) отметок на фоне отражений в настоящее время находят применение такие устройства как: селекторы сигналов по длительности, блоки временной регулировки усиления, системы индикации воздушных целей (ИВЦ) и селекции движущихся целей (СДЦ), устройства управляемой поляризации и др.
В последние годы все большее внимание уделяется разработчиками радиолокационной техники устройствам управляемой поляризации, обладающим дополнительными возможностями для уменьшения вредного влияния метеообразований и подстилающих покровов на работу РЛС ОЛП. В РЛС ОЛП «Алмаз», «Оредеж», ASDE-3, ASTRE-2000, TERMA, «Атлантика» применяются устройства, создающие наиболее распространенные виды поляризации – “круг” (в РЛС «Аксай» – “линия”).
Опытная эксплуатация РЛС ОЛП миллиметрового диапазона «Обзор-2» показала, что при дожде с ветром, сильном дожде, обильном снегопаде эффективность работы при круговой поляризации уменьшается, на индикаторе остается большое количество засветок. Например, для обеспечения вероятности правильного обнаружения ![]() , по сравнению со случаем ясного дня, ЭПР цели должна быть в 2 раза больше. В случае наблюдения цели сквозь листву деревьев протяженностью 5 м, сигнал от цели с учетом затухания в листве должен быть не менее, чем в 10…16 раз больше сигнала, отраженного от листвы, для достижения вероятности правильного обнаружения, по крайней мере, уровня 0,9. При работе на линейной поляризации, по мере увеличения водности при одном и том же соотношении сигнал/фон вероятность правильного обнаружения также заметно падает. Названное отношение должно быть увеличено, по крайней мере в 3…4 раза в условиях сильного дождя, чтобы обеспечить достаточное значение
, по сравнению со случаем ясного дня, ЭПР цели должна быть в 2 раза больше. В случае наблюдения цели сквозь листву деревьев протяженностью 5 м, сигнал от цели с учетом затухания в листве должен быть не менее, чем в 10…16 раз больше сигнала, отраженного от листвы, для достижения вероятности правильного обнаружения, по крайней мере, уровня 0,9. При работе на линейной поляризации, по мере увеличения водности при одном и том же соотношении сигнал/фон вероятность правильного обнаружения также заметно падает. Названное отношение должно быть увеличено, по крайней мере в 3…4 раза в условиях сильного дождя, чтобы обеспечить достаточное значение ![]() .
.
Применяемые устройства управляемой поляризации также ослабляют отражения от земных покровов, но из-за шероховатости поверхности и несовершенства РЛС эффективность подавления снижается. Так, на рис. 1 числами показаны отметки на индикаторе РЛС ОЛП, соответствующие объектам радиолокационного наблюдения в окружении засветок, вызванных отражениями от подстилающей поверхности и местных предметов.
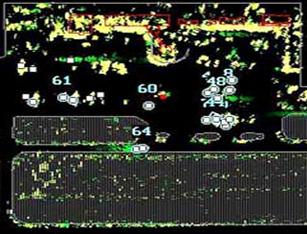
а | б |
Рис. 1. Радиолокационные изображения зоны аэродрома на экранах РЛС ОЛП «Атлантика» (а) и ASTRE (б)
Для более полного применения возможностей поляризационных эффектов, которые могли бы использоваться при эксплуатации РЛС ОЛП, необходимо провести анализ поляризационных свойств окружающих РЛС естественных и искусственных покровов зоны аэропорта, метеообразований. Эта информация даст возможность усовершенствовать (или создать новую) аппаратуру, использующую поляризационные эффекты, которая обеспечит более высокие коэффициенты подавления мешающих отражений и расширит диапазон применения перспективных РЛС.
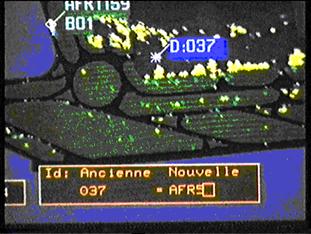
Многочисленные экспериментальные исследования подтверждают эффективность применения радиополяриметрии для решения задач обнаружения, селекции и распознавания объектов радиолокационного наблюдения и демонстрируют возможность реализации методов радиополяриметрии в существующих и перспективных радиолокационных комплексах. Так, на рис. 2 приведен фрагмент радиолокационного изображения местности вблизи аэропорта, совмещенный с картой. На рис. 3 представлен фрагмент того же радиолокационного изображения местности, полученного на оптимальной по критерию максимизации контраста поляризации (путем управления поляризацией РЛС на индикаторе стали видны многие объекты, которые не отображались на рис. 2). Вероятность правильного распознавания идентифицированных объектов на фоне местных предметов и подстилающей поверхности по поляризационным признакам находилась в пределах 0,93…0,97, вероятность пропуска малоразмерных объектов не превышала значения 0,02.
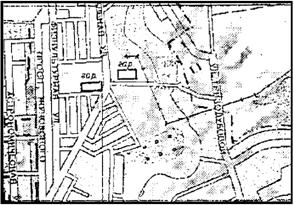
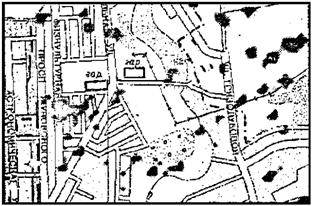
Рис. 2. Фрагмент радиолокационного изображения местности вблизи аэропорта, совмещенный с картой местности | Рис. 3. Результат распознавания металлических вертикально-ориентированных объектов на оптимальной по критерию максимизации контраста поляризации |
Во втором разделе диссертации проведен анализ отражательных характеристик естественных и искусственных покровов и объектов наблюдения РЛС ОЛП, рассмотрены особенности рассеяния электромагнитных волн (ЭМВ) естественными и искусственными покровами, а также статистические характеристики поляризационных параметров естественных и искусственных покровов и объектов наблюдения РЛС ОЛП в миллиметровом диапазоне волн.
Многообразие подстилающих покровов и значительный разброс характеристик отражения от них и от местных предметов приводит к необходимости создания для этих объектов некоторого математического аппарата, дающего возможность описать это многообразие на одном языке и обеспечивающего глубину и гибкость соответствующих вычислений. Наиболее подходящим аппаратом для этой цели является аппарат, использующий в качестве основы матрицу рассеяния (МР) отдельного элемента отражения. Матрица рассеяния может быть представлена в виде
 ,
,  , (1)
, (1)
где  и
и ![]() – модули, а
– модули, а ![]() и
и ![]() – аргументы элементов матрицы рассеяния.
– аргументы элементов матрицы рассеяния.
Поскольку все элементы этой матрицы рассеяния являются функциями времени и координат, наиболее полной характеристикой в этом случае является шестимерный закон распределения элементов МР.
Теория поляризации и поляризационный анализ дают возможность вводить некоторые другие характеристики: ![]() – эффективную поверхность рассеяния,
– эффективную поверхность рассеяния, ![]() – степень поляризационной анизотропии,
– степень поляризационной анизотропии, ![]() – координаты так называемого собственного поляризационного базиса, которые определяются уже четырехмерным законом распределения этих величин.
– координаты так называемого собственного поляризационного базиса, которые определяются уже четырехмерным законом распределения этих величин.
Проведенный анализ поляризационных характеристик естественных и искусственных покровов, характерных для зоны аэропорта и близлежащей местности (гладких поверхностей, снега, льда, лесных массивов, а также травяных покровов и посевов сельскохозяйственных культур) в миллиметровом диапазоне волн подтвердил зависимость эффективной площади рассеяния ![]() от угла наблюдения
от угла наблюдения ![]() , времени наблюдения, типа подстилающего покрова, частоты сигнала и типа поляризации, и позволил сделать следующие выводы:
, времени наблюдения, типа подстилающего покрова, частоты сигнала и типа поляризации, и позволил сделать следующие выводы:
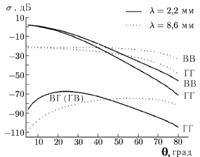
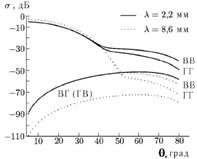
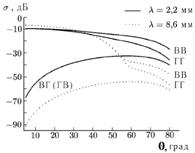
1. ЭПР на всех типах поляризации уменьшается с увеличением угла ![]() (рис. 4) [1].
(рис. 4) [1].
а | б | в |
Рис. 4. Зависимости ЭПР от угла наблюдения, полученные на ВВ, ГГ и ВГ(ГВ) поляризациях при зондировании бетонной поверхности (а), асфальта (б) и песка (в) для частот 136 ГГц и 34 ГГц (![]() мм и
мм и ![]() мм)
мм)
2. Изменения ![]() с течением времени сугубо индивидуальны для каждого типа подстилающей поверхности и определяются либо изменением температуры и уровня содержания жидкой фазы вследствие смены времени суток и года (для снега и льда, рис. 5), либо сезонными изменениями уровня лиственного покрова (для растительных покровов, рис. 6, 7). Для гладких поверхностей изменение величины ЭПР с течением времени не характерно.
с течением времени сугубо индивидуальны для каждого типа подстилающей поверхности и определяются либо изменением температуры и уровня содержания жидкой фазы вследствие смены времени суток и года (для снега и льда, рис. 5), либо сезонными изменениями уровня лиственного покрова (для растительных покровов, рис. 6, 7). Для гладких поверхностей изменение величины ЭПР с течением времени не характерно.
3. При зондировании подстилающих поверхностей в миллиметровом диапазоне волн значения ЭПР на вертикальной ![]() и горизонтальной
и горизонтальной ![]() поляризациях практически равны и заметно больше значений ЭПР для кроссовой составляющей.
поляризациях практически равны и заметно больше значений ЭПР для кроссовой составляющей.
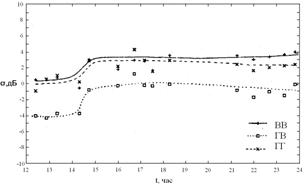
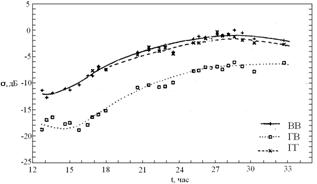 Рис. 5. Зависимости ЭПР от времени наблюдения (часы), полученные на ВВ, ГГ и ГВ поляризациях при зондировании снежного покрова на частоте 140 ГГц (а) и 35 ГГц (б) под углом
Рис. 5. Зависимости ЭПР от времени наблюдения (часы), полученные на ВВ, ГГ и ГВ поляризациях при зондировании снежного покрова на частоте 140 ГГц (а) и 35 ГГц (б) под углом 
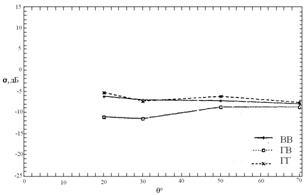
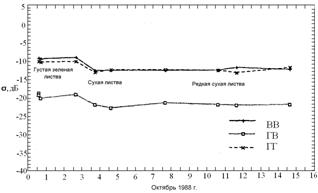
Рис. 6. Зависимости ЭПР от угла наблюдения, полученные на ВВ, ГГ и ГВ поляризациях при зондировании лесного массива на частоте 140 ГГц | Рис. 7. Зависимости ЭПР от времени наблюдения (дни), полученные на ВВ, ГГ и ГВ поляризациях при зондировании лесного массива на частоте 35 ГГц, |
4. При увеличении частоты зондирующего сигнала характерно уменьшение степени поляризации (разности ГГ(ВВ) и ГВ компонент) и увеличение уровня отраженного от подстилающей поверхности сигнала.
5. Независимо от величин ЭПР подстилающих поверхностей в миллиметровом диапазоне волн, вследствие практически идентичного уровня значений ![]() на горизонтальной и вертикальной поляризациях, для координат собственного поляризационного базиса
на горизонтальной и вертикальной поляризациях, для координат собственного поляризационного базиса ![]() рассмотренных покровов характерна, во-первых, высокая устойчивость, а, во-вторых, низкое среднеквадратическое отклонение (СКО). Значения углов
рассмотренных покровов характерна, во-первых, высокая устойчивость, а, во-вторых, низкое среднеквадратическое отклонение (СКО). Значения углов ![]() и
и ![]() будут стабильны практически при любых углах обзора.
будут стабильны практически при любых углах обзора.
6. Подстилающие поверхности при зондировании в миллиметровом диапазоне волн являются в общем случае поляризационно изотропной средой.
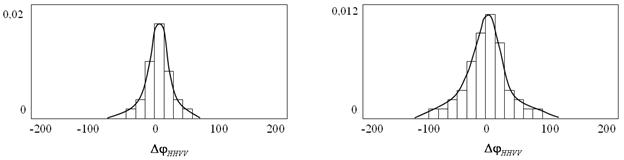
Как показывает анализ экспериментальных исследований фазовых характеристик сигналов отраженных от подстилающих покровов в миллиметровом диапазоне волн, распределение разности фаз ортогональных компонент отраженного сигнала ![]() для подстилающей поверхности является Гауссовским с нулевым средним значением (рис. 8). С другой стороны, разность фаз линейной и кроссовой компоненты
для подстилающей поверхности является Гауссовским с нулевым средним значением (рис. 8). С другой стороны, разность фаз линейной и кроссовой компоненты  сигнала, отраженного от неровной поляризационно-изотропной подстилающей поверхности, имеет равномерное распределение на интервале
сигнала, отраженного от неровной поляризационно-изотропной подстилающей поверхности, имеет равномерное распределение на интервале ![]() , и не зависит от характеристик поверхности и условий измерения.
, и не зависит от характеристик поверхности и условий измерения.
а | б |
Рис. 8. Плотности распределения вероятности ![]() для гладких (а) и шероховатых поверхностей (б) при угле обзора
для гладких (а) и шероховатых поверхностей (б) при угле обзора ![]()
Увеличение радиолокационного контраста ![]() , где
, где ![]() – ЭПР цели, а
– ЭПР цели, а ![]() – ЭПР разрешаемой площади участка земной поверхности с целью (которая зависит от удельной ЭПР помеховых отражений
– ЭПР разрешаемой площади участка земной поверхности с целью (которая зависит от удельной ЭПР помеховых отражений ![]() и величины площадки
и величины площадки ![]() ), определяется тем, что цель включает в свой состав совокупность граней, уголков, обладающих ярко выраженными деполяризующими свойствами, а для подстилающей поверхности эти отражения отсутствуют.
), определяется тем, что цель включает в свой состав совокупность граней, уголков, обладающих ярко выраженными деполяризующими свойствами, а для подстилающей поверхности эти отражения отсутствуют.
Таким образом, цель более «чувствительна» к поляризации падающего электромагнитного поля и ведет себя как преобразователь поляризации, а земная поверхность практически не изменяет поляризационную структуру поля вследствие поляризационно-изотропного характера отражения от земной поверхности.
При изменении местоположения излучателя относительно объекта наблюдения происходит изменение уровня отраженного радиолокационной цели сигнала вследствие изменения количества и вида деполяризующих отражателей, в то время как изменение поляризации на излучение приводит только к изменению интенсивности локальных отражателей в контуре цели (на участке подстилающей поверхности). На рис. 9 представлена зависимость параметра ![]() от ракурса объекта наблюдения, где
от ракурса объекта наблюдения, где ![]() – максимальная интенсивность отраженного сигнала,
– максимальная интенсивность отраженного сигнала, ![]() – интенсивность отраженного сигнала при вертикальной поляризации на излучение и прием. Из рисунка видно, что для 73% ракурсов за счет изменения поляризационных характеристик приемно-передающего тракта можно добиться повышения интенсивности сигнала в точке приема.
– интенсивность отраженного сигнала при вертикальной поляризации на излучение и прием. Из рисунка видно, что для 73% ракурсов за счет изменения поляризационных характеристик приемно-передающего тракта можно добиться повышения интенсивности сигнала в точке приема.
Цели обладают ярко выраженной асимметрией, и уровень отраженных от них сигналов существенно зависит как от ракурса, так и от поляризации облучающей волны. Для подстилающей поверхности эти закономерности менее ярко выражены, что экспериментально подтверждает возможность селекции целей на фоне подстилающей поверхности по поляризационным признакам.
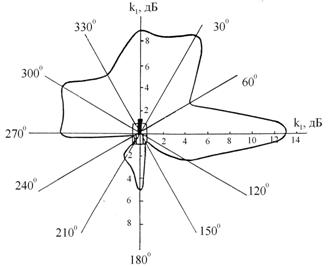
Рис. 9. Зависимость параметра k1 от ракурса объекта
Для радиолокационных целей средние значения разности фаз ортогонально поляризованных компонент рассеянного сигнала ![]() далеки от нулевых, а значения разности фаз
далеки от нулевых, а значения разности фаз ![]() не распределены равномерно, а имеют некоторое ненулевое среднее значение при небольшом среднеквадратическом отклонении (10…20°). Отличия параметров
не распределены равномерно, а имеют некоторое ненулевое среднее значение при небольшом среднеквадратическом отклонении (10…20°). Отличия параметров ![]() и для подстилающей поверхности и радиолокационных целей позволяет производить идентификацию целей на фоне подстилающих покровов по данным признакам.
и для подстилающей поверхности и радиолокационных целей позволяет производить идентификацию целей на фоне подстилающих покровов по данным признакам.
Экспериментальные исследования позволили установить, что сигнал, отраженный от участков суши, покрытых растительностью, в значительной степени деполяризован, и отраженные сигналы ортогональных поляризаций слабо коррелированны. Поэтому значение взаимно корреляционной функции принятых на ортогональных поляризациях сигналов невелико. Максимальные значения коэффициентов взаимной корреляции не превышают 0,2.
При наличии движущийся цели в пространственном элементе разрешения принятые сигналы ортогональной и согласованной поляризаций формируются отражениями как от местности, так и от движущийся цели. Цель также в значительной степени деполяризует излучаемый сигнал, поэтому интенсивности рассеянных сигналов на ортогональной и согласованной поляризациях соизмеримы. Однако, как показали экспериментальные исследования, в отличие от отражений от местности, амплитуды и фазы отраженных от целей на ортогональных поляризациях сигналов сильно коррелированны, что может использоваться при построении систем селекции объектов на фоне местности.
В табл. 1 приведены поляризационные характеристики, которые можно эффективно использовать для уменьшения влияния мешающих отражений от естественных и искусственных покровов в зоне аэродрома, а также для улучшения обнаружения объектов наблюдения РЛС ОЛП.
Табл. 1. Влияние использования поляризационных характеристик на изменение радиолокационного контраста
Поляризационные характеристики | Проявление влияния на радиолокационный контраст малоразмерных объектов на фоне подстилающей поверхности |
Координаты собственного поляризационного базиса подстилающих покровов | Подавление мешающих отражений. |
Разность фаз ортогональных компонент отраженного сигнала | Уменьшение влияния мешающих отражений от естественных и искусственных покровов в зоне аэродрома. |
Разность фаз линейной и кроссовой компоненты отраженного сигнала | |
Степень поляризационной анизотропии | |
Комплексные поляризационные признаки селекции объектов наблюдения | Повышение контраста малоразмерных объектов на фоне подстилающей поверхности. |
Взаимно корреляционная функция ортогонально поляризованных компонент сигналов. | Повышение контраста наблюдения малоразмерных объектов на фоне отражений от местности, покрытой растительностью на 4-10 дБ. |
В третьем разделе диссертации рассмотрены особенности рассеяния ЭМВ метеообразованиями, а также поляризационные характеристики метеообразований. Приводится анализ данных, полученных в результате эксперимента по снятию в условиях эксплуатации статистических характеристик отраженных сигналов от радиолокационной цели и метеообразований в различные времена года, при различной погоде, на различных поляризациях. Экспериментально получены зависимости дальности действия РЛС ОЛП от метеоусловий при работе на различных видах поляризации в миллиметровом диапазоне волн
Физически ослабление электромагнитных волн миллиметрового диапазона связано с двумя причинами – с поглощением энергии и с ее рассеянием. Величина ослабления значительно колеблется в зависимости от размеров гидрометеоров, их формы, которые, в свою очередь, зависят от многих факторов – интенсивности дождя или снега, силы ветра, местных орографических и метеорологических условий.
Рассеяние и ослабление при затухании радиоволн на гидрометеорах при теоретическом описании характеризуются поперечным сечением рассеяния и коэффициентом поглощения. Подобные упрощения приводят к неточности оценки интенсивности дождей; приближенные допущения о сферичности не позволяют достаточно эффективно решить задачу устранения мешающего воздействия дождя на работу РЛС ОЛП. Еще большие трудности возникают при расчете ослабления при снегопаде, поскольку форма снежинок и снежных хлопьев отличается от сферической и может сильно изменяться даже в одном и том же снегопаде.
Представляется проблематичной возможность получения численного значения параметров различных моделей метеообразований в миллиметровом диапазоне только на основании чисто теоретических рассуждений о взаимодействии ЭМВ с ними и без использования натурных измерений реальных метеообразований. Напротив, более целесообразно выбирать ту или иную модель на основании измерений, проведенных в реальных условиях эксплуатации РЛС. Только на основании значения реальных статистических характеристик дождя, тумана, снега можно провести достаточно достоверную оценку возможных выигрышей.
Экспериментальные данные дают следующие значения для затухания радиоволн миллиметрового диапазона: в тумане не более 0,9 дБ/км, при слабом дожде порядка 2,8…3,0 дБ/км, в сильном дожде до 10 дБ/км, при снегопаде – 2…4 дБ/км.
При наблюдении цели в сложных метеоусловиях отраженный сигнал уменьшается в тумане на 15…20%, в слабом дожде на 30…38%, в сильном дожде – 35…42%, в снегопаде – до 50%.
Экспериментально полученные статистические характеристики отраженных сигналов при отсутствии и наличии целей, наблюдаемых в сложных метеоусловиях, выявляют два класса задач обнаружения целей. Первый из них относится к ситуации, когда сигнал, отраженный от метеообразований, мал, а их влияние сводится к уменьшению дальности обнаружения целей вследствие возрастания затухания сигнала. Это типично для несильных туманов и слабого снегопада. В этих случаях речь идет по существу об обнаружении цели с уменьшившейся ЭПР на фоне собственных шумов приемника. Второй класс задач возникает тогда, когда сигнал, отраженные от метеообразований, велик и существенно превышает уровень собственных шумов приемника, что типично для дождливой погоды, сильного снегопада и т. п. С позиции диспетчера, перед которым имеется экран с мощными засветками, требуется узнать факт наличия или отсутствия отметок цели.
Круговая поляризация оказывается эффективным средством для подавления мешающих отражений от гидрометеоров только в условиях тумана и слабого дождя (не более 8…10 мм/час). Кривые на рис. 10 соответствуют обнаружению в условиях снега и слабого дождя при различных вероятностях ложной тревоги (10-4 и 10-6). Из рисунка видно, что при больших сигналах обнаружение в условиях слабого дождя несколько лучше, чем в снеге, что является подтверждением известного из практики эксплуатации факта. Пунктиром приведена кривая, соответствующая обнаружению в условиях ясного дня. Крайне правая кривая относится к наблюдению цели сквозь сильный дождь. Из рисунка достаточно наглядно видно, как уменьшается эффективность подавления сигналов, отраженных от дождя, путем использования круговой поляризации. Например, для обеспечения  по сравнению со случаем ясного дня ЭПР цели должна быть увеличена более, чем в 2 раза.
по сравнению со случаем ясного дня ЭПР цели должна быть увеличена более, чем в 2 раза.
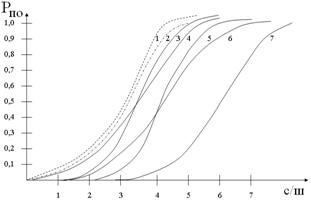
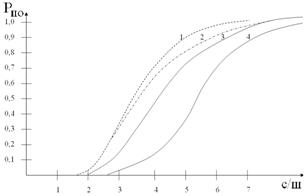
Рис. 10. Характеристики обнаружения на круговой поляризации в сложных метеоусловиях (1 – ясный день, 2 – туман (n=4), 3 – снег (n=4), 4 – слабый дождь, 5 – снег, 6 – слабый дождь (n=6), 7 – сильный дождь (n=6)) | Рис. 11. Характеристики обнаружения в сложных метеоусловиях при приеме на кроссовой составляющей ( 1 – слабый дождь (n=4), 2 – сильный дождь (n=4), 3 – дерево, снег (n=4), 4 – дерево (n=6)) |
Прием на кроссовую поляризацию может оказываться более эффективным, чем прием на КП в условиях сильного дождя (рис. 11). Однако ЭПР на кроссовой поляризации для реальных целей оказывается, как правило, на порядок ниже, чем ЭПР на КП, поэтому об эффективности использования такого режима в большинстве случаев нельзя говорить с определенностью. Тем не менее, кроссовый прием все же может оказаться более целесообразным при наблюдении целей, расположенных достаточно близко от РЛС. Обращает на себя внимание относительно слабая зависимость характеристик обнаружения от видов метеообразований. Сказанное позволяет вынести рекомендацию об использовании кроссового приема при наблюдении целей в районе аэропорта при перемежающихся осадках.
С точки зрения подавления сигналов от метеообразований использование режимов ГП-ГП и ВП-ВП практически эквивалентно. При одном и том же отношении сигнал/фон вероятность правильного обнаружения цели резко падает по мере увеличения водности, что объясняет наличие известного из опыта эксплуатации факта о наличии порогового уровня интенсивности дождя, при котором работа в названных режимах невозможна.
В табл. 2 и на рис. 12 показано, как уменьшается дальность наблюдения РЛС ОЛП в зависимости от метеоусловий при той же вероятности правильного обнаружения и виде поляризации. Заданная дальность действия 20 км (зона аэропорта) обеспечивается при вероятности правильного обнаружения ![]() в ясную погоду на всех рассматриваемых видах поляризации.
в ясную погоду на всех рассматриваемых видах поляризации.
Очевидно преимущество применения оптимальной, по критерию максимизации радиолокационного контраста, поляризации для работы РЛС ОЛП в сложных метеоусловиях.
Табл. 2. Зависимость дальности действия ![]() РЛС ОЛП от метеоусловий при вероятности правильного обнаружения
РЛС ОЛП от метеоусловий при вероятности правильного обнаружения 
Вид поляризации | Ясная погода | Условия сложной метеообстановки | |||||
Туман | Слабый дождь | Снег | Сильный дождь | ||||
| Обнаружение на основной поляризации. | на ГП | Не менее 20,00 | 19,38 | 17,91 | 17,57 | 12,78 |
на ВП | Не менее 20,00 | 19,39 | 17,64 | 17,29 | 13,14 | ||
Обнаружение целей на круговой поляризации. | Не менее 20,00 | 19,75 | 19,20 | 19,48 | 13,37 | ||
Обнаружение целей на кроссовой поляризации. | Не менее 20,00 | – | 18,61 | 16,82 | 18,29 | ||
Обнаружение целей на оптимальной поляризации. | Не менее 20,00 | 19,75 | 19,20 | 19,48 | 18,29 |
 Рис. 12. Зависимость дальности действия
Рис. 12. Зависимость дальности действия ![]() РЛС ОЛП от вида поляризации в сложных метеоусловиях
РЛС ОЛП от вида поляризации в сложных метеоусловиях
В четвёртом разделе диссертации разработаны рекомендации по применению методов радиополяриметрии для расширения диапазона применения РЛС ОЛП на основе анализа экспериментальных данных по отражающим свойствам наземных радиолокационных объектов, а также естественных и искусственных покровов и метеообразований в миллиметровом диапазоне волн.
Координаты собственного поляризационного базиса подстилающих покровов очень слабо зависят от наблюдаемого элемента поверхности. Об этом свидетельствует очень малое значение СКО для угла ![]() и небольшое значение СКО для угла
и небольшое значение СКО для угла ![]() . Устойчивость параметров
. Устойчивость параметров ![]() и
и ![]() к различным азимутальным углам свидетельствует о том, что исследуемые поверхности могут быть отнесены к классу диагональных объектов, а это значит, что существуют такие поляризационные базисы, в которых случайная матрица рассеяния может приводиться в диагональному виду или к виду, где один из диагональных элементов равен нулю, что эффективно можно использовать для подавления мешающих отражений.
к различным азимутальным углам свидетельствует о том, что исследуемые поверхности могут быть отнесены к классу диагональных объектов, а это значит, что существуют такие поляризационные базисы, в которых случайная матрица рассеяния может приводиться в диагональному виду или к виду, где один из диагональных элементов равен нулю, что эффективно можно использовать для подавления мешающих отражений.
Подстилающая поверхность при зондировании в миллиметровом диапазоне волн является, в отличии от радиолокационных целей, в общем случае поляризационно-изотропной средой. Использование алгоритмов функционирования одноканальных РЛС на излучение и приём, позволяющих формировать степень поляризационной анизотропии ![]() , даёт возможность легко модернизировать РЛС ОЛП с целью повышения их эффективности для решения задач обнаружения и распознавания объектов.
, даёт возможность легко модернизировать РЛС ОЛП с целью повышения их эффективности для решения задач обнаружения и распознавания объектов.
Радиолокационный контраст  есть произведение двух сомножителей, первый их которых не зависит от вида поляризации падающей волны (отношение полных ЭПР целей), а второй, учитывающий их поляризационную анизотропию, зависит от поляризации облучающей волны
есть произведение двух сомножителей, первый их которых не зависит от вида поляризации падающей волны (отношение полных ЭПР целей), а второй, учитывающий их поляризационную анизотропию, зависит от поляризации облучающей волны  :
:
 , (2)
, (2)
где ![]() и
и ![]() ,
, ![]() и
и ![]() – полные ЭПР и степени анизотропии первой и второй целей соответственно,
– полные ЭПР и степени анизотропии первой и второй целей соответственно, ![]() – центральный угол на сфере Пуанкаре между изображениями собственных базисов целей. Используя различия поляризационных параметров отраженных от подстилающих покровов и объектов наблюдения сигналов, можно добиться существенного повышения радиолокационного контраста.
– центральный угол на сфере Пуанкаре между изображениями собственных базисов целей. Используя различия поляризационных параметров отраженных от подстилающих покровов и объектов наблюдения сигналов, можно добиться существенного повышения радиолокационного контраста.
Расчеты показывают, что значение ![]() с высокой степенью точности может быть принято равным нулю. Это означает, что в рамках такого допущения собственной поляризацией для различных элементов подстилающей поверхности будет являться линейная поляризация, хотя для каждого элемента – своя. Следовательно, если собственной поляризацией какого-либо элемента разрешения окажется эллиптическая поляризация, то это будет свидетельствовать о наличии в этом элементе какой-либо цели, под которой вовсе не следует понимать обязательно некий новый объект, это может быть та же поверхность, но с резко выраженными иными отражательными характеристиками.
с высокой степенью точности может быть принято равным нулю. Это означает, что в рамках такого допущения собственной поляризацией для различных элементов подстилающей поверхности будет являться линейная поляризация, хотя для каждого элемента – своя. Следовательно, если собственной поляризацией какого-либо элемента разрешения окажется эллиптическая поляризация, то это будет свидетельствовать о наличии в этом элементе какой-либо цели, под которой вовсе не следует понимать обязательно некий новый объект, это может быть та же поверхность, но с резко выраженными иными отражательными характеристиками.
Устойчивость координат собственного поляризационного базиса различных элементов исследуемых покровов позволяет путем использования режима поляризационного сканирования свести задачу обнаружения цели к задаче определения индекса амплитудной модуляции ![]() отраженного сигнала. Например, при
отраженного сигнала. Например, при ![]() с вероятностью не ниже 0,95 можно говорить о наличии цели в исследуемом элементе разрешения. Вероятность ложной тревоги при этом составляет величину 0,01.
с вероятностью не ниже 0,95 можно говорить о наличии цели в исследуемом элементе разрешения. Вероятность ложной тревоги при этом составляет величину 0,01.
Как показывает анализ экспериментальных исследований фазовых характеристик сигналов, отраженных от подстилающих покровов в миллиметровом диапазоне волн, распределение разности фаз ![]() для подстилающей поверхности является Гауссовским с нулевым средним значением. С другой стороны, разность фаз линейной и кроссовой компоненты сигнала , отраженного от неровной поляризационно-изотропной поверхности, имеет равномерное распределение на интервале
для подстилающей поверхности является Гауссовским с нулевым средним значением. С другой стороны, разность фаз линейной и кроссовой компоненты сигнала , отраженного от неровной поляризационно-изотропной поверхности, имеет равномерное распределение на интервале ![]() , и не зависит от характеристик поверхности и условий измерения. Для радиолокационных целей средние значения разности фаз ортогонально поляризованных компонент рассеянного сигнала
, и не зависит от характеристик поверхности и условий измерения. Для радиолокационных целей средние значения разности фаз ортогонально поляризованных компонент рассеянного сигнала ![]() далеки от нулевых, а значения разности фаз
далеки от нулевых, а значения разности фаз ![]() распределены неравномерно и имеют некоторое ненулевое среднее значение и небольшое среднеквадратическое отклонение (10…20°). Отличия параметров
распределены неравномерно и имеют некоторое ненулевое среднее значение и небольшое среднеквадратическое отклонение (10…20°). Отличия параметров  ,
, ![]() для подстилающей поверхности и радиолокационных целей позволяет производить идентификацию целей на фоне подстилающих покровов по данным признакам.
для подстилающей поверхности и радиолокационных целей позволяет производить идентификацию целей на фоне подстилающих покровов по данным признакам.
Энергетические поляризационные признаки наиболее устойчивы к изменению ракурса цели, но сильно зависят от состояния подстилающей поверхности (наличия или отсутствия ветра) и величины разрешаемой площадки. К энергетическим поляризационным признакам относятся: полная ЭПР объекта ![]() , где
, где ![]() – комплексные коэффициенты поляризационной матрицы рассеяния; и параметр
– комплексные коэффициенты поляризационной матрицы рассеяния; и параметр ![]() .
.
В то же время комплексные признаки устойчивы к влиянию подстилающей поверхности и позволяют выделить объект в условиях мешающих отражений от подстилающей поверхности. Комплексными поляризационными признаками являются  и
и  , где
, где  ,
,  ,
,  – характеристический угол между собственными поляризациями.
– характеристический угол между собственными поляризациями.
Анализ экспериментальных данных показал, что комплексные поляризационные признаки являются более информативными по сравнению с энергетическими признаками, связанными с ЭПР целей. Вероятность обнаружения наземных объектов может быть существенно увеличена при накоплении поляризационной информации.
Установлено, что наиболее информативным и устойчивым признаком является ![]() . Выделение данного признака позволяет значительно повысить контраст малоразмерных объектов на фоне подстилающей поверхности. Это связано с тем, что сигнал формируется при отражении m групп его блестящих точек, а сигнал от подстилающее поверхности формируется большим количеством деполяризующих отражателей при отсутствии доминирующих центров отражения, что обуславливает гораздо большие пределы изменения разности фаз между согласованными поляризациями.
. Выделение данного признака позволяет значительно повысить контраст малоразмерных объектов на фоне подстилающей поверхности. Это связано с тем, что сигнал формируется при отражении m групп его блестящих точек, а сигнал от подстилающее поверхности формируется большим количеством деполяризующих отражателей при отсутствии доминирующих центров отражения, что обуславливает гораздо большие пределы изменения разности фаз между согласованными поляризациями.
Поляризационно-спектральные особенности обратного рассеяния от местности (участков суши, покрытых растительностью, гидрометеоров) и целей, состоящие в существенно более сильной корреляции отражений от целей, чем от местности, на ортогональных поляризациях могут использоваться для улучшения радиолокационной наблюдаемости малоразмерных объектов на их фоне. Физической предпосылкой их появления является существенно большая жесткость взаимного положения рассеивающих точек цели, чем помех. Для движущегося объекта, который является достаточно жесткой конструкцией, перемещения фазовых центров рассеяния на ортогональных поляризациях для «блестящих точек» также сильно коррелированны. Применение поляризационно-спектрального метода селекции позволяет улучшить наблюдаемость наземных объектов на фоне местности, покрытой растительностью на 4-10 дБ.
Круговая поляризация оказывается эффективным средством для подавления мешающих отражений от гидрометеоров только в условиях тумана и слабого дождя (не более 8…10 мм/час). При сильном дожде и снегопаде ее использование оказывается нецелесообразным, так, например, для обеспечения вероятности правильного обнаружения цели в этих условиях на уровне 0,9, ЭПР цели должна быть увеличена не менее чем в 2 раза. При уровне вероятности 0,95 соответствующая величина ЭПР возрастает в 3,5 раза.
Прием на кроссовую поляризацию может оказаться более эффективным, чем прием на КП в условиях сильного дождя, однако ЭПР на кроссовой поляризации для реальных целей оказывается, как правило, на порядок ниже, поэтому кроссовый прием целесообразен при наблюдении целей, располагаемых достаточно близко от РЛС (район аэропорта). Характеристики обнаружения при кроссовом приеме слабо зависят от метеоосадков.
ЗАКЛЮЧЕНИЕ
Целью настоящей работы являлось расширение диапазона применения РЛС ОЛП при селекции малоподвижных и неподвижных наземных объектов на фоне естественных и искусственных покровов, характерных для зоны аэропорта, а также в условиях сложной метеообстановки.
Для достижения поставленной цели в работе были решены следующие задачи:
1. Произведен анализ влияния мешающих отражений и метеообразований на эксплуатационные возможности РЛС ОЛП.
2. Произведен анализ отражательных характеристик естественных и искусственных покровов на территории аэропортов и объектов наблюдения РЛС ОЛП. Выявлены различия в поляризационной структуре отраженных от подстилающих покровов и объектов наблюдения сигналов.
3. Произведен анализ отражательных характеристик метеообразований, влияющих на функционирование РЛС ОЛП, и сигналов, отраженных от объектов наблюдения РЛС ОЛП в сложной метеообстановке.
4. Разработаны рекомендации по расширению диапазона применения РЛС ОЛП путем использования методов радиополяриметрии.
В ходе работы были получены следующие новые научные результаты:
1. Определены статистические характеристики элементов матрицы рассеяния естественных и искусственных покровов, характерных для зоны аэропорта, а также объектов наблюдения в миллиметровом диапазоне волн, подтвержденные экспериментальными данными.
2. Определены статистические характеристики элементов матрицы рассеяния метеообразований, а также объектов наблюдения в сложных метеоусловиях в миллиметровом диапазоне волн, подтвержденные экспериментальными данными.
3. На основе экспериментальных данных определено влияние вида поляризации на дальность действия РЛС ОЛП при их эксплуатации в сложных метеоусловиях.
4. Разработаны рекомендации по расширению диапазона применения РЛС ОЛП методами радиополяриметрии.
Полученные результаты дают возможность:
1. Повысить вероятность правильного обнаружения малоподвижных и неподвижных наземных объектов при наличии мешающих отражений от подстилающей поверхности и метеообразований.
2. Повысить контраст наблюдаемых малоподвижных и неподвижных объектов в зоне аэропорта на индикаторе РЛС ОЛП, и тем самым обеспечить работоспособность РЛС ОЛП в неблагоприятных погодных условиях.
3. Повысить уровень безопасности полетов (взлет, посадка) и предупреждения столкновения на земле.
4. Повысить интенсивность движения транспортных средств в районе аэродрома, а, следовательно, и интенсивность полетов воздушных судов.
По содержанию диссертационной работы опубликованы следующие работы:
В изданиях, входящих в перечень изданий, рекомендованных ВАК для опубликования основных научных результатов диссертаций:1.1. Прохождение радиолокационного сигнала через осадки и его отражение от наземных объектов // Научный Вестник МГТУ ГА, № 000, 2007.
1.2. Статистические характеристики матрицы прохождения, обусловленной наличием метеообразований в миллиметровом диапазоне волн // Научный Вестник МГТУ ГА, № 000, 2007.
1.3. Поляризационные характеристики подстилающих покровов в миллиметровом диапазоне волн // Научный Вестник МГТУ ГА, № 000, 2008.
1.4. Отражающие свойства и возможности поляризационной селекции наземных радиолокационных объектов в мм и см диапазоне // Научный Вестник МГТУ ГА, № 000, 2008.
1.5. О фазовых характеристиках сигнала отраженного от подстилающих покровов, относящихся к классу поляризационно-изотропных // Научный Вестник МГТУ ГА, № 000, 2008.
1.6. Применение поляризационной селекции для улучшения эксплуатационных характеристик РЛС ОЛП // Научный Вестник МГТУ ГА, № 000, 2009.
1.7. Методы и средства борьбы с мешающими отражениями в РЛС ОЛП // Научный Вестник МГТУ ГА, № 000, 2009.
1.8. Возможности расширения диапазона применения радиолокационных станций обзора летного поля в сложных метеооусловиях методами радиополяриметрии // Научный Вестник МГТУ ГА, № 000, 2010.
2. В прочих изданиях:
2.1. Дополнительные возможности повышения точности измерения дальности при нелинейной радиолокации. В кн.: Авиация и космонавтика 2007. Тезисы докладов 6-й Международной научно-технической конференции. – М., МАИ, 2007г., с. 84.
2.2. Особенности распределения разности фаз ортогональных компонент отраженного от подстилающих покровов сигнала в миллиметровом диапазоне волн. В кн.: Авиация и космонавтика 2008. Тезисы докладов 7-й Международной научно-технической конференции. – М., МАИ, 2008г., с. 143.
2.3. Координаты собственного поляризационного базиса подстилающих покровов в миллиметровом диапазоне волн. В кн.: Гражданская авиации на современном этапе развития науки, техники и общества. Тезисы докладов Международной научно-технической конференции. – М., МГТУ ГА, 2008г., с.143.
2.4. Особенности матрицы рассеяния подстилающих покровов в миллиметровом диапазоне волн. В кн.: XXXIV Гагаринские чтения. Труды Международной молодежной научной конференции. – М., МАТИ, 2008г., с. 159-160.
2.5. Отражающие свойства наземных радиолокационных объектов в мм и см диапазоне. В кн.: Авиация и космонавтика 2009. Тезисы докладов 8-й Международной научно-технической конференции. – М., МАИ, 2009г., с. 109-110.
2.6. Фазовые характеристики сигналов, отраженных от подстилающих покровов в мм и см диапазоне волн. В кн.: XXXV Гагаринские чтения. Труды Международной молодежной научной конференции. – М., МАТИ, 2009г.
2.7. Возможности поляризационной селекции наземных радиолокационных объектов в мм и см диапазоне. В кн.: XXXV Гагаринские чтения. Труды Международной молодежной научной конференции. – М., МАТИ, 2009г.
2.8. , Анализ отражающих характеристик наземных радиолокационных объектов в ММ и СМ диапазоне волн. Труды XV Международной научно-технической конференции «Радиолокация, навигация, связь (RLNC-2009)», Воронеж, 2009, том 2, с. .
2.9. , Анализ отражающих характеристик подстилающих покровов в миллиметровом диапазоне волн. Труды XV Международной научно-технической конференции «Радиолокация, навигация, связь (RLNC-2009)», Воронеж, 2009, том 2, с. .
2.10. Yamanov A. Polarization Characteristics of Underlying Covers in Millimeter-Wave. “Signal processing symposium SPS 2009”, Jachranka Village, May 28-30, 2009. Warsaw University of Technology – Institute of Electronic Systems, 2009, p. 420-425.
Соискатель Яманов А.Д.
[1] Эти и последующие зависимости построены на основании литературных источников и работ автора.
