


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Практическая работа № 2
Тема: Путевые системы автоматического управления
1 Цель работы: Ознакомится с принципом работы путевой системой автоматического управления.
2 Задание:
2.1 Изучить теоретические сведения
2.2 Выполнить схему расположения узлов органов управления.
2.3 Опишите принцип работы путевой системы управления.
2.4 Ответить на контрольные вопросы.
3 Теоретические сведения
Для управления рабочими органами станка широко применяют путевые системы управления, в которых используют неподвижные упоры, воздействующие на датчики (чаще всего пути и положения), которые являются задающими органами.
Упоры воздействуют на путевые переключатели, которые при помощи электрических, гидравлических и, реже, пневматических сигналов передают команды на соответствующий привод исполнительного механизма. Система упоров используется для путевого управления работой смежных агрегатов, для подачи команд от одного агрегата к другому, для управления циклами силовых головок, рабочих столов, для системы блокировки и сигнализации. Смена и подготовка программы обработки не требует больших затрат времени, что создает известную мобильность и технологическую гибкость систем управления с упорами.
Упоры могут выполнять две функции: ограничивать перемещение рабочих органов и управлять очередностью перемещений. В первом случае используются жесткие и переставные упоры, воздействующие на привод исполнительного органа в его конечном положении. Простейший вид жесткого упора для токарного станка изображен на рисунке 1. Во втором применяют путевые переключатели (рисунок 2).
Корпус упора (рисунок 1, а) 1 с помощью двух болтов закрепляется на станине станка. Рабочей поверхностью упора является торец винта 3, снабженного лимбом для точной установки. После выверки положения винт 3 закрепляется в требуемом положении с помощью гайки 2. упор подобного типа может определять только одно положение рабочего органа, что обычно является недостаточным. Этот недостаток устранен в конструкции поворотных или барабанных упоров (рисунок 1, б).
Кронштейн 2 жестко закреплен на скалке 3 сверлильного станка. В отверстиях кронштейна 2 и колодки 8 может вращаться с помощью рукоятки 1 валик 4, на котором закреплен барабан 6 с четырьмя Т-образными пазами. По каждому из пазов перемещается и закрепляется в требуемом положении колодка 7 с упорным винтом. При перемещении скалки 3 шпинделя станка вниз вместе с нею движется валик 4 с барабаном 6; та из колодок 7, которая находится в рабочем положении, в нужный момент упирается в неподвижный упор 5, ограничивая рабочее перемещение шпинделя станка.
Точность перемещения при соответствующей конструкции жестких упоров может достигать 0,01- 0,02 мм.
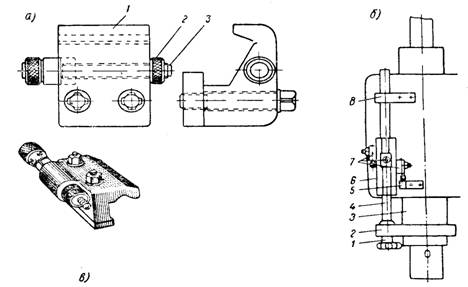
Рисунок 1 Упоры:
а - простой для продольного перемещения;
б – многопозиционный к сверлильному станку
а) б)
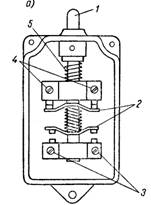
Рисунок 2 Датчики - переключатели
а) простого действия;
б) моментный переключатель
Переключатель (рисунок 2, а) работает следующим образом. При нажиме движущейся части рабочего органа на шток 1 планки 2 с подвижными контактами отходят вниз, верхние контакты 4размыкаются, а нижние 3 замыкаются. Как только воздействие на шток прекратится, контактные планки 2 под действием пружины 5 возвратятся в исходное положение.
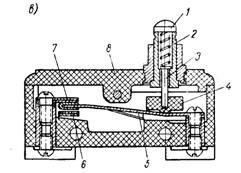
Если требуется получить действие датчика при очень малом перемещении штока (до 0,5-0,7 мм) и небольшом на него давлении(не более 1 кг), применяются моментные переключатели (рисунок 2, б). при воздействии упора рабочего органа на колпачок 1 он утапливается во втулке крышки 8 и через пружину 2 перемещает нажимной штырь3 с колодкой 4, изготовленной из изоляционного материала. Под действием колодки плоские пружины 5 перегибаются и, разомкнув контакт в точке 7, прижимаются к контакту 6. при прекращении воздействия упора на колпачок пружины принимают исходное положение.
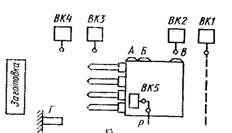
Рассмотрим путевую систему управления головкой горизонтально-сверлильного агрегата станка.
а ) б)
в)
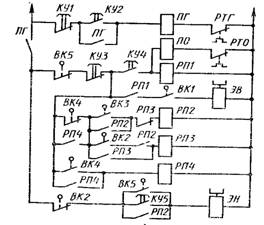
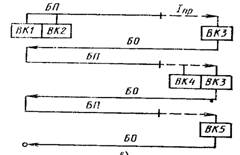
Рисунок 3 Путевая система управления
а) принципиальная схема; б) расположение узлов органов управления; в) циклограмма работы
В исходном положении конечные выключатели ВК1, ВК2 нажаты. Для включения станка в работу нажимают на кнопку КУ2 «Пуск», при этом включается двигатель шпинделя и гидронасоса. При нажатии на кнопку КУ4 «Цикл» включают промежуточное реле РП1, пускатель двигателя охлаждения ПО и, так как нажат ВК1, включается электромагнит гидропанели ЭВ. Начинается быстрый подвод головки к заготовке: ВК1, ВК2 освобождаются. Выключатель ВК2 своим размыкающим контактом подготовляет цепь питания электромагнита движения назад ЭН.
С помощью гидропанели происходит автоматическое переключение с быстрого хода на рабочую подачу. Окончание первого рабочего хода осуществляется с помощью ВКЗ, на него нажимает упор А, и контакт ВКЗ включает РП2. РП2 шунтирует контакты ВКЗ и включает ЭН, который переключает гидропанель. Происходит быстрый отвод головки в исходное положение, так как контакты ВКЗ оказались зашунтированными, то РП2 не отключается. В момент нажатия упора В на ВК2 реле РПЗ включается через контакты РП2, становится на самопитание и размыкающим контактом отключает РП2. Вновь при нажатии упора В на ВК1 включается ЭВ, осуществляется быстрый подвод к детали и начинается второй рабочий ход. На ВК3 нажимает упор А, однако РП2 включиться не может, так как размыкающий контакт РП 3 еще разомкнут. Головка, проходя дальше, нажимает упором А на ВК4, который размыкающим контактом отключает РПЗ, а замыкающим контактом включает РП4. Размыкающим контактом РП3 подготовляет цепь питания РП2. При нажатии упора Б на ВКЗ включается РП2, которое включает ЭН. Головка быстро отводится назад. Упор В сначала нажимает на ВК2, который отключает ЭН, а затем на ВК1, который включает ЭВ. Начинается подвод головки для выполнения третьего рабочего хода.
В конце третьего рабочего хода упор А нажимает на ВКЗ, ВК4, а затем упор Б — на ВК3. Однако никаких переключений в схеме не происходит, так как контакты ВК3, ВК4 зашунтированы контактами РП2, РП4. По окончании третьего рабочего хода упор Г, укрепленный на станке, нажимает на рычаг ВК5, размыкающий контакт которого отключает ЭВ, РП2, РП3, РП4, а замыкающий контакт включает ЭН. Головка возвращается в исходное положение и при нажатии упора В на ВК 2 отключает ЭН. Цикл можно повторить нажатием на КУ4.
Путевая система управления удобна тем, что она одновременно с управлением контролирует выполнение команд. Это означает, что если команда по каким-то причинам не выполняется или задерживается ее выполнение, то рабочий орган не занимает новую позицию и не обеспечивает выдачу последующей несовместимости команды. В связи с тем, что система управления контролирует только начальное и конечное положения исполнительного органа, то это приводит к недостаточной синхронизации управления несколькими исполнительными органами, работающими на одной позиции. Поэтому такие системы управления применяют при обработке деталей по так называемым прямоугольным циклам (ступенчатые валы, фрезерование плоских поверхностей, расположенных на разных уровнях и пр.). Управление системой упоров осуществляется исполнительным органом только по одной координате, что делает невозможным применение их для обработки деталей со сложным криволинейным профилем.
Путевые переключатели и конечные выключатели рабочей зоны станков нередко выходят из строя из-за попадания стружки, пыли, масла. Кроме того, сами датчики не являются достаточно надежными в работе. Это привело к созданию бесконтактных путевых переключателей, где отсутствуют контакты и механически изнашивающиеся части. Переключатель представляет собой чувствительный элемент, которым является индуктивный датчик, контролирующий перемещение ферромагнитного упора, жестко связанного с рабочим органом. При приближении ферромагнитного упора к индуктивному датчику в обмотках последнего происходит возрастание напряжение, что вызывает увеличение тока, воздействующего на схему управления.
Таким образом, системы управления упорами конструктивно просты, позволяют осуществлять дистанционное управление, а в сочетании с электромагнитными устройствами дают возможность автоматизировать одноинструментальную обработку простых и сложных деталей.
4 Контрольные вопросы:
4.1 Что называется системой автоматической управления?
4.2 Что представляет собой путевая система автоматического управления?
4.3 Какую еще функцию выполняет путевая система кроме управления?
4.4 Для каких операций применяется система упоров?
