

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
«ГОМЕЛЬСКИЙ ГОСУДАРСТВЕННЫЙ МАШИНОСТРОИТЕЛЬНЫЙ КОЛЛЕДЖ»
Электропривод и Автоматика
методические УКАЗАНИЯ по выполнению
ЛАБОРАТОРНОЙ РАБОТЫ №5
Исследование фотоэлектрического преобразователя перемещения.
специальность 2"Техническое обслуживание технического оборудования и средств робототехники в автоматизированном производстве"
специализация 2"Эксплуатация и наладка электронных систем управления в автоматическом производстве"
Разработчик преподаватель
___________________
Обсуждено и одобрено на заседании
цикловой комиссии
. ________________________________
________________________________
________№___
______________________
Гомель, 2010
Лабораторная работа №5
Исследование фотоэлектрического преобразователя перемещения.
Цель работы:
Изучить основные принципы работы фотоэлектрических преобразователей перемещения и их конструкцию. Получить практические навыки по определению характеристик импульсного фотоэлектрического преобразователя перемещения.Порядок выполнения работы:
Изучить краткие теоретические сведения о фотоэлектрических преобразователях перемещения. Опытным путём определить сигналы и характеристики импульсного датчика положения. Оформить отчет по лабораторной работе и сделать выводы.Порядок проведения опытных исследований:
Проверить отключен ли стенд от питающей сети, а так же проверить отключены ли все тумблеры на стенде. Проверить наличие напряжения на корпусе стенда. Подключить к стенду электромеханический агрегат. Снять с импульсного датчика положения защитный кожух. В ручную посчитать количество окон на растре. Подключить к стенду асцилограф. Подать напряжение на стенд. включив автомат. зайти в меню РКУ: POS-Strt. Вращая в ручную вал электромеханического агрегата, записать количество импульсов за один оборот. Включить осциллограф. Зарисовать сигналы подаваемые с импульсного датчика положения при вращении вала в разные стороны.Обработка результатов исследований
Таблица 1- результаты исследований
Количество окон на растре | |
Количество импульсов за один оборот |
Рисунок 5.1 - Пример оформления снятых с осциллографа импульсов.
Краткие теоретические сведения
Преобразователи угловых перемещений предназначены для информационной связи по положению между позиционируемым объектом и устройством числового программного управления (УЧПУ) или устройством цифровой индикации (УЦИ). Особенность угловых оптоэлектронных растровых преобразователей перемещений заключается в использовании в качестве меры длины радиальной шкалы, являющейся носителем регулярного и кодового растров. Возможность нанесения штрихов растров с субмикронной точностью на материалы с заданным коэффициентом линейного расширения, стабильность их геометрического положения, достаточно высокая степень защищенности конструктивного исполнения, а также их высокая устойчивость к внешним воздействиям обеспечили растровым преобразователям перемещений широкий спектр областей промышленного и научного применения.
Принцип работы преобразователей угловых перемещений основан на регистрации относительной величины прошедшего через растровое сопряжение потока оптического излучения как координатной-периодической функции взаимного углового положения регулярного растра шкалы и растров окон анализатора.
Преобразователь имеет два кинематически связанных функциональных звена: радиальную растровую шкалу 1, жестко связанную с валом преобразователя, и растровый анализатор 2 неподвижного считывающего узла. Радиальная растровая шкала (далее везде лимб) содержит две концентрические информационные дорожки: регулярного растра и референтной метки Б.
Растровый анализатор содержит окна инкрементного считывания и референтную метку Д. Окна позиционно согласованы с дорожкой регулярного растра лимба и имеют внутри растры A, А, B, В с шагом, равным шагу регулярного растра лимба. При этом, в каждой паре окон растры смещены друг относительно друга на величину равную половине их шага, а взаимный пространственный сдвиг растров между парами окон составляет четверть шага растров. Последовательно с растровыми окнами расположено прозрачное окно Г. Референтная метка Д позиционно согласована с дорожкой референтных меток лимба. Считывающий узел решает задачу реализации оптических растровых и кодовых сопряжений, информативно соответствующих величине углового перемещения, и задачу считывания, обработки и анализа текущих значений оптически информативных параметров указанных сопряжений.
Конструктивно эти задачи решает инкрементный узел преобразователя перемещений. Первую из них решает механическая часть этого узла, обеспечивая необходимую точность растрового сопряжения лимба и анализатора, а также соосность последних по отношению к оси вращения вала. Вторую - реализуют осветители, фотоприемники и плата электрической схемы выделения и обработки информации о перемещении. Излучающий диод 3, конденсор 7, формирующий параллельный пучок лучей осветителя, окна А, А, В, В анализатора и фотоприемник 6 образуют так называемый канал считывания. Требование повышенной точности преобразователей перемещений диктует применение двух или четырех диаметрально расположенных каналов считывания.
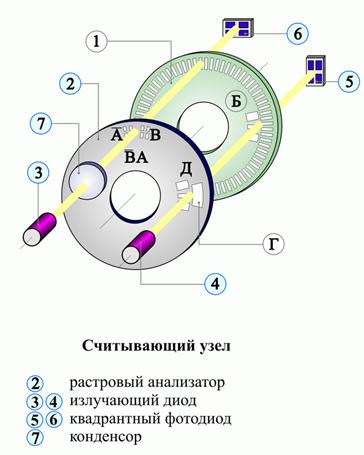
Рисунок 5.2 - Фотоэлектрический датчик перемещений.
Импульсный датчик положения имеет 90 отверстий и два фотодиода, смещенных относительно друг друга на расстояние соответствующее половине отверстия. Это позволяет при вращении датчика получить следующие диаграммы на выходе датчика положения.
Рисунок 5.3 – Выходные сигналы с датчика положения.
Счет импульсов происходит по обоим фронтам обоих последовательностей. Это позволяет получить 360 импульсов за один оборот диска, с определением направления вращения.
Контрольные вопросы
1. Каким образом фотоэлектрический датчик определяет в какую сторону вращается вал? Зачем нужны в схеме контакты K3.2 и К2.5?
2. Что такое код Грея?
3. С какой точнойстью фотоэлектрический датчик в электромеханическом агрегате определяет угол поворота вала?
4. Зачем нужен Конденсор, что он из себя представляет?
5. Что такое лимб?
6. Где используются фотоэлектрические датчики?
