
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Корректирующие устройства САР
Под улучшением качества процесса автоматического регулирования, помимо повышения точности в типовых режимах, понимается изменение динамических свойств автоматической системы с целью получения необходимого запаса устойчивости и быстродействия. В этой проблеме основное значение имеет обеспечение запаса устойчивости. Это объясняется тем, что стремление снизить ошибки регулирования приводит, как правило, к необходимости использовать такие значения общего коэффициента усиления, при которых без принятия специальных мер автоматическая система вообще оказывается неустойчивой.
В связи с этим повышение общего коэффициента усиления до значения, при котором обеспечивается выполнение требований к точности, обычно может производиться только при одновременном повышении запаса устойчивости автоматической системы, что осуществляется при помощи так называемых корректирующих устройств.
При решении задач повышения запаса устойчивости проектируемой автоматической системы прежде всего необходимо попытаться рациональным образом изменить ее параметры (коэффициенты усиления и постоянные времени) так, чтобы удовлетворять требованиям качества регулирования, которые определяются критериями качества. При невозможности решить эту задачу в рамках имеющейся автоматической системы приходится идти на изменение ее структуры. Для этой цели обычно используется введение в автоматическую систему так называемых корректирующих средств, которые должны изменить динамику всей автоматической системы в нужном направлении. К корректирующим средствам относятся, в частности, корректирующие звенья, представляющие собой динамические звенья с определенными передаточными функциями.
В случаях, когда корректирующие звенья используются именно для повышения устойчивости автоматической системы или для обеспечения ее запаса устойчивости, они называются иногда демпфирующими или стабилизирующими звеньями. При этом имеется в виду, что звенья демпфируют колебания, которые возникают в автоматической системе.
Термин "корректирующие звенья" является более широким и используется для звеньев, которые вводятся в автоматическую систему для изменения ее статических или динамических свойств с различными целями.
Получение требуемого быстродействия обычно обеспечивается при проектировании автоматической системы посредством выбора соответствующих элементов системы регулирования. Однако возможно улучшение быстродействия автоматической системы посредством использования корректирующих средств.
Необходимо заметить, что проблема получения в автоматической системе требуемых качественных показателей - точности, запаса устойчивости и быстродействия - является единой и ни один из входящих в нее вопросов не может решаться в отрыве от других. Это делает всю проблему весьма сложной, что заставляет в некоторых случаях получить требуемое решение посредством последовательного приближения и рассмотрения многих вариантов.
Одним из приемов обеспечения устойчивости и запаса устойчивости автоматической системы является введение в нее дополнительного элемента, который исправляет, корректирует свойства исходной автоматической системы, и называется корректирующим элементом.
Если этот элемент достаточно сложен, то он называется корректирующим устройством. Т. о. корректирующее устройство - это функциональный элемент автоматической системы, обеспечивающий требуемые для нее потребительские качества.
|

Смысл введения в автоматическую систему корректирующих устройств можно пояснить, рассмотрев их влияние на изменение частотных характеристик автоматической системы. Неустойчивая автоматическая система может быть приведена к устойчивой путем коррекции АФЧХ с обеспечением достаточного запаса устойчивости.
Отметим основные особенности постановки и решения задачи синтеза корректирующих устройств:
1. Обычно автоматическая система содержит объект регулирования и звенья с трудно изменяемыми параметрами и характеристиками, а также она содержит звенья с легко изменяемыми параметрами и характеристиками, которые служат для придания автоматической системе требуемых динамических свойств. Эти функции возлагаются на корректирующие устройства автоматических систем;
2. При синтезе корректирующих устройств важно знать оптимальные динамические характеристики автоматической системы, к реализации которых следует стремиться. Условия качества работы задаются лишь на верхние допустимые границы отдельных показателей качества. Они ограничивают лишь область допустимых значений, но не определяют однозначно характер переходного процесса. Поэтому задачей синтеза корректирующих устройств является получение требуемого качества работы, определяемого областью допустимых значений регулируемой величины;
3. Решение задачи синтеза корректирующих устройств не является однозначным. Одни и те же требования можно удовлетворить при помощи различных корректирующих устройств. На практике в таких случаях выбирают такое корректирующее устройство, которое технически наиболее просто осуществимо;
4. Вследствие сложности многих современных автоматических систем, являющихся динамическими системами со многими степенями свободы, содержащими кроме постоянных и переменные, а иногда и распределенные параметры. Во многих случаях нельзя получить точных результатов расчетным путем, поэтому теоретический анализ и расчет обычно имеют целью лишь облегчить выбор рациональной структурной схемы автоматической системы.
Синтез корректирующих устройств автоматических систем состоит из следующих этапов:
1. Анализа свойств объекта регулирования и определения его статических и динамических характеристик;
2. Формулировки и обоснования критерия оптимальности, условий качества регулирования и других требований, которым должна удовлетворять автоматическая система;
3. Выбора структурной схемы автоматической системы и технических средств ее реализации;
4. Синтеза оптимальных динамических характеристик автоматической системы;
5. Аппроксимации оптимального режима, т. е. выбора желаемых характеристик, отвечающих качеству регулирования и простотой технической реализации;
6. Определения желаемых динамических характеристик корректирующих устройств, обеспечивающих требуемые динамические свойства автоматической системы в целом;
7. Выбора схемы и способа технической реализации корректирующих устройств;
8. Анализа полученной схемы автоматической системы, цель которого состоит в проверке расчетным или экспериментальным путем соответствия полученного результата требованиям технического задания.
Существует три основных типа корректирующих устройств - последовательное, параллельное и обратная связь. Использование того или иного типа корректирующих устройств определяется удобством их технической реализации.
Последовательное |
|
|
Параллельное |
|
|
Обратная связь |
|
|
В некоторых учебниках и справочниках приводятся таблицы, содержащие схемы сотен корректирующих звеньев различного типа на все случаи жизни. В линейных автоматических системах динамические свойства их при введении корректирующих устройств различного типа могут быть сделаны одинаковыми, и для корректирующего устройства одного типа можно подобрать эквивалентное корректирующее устройство другого типа. Эквивалентность обозначает, что присоединение к системе автоматического регулирования одного или другого корректирующего устройства образует полностью подобные в динамическом отношении автоматические системы.
К основным корректирующим устройствам относятся:
1. Пассивные корректирующие устройства - это такие устройства, которые не требуют подвода энергии из вне автоматической системы;
2. Активные корректирующие устройства - это такие устройства, для нормального функционирования которых требуется подвод энергии от постороннего источника.
Последовательные корректирующие устройства могут составляться из различных по своей физической природе элементов - электрических, механических, гидравлических и т. д. Звенья последовательного типа особенно удобно применять в тех случаях, когда в автоматической системе используется электрический сигнал в виде напряжения постоянного тока, величина которого функционально связана с сигналом ошибки. Наиболее просто такие звенья могут быть реализованы из электрических R -, C -, L - элементов. Электрические последовательные корректирующие звенья имеют самое широкое распространение в системах автоматического регулирования, поэтому в дальнейшем они будут рассмотрены в первую очередь. Последовательные корректирующие звенья из R -, C -, L - элементов часто называют пассивными последовательными корректирующими устройствами.
Эти звенья оказываются значительно менее удобными, если сигнал представляет собой модулированное напряжение переменного тока. В этом случае имеется принципиальная возможность построения звеньев на тех же R -, C -, L - элементах, воздействующих на огибающую модулированного сигнала, но ввиду их сложности и недостатков они пока почти не находят применения. При наличии модулированного сигнала и при необходимости использования звеньев последовательного типа приходится устанавливать в канале переменного тока фазочувствительный демодулятор. После выпрямления и фильтрации сигнала от высших гармонических составляющих появляется возможность ввести корректирующее звено последовательного типа.
Однако такой путь часто связан с серьезными ухудшением динамических свойств автоматической системы вследствие влияния дополнительных постоянных времени фильтра, устанавливаемого на выходе демодулятора.
Существует весьма большое количество пассивных последовательных корректирующих звеньев.
Название и схема корректирующего устройства | Передаточная функция | Амплитудная частотная характеристика | Параметры | Логарифмическая амплитудная характеристика |
Интегрирующее |
|
|
|
|
Дифференцирующее |
|
|
|
|
Интегро-дифференцирующее |
|
|
|
|
Фазосдвигающее |
|
|
|
|
Антивибратор |
|
|
|
|

1. Дифференцирующие корректирующие звенья подавляют низкие частоты и вносят положительный фазовый сдвиг. Подавление низких частот обычно ухудшает показатели работы автоматической системы, снижает общий коэффициент усиления и увеличивает ошибки автоматического регулирования. Если восстановить на низких частотах коэффициент усиления введением дополнительного усиления, то такое звено будет усиливать и высокие частоты. Отличие пассивного последовательного дифференцирующего корректирующего звена заключается в том, что на несущей частоте коэффициент усиления должен быть отличным от нуля подобно тому, как для частотной характеристики аналогичного звена постоянного тока отличен от нуля коэффициент усиления нулевой частоте;
2. Интегрирующие корректирующие звенья подавляют усиление на высоких частотах и вносят в некотором интервале частот отрицательный фазовый сдвиг;
3. Интегро-дифференцирующие корректирующие звенья подавляют усиление в некотором интервале средних частот, а вносимый фазовый сдвиг вначале отрицателен, а затем с ростом частоты становится нулевым на частоте среза. При дальнейшем росте частоты фазовый сдвиг становится положительным;
4. Фазосдвигающие корректирующие устройства вносят отрицательный фазовый сдвиг при равенстве единице модуля частотной передаточной функции, что соответствует прохождению гармонического сигнала любой частоты без изменения его амплитуды;
5. Антивибраторы по своим свойствам противоположны консервативному звену и на некоторой частоте имеют модуль коэффициента усиления, равный нулю.
Последовательные корректирующие устройства могут быть построены на механических элементах - на пружинах и демпферах. В таблице изображены три основных пассивных звена: интегрирующее, дифференцирующее и интегро-дифференцирующее.
Название и схема корректирующего устройства | Передаточная функция | Параметры |
Интегрирующее |
|
|
Дифференцирующее |
|
|
Интегро-дифференцирующее |
|
|

Передаточные функции этих звеньев полностью совпадают с передаточными функциями соответствующих звеньев, выполненных на R -, C -, L - элементах.
Интегрирующие корректирующие устройства осуществляют повышение порядка астатизма автоматической системы.
|
С точки зрения уменьшения уровня шумовых помех автоматическую систему целесообразно корректировать интегрирующим контуром, который, позволяет увеличивать коэффициент усиления автоматической системы, не увеличивая ее частоты среза. С помощью интегрирующего контура целесообразно осуществлять коррекцию также тех автоматических систем, от которых требуется большой коэффициент усиления (высокая динамическая точность) и используются для устранения установившихся ошибок в различных типовых режимах: в неподвижном положении, при движении с постоянной скоростью, при движении с постоянным ускорением и т. д. Формально это сводится к тому, чтобы сделать равным нулю первые коэффициенты ошибки автоматической системы. Физически повышение порядка астатизма осуществляется за счет введения в канал регулирования интегрирующих звеньев.
Результирующая передаточная функция разомкнутой системы будет иметь дополнительный множитель р в знаменателе:
Повышение порядка астатизма неблагоприятно сказывается на устойчивости автоматической системы. Поэтому одновременно с повышением порядка астатизма в автоматической системе приходится использовать дополнительные корректирующие устройства, повышающие запас устойчивости.
Дифференцирующие корректирующие устройства повышают порядок астатизма автоматической системы без заметного или недопустимого ухудшения запаса устойчивости.
|
При коррекции автоматических систем с помощью последовательных дифференцирующих устройств с увеличением коэффициента усиления системы увеличивается и частота среза. При отсутствии помех, действующих на вход системы, это способствует улучшению показателей качества системы: с увеличением коэффициента усиления системы уменьшается установившаяся ошибка, а увеличение частоты среза приводит к уменьшению времени регулирования. Однако если вместе с задающим воздействием на систему поступают помехи, то дифференцирующий контур, как правило, не дает желаемых результатов. В этом случае система должна удовлетворительно про пускать сигнал и наиболее эффективно подавлять помехи. Задающее воздействие обычно представляет собой медленно изменяющуюся функцию времени и поэтому eгo частотный спектр является узким, расположенным в области низких частот. Помехи же изменяются быстрее во времени, поэтому имеют более высокочастотный спектр, чем задающее воздействие. Следовательно, для получения минимальных ошибок при наличии помех система должна иметь узкую полосу пропускания в области низких частот (малую частоту среза) и возможно большой коэффициент усиления.
Передаточная функция изодромного устройства может быть представлена в виде:
Следует заметить, что введение изодромного устройства с большой постоянной времени Т образует систему, динамические качества которой могут оказаться сравнительно низкими. Это объясняется тем, что введение такого устройства улучшает вид амплитудной характеристики только в низкочастотной области. В результате коэффициенты ошибки, следующие за тем коэффициентом, который обращается в нуль, могут не только не уменьшиться, но и возрасти.
Для дальнейшего повышения порядка астатизма автоматической системы могут применяться не один, а два, три и более изодромных устройств. В этом случае можно полусить повышение порядка астатизма на один, два, три и более в зависимости от необходимости.
Недостатки последовательных корректирующих устройств:
- недостаточная эффективность работы;
- дифференцирующие RC-цепочки чувствительны к помехам.
Параллельные корректирующие устройства удобно применять в тех случаях, когда необходимо осуществить сложный закон автоматического регулирования с введением интегралов и производных от сигнала ошибки. Введение производных и интегралов в закон автоматического регулирования предназначается для улучшения динамических качеств автоматической системы.
Введение интегралов преследует цель снижения установившейся ошибки. Введение производных преследует обычно цель обеспечения устойчивости. В этом случае используются звенья дифференцирующего типа, включаемые параллельно основной цепи.
|
|
|
В таблице дифференцирующие звенья изображены идеальными. Более вероятно, что они будут представлять собой реальные дифференцирующие звенья.
Порядок операций для определения передаточной функции параллельного корректирующего устройства:
- строится ЛАЧХ той части автоматической системы, схема и параметры которой предполагается заданными;
- строится желаемая ЛАЧХ автоматической системы;
- строится ЛАЧХ корректирующего устройства и изменяемой части автоматической системы;
- уточняется функциональная схема автоматической системы и корректирующих устройств;
- проверяется эффективность работы модернизированной автоматической системы.
Преимущества параллельных корректирующих устройств:
- динамические свойства автоматической системы мало зависят от изменения характеристик отдельных звеньев;
- малое влияние помех на качество работы автоматической системы;
- высокая эффективность работы корректирующих устройств.
Недостатки параллельных корректирующих устройств:
- дорогие и громоздкие элементы;
- высокие коэффициенты усиления.
Заметим, что введение параллельных корректирующих звеньев, представляющих собой интеграторы, соответствует поднятию нижних частот. Введение параллельных корректирующих звеньев, представляющих собой дифференциаторы, соответствует поднятию верхних частот.
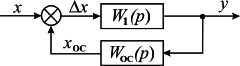
Обратная связь находит наиболее широкое применение вследствие простоты технической реализации. Это объясняется тем обстоятельством, что на вход обратной связи поступает сигнал сравнительно высокого уровня, часто даже непосредственно с выхода автоматической системы, промежуточного серводвигателя или выходного каскада усиления. Другое не менее важное обстоятельство заключается в том, что корректирующие устройства различного типа оказывают различное влияние на содержащиеся в автоматической системе нелинейности.
|
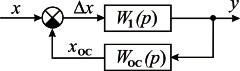
Как уже отмечалось, обратные связи могут быть положительными и отрицательными. Кроме того, обратные связи бывают жесткими и гибкими.
Рассмотрим передаточную функцию, записанную для случаяотрицательной обратной связи.
Из этого выражения найдем передаточную функцию для установившегося режима. Здесь может быть два случая.
Если выполняется условие Woc(p) = 0, что будет при использовании в цепи обратной связи дифференцирующих элементов. Такая обратная связь называется гибкой. Нетрудно видеть, что гибкая обратная связь действует только в переходных режимах, а в установившемся режиме она как бы отключается.
Если выполняется условие Woc(p) > 0, то обратная связь действует не только в переходном, но и в установившемся режиме. В этом случае обратная связь называется жесткой.
Заметим, что понятие гибкой или жесткой обратной связи связано с той величиной, которая принимается в качестве выходной в исходном звене. Так, например, обратная связь может быть гибкой по отношению к углу поворота вала двигателя и жесткой по отношению к скорости его вращения, которая является первой производной от угла поворота.
В динамическом отношении отрицательные обратные связи могут оказывать самое различное действие. Однако, подобно тому как это было сделано для последовательных корректирующих устройств, можно наметить три основных вида отрицательных обратных связей:
- обратные связи, подавляющие высокие частоты (аналоги пассивного последовательного интегрирующего звена);
- обратные связи, подавляющие низкие частоты (аналоги пассивного последовательного дифференцирующего звена);
- обратные связи, подавляющие средние частоты (аналоги пассивного последовательного интегро-дифференцирующего звена).
Особенно важно иметь возможность перехода от последовательного корректирующего звена к эквивалентной обратной связи. Это определяется тем, что расчетным путем наиболее просто определить параметры последовательного корректирующего звена, а с точки зрения технического осуществления наиболее удобны обратные связи.
Положительные обратные связи находят значительно меньшее распространение в качестве корректирующих средств по сравнению с отрицательными.
|
Встречается применение положительных обратных связей в качестве так называемых корректоров ошибки.
Положительные обратные связи находят также применение в магнитных усилителях с целью уменьшения постоянных времени последних при сохранении коэффициента усиления по мощности. При помощи жесткой положительной обратной связи можно в одинаковое число раз увеличить коэффициент усиления по напряжению и постоянную времени усилителя. При заданном значении коэффициента усиления по мощности усилитель с положительной обратной связью будет иметь меньшее значение результирующей постоянной времени.
Если обратная связь охватывает участок канала автоматического регулирования, содержащий какую-либо нелинейность, например силы трения, люфт, зону нечувствительности и т. п., то влияние этой нелинейности на протекание процессов в автоматической системе меняется существенным образом. Отрицательные обратные связи имеют свойство уменьшать влияние нелинейностей тех участков цепи автоматического регулирования, которые ими охватываются. Так как практически все автоматические системы содержат те или иные нелинейности, ухудшающие качество автоматического регулирования, то использование корректирующих устройств в виде отрицательных обратных связей, как правило, дает возможность добиться лучших результатов по сравнению с другими типами корректирующих устройств.
Аналогичным образом отрицательные обратные связи дают значительно лучший эффект в тех случаях, когда вследствие воздействий внешних факторов (время, температура и т. п.) меняется коэффициент усиления какой-либо части цепи автоматического регулирования, охватываемой отрицательной обратной связью.
Производная в закон автоматического регулирования может быть введена различными способами.
Например, к исследуемой автоматической системе подключается дифференцирующее устройство. Управляющее воздействие на объект регулирования оказывается пропорциональным не только заданной величине, но и производной регулируемой величины.
|
Наличие производной в законе автоматического регулирования тормозит действие автоматического регулятора на участке уменьшения отклонения регулируемой величины.
Таким образом, если в закон автоматического регулирования введена производная, то автоматический регулятор реагирует не только на то, какое значение имеет отклонение регулируемой величины в данный момент времени, но также на то, будет ли отклонение в последующие моменты времени убывать или возрастать и с какой скоростью. Учитывая это, говорят, что автоматический регулятор работает как бы с опережением, улучшая качество процесса автоматического регулирования за счет учета тенденции последующего развития процесса.
Следует отметить, что при возмущающих воздействиях в виде внезапных толчков, когда сразу появляется конечная скорость отклонения, автоматический регулятор, имеющий производную в законе автоматического регулирования, реагирует сразу по возникшей величине производной, даже до появления отклонения регулируемой величины. Это предотвращает большие забросы регулируемой величины, которые могли бы быть при отсутствии производной в закон автоматического регулирования.
В заключение хотелось бы отметить, что необходимое изменение динамических свойств автоматической системы может быть осуществлено как включением последовательных корректирующих устройств, так и охватом некоторых звеньев системы местной обратной связью (с помощью параллельных корректирующих устройств). Во многих случаях последовательные корректирующие устройства могут быть осуществлены в виде простых пассивных RС контуров и реализованы на операционных усилителях или цифровых элементах. В простоте последовательных корректирующих устройств состоит их достоинство. Недостатком последовательной коррекции является то, что эффект коррекции уменьшается в процессе эксплуатации при изменении параметров (коэффициента усиления, постоянных времени) последовательно соединенных элементов системы. Поэтому при последовательной коррекции к стабильности элементов предъявляются обычно повышенные требования.
Коррекция с помощью обратных связей имеет следующие достоинства:
1) уменьшается зависимость показателей качества автоматической системы от изменения параметров ее элементов, поскольку в существенном диапазоне частот передаточная функция участка автоматической системы, охваченного обратной связью, определяется обратной величиной передаточной функции параллельного корректирующего устройства. Поэтому требования к элементам автоматической системы могут быть менее жесткими, чем при последовательной коррекции;
2) нелинейные характеристики элементов, охваченных обратной связью, «линеаризуются», так как передаточные свойства охваченного участка системы определяются параметрами контура в цепи обратной связи;
3) питание параллельного корректирующего устройства даже в том случае, когда оно требует большой мощности, не вызывает затруднений, так как обратные связи обычно начинаются от оконечных звеньев автоматической системы с мощным выходом;
4) параллельное корректирующее устройство работает при меньшем уровне помех, чем последовательное, так как сигнал, поступающий на нeгo, проходит через всю систему, являющуюся хорошим фильтром нижних частот.
Благодаря этому эффективность действия параллельного корректирующего устройства при наложении помех на сигнал ошибки снижается в меньшей степени, чем последовательнoгo.
Коррекции с помощью обратной связи присущи и недостатки:
1) параллельные корректирующие устройства часто представляют собой дорогие или громоздкие элементы (например, тахогенереторы, дифференцирующие трансформаторы);
2) контур, образованный местной обратной связью, может оказаться сам по себе неустойчивым.
Последовательная коррекция в основном применяется в маломощных системах. Это объясняется, с одной стороны, простотой последовательных корректирующих устройств, а с другой, нецелесообразностью применения в этих системах громоздких, соизмеримых с размерами исполнительного двигателя, параллельных корректирующих устройств (например, тахогенератора). Коррекцию более мощных систем чаще Bceгo осуществляют с помощью параллельных корректирующих устройств. Иногда для достижения необходимых показателей качества системы сочетается коррекция как с помощью последовательных, так и параллельных устройств.
