
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Оценка качества процессов регулирования
Система может быть устойчивой, т. е. ее переходный процесс носит затухающий характер, но время затухания настолько велико или ошибка в установившемся режиме настолько большая, что практически данная система не может быть использована. Поэтому система должна быть не только устойчивой, но и иметь определенный переходный процесс, а ее ошибки в установившихся режимах не должны превышать допустимых.
Для сравнительного анализа различных автоматических систем необходимо иметь некоторые числовые характеристики этих систем, позволяющие оценивать, какая из них будет более эффективной. Эти числовые характеристики и называются критериями качества.
Критерии качества позволяют дать количественную оценку различным автоматическим системам и тем самым обоснованно подойти к выбору системы и ее закона управления, удовлетворяющему выбранному критерию качества.
Комплекс требований, определяющих поведение автоматической системы в установившихся и переходных процессах отработки заданного воздействия, определяется понятием "качество процесса регулирования" или "качество автоматической системы".
Автоматическая система называется качественной, если она удовлетворяет определенным технологическим требованиям: например, как будет меняться реакция автоматической системы, если на ее вход действуют различного рода возмущения как по каналу управления, так по каналу возмущения, т. е. обеспечивается ли принципиальная возможность прихода автоматической системы в некоторое установившееся состояние. Такое понятие качества автоматической системы охватывает ее статические и динамические свойства, выраженные в количественной форме и получившие название показателей качества автоматического регулирования.
Учитывая большое разнообразие автоматических систем и объектов регулирования, в настоящее время разработано большое число различных критериев, которые, с одной стороны, включают взаимоисключающие требования, а с другой - между показателями качества существует тесная взаимосвязь, поэтому стремление улучшить какой-либо из них может привести к ухудшению другого. Так, например, стремление уменьшить ошибку автоматического регулирования приводит к уменьшению запаса устойчивости и быстродействия и наоборот, или повышение надежности автоматической системы неизбежно приводит к увеличению ее стоимости.
Мы уже знаем, что автоматическая система прежде всего должна быть устойчивой, однако это необходимое, но недостаточное условие для эффективной работы автоматической системы. В устойчивой системе переходный процесс затухает. Однако для практики вовсе не безразличен характер затухания переходного процесса. Так, например, если переходный процесс затухает медленно, и система долго входит в новый установившийся режим, то она обладает недостаточным быстродействием, и, следовательно, ее применение будет ограничено. Поэтому устойчивость является необходимым, но недостаточным условием работоспособности автоматических систем. Достаточным условием является качество процессов регулирования, которое оценивается качеством переходных процессов и ошибками в установившихся режимах.
Оценки качества работы автоматических систем, полученные непосредственно по кривым переходного процесса, называют прямыми. Вычисление всех этих критериев основывается на использовании математического аппарата управления, причем наиболее часто при вычислении критериев качества используются временные и частотные характеристики автоматических систем. Анализ переходных процессов сводится к отысканию общего решения неоднородного дифференциального уравнения, описывающего физические процессы в автоматической системе при заданных начальных условиях и известных внешних воздействиях, а также к анализу влияния изменения параметров автоматической системы на вид этого решения. Следует отметить, что аналитическое решение уравнений требует вычисления корней характеристического уравнения и вычисления постоянных интегрирования, что для уравнений выше третьего порядка невозможно.
Поэтому применяют приближенные методы анализа переходных процессов, не требующие, так же как и при исследовании устойчивости автоматических систем, непосредственного решения дифференциальных уравнений. Чаще всего при анализе качества работы автоматических систем требуется лишь установить, находится ли переходный процесс внутри области допустимых значений регулируемой величины или выходит за ее пределы. Оценки, получаемые этим методом, называют косвенными.
Прямые показатели качества переходных процессов. Качество переходных процессов обычно оценивают по переходной функции, которая представляет собой реакцию автоматической системы на внешнее воздействие типа единичного скачка. На примере переходной функции познакомимся с основными показателями качества переходного процесса:
1. Ошибка регулирования;
2. Время регулирования;
3. Перерегулирование;
4. Степень колебательности;
5. Количество колебаний.
Использование того или иного показателя работы автоматической системы или их комбинации в виде критериев качества определяется удобством его применения в системах автоматического регулирования, а также, в известной мере, сложившимися традициями.
Ошибка регулирования равна разности между требуемым и действительным значениями регулируемой величины e (t) = x (t) - y (t). Знание мгновенного значения ошибки в течение всего времени работы объекта регулирования позволяет наиболее полно судить о свойствах автоматической системы. Однако в действительности, вследствие случайности задающего и возмущающего воздействий, такой подход не может быть реализован. В практике анализа автоматических систем используется метод исследования в различных типовых режимах.
![]() В качестве первого из типовых режимов рассматривается установившееся состояние при постоянных значениях задающего и возмущающего воздействий. Ошибка автоматической системы в этом случае называется статической. Величина ошибки может быть найдена из общего выражения e (t) = x (t) - y (t).
В качестве первого из типовых режимов рассматривается установившееся состояние при постоянных значениях задающего и возмущающего воздействий. Ошибка автоматической системы в этом случае называется статической. Величина ошибки может быть найдена из общего выражения e (t) = x (t) - y (t).
Для статических автоматических систем определяется абсолютное e и относительное d значения ошибки регулирования. Относительное значение ошибки регулирования можно вычислить по выражению

Для астатических автоматических систем пользуются правилом, которое позволяет установить, устраняет ли астатический регулятор статическую ошибку от какого-либо либо возмущения. Для выполнения этого необходимо, чтобы интегрирующее звено было включено в цепь регулирования до места приложения данного возмущения. Это объясняет тот факт, что включение интегрирующих элементов и повышение степени астатизма не дает возможности устранить ошибку чувствительного элемента, которую можно рассматривать как возмущение.
![]() В качестве второго типового режима используется режим движения с постоянной скоростью v = const, который будет наблюдаться в установившемся состоянии при задающем воздействии, изменяющимся по закону x (t) = v t и при постоянных значениях возмущающих воздействий. Этот режим преимущественно применяется в следящих системах и системах программного регулирования.
В качестве второго типового режима используется режим движения с постоянной скоростью v = const, который будет наблюдаться в установившемся состоянии при задающем воздействии, изменяющимся по закону x (t) = v t и при постоянных значениях возмущающих воздействий. Этот режим преимущественно применяется в следящих системах и системах программного регулирования.
![]() Третьим типовым режимом является установившееся движение с постоянным ускорением a = const. В этом случае задающее воздействие меняется по закону
Третьим типовым режимом является установившееся движение с постоянным ускорением a = const. В этом случае задающее воздействие меняется по закону
![]()
Возмущающее воздействие принимается постоянным. Этот режим практически используется только в следящих системах и системах программного регулирования.
![]() Четвертым типовым режимом является движение по гармоническому закону. Такой режим используется весьма часто, так как он позволяет наиболее полно оценить динамические свойства автоматической системы. Задающее воздействие изменяется по закону
Четвертым типовым режимом является движение по гармоническому закону. Такой режим используется весьма часто, так как он позволяет наиболее полно оценить динамические свойства автоматической системы. Задающее воздействие изменяется по закону
![]()
В зависимости от конкретного вида автоматической системы возмущающие воздействия в рассматриваемом режиме могут оставаться постоянными или изменяться во времени.
Во всех режимах в зависимости от постоянства или изменения возмущающих воздействий появляется некоторая абсолютная e (t) или относительная d (t) постоянная ошибка. Более вероятным является случай, когда возмущающие воздействия при движении автоматической системы в этом режиме меняются во времени. то объясняется тем, что при движении по гармоническому закону непрерывно будет меняться направление движения автоматической системы, а следовательно, одновременно будет меняться напрявление действующих в автоматической системе сил сухого трения. Этот случай является довольно сложным, и он может рассматриваться только в приложении к конкретным автоматическим системам.
Время регулирования tp определяется длительностью переходного процесса. Теоретически переходный процесс длится бесконечно долго, однако практически считают, что он заканчивается, как только отклонение регулируемой величины от нового ее установившегося значения не будут превышать допустимых пределов |у (t) - ууст | < D.
Определение времени переходного процесса
Обычно D = 3 ... 5 % от установившегося значения hуст. Временем регулирования характеризуют быстродействие системы. Однако иногда быстродействие характеризуют также временем ty достижения переходной функцией первый раз нового установившегося значения или временем tmax достижения максимального значения hmax. В особых случаях значение D оговаривается отдельно.
При анализе составляющих времени переходных процессов часто обращают внимание на следующие величины.
Время запаздывания tз , равное отрезку времени с момента приложения входного скачкообразного сигнала до момента времени, когда регулируемая величина достигает половины установившегося значения.
Время нарастания tн max , равное отрезку времени, заключенному между точкой пересечения оси времени с касательной, проведенной к осредненной кривой переходной характеристики в точке пересечения указанной касательной с горизонтальной прямой, соответствующей установившемуся значению регулируемой величины.
Перерегулирование или выброс, представляет собой максимальное отклонение регулируемой величины от нового установившегося значения. Обычно первый максимум является наибольшим. Относительное перерегулирование вычисляют по формуле:
Время регулирования и перерегулирование, основные показатели переходного процесса, тесно связаны между собой. На первый взгляд может показаться, что перерегулирование недопустимо, так как оно увеличивает время регулирования.
Однако это не так. Действительно, перерегулирование появляется вследствие того, что автоматическая система к новому установившемуся состоянию подходит с определенной скоростью, которая графически отображается тангенсом угла наклона касательной. Чем больше эта скорость, тем дальше за новое установившееся положение пройдет регулируемая величина по инерции. Значит, для уменьшения перерегулирования необходимо уменьшить скорость, с которой система подходит к новому установившемуся состоянию. Это, в конце концов приведет к увеличению времени регулирования. Если регулируемая величина подходит к установившемуся значению с нулевой скоростью, то перерегулирования вообще не будет, но время регулирования значительно увеличится.

График переходной функции с большим перерегулированием и при отсутствии перерегулирования
Так как время регулирования характеризует быстродействие системы, то стремятся, там где это необходимо, свести его к минимуму. Это значит, что автоматическая система должна отрабатывать задающее воздействие с большой скоростью, что в итоге приводит к перерегулированию. Так как переходный процесс колебательный, то будут иметь место большие ускорения регулируемой величины, что может вызвать недопустимо большие динамические нагрузки отдельных звеньев автоматической системы. Поэтому допускают перерегулирование в пределах 20 %. Для некоторых автоматических систем перерегулирование вообще не допустимо.
Числовые значения времени регулирования и перерегулирования часто задают в качестве исходных данных для синтеза корректирующих устройств, поскольку правильным выбором и настройкой последних обеспечивается подавление нежелательных колебаний регулируемой величины в переходном процессе. Необходимо иметь в виду, что стремление уменьшить время регулирования приводит к увеличению мощности исполнительных устройств.
Степень колебательности используется для оценки запаса устойчивости и для оценки качества регулирования. Степень колебательности характеризует затухание наиболее медленно затухающей составляющей переходного процесса.
Степень колебательности автоматической системы оценивают по отношению модуля комплексного коэффициента усиления замкнутой автоматической системы на частоте среза к модулю комплексного коэффициента усиления на частоте w = 0. Для удовлетворительного протекания переходного процесса автоматическая система должна иметь модуль комплексного коэффициента усиления в пределах 1,2 ... 1,4.
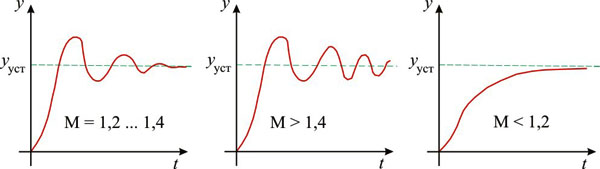
Чем меньше запас устойчивости, тем больше склонность автоматической системы к колебаниям и тем выше резонансные пики амплитуды регулируемой величины. Максимально допустимые значения показателя колебательности определяется на основании опыта эксплуатации автоматических систем. Считается, что в хорошо демпфированных автоматических системах показатель колебательности не должен превосходить значений 1,1 ... 1,2, хотя в некоторых случаях можно допускать величины до 2,0 ... 2,2.
При больших значениях модуля комплексного коэффициента усиления колебательный процесс затухает медленно. При значениях модуля комплексного коэффициента усиления менее 1,2 колебательный процесс становится апериодическим и быстродействие автоматической системы, как привило, становится низким.
Для отыскания показателя колебательности автоматической системы нет необходимости строить амплитудную частотную характеристику или отыскивать максимум переходной характеристики. Существуют методы, позволяющие найти показатель колебательности по виду амплитудно-фазовой характеристики разомкнутой автоматической системы, которые предполагают построение запретной области для фазовой частотной характеристики.
Чтобы показатель колебательности был не больше заданного значения, фазовая частотная характеристика не должна заходить в эту область. Удобство показателя колебательности определяется также тем, что запас устойчивости характеризуется здесь одним числом, имеющим для достаточно широкого класса автоматических систем сравнительно узкие пределы 1,1 ... 1,5.
Оценка качества автоматических систем по временным характеристикам весьма наглядна и может быть экспериментально проведена для выполненных систем, что является несомненным достоинством временных показателей качества.
Для вновь проектируемых автоматических систем временные показатели качества менее удобны, так как требуют вычисления переходных характеристик, что для автоматических систем высокого порядка является достаточно сложной вычислительной задачей. Более простым в вычислительном отношении является определение корней характеристического уравнения замкнутой системы и частотных характеристик, поэтому наряду с временными критериями качества широко используются и косвенные критерии качества, основанные на вычислении корней характеристического уравнения замкнутой автоматической системы и частотных характеристик.
Число колебаний регулируемой величины в течение времени переходного процесса оценивает качество работы автоматической системы непосредственно по опытным или расчетным кривым, а также по каким-либо другим динамическим параметрам.
Косвенные методы оценки. Всестороннюю оценку качества переходного процесса производят по графику переходной функции, вычисление и построение которого является довольно сложной и громоздкой задачей. В связи с этим возникает вопрос: нужно ли знать все детали переходного процесса? В самом деле, для решения практических задач вовсе не обязательно точное соблюдение какой-либо определенной формы переходной функции, поэтому не надо знать и все прямые показатели качества. Таким образом, построив с определенными трудностями график переходной функции, мы получаем значительно больше данных, чем это требуется для расчетов в технике автоматического регулирования. Поэтому при исследовании качества регулирования не всегда необходимо строить кривую переходного процесса. Такая постановка задачи приводит к изысканию косвенных методов оценки переходного процесса.
Косвенными оценками называют некоторые числа, характеризующие отдельные стороны переходного процесса. Эти числа можно найти сравнительно простыми средствами без построения графика переходного процесса. Большое достоинство косвенных оценок состоит в том, что позволяют в некоторой степени судить о влиянии параметров автоматической системы на ее динамические свойства.
Существует несколько косвенных оценок качества переходных процессов:
1. Оценка по частотным характеристикам;
2. Интегральные оценки;
3. Чувствительность автоматических систем.
Оценка по частотным характеристикам. Рассмотрим, как можно оценить переходный процесс по частотным характеристикам замкнутой автоматической системы. Частотные критерии качества не рассматривают вида переходного процесса а базируются на некоторых частотных свойствах автоматической системы. Частотные критерии качества особенно удобно применять при использовании частотных методов расчета, так как при этом получается наиболее простое решение поставленной задачи.
Частотные критерии наиболее разработаны в отношении оценки запаса устойчивости. Запас устойчивости можно определять по удалению амплитудно-фазовой характеристики разомкнутой автоматической системы от точки (-1, 0j). Для этой цели вводятся понятия запаса устойчивости по амплитуде и запаса устойчивости по фазе.
При использовании частотного метода анализа переходных процессов исходными данными могут быть, в основном, экспериментальные частотные характеристики. Этот метод позволяет:
- производить полный анализ динамики и синтез корректирующих устройств;
- учитывать своеобразие автоматической системы, которое заключается в том, что их анализ в разомкнутом состоянии обычно проще, чем в замкнутом;
- осуществлять анализ устойчивости переходных процессов и качества регулирования в автоматических системах любого порядка как одноконтурных, так и многоконтурных, содержащих не только сосредоточенные, но и распределенные параметры;
- решать задачи анализа и синтеза автоматических систем при непрерывно изменяющихся воздействиях.
![]() Связь между частотными характеристиками замкнутой автоматической системы и показателями качества переходных процессов оценивается с использованием преобразования Фурье. Оно позволяет получить на основании дифференциальных уравнений с учетом начальных условий и приложенных воздействий некоторые функции, которые называются обобщенными частотными характеристиками.
Связь между частотными характеристиками замкнутой автоматической системы и показателями качества переходных процессов оценивается с использованием преобразования Фурье. Оно позволяет получить на основании дифференциальных уравнений с учетом начальных условий и приложенных воздействий некоторые функции, которые называются обобщенными частотными характеристиками.
Можно показать, что изменение обобщенной координаты или регулируемой величины х (t) для широкого класса внешних воздействий
При единичном ступенчатом воздействии и нулевых начальных условиях получим переходные характеристики замкнутой автоматической системы:
В некоторых случаях h (t) можно вычислить по номограммам типовых процессов.
![]() Распределение нулей и полюсов имеет большое влияние на качество переходного процесса, который может быть описан характеристическим уравнением:
Распределение нулей и полюсов имеет большое влияние на качество переходного процесса, который может быть описан характеристическим уравнением:
где li , ji - корни характеристического уравнения.
Из этого уравнения следует, что корни и нули характеристического уравнения определяют поведение автоматической системы в переходном процессе. Из решения характеристического уравнения получаем, что чем дальше корни этого уравнения находятся слева от мнимой оси, тем быстрее заканчиваются переходные процессы в автоматической системе. При приближении автоматической системы к границе устойчивости корни характеристического уравнения перемещаются на комплексной плоскости по направлению к мнимой оси.
На границе устойчивости один вещественный корень или два комплексно-сопряженных выходят на мнимую ось, а при дальнейшем переходе автоматической системы в неустойчивое состояние они перемещаются в правую полуплоскость. Т. о. одним из показателей качества работы автоматических систем является степень удаления корней характеристического уравнения замкнутой автоматической системы, лежащих в левой полуплоскости, от мнимой оси.
![]() Допустим, что выходной сигнал в любой момент времени точно копирует входной. Тогда передаточная функция замкнутой автоматической системы W(p) = 1, и соответствующая амплитудная частотная и фазовая частотная характеристики также равны единице. Другими словами, на всех частотах вынужденных колебаний амплитуда выходного сигнала равна амплитуде входного, а сдвиг по фазе между ними равен нулю.
Допустим, что выходной сигнал в любой момент времени точно копирует входной. Тогда передаточная функция замкнутой автоматической системы W(p) = 1, и соответствующая амплитудная частотная и фазовая частотная характеристики также равны единице. Другими словами, на всех частотах вынужденных колебаний амплитуда выходного сигнала равна амплитуде входного, а сдвиг по фазе между ними равен нулю.
Однако эти условия могут выполняться лишь в идеальном случае, если все звенья автоматической системы безинерционны. Поэтому ввиду инерционности автоматической системы, которая отражается постоянными времени ее звеньев, указанные условия выполняются на небольшом участке низких частот 0 < w < w1. При дальнейшем увеличении частоты автоматическая система вследствие своей инерционности не успевает реагировать на колебания больших частот. Следовательно выходной сигнал отстает по фазе от входного.
Установлено, что чем больше значение амплитудной частотной характеристики, тем более колебательным является переходный процесс. Отношение максимальной амплитуды при частоте w к амплитуде при нулевой частоте, называется показателем колебательности. Обычно это значение М = 1,2 ... 1,5 При малых значениях М система имеет большое время регулирования, а при больших М увеличивается перерегулирование и автоматическая система приближается к границе устойчивости.
При анализе и синтезе автоматических систем часто используют логарифмические амплитудные частотные характеристики (ЛАЧХ) разомкнутых автоматических систем. Как нам уже известно, по этим характеристикам судят об устойчивости системы. Однако, что еще важнее, по ним можно судить о качестве переходных процессов и качестве регулирования. Более того, если для исследования устойчивости необходимо располагать двумя характеристиками - амплитудной и фазовой, то о качестве регулирования можно судить только по одной амплитудной характеристике.
Расчетами было установлено, что для удовлетворительного качества регулирования участок средних частот (w2 < w <w3) ЛАЧХ должен иметь наклон - 20 дБ/дек. Приемлемое качество переходных процессов имеет место, если протяженность этого участка примерно равна декаде.
Типовая логарифмическая амплитудная частотная характеристика
В частности, с увеличением наклона ЛАЧХ уменьшается колебательность переходного процесса. Время переходного процесса зависит от частоты среза wС: чем больше частота среза, тем меньше время переходного процесса.
Интегральные оценки представляют собой определенный интеграл от некоторой переходной функции составляющей ошибки и дают возможность дать общую оценку скорости затухания, а также отклонения регулируемой величины в совокупности, без определения того и другого в отдельности. Обычно интегральные оценки применяют для астатических систем. В этих автоматических системах установившаяся ошибка при единичном задающем воздействии равна нулю, и переходная составляющая ошибки равная ошибке автоматической системы e (t) = x (t) - y (t)
Простейшей интегральной оценкой является интеграл
В устойчивой автоматической системе этот интеграл имеет конечную величину. Геометрически это будет площадь под кривой переходного процесса, построенная для отклонения регулируемой величины. Площадь будет тем меньше, чем быстрее затухает переходный процесс и чем меньше величина отклонения. Поэтому параметры автоматической системы рекомендуется выбирать таким образом, чтобы добиваться минимума этой интегральной оценки.
Неудобством интегральной оценки является то, что она годится только для монотонных процессов, когда не меняется знак отклонения х. Если же имеет место колебательный процесс, то при вычислении интеграла площади будут складываться алгебраически и минимум этого интеграла может соответствовать колебаниям с малым затуханием или вообще без затухания Так как форма переходного процесса при расчете автоматических систем может быть неизвестна, то практически использовать интегральную оценку нецелесообразно.
Переходная функция и ошибка при монотонном и колебательном переходных процессах
В этом случае применяют следующую интегральную оценку
![]()
Вычисление этого интеграла в большинстве случаев вызывает существенные затруднения.
Учитывая сказанное целесообразно перейти к квадратичной интегральной оценке как монотонных, так и колебательных переходных процессов, которая иногда называется "квадратичной площадью регулирования"
которая не зависит от знака ошибки, а значит, и от характера кривой переходного процесса. Величина J будет тем меньше, чем меньше сумма заштрихованных площадей, т. е. чем лучше переходный процесс приближается к идеальному скачку регулируемой величины вслед за скачком задающего или возмущающего воздействия. Часто в литературе такую оценку качества называют квадратичной динамической ошибкой регулирования.
В результате стремления приблизить переходный процесс к идеальному получается большая скорость изменения регулируемой величины при приближении к установившемуся значению, что вызывает большое перерегулирование.
Квадратичную интегральную оценку можно улучшить, если учитывать не только ошибку регулирования, но и скорость ее изменения. Такой интеграл имеет вид
Находят применение и более сложные интегральные оценки, учитывающие не только ошибку и ее первую производную, но и производные более высоких порядков. При любых интегральных оценках качество переходного процесса будет тем лучше, чем меньше величина соответствующего интеграла.
Общим недостатком интегральных оценок качества переходных процессов является то, здесь ничем не ограничивается форма кривой переходного процесса. Оказывается что при совершенно различных по форме переходных процесса, имеют одно и то же значение квадратичной интегральной оценки. Часто оказывается, что выбранные по минимуму этой оценки параметры автоматической системы соответствуют слишком колебательному процессу, ибо отмечавшиеся уже при этом стремление приблизить процесс к идеальному скачку вызывает большую скорость изменения координат при подходе к установившемуся значению. Это получается вследствие того что интегральная оценка учитывает только величину отклонения и скорость затухания и никак не учитывает близость автоматической системы к границе устойчивости.
Чувствительность автоматических систем. Действительные значения параметров автоматической системы практически всегда отличаются от расчетных. Это может вызываться неточностью изготовления отдельных элементов, изменением параметров в процессе хранения и эксплуатации, изменением внешних условий и т. п.
Изменение параметров может привести к изменению статических и динамических свойств автоматической системы. Это обстоятельство желательно учесть заранее в процессе проектирования и настройки автоматической системы.
Степень влияния изменения отдельных параметров на различные характеристики автоматической системы оцениваются посредством чувствительности.
Чувствительностью называется некоторый показатель, характеризующий свойство автоматической системы изменять режим работы при отклонении того или иного . |
В качестве оценки чувствительности используются так называемые функции чувствительности, представляющие собой частные производные отдельных координат автоматической системы по вариации определяющего параметра.
Функции чувствительности временных характеристик. Посредством этих функций оценивается влияние малых отклонений параметров автоматической системы от расчетных значений на временные характеристики автоматической системы в целом.
При определении функции чувствительности различают следующие понятия:
- исходная система - это автоматическая система, у которой все параметры равны расчетным значениям и не имеют вариаций. Этой системе соответствует так называемое основное движение;
- варьированная система - такая автоматическая система, у которой произошли вариации параметров. Движение ее называется варьированным движением.
