Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1. Введение в микропроцессорные системы
· Введение в структурно-функциональную организацию МПС
· Основные компоненты микропроцессорной системы и их характеристики
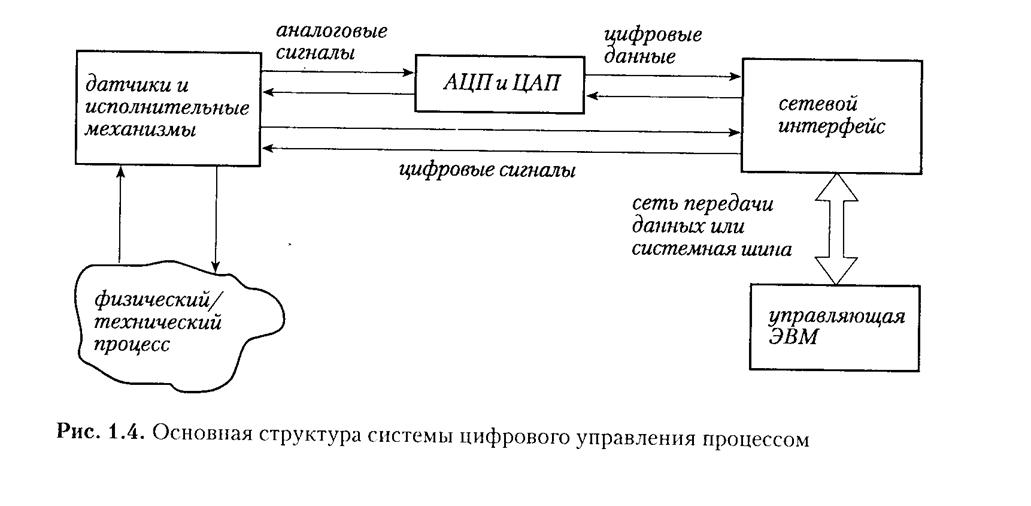
· Введение в управление процессами
· Введение в проектирование МПС
1.1. Введение в структурно-функциональную организацию МПС
Микропроцессорная система – система, основным обрабатывающим узлом которой является микропроцессор (МП) или микроконтроллер (МК). Основными структурообразующими элементами МПС являются сами МП/МК и системные интерфейсы. Используются следующие основные типы архитектуры МПС:
· однопроцессорные безмагистральные (кассовый аппарат на основе МК, электроизмерительный прибор на основе МК, …)
· однопроцессорные на основе общей магистрали (унифицированные МПС системы управления с наращиваемой памятью и развитой периферией, ...
· однопроцессорные на основе системы магистралей (магистраль основной памяти, магистраль быстродействующего видеоконтроллера, …)
· многопроцессорные однородные (управление системой объектов в условиях, когда функциональная сложность алгоритмов управления и требования к быстродействию для различных объектов отличаются не очень сильно)
· многопроцессорные неоднородные (для различных задач контроля и управления, решаемых в МПС характерны существенно различающиеся требования по быстродействию и функциональным возможностям архитектуры МП/МК)
Р1.1. Cистема регистрации аналоговых данных: АЦП/ЦАП – аналогово-цифровые и цифроаналоговые преобразователи, КАК - коммутатор аналоговых каналов, БЗУ – буферное ЗУ, АЦПУ-алфавитно-цифровое печатающее устройство, ВД – выносной дисплей, ТТ-телетайп. |
Р1.2. Измерительный прибор: а) на дискретных компонентах; б) на основе МП. УС-усилитель, БАОС - блок аналоговой обработки сигналов, БФД - блок формирования данных, БИ - блок индикации, БУВВ - блок управления вводом-выводом, ИУВВ - интерфейсное УВВ, БЛУ - блок логического управления; ПУ – пульт управления, БУ – блок управления, АЗУ – аналоговое ЗУ. |
Р1.3. Измерительное устройство на базе микроконтроллера(МК): Di – датчик; Пi – преобразователь сигнала; |
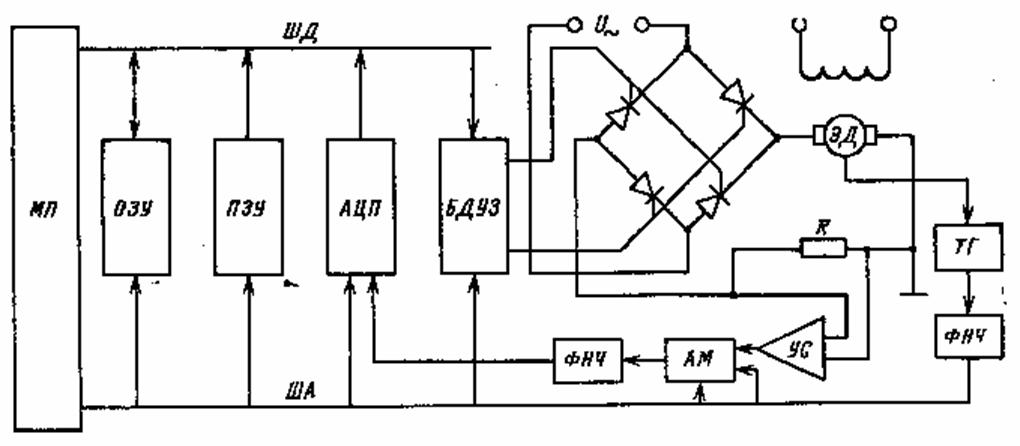
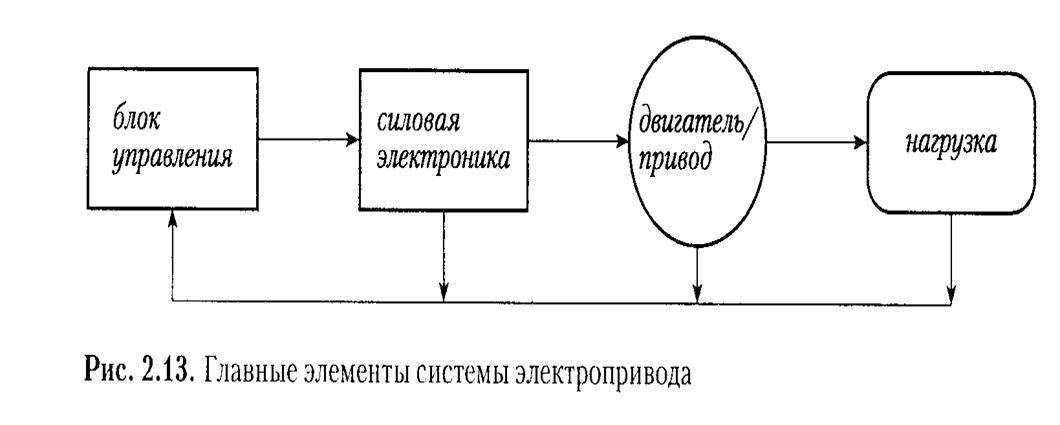
Р1.4. Система регулирования скорости электродвигателя (ЭД): ТГ – тахогенератор; ФНЧ - фильтр низкой частоты; УС – усилитель; АМ – аналоговый мультиплексор; БДУЗ – блок дискретно-управляемых временных задержек. Скорость регулируется изменением напряжения на выходе тиристорного выпрямителя. Управление выходным напряжением выпрямителя производится изменением фазы напряжения на управляющих входах тиристоров. |
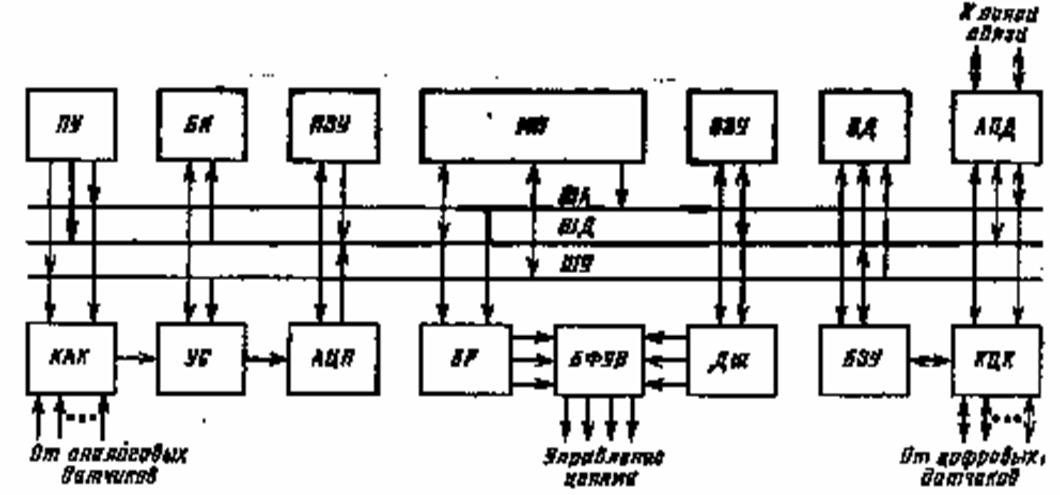
Р1.5. Обобщенная архитектура системы контроля параметров технологического процесса. ПУ - пульт управления; БИ - блок индикации; ВД - выносной дисплей; АПД - аппаратура передачи данных; КАК/КЦК - коммутаторы аналоговых/цифровых каналов; БЗУ - буферная память; Дш - дешифратор управляющих воздействий; БР - блок регистрации; БФУВ - блок формирования управляющих воздействий. |
Р1.6. Система управления прокатным станом: ДП – датчик положения горячего металла, ДУ – датчик положения нажимных винтов и усилий на них, ДС – датчик скорости прокатки, ДТ – датчик температуры металла, ПУ – пульт управления, КД – коммутатор сигналов датчиков. |
Р1.7. Система медицинской диагностики: ЭКГ – электрокардиограмма, ИУВВ – интерфейсные УВВ, Д – дисплей, ПУ – пульт управления, БИ – блок индикации. |
Р.1.8 Распределенная информационно-управляющая система: ИФС – интерфейсные схемы, АП/ЦП – аналоговые и цифровые приборы, ИМ – исполнительные механизмы, КУВВ – коммутатор УВВ. |

1.2. Основные компоненты МПС и их характеристики
Однокристальный микропроцессор – содержит АЛУ, регистры, средства сопряжения с шинами адреса, данных, управления, средства организации прерываний, режима ПДП.
Многокристальный микропроцессор с фиксированной разрядностью – разбиение на кристаллы в связи с невозможностью разместить всю функциональность в одной микросхеме.
Многокристальный разрядно-модульный МП – основу составляет процессорная секция.
Микроконтроллер – отличается от МП наличием внутренней памяти, нескольких параллельных портов и возможно последовательных,
Примеры:
Однокристальный МП Intel 8085
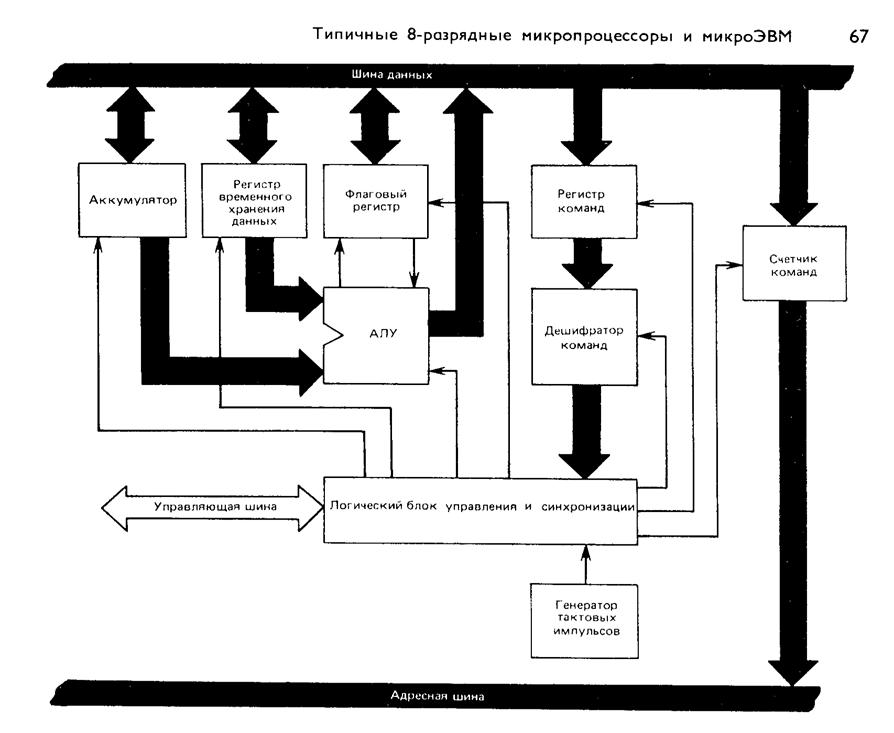
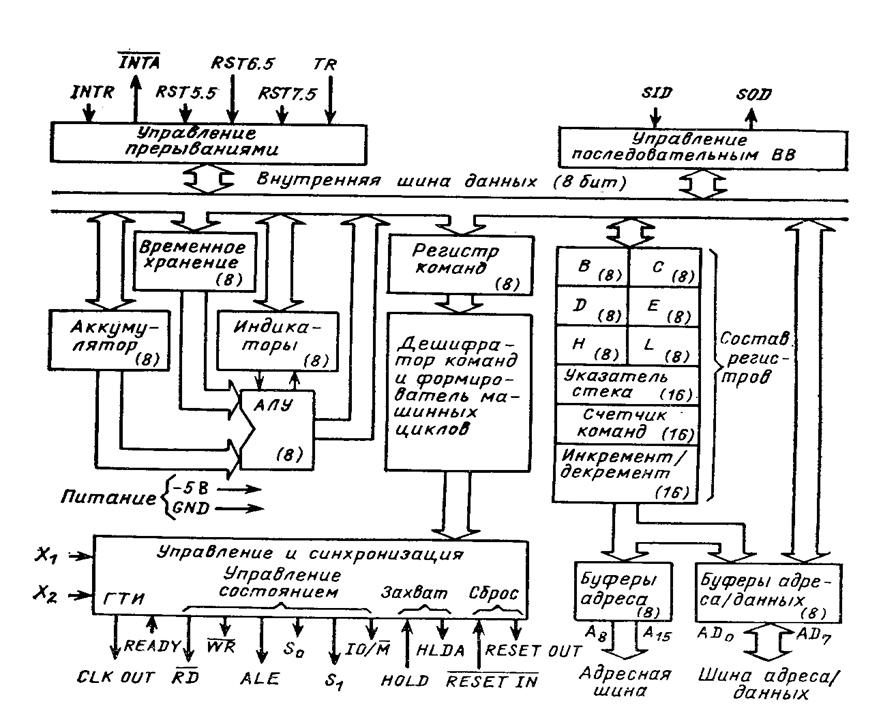
Программно-доступные компоненты
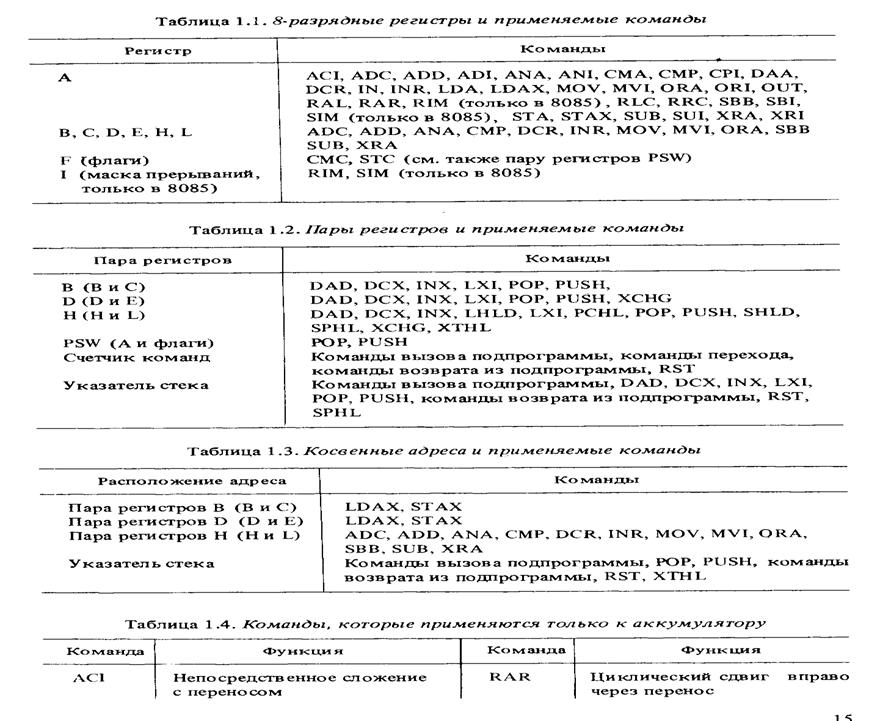
8-разрядные регистры A,B,C,D,E,H,L
16-разрядные регистровые пары B_C, D_E, H_L и SP
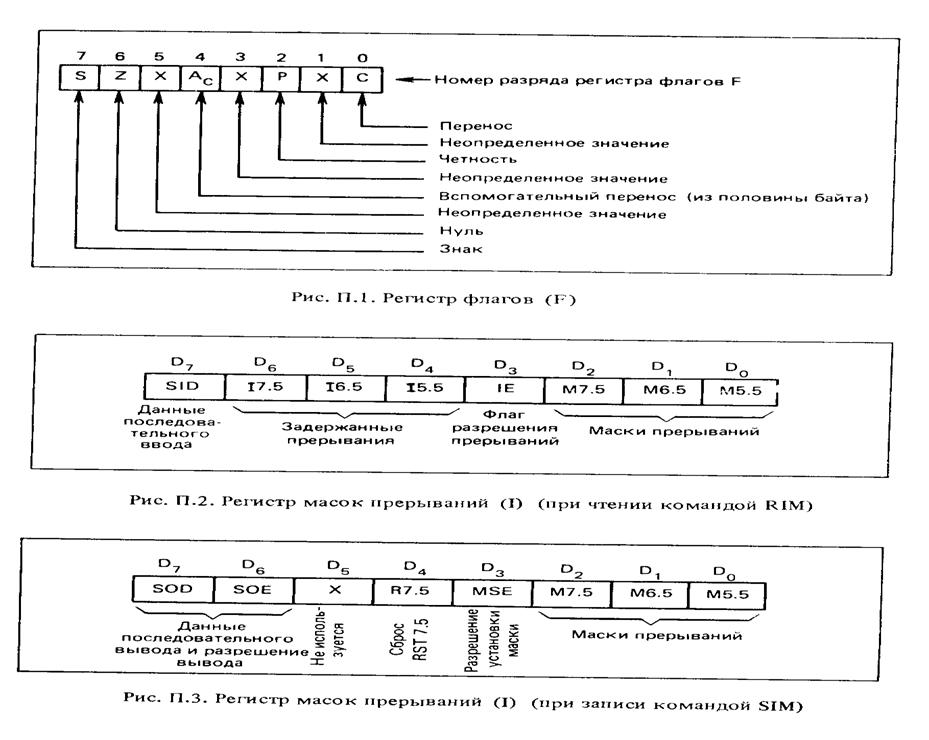
Регистр флагов
Регистр маски прерываний
Память 64 Кбайт:
Адресуется PC, HL, B_C, D_E, SP и через абсолютную адресацию.
Способы адресации и форматы команд
Регистровая:
a) 3-битный номер 8-разрядного регистра:
B:000, C:001, D:010, E:011, H:100, L:101, A:111 – подавляющее большинство операций пересылки и обработки;
б) 2-битный номер регистровой пары или указателя стека:
B_C:00, D_E:01, H_L:10, SP:11 - пересылка, сложение, инкремент, декремент.
Косвенно-регистровая:
а) через H_L - M:110 – подавляющее большинство операций пересылки и обработки;
б) через B_C, D_E, SP – пересылка.
Непосредственная: КОП константа
a) byte - подавляющее большинство операций пересылки и обработки;
б) word – загрузка пары регистров (LXI word)
Абсолютная: КОП адрес
Стековая: PUSH rp, POP rp, XTHL, организация подпрограмм и прерываний.
Основные форматы команд:
01DDDSSS MOV d, s – пересылка из s8 в d8 (reg-reg, reg-mem, mem-reg)
01DDD110 byte MVI d, byte – пересылка байта в d (reg=const, mem=const)
10CCCSSS логические и арифметические операции на s и аккумулятором
00DDD10C инкремент/декремент байта d
CCRRCCCC адресация регистровой пары или памяти через пару
CCCCCCCC одноместные операции с аккумулятором,
управляющие команды, …
CCCCCCCC byte двухместные операции аккумулятор-константа
CCCCCCCC word вызовы ПП, условные и безусловные переходы, команды с абсолютной адресацией и загрузка пары регистров LXI
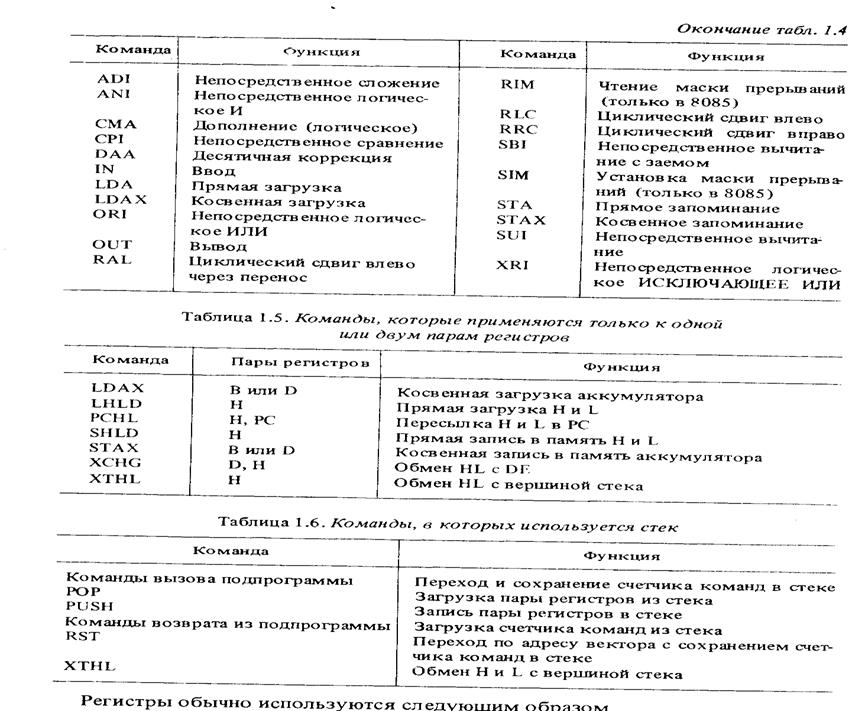
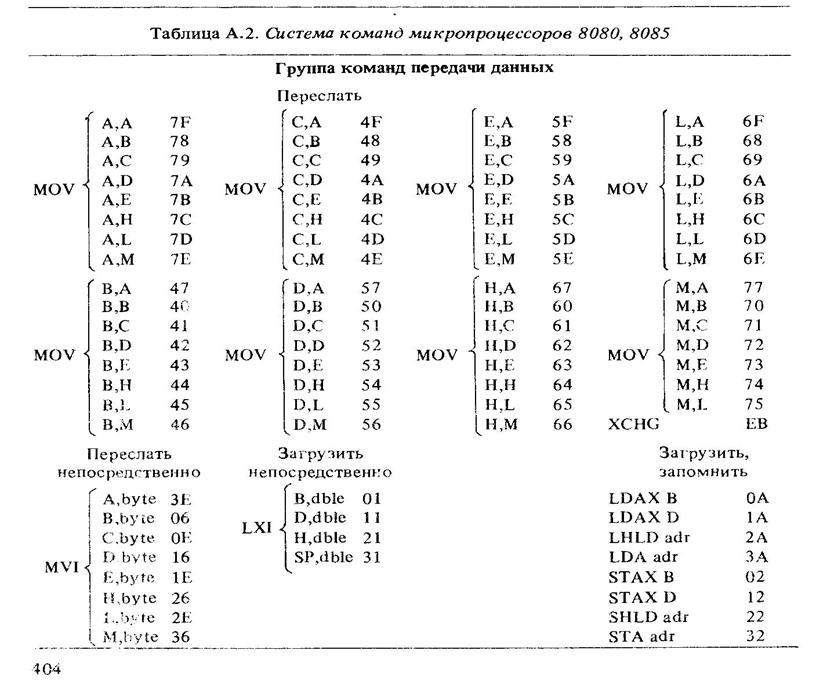
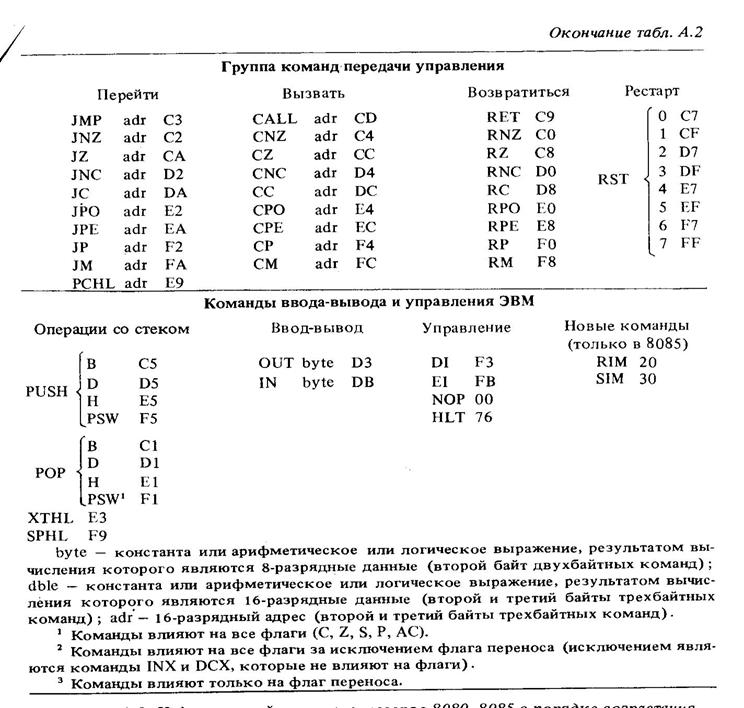
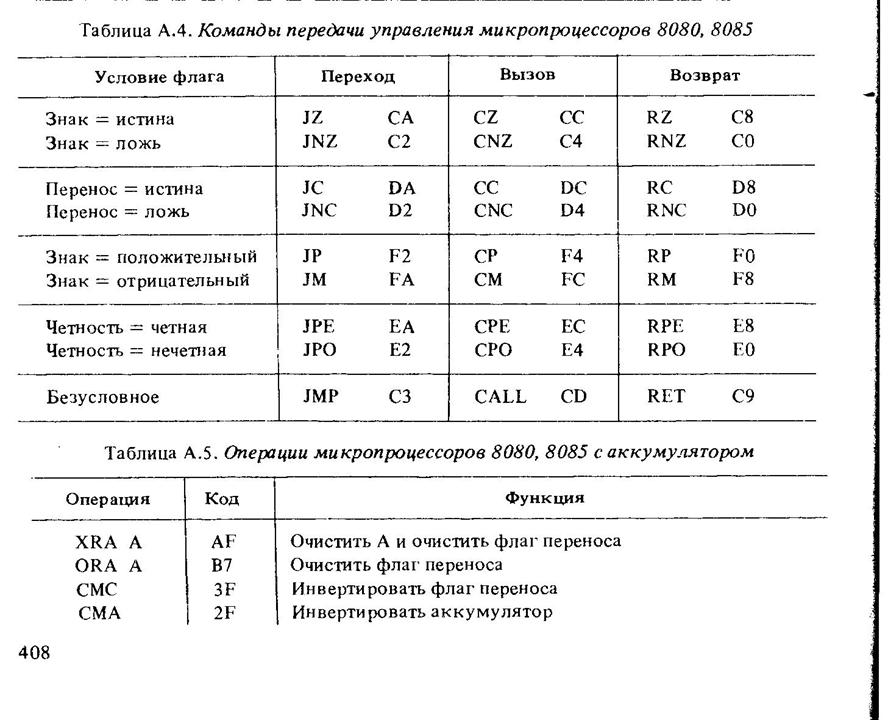
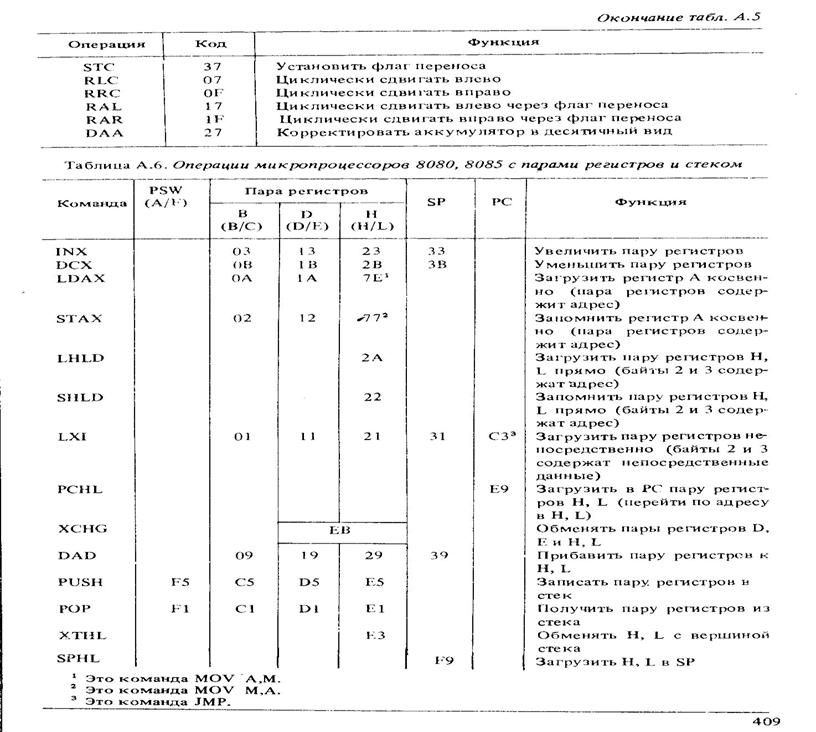
Система команд микропроцессора 8080/8085
Команда Название Действие//Влияние на флаги |
Команды пересылки |
MOV M, REG Пересылка reg=>mem m(HL) = reg |
MOV REG, M Пересылка mem=>reg reg = m(HL) |
MOV REG1,REG2 Пересылка reg=>reg reg1 = reg2 |
MVI M, D8 Пересылка const=>mem m(HL) = d8 |
MVI REG, D8 Пересылка const=>reg reg = d8 |
LDA ADDR Загрузка А (абсолютн.) A = m(addr) |
STA ADDR Сохранение А (абсолютн.) m(addr) = A |
LDAX RP Загрузка А (косв.:B/D) A = m(rp) |
STAX RP Сохранение А (косв.:B/D) m(rp) = A |
LHLD ADDR Загрузка HL (абсолютн.) HL = m(addr) |
SHLD ADDR Сохранение HL (абсолютн.) m(addr) = HL |
LXI RP, D16 Загрузка HL константой rp = d16 |
PUSH RP Сохранение RP в стеке SP = SP-2, m(SP) = rp |
POP RP Восстановление RP из стека rp = m(SP), SP = SP+2 |
SPHL Загрузка SP из HL SP = HL |
XCHG Перестановка HL и DE HL ó DE |
XTHL Перестан. HL и верш. стека m(SP) ó HL |
IN PORT Ввод из порта PORT A = port(d8) |
OUT PORT Вывод в порт PORT port(d8) = A |
Арифметическая обработка |
ADD M Сложение А с mem A = A + m(HL) //Все флаги |
ADD REG Сложение A с reg A = A + reg //Все флаги |
ADC M Сложение A с mem и CY A = A + m(HL) + CY //Все флаги |
ADC REG Сложение A с reg и CY A = A + reg + CY //Все флаги |
ADI D8 Сложение A с const A = A + D8 //Все флаги |
ACI D8 Сложение A с const и CY A = A + D8 + CY //Все флаги |
SUB M Вычитание mem из A A = A - m(HL) //Все флаги |
SUB REG Вычитание reg из A A = A - reg //Все флаги |
SBB M Вычитание mem и CY из A A = A - m(HL) - CY //Все флаги |
SBB REG Вычитание reg и CY из A A = A - reg - CY //Все флаги |
SUI D8 Вычитание const из A A = A - d8 //Все флаги |
SBI D8 Вычитание const и CY из A A = A - d8 + CY //Все |
CMP M Сравнение A – mem A – m(HL) //Все флаги |
CMP REG Сравнение A – reg A – reg //Все флаги |
CPI D8 Сравнение A – const A – d8 //Все флаги |
DAD RP Двухбайтовое сложение HL = HL + rp //CY |
INR M Инкремент mem m(HL) = m(HL)+1 //S, Z,P, AC |
INR REG Инкремент reg reg = reg + 1 //S, Z,P, AC |
INX RP Инкремент RP rp = rp + 1 |
DCR M Декремент mem m(HL) = m(HL)-1 //S, Z,P, AC |
DCR REG Декремент reg reg = reg–1 //S, Z,P, AC |
DCX RP Декремент RP rp = rp–1 |
DAA Десятичная коррекция Десят. Коррекция //Все |
Логическая обработка |
ANA M Логическое И A и mem A = A & m(HL) //S, Z,P, AC, CY=0 |
ANA REG Логическое И A и reg A = A & reg //S, Z,P, AC, CY=0 |
ANI D8 Логическое И A и const A = A & d8 //S, Z,P, AC, CY=0 |
ORA M Логическое ИЛИ A и mem A = m(HL) //S, Z,P, AC=CY=0 |
ORA REG Логическое ИЛИ A и reg A = A! reg //S, Z,P, AC=CY=0 |
ORI D8 Логическое ИЛИ A и const A = A! d8 //S, Z,P, AC=CY=0 |
XRA M Исключающее ИЛИ A и mem A = A ^ m(HL)//S, Z,P, AC=CY=0 |
XRA REG Исключающее ИЛИ A и reg A = A ^reg //S, Z,P, AC=CY=0 |
XRI D8 Исключающее ИЛИ A и const A = A ^d8 //S, Z,P, AC=CY=0 |
CMA Инвертирование А A = ~A |
Сдвиги |
RAL Цикл. сдвиг влево А. CY CY. A = A. CY, CY=A[7],AC=0 |
RAR Цикл. сдвиг вправо А. CY A. CY = CY. A, CY=A[0],AC=0 |
RLC Цикл. сдвиг влево А A=A[6..0].A[7],CY=A[7],AC=0 |
RRC Цикл. сдвиг вправо А A=A[0].A[7..1],CY=A[0],AC=0 |
Переходы и вызовы подпрограмм |
PCHL Переход по HL PC = HL |
JMP LABEL Безусловный переход goto addr |
JC LABEL Переход по переносу if CY goto addr |
JNC LABEL Переход по CY=0 if ~CY goto addr |
JZ LABEL Переход по нулю if Z goto addr |
JNZ LABEL Переход по не нулю if ~Z goto addr |
JM LABEL Переход по минусу if S goto addr |
JP LABEL Переход по плюсу if ~S goto addr |
JPE LABEL Переход по четности if P goto addr |
JPO LABEL Переход по нечетности if ~P goto addr |
CALL LABEL Вызов подпрограммы PUSH(PC), PC=addr |
CC LABEL Условный вызов ПП при CY=1 if CY вызов ПП |
CNC LABEL Условный вызов ПП при CY=0 if ~CY вызов ПП |
CZ LABEL Условный вызов ПП при Z=1 if Z вызов ПП |
CNZ LABEL Условный вызов ПП при Z=0 if ~Z вызов ПП |
CM LABEL Условный вызов ПП при S=1 if S вызов ПП |
CP LABEL Условный вызов ПП при S=0 if ~S вызов ПП |
CPE LABEL Условный вызов ПП при P=1 if P вызов ПП |
CPO LABEL Условный вызов ПП при P=0 if ~P вызов ПП |
RET Возврат из подпрограммы PC = POP() |
RC Возврат из ПП при CY=1 if CY возвр из ПП |
RNC Возврат из ПП при CY=0 if ~CY возвр из ПП |
RZ Возврат из ПП при Z=1 if Z возвр из ПП |
RNZ Возврат из ПП при Z=0 if ~Z возвр из ПП |
RM Возврат из ПП при S=1 if S возвр из ПП |
RP Возврат из ПП при S=0 if ~S возвр из ПП |
RPE Возврат из ПП при P=1 if P возвр из ПП |
RPO Возврат из ПП при P=0 if ~P возвр из ПП |
Управляющие и прочие команды |
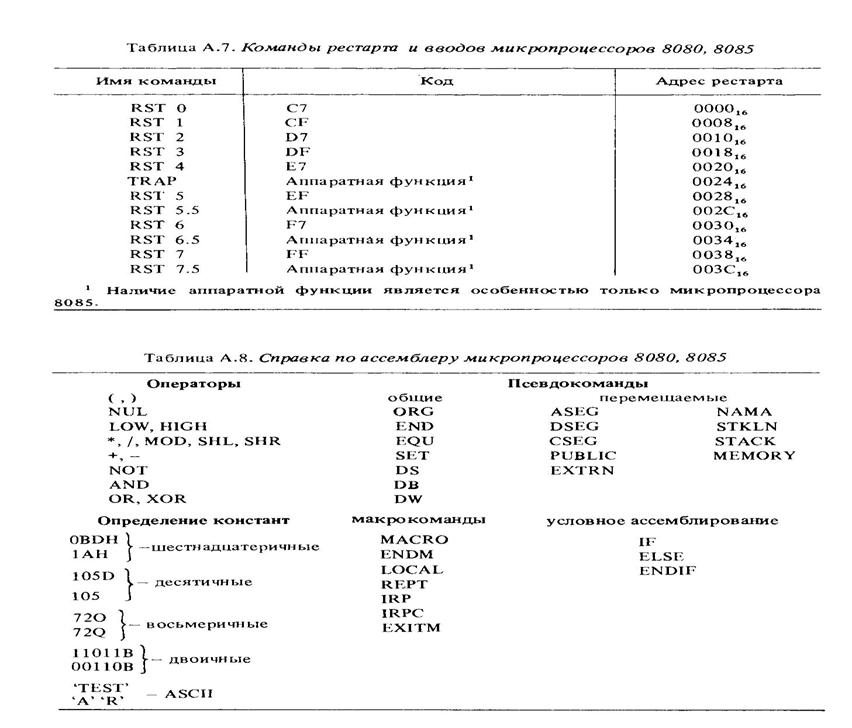
RST N Вход в прерывание N PUSH(PC), PC=8*N |
EI Разрешение прерываний РгМП[3]=1 |
DI Запрет прерываний РгМП[3]=0 |
RIM(8085A) Взять маску прерываний A = маска прерыв. |
SIM(8085A) Установка маски прерыв. Маска прерыв. = A |
STC Установка переноса CY = 1 CY = 1 |
CMC Инвертирование переноса CY = ~CY CY |
HLT Останов Останов |
NOP Нет операции Нет операции |
Условные обозначения:
REG – регистр(A, B,C, D,E, H,L); reg – содержимое регистра; RP- пара регистров (B: BC , H: HL , D: DE , SP);
D8, D16 – соответственно байт или слово данных; m(HL) – содержимое ячейки памяти, адресуемой парой регистров H и L; LABEL - метка; PORT - номер порта ввода-вывода; addr, ADDR – абсолютный шестнадцатиразрядный адрес памяти;
Операции: ó - перестановка,& - поразрядное И, ! - поразрядное
ИЛИ, ^ - иключающее ИЛИ, ~ - поразрядная инверсия
8085A – только в МП I8085A

1.3. Введение в управление процессами


1.4. Введение в процесс проектирования МПС