
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 681.51
Н. И. САМШОРИН [1]
(, Электросталь)
СИНТЕЗ РЕГУЛЯТОРОВ ПРИ ПАРАМЕТрИЧЕСКОЙ НЕОПРЕДЕЛЕННОСТИ И ВНЕШНИХ ВОЗМУЩЕНИЯХ НА ОСНОВЕ h∞- ПОДХОДА
Предлагается подход к синтезу регуляторов для линейных многомерных систем с параметрической неопределенностью, подверженных действию внешних возмущений, ограниченных по мощности, с учетом требований к точности системы по регулируемым переменным.
Решение задачи сводится к стандартной процедуре
H∞– оптимизации, а заданная точность достигается путем выбора весовой матрицы при регулируемых переменных.
Введение
Проблеме робастной стабилизации систем с отклонениями параметров от расчетных (номинальных) посвящено большое число исследований.
Обычно реальные динамические системы на практике подвержены действию неизмеряемых внешних возмущений, которые в математической теории управления ограничиваются по какой-либо норме. Однако, учет внешних возмущений в таких задачах обычно связан с уравнениями состояния. Поэтому, в настоящей работе внешние возмущения учитываются в исходных уравнениях динамической системы в физических переменных.
Развиваемый здесь подход опирается на представление динамической системы в так называемой канонической (W, Λ, K) - форме [3], где физические параметры, подверженные отклонениям от расчетных, образуют внутренние обратные связи в объекте в виде диагональной матрицы Λ .
В качестве неизмеряемых внешних возмущений рассматриваются полигармонические (с неизвестными амплитудами и частотами), которые ограничены по мощности (т. е. ограничена сумма квадратов амплитуд каждой полигармонической составляющей соответствующей координаты внешнего возмущения). Здесь, аналогично [1], вводится понятие радиуса установившегося состояния динамической системы по регулируемым переменным и регулятор, помимо робастной устойчивости [3], должен обеспечивать заданный или минимизируемый радиус.
В работе показано, что такая задача сводится к стандартной проблеме парирования внешних возмущений H∞ – подхода [1,3] путем специального выбора весовой матрицы при регулируемых переменных объекта.
1. Постановка задачи
Рассмотрим объект управления, описываемый уравнениями в физических переменных [2]:
 (1)
(1)
где zf – l - мерный вектор физических переменных объекта (скорость, ускорение, ток, перемещение, угол поворота, и т. д.); u – m-мерный вектор управляющих воздействий; y – m2-мерный вектор измеряемых переменных объекта; wf – m3-мерный вектор внешних возмущений;
N – известная числовая матрица размером (m2´ l); L1(p), L2(p), L3(p) – полиномиальные матрицы размеров (l ´ l), ( l´ m), (l ´ m3) соответственно, оператора дифференцирования p = d/dt.
 ,
,  ,
,  (2)
(2)
где ![]() – известные вещественные матрицы соответствующих размеров,
– известные вещественные матрицы соответствующих размеров,  .
.
Элементы матриц ![]() далее будем называть физическими параметрами объекта управления. Пусть n физических параметров объекта с номинальными значениями l1, l2, …,ln могут принимать значения из заданных интервалов
далее будем называть физическими параметрами объекта управления. Пусть n физических параметров объекта с номинальными значениями l1, l2, …,ln могут принимать значения из заданных интервалов
![]() i =
i = ![]() , (3)
, (3)
где Dli – отклонение параметра от расчетного.
Компоненты вектора внешних возмущений wf представляют собой ограниченные полигармонические функции, вида:
![]() ,
, ![]() (4)
(4)
Здесь амплитуды ![]() , начальные фазы
, начальные фазы ![]() (
(![]() ,
,  ), а также частоты
), а также частоты ![]() (
( ) гармоник неизвестны, однако известно, что амплитуды гармоник подчинены условию
) гармоник неизвестны, однако известно, что амплитуды гармоник подчинены условию
 ,
, ![]() , (5)
, (5)
где р – известное число гармоник, ![]() (
(![]() ) – заданные числа.
) – заданные числа.
Определим установившиеся ошибки по регулируемым переменным соотношением [1]
![]()
![]() .
.
Обычно требуют найти такой стабилизирующий регулятор по выходу, чтобы выполнялись неравенства (инженерные требования к точности)
![]() ,
, ![]() ,
,
где ![]() ,
, ![]() – заданные числа.
– заданные числа.
Однако ясно, что такого регулятора может не существовать, поэтому определим радиус установившегося состояния замкнутой системы по регулируемым переменным, соотношением [1]
 (6)
(6)
на который и будем накладывать ограничения.
Задача 1. Построить стабилизирующий регулятор по выходу
![]() (7)
(7)
(К(р) – правильная передаточная функция регулятора) такой, чтобы, с одной стороны, при заданных конечных отклонениях параметров l1, l2, …,ln от расчетных (3) замкнутая система (1),(7) сохраняла асимптотическую устойчивость, и выполнялось условие
![]() (8)
(8)
где g – заданное или минимизируемое число.
Очевидно, что для разрешения поставленной задачи мы должны предположить, что стабилизируемость и детектируемость объекта (1) не нарушается, когда его параметры принимают значения из интервалов (3).
2. Каноническая (W,L, K) – форма
Решение задачи синтеза опирается на уравнения замкнутой системы (1), (7) записанные в канонической (W, L,K) – форме [3]. Эти уравнения с учетом внешних возмущений имеют вид:
![]()
![]() (9)
(9)
где Wij(s) (i=1,2, j=1…3) – известные передаточные матрицы, не содержащие варьируемых параметров (2); u, y – физический вход и выход объекта управления (1); ![]() – n – мерные фиктивные вход и выход объекта управления; Λ = diag[l1, l2, …,ln ] - диагональная матрица параметров объекта управления, подверженных отклонениям от расчетных; K(р) – искомая передаточная матрица регулятора (7).
– n – мерные фиктивные вход и выход объекта управления; Λ = diag[l1, l2, …,ln ] - диагональная матрица параметров объекта управления, подверженных отклонениям от расчетных; K(р) – искомая передаточная матрица регулятора (7).
Структурная схема (W, L,K) – формы, соответствующая уравнениям (9) приведена на рис.1.
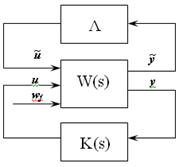
Рис.1. Структурная схема (W, L,K) - формы системы с внешним возмущением
3. Сведение задачи к стандартной проблеме Н¥ оптимизации
Рассмотрим замкнутую систему, представленную на рис. 2
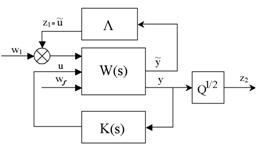
Рис.2. Структурная схема замкнутой системы (1),(7)
Она описывается следующими уравнениями
![]()
![]()
![]() (10)
(10)
где дополнительно к рис. 1: wf ÎRm3 – вектор внешних возмущений, действующих на объект; w1 Î Rn – вектор фиктивных внешних возмущений; z1 Î Rn – вектор фиктивных регулируемых переменных; z2 Î Rm2 – взвешенный вектор регулируемых переменных с помощью диагональной матрицы
Q = diag[q1, q2, …qm2] с положительными элементами qi > 0 (![]() ).
).
Введем расширенный вектор внешних возмущений w, включающий вектор фиктивных внешних возмущений w1 и вектор реально действующих на объект внешних возмущений wf и расширенный вектор регулируемых переменных z, объединяющий векторы z1 и z2. Тогда передаточную матрицу замкнутой системы, связывающую эти векторы, обозначим через Tzw :
 (11)
(11)
Пусть искомый регулятор К(p) разрешает задачу минимизации Н¥ нормы передаточной матрицы замкнутой системы:
 . (12)
. (12)
Тогда каждый из блоков этой матрицы удовлетворяет аналогичному условию, в частности
![]() (13)
(13)
Второе из неравенств (14) также может быть представлено в эквивалентной частотной форме
 (14)
(14)
откуда, учитывая диагональную структуру матрицы Q, получим следующее неравенство для установившихся значений регулируемых переменных [1]
![]() (15)
(15)
где ![]() – евклидова норма вектора w* с компонентами правой части (5). Тогда, выбирая элементы весовой матрицы Q из неравенства
– евклидова норма вектора w* с компонентами правой части (5). Тогда, выбирая элементы весовой матрицы Q из неравенства
 (16)
(16)
придем к выполнению целевого условия (8).
В работе доказано, что при выполнении первого частотного неравенства из (13) замкнутая система будет сохранять устойчивость, когда возмущенные физические параметры ![]() принадлежат интервалам:
принадлежат интервалам:
![]() ,
, ![]() (17)
(17)
где g - значение параметра в H¥ задаче (13), реализовавшееся в результате синтеза.
Таким образом, если задача (12) решена (с весовыми коэффициентами (16)), то выполнено целевое условие (8), которое определяет точностные характеристики замкнутой системы, а значение параметра g, дает в силу (17) достаточные оценки на интервалы возможных значений параметров гарантирующие робастную устойчивость системы (1),(7).
4. Пример
Эффективность данного метода проиллюстрирована на примере решения «Benchmark» - задачи из [3,4].
Проиллюстрируем предложенный метод синтеза на примере двухмассовой системы с упругой связью: двух тележек, соединенных пружиной. Модель описывается уравнениями:
где q – варьируемый параметр (жесткость пружины), номинальное значение которого равно 0,8; x1 – перемещение первой тележки;
x2 - перемещение 2-ой тележки; u – управляющее воздействие, вырабатываемое регулятором; wf – внешнее возмущение, выводящее систему из положения равновесия.
Измеряемой переменной является
![]() .
.
Для решения задачи синтеза на основе стандартной процедуры Н∞ оптимизации структурную схему рис.2 и соответствующие уравнения представим в пространстве состояний:
где
 ,
,  ,
,  ,
,
 ,
, ![]() ,
,
![]() .
.
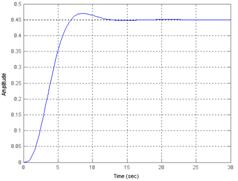
Допустим, что установившаяся ошибка по регулируемой переменной не должна превышать y* = 0,7, а внешним возмущением, выводящим систему из положения равновесия является единичная ступенька, т. е. w* = 1. Тогда в соответствие с (16) получим значение весового коэффициента при регулируемой переменной y на структурной схеме рис.2 Q = 2.
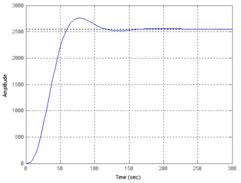
В работе, с целью сравнения результатов, был осуществлен синтез регуляторов без учета внешнего возмущения [3] и с его учетом. На рис.3а показана реакция замкнутой системы с первым регулятором, где wf = 1(t). На рис. 3б показан переходный процесс в системе, регулятор которой построен по предлагаемой технологии
а) б)
Рис.3. Реакция замкнутой системы на единичное ступенчатое воздействие
а) без учета внешнего возмущения
б) с учетом внешнего возмущения
Очевидно, что установившаяся ошибка во втором случае более чем на 3 порядка меньше. Это подчеркивает эффективность предложенного подхода к обеспечению заданной точности. Помимо этого было проведено исследование допусков на варьируемый параметр q с номинальным значением 0,8. При этом гарантируемые границы методом синтеза были найдены по формулам (17), а истинные на основе специфического применения критерия Найквиста к системе Рис.1, разомкнутой по переменной ![]() (параметру q, как в [3]).
(параметру q, как в [3]).
Результаты такого анализа сведены в следующую таблицу:
Т а б л и ц а 1
Результаты анализа замкнутой системы
Без учета внешнего возмущения | С учетом внешнего возмущения (Q=2) | |
γsubopt= 1,1087 | Значение параметра γ | γsubopt= 1,1891 |
0,0784 < q < 1,5216 | Гарантируемые границы робастной устойчивости по параметру q | 0,1272 < q < 1,4728 |
0,051 < qist < 2,92 | Истинные границы робастной устойчивости по параметру q | 0,073 < qist < 2,901 |
L=0,65дБ φз=5,74° | Запасы при размыкании системы по входу/выходу объекта | L=11,2дБ φз=55° |
В последней строке таблицы приведены значения запасов устойчивости по модулю L и фазе φз , которые определяются при размыкании замкнутой системы по переменной u (физическому входу объекта) или у (физическому выходу объекта). Здесь надо отметить весьма низкие запасы устойчивости, если регулятор строится без учета внешнего возмущения, хотя границы на варьируемый параметр весьма широки.
Заключение
В докладе было представлено решение задачи робастной стабилизации при
параметрической неопределенности с учетом действия внешних возмущений
при синтезе регулятора. При этом в отличии от известных результатов в данной работе рассматриваются уравнения движения объекта в физических переменных, в которых каждый коэффициент уравнения, подверженный отклонениям от номинального имеет ясный физический смысл.
Отметим также, что представленные результаты допускают обобщение на случай, когда необходимо обеспечить робастную степень устойчивости системы, определяющую заданное время регулирования.
Литература
1. Г. Синтез многомерных систем заданной точности II. Применение процедур H∞-оптимизации // А. Г. Александров, В. Н. Честнов. - Автоматика и телемеханика, № 8, 1998. С. 124–138.
2. Воронов , управляемость, наблюдаемость. - М.: Наука, 19с.
3. Честнов робастных регуляторов многомерных систем при параметрической неопределенности на основе круговых частотных неравенств // Автоматика и телемеханика. № 3, 1999. С. 229-238.
4. Haddad W. M., Collins E. G., Bernstein D. S. Robust stability analysis using the small gain, circl, positivity and Popov theorems: A comparative study // IEEE Trans. Contr. Systems Technology. 1993. V. 1. No. 4. P. 290–293.
Текст доклада согласован с научным руководителем.
Научный руководитель: д. т.н., проф. , ИПУ РАН, Москва.
 15.05.2013г.
15.05.2013г.
Научный руководитель д. т.н., проф.
