

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА АВТОМАТИКИ
Расчетно-графическая работа
по дисциплине «Основы теории управления»
Факультет: АВТФ
Группа: АМ-610 Преподаватель:
Студент: Мордвинов А. А.
Вариант: 4
Новосибирск, 2008
Содержание:
Цель работы.... 3
Вариант задания... 3
Математическая модель объекта управления... 4
Построение математической модели объекта управления в виде системы дифференциальных уравнений... 4
Математическая модель объекта после преобразования Лапласа.. 6
Вывод передаточной функции системы.... 7
Синтез устройства управления... 9
Алгебраический метод синтеза.. 12
Проверка на устойчивость.. 17
Проверка на устойчивость по критерию Найквиста.. 17
Проверка на устойчивость по критерию Гурвица.. 18
Вывод... 19
Список использованной литературы.... 20
Цель работы
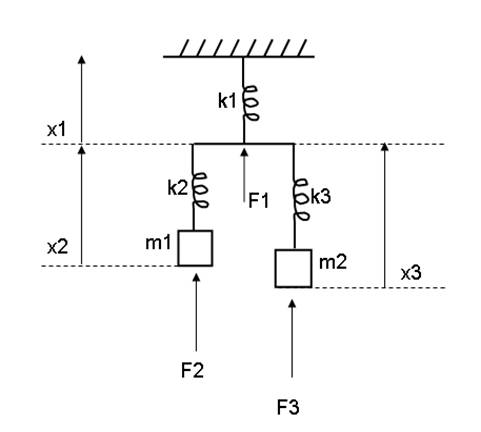
· Построение и исследование математической модели системы из двух грузов (материальных точек) с массами m1 и m2, подвешенных на пружинах таким образом, как показано на рисунке (Рис.1).
· Синтез регулятора для исследуемой системы по ЛАЧХ и исследование системы с регулятором.
· Проверка устойчивости системы с помощью Гурвица и Найквиста.
Вариант задания
 Выход – x1
Выход – x1
Управление – F1
Необходимо помощью силы F1 необходимо уравновесить x1
Рис.1 Объект управления - Система из двух грузов на трех пружинах.
Математическая модель объекта управления
Модель представлена на Рис.1. Пусть демпфирование отсутствует. Опишем переменные, которые изображены на Рис.1:
- m1, m2 – массы 2-х заданных грузов (материальных точек); k1, k2, k3 – коэффициенты упругости для 3-х заданных пружин; x1, x2, x3 – координаты грузов, проходящих параллельно системы из 2-х грузов и пружин; F1, F2, F3 – мгновенные управляющие воздействия (силы с направлениями, указанными векторами) на каждый из грузов, приводящие систему в движение.
Построение математической модели объекта управления в виде системы дифференциальных уравнений
Для выяснения поведения системы из 3-х пружин и 2-х материальных точек с массами после приложения внешних сил сначала рассмотрим поведение системы из 1-ой пружины с подвешенной к ней материальной точкой массой m (Рис.2).
Рис.2. Система из пружины и материальной точки с массой m.
После воздействия внешней силы F = m*a (где a = x``), математическая точка начинает совершать колебательные движения в сопротивляющейся среде под влиянием упругой силы пружины, действующей по закону Гука:
В виде уравнения закон Гука записывается в следующей форме:
F = –k*x
где F — сила упругого сопротивления пружины, x — линейное растяжение или сжатие, а k — так называемый коэффициент упругости. Чем выше k, тем жестче пружина и тем тяжелее она поддается растяжению или сжатию. Знак минус в формуле указывает на то, что струна противодействует деформации: при растяжении стремится укоротиться, а при сжатии — распрямиться.
Запишем уравнение системы по второму закону Ньютона:
![]()
![]() (1)
(1)
Рассмотрим систему из груза (m1) и двух пружинок (k1,k2). При приложении к грузу своей силы F2, добавляется воздействие, которое происходит через пружины, соединяющий груз и вершину модели. Следовательно, запишем:
![]() ,
,
Рассмотрим систему из груза (m2) и двух пружинок (k1,k3). При приложении к грузу своей силы F3, добавляется воздействие, которое происходит через пружины, соединяющий груз и вершину модели:
![]() ,
,
При рассмотрении системы из двух грузов и трёх пружинок (Рис. 1), при воздействии на каждый груз своей силы, система уравнений выглядит следующим образом:
![]()
![]() ,
,
(2)
![]() .
.
Запишем, уравнение в точке соединения трех пружин, которое не является дифференциальным уравнением:
 , где
, где 
Тогда после подстановки, найдем ![]() :
:
![]()
![]()
![]()
![]() ;
;
Математическая модель объекта после преобразования Лапласа
Перейдем от дифференциальных уравнений к линейным уравнениям при помощи преобразований Лапласа:
![]()
 ,
,
 , (3)
, (3)
![]()
![]() ,
,
![]() , (4)
, (4)
Выполним преобразования:
![]()
![]()



![]()
![]()
(4’)

В пакете МatLab, составим структурную схему исследуемой системы согласно (4’):
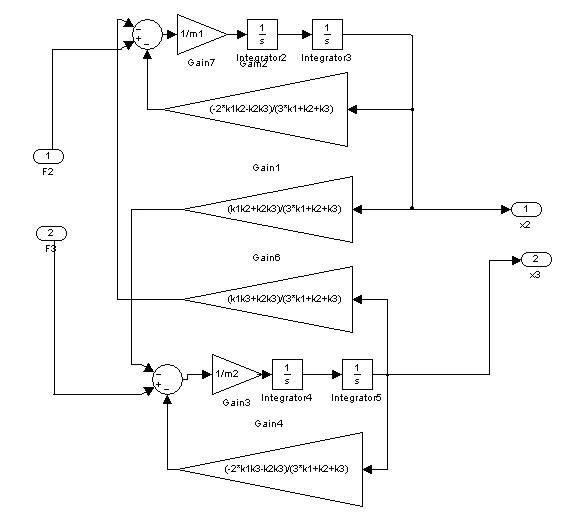
Рис.3. Структурная схема всей нескорректированной системы
Вывод передаточной функции системы
Для дальнейшего решения зададимся значениями коэффициентов упругости для пружин и массами грузов. Примем, что переменные имеют единичные значения:
k1 = k2 = k3 = 1,
m1 = m2 = 1,
Подставив эти значения в (4), получим следующую систему уравнений:
![]()
![]() (5)
(5)
Согласно заданию мы имеем, в упрощённом представлении, следующую модель исследуемой системы. Силы F1, F3 равны нулю, и выходом системы служит координата х2.
Рис.4. Упрощённое представление исследуемой системы
Построим структурную схему объекта управления:
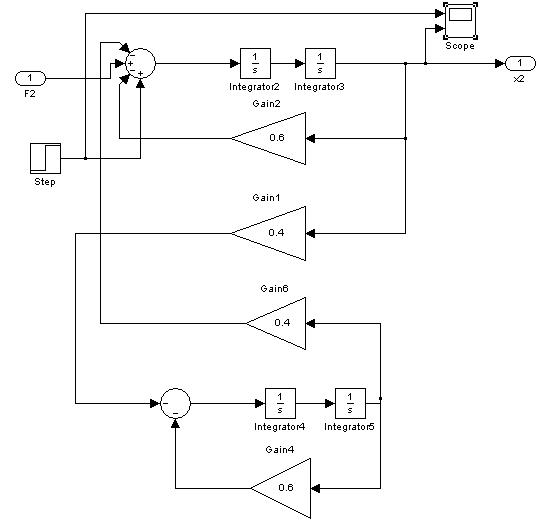
Рис.5. Структурная схема исследуемой нескорректированной системы
Рис.6. Вход нескорректированной разомкнутой системы
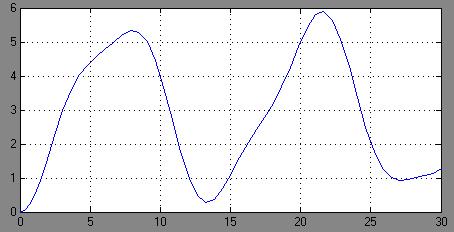
Рис.7. Выход нескорректированной разомкнутой системы
Для корректировки системы разработаем УУ методом по ЛАЧХ.
Синтез устройства управления
Найдём передаточную функцию исследуемого объекта:
[A, B,C, D]=linmod('R3');
sys=tf(ss(A, B,C, D))
Transfer function:
s^2 + 0.6
-------
s^e-017 s^3 + 1.2 s^e-017 s + 0.2
Так как коэффициенты при ![]() и
и ![]() очень малы, мы примем их равными 0.
очень малы, мы примем их равными 0.
Тогда передаточная функция примет вид:
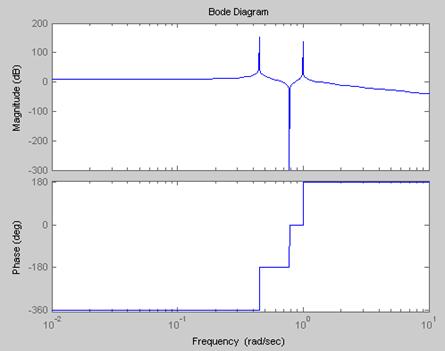
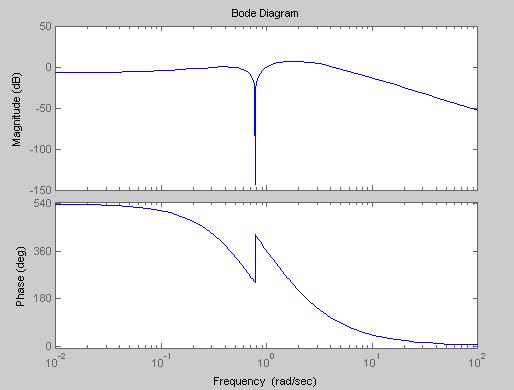
Мы нашли передаточную функцию разомкнутой системы. Построим ЛАЧХ и ФЧХ для неё.
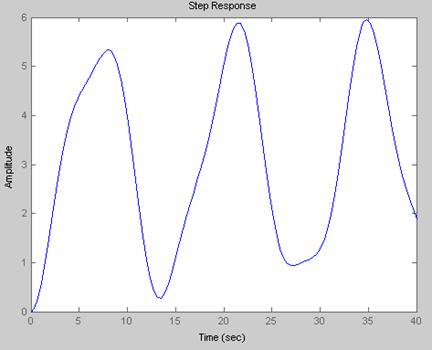
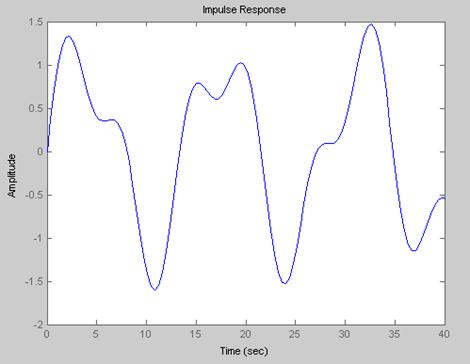
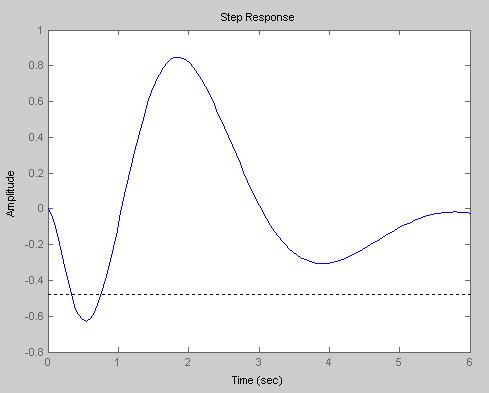
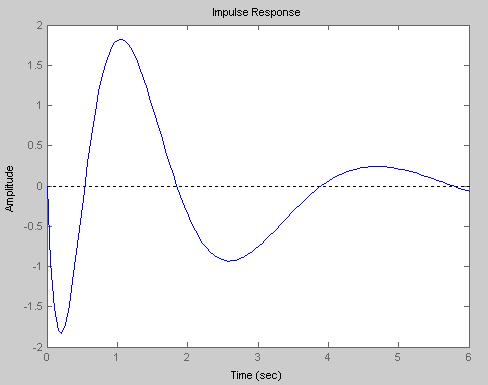
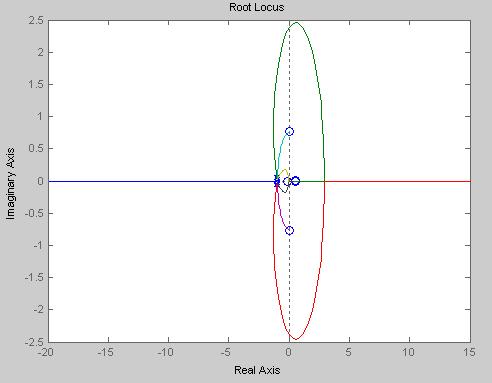
Переходные процессы в системе без регулятора
bode(sys)
step (sys)
impulse(sys)
rlocus(sys. num{1},sys. den{1})(корневой портрет)
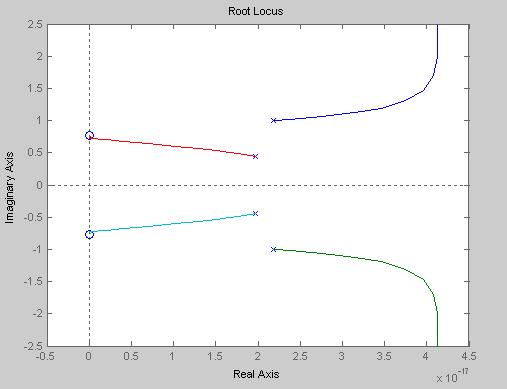
Мы не видим возможности применить метод синтеза УУ по ЛАЧХ.
Применим алгебраический метод синтеза.
Алгебраический метод синтеза
Рис.8. Замкнутая скорректированная система с УУ.
Поскольку мы имеем передаточную функцию системы 4 степени, то разработаем регулятор со степенью на 1 меньше, то есть 3 степени:
Произведём расчет регулятора с помощью корней ХПЗС скорректированной системы.
Найдём ХПЗС скорректированной системы (Рис.8):

То есть ХПЗС имеет вид: ![]()
Произведём подстановку в ХПЗС всех чисел и переменных, обозначив дробные коэффициенты в B(s) через а1.
![]()
Раскроем скобки:

Необходимо, чтобы система была устойчива, поэтому корни ХПЗС должны лежать в левой полуплоскости. Приведем многочлен к виду ![]() , у которого все корни равны –1, т. е. лежат в левой полуплоскости. С помощью MathCad было получено выражение:
, у которого все корни равны –1, т. е. лежат в левой полуплоскости. С помощью MathCad было получено выражение:
![]()
Воспользуемся MatLab'ом для нахождения значений y3,y2,y1,y0,x3,x2,x1,x0: (см. файл F3.M):
A=[
0
0
0 1 0
0 0 1
6 0
0.6 ];
B=[7 1];
B=B';
X=inv(A)*B
Результаты:
X =
1.0000
7.0000
42.2000
7.4000
-22.4000
19.2000
-2.4000
-0.8000
Мы получили следующий регулятор:

Построим структурную схему с устройством управления:
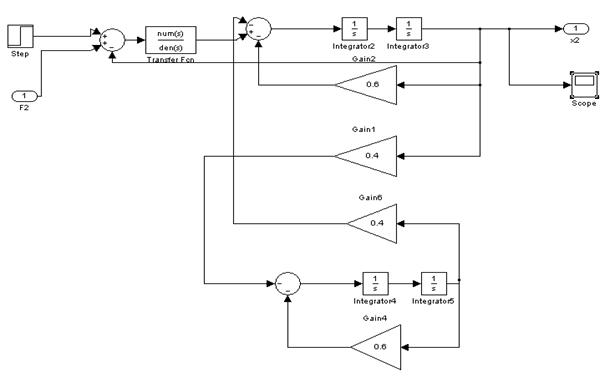
Рис.9. Структурная схема замкнутой скорректированной системы
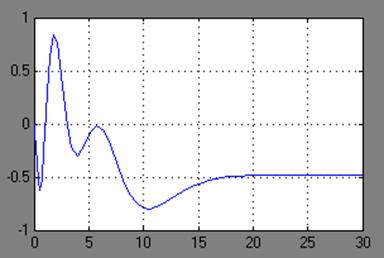
Рис.10. График сигнала на выходе скорректированной замкнутой системы
Мы видим, что УУ приводит систему к устойчивому состоянию приблизительно за 14 временных интервалов, это видно из графика сигнала на выходе скорректированной замкнутой системы (Рис.10). Синтез УУ завершён успешно.
Переходные процессы в системе c регулятором
bode(sys)
step (sys)
impulse(sys)
rlocus(sys. num{1},sys. den{1})(корневой портрет)
Проверка на устойчивость
Проверка на устойчивость по критерию Найквиста
Формулировка критерия Найквиста: для устойчивости замкнутой системы необходимо и достаточно, чтобы амплитудно-фазовая характеристика устойчивой разомкнутой системы при изменении w от 0 до бесконечности не охватывала точку с координатами [-1;j0]
Объект:
Регулятор:
Устойчивая разомкнутая система:
Wраз=WpWo

Теперь с помощью Matlab:
A=tf([-210],[.48])
nyquist(A)
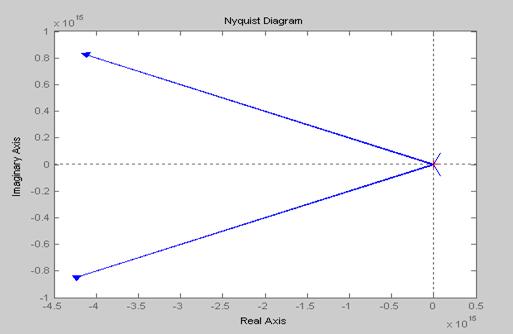
Вывод: График не охватывает точку [-1;j0] значит, устойчива замкнутая система.
Проверка на устойчивость по критерию Гурвица
Характеристическое уравнение:
![]()
Все коэффициенты характеристического уравнения положительны – значит, выполняется необходимое условия устойчивости по критерию Гурвица
Если произведение крайних меньше произведения средних, значит, выполняется достаточное условие по критерию Гурвицу и система будет устойчива.
1.48*1<7*8.44 выполняется
7*8.44<43.4*10.28 выполняется
43.4*10.18<15.8*50.84 выполняется
Вывод: все условия выполнились, значит, система устойчива.
Вывод
В РГР был успешно произведён алгебраический синтез УУ для системы из двух грузов, подвешенных на пружинах (Рис.1). Устройство управления имеет передаточную функцию  и приводит систему к устойчивому состоянию.
и приводит систему к устойчивому состоянию.
Список использованной литературы
1. Лекции по ОТУ; 2008 год.
2. Теория автоматического регулирования; , .
