
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 681.51
Б. И. АДАМОВ[1]
(Национальный исследовательский университет «МЭИ», Москва)
СТАБИЛИЗАЦИЯ ДВИЖЕНИЯ СИГВЕЯ С ПАРАМЕТРИЧЕСКОЙ НЕОПРЕДЕЛЁННОСТЬЮ И Повышение комфортабельности езды пассажира
В работе рассматривается задача синтеза системы управления сигвеем с существенной параметрической неопределённостью, обусловленной неизвестностью массы и габаритов пассажира. Получен закон управления, обеспечивающий не только стабилизацию движения системы, но и повышение комфортабельности езды.
Введение
Двухколёсные транспортные средства такие, как Segway, PUMA и др. находят всё большее применение в повседневной жизни. Задачи стабилизации движения таких механических систем рассматриваются в [2], как с точки зрения синтеза закона управления, так и с точки зрения оценки области притяжения по переменным состояния при ограниченных по величине управляющих воздействиях. Однако эти результаты получены в условиях полной параметрической определённости объектов управления. В случае стабилизации движения сигвея, необходимо учитывать, что параметры пассажира известны неточно и могут лежать в широких пределах.
Специфика рассматриваемой задачи позволяет без привлечения специального аппарата теорий адаптивного и робастного управления разработать регулятор, функционирующий в условиях существенной параметрической неопределённости.
В работе уделено внимание обеспечению комфортабельности езды пассажира. Это может привести к повышению конкурентоспособности проектируемого транспортного средства как рыночного товара.
Постановка задачи
Сигвей представлен как система абсолютно твёрдых тел (см. рис. 1), состоящая из платформы 3 с пассажиром (считаются одним телом) и соосных колёс 1 и 2 радиуса ![]() , которые двигаются по горизонтальной плоскости без отрыва и проскальзывания. Управляющими воздействиями являются моменты, развиваемые независимыми электроприводами колёс. В качестве обобщенных координат системы выбраны:
, которые двигаются по горизонтальной плоскости без отрыва и проскальзывания. Управляющими воздействиями являются моменты, развиваемые независимыми электроприводами колёс. В качестве обобщенных координат системы выбраны: ![]() – абсцисса и ордината точки
– абсцисса и ордината точки ![]() , лежащей на середине оси колёсной пары;
, лежащей на середине оси колёсной пары; ![]() – угол курса платформы;
– угол курса платформы; ![]() – угол отклонения пассажира от вертикали;
– угол отклонения пассажира от вертикали; ![]() – абсолютные углы поворота колёс. Через
– абсолютные углы поворота колёс. Через ![]() обозначено расстояние от оси колёсной пары до центра масс
обозначено расстояние от оси колёсной пары до центра масс ![]() платформы с пассажиром,
платформы с пассажиром, ![]() – их общая масса,
– их общая масса, ![]() – радиус инерции относительно оси
– радиус инерции относительно оси ![]() (см. рис. 1). Параметры
(см. рис. 1). Параметры ![]() неизвестны и могут лежать в широких пределах:
неизвестны и могут лежать в широких пределах:
![]()
Массами колёс и подвижных частей приводов пренебрегаем.
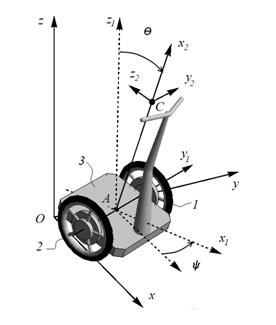
Рис. 1. Расчётная схема сигвея
Требуется обеспечить устойчивое равномерное прямолинейное движение пассажира, занимающего вертикальное положение.
В окрестности программного движения полная система уравнений динамики сигвея в псевдоскоростях 

 распадается на уравнения поперечных, и продольных движений [1].
распадается на уравнения поперечных, и продольных движений [1].
Малые продольные движения описываются следующими уравнениями [2]:
 (1)
(1)
где ![]() – скорость точки
– скорость точки ![]() ,
, ![]() – суммарный управляющий момент электроприводов колёс;
– суммарный управляющий момент электроприводов колёс; ![]() ,
,  ,
,  . Отметим неустойчивость тривиального решения системы (1).
. Отметим неустойчивость тривиального решения системы (1).
Требуется построить регулятор, стабилизирующий программное движение системы и обеспечивающий комфортабельное протекание переходных процессов. В качестве критерия комфортабельности езды пассажира выберем интегральный квадратичный функционал от абсолютной величины ускорения центра масс платформы с пассажиром:
 (2)
(2)
Искомый закон управления должен быть работоспособным при всех допустимых значениях параметров модели.
Основные результаты
С точностью до слагаемых третьего порядка малости квадрат ускорения центра масс платформы со стоящим на ней пассажиром равен:
![]()
что в силу уравнений (1) принимает вид:

Таким образом, вместо критерия качества (2) можно использовать эквивалентный ему функционал, не зависящий от старших производных переменных состояния:
 (3)
(3)
Структура уравнений движения позволяет получить решение задачи оптимального управления системой с критерием качества (2)-(3), рассматривая только первые два уравнения системы (1):
![]() (4)
(4)
Закон оптимальной обратной связи имеет вид
где симметричная положительно полуопределённая матрица ![]() удовлетворяет алгебраическому уравнению Риккати
удовлетворяет алгебраическому уравнению Риккати

В рассматриваемом случае
и оптимальный закон управления принимает вид:
 (5)
(5)
Отметим, что оптимальный закон обратной связи (5) является решением поставленной задачи для полной системы уравнений движения (1). Действительно, при стабилизации вертикального положения пассажира (![]() ) устанавливается постоянная скорость
) устанавливается постоянная скорость ![]() .
.
В условиях параметрической неопределённости модели сигвея преобразуем закон управления (5) к виду
![]() (6)
(6)
где ![]() ,
,  . Непосредственная проверка условий устойчивости системы (4) с регулятором (6) показывает его работоспособность при всех допустимых значениях параметров
. Непосредственная проверка условий устойчивости системы (4) с регулятором (6) показывает его работоспособность при всех допустимых значениях параметров  .
.
Результаты численного моделирования процессов в системе (1) с управлением (6) при различных значениях параметров ![]() и
и ![]() приведены на рис. 2. Здесь и далее сплошной линией обозначены графики зависимостей, отвечающих максимальным допустимым значениям параметров
приведены на рис. 2. Здесь и далее сплошной линией обозначены графики зависимостей, отвечающих максимальным допустимым значениям параметров ![]() . Отметим апериодический характер комфортабельного переходного процесса по углу
. Отметим апериодический характер комфортабельного переходного процесса по углу ![]() .
.
|
|
|
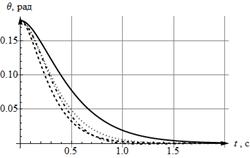
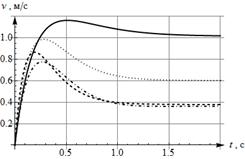
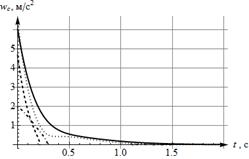
Рис. 2. Переходные процессы в системе управления сигвеем с законом управления (6) для угла наклона платформы с пассажиром ![]() , их скорости
, их скорости ![]() и ускорения центра масс
и ускорения центра масс ![]()
Для регулирования установившегося значения скорости пассажира в закон управления (6) необходимо ввести дополнительную обратную связь по переменной ![]() :
:
 (7)
(7)
где ![]() – желаемое значение скорости пассажира,
– желаемое значение скорости пассажира, ![]() – коэффициент дополнительной обратной связи. При
– коэффициент дополнительной обратной связи. При
гарантирована устойчивость процессов в системе управления при любых допустимых значениях параметров модели.
Результаты численного моделирования процессов в системе (1) с управлением (7) при различных значениях параметров ![]() и
и ![]() приведены на рис. 3. Здесь желаемое значение скорости пассажира равно нулю,
приведены на рис. 3. Здесь желаемое значение скорости пассажира равно нулю, ![]() . В этом случае качество переходных процессов по углу наклона пассажира
. В этом случае качество переходных процессов по углу наклона пассажира ![]() несколько ухудшается, а дополнительное регулирование скорости пассажира привносит относительно небольшое увеличение ускорения
несколько ухудшается, а дополнительное регулирование скорости пассажира привносит относительно небольшое увеличение ускорения ![]() .
.
|
|
|
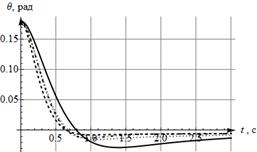
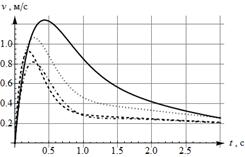
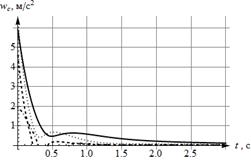
Рис. 3. Переходные процессы в системе управления сигвеем с законом управления (7) для угла наклона платформы с пассажиром ![]() , их скорости
, их скорости ![]() и ускорения центра масс
и ускорения центра масс ![]()
Заключение
Решена задача синтеза управления движением системы (1) с существенной параметрической неопределённостью. Структура стабилизирующего регулятора, обеспечивающего комфортабельное протекание переходных процессов, определена аналитически в рамках линейно-квадратичной теории. Коэффициенты обратной связи подобраны так, что обеспечивается работоспособность системы при всех допустимых значениях параметров. Предусмотрена возможность регулирования скорости пассажира.
ЛИТЕРАТУРА
1. Н. Управление пространственным движением перевернутого маятника, установленного на колесной паре // , Мартыненко . РАН. МТТ, 2006, №3, с. 25–42.
2. Мартыненко Ю. Г. Проблемы управления неустойчивыми системами // Мартыненко Ю. Г., Формальский А. М. «Успехи механики», Т.3, №2, апр. – июнь, 2005. С. 71 – 135.
Текст доклада согласован с научным руководителем.
Научный руководитель проф. каф. теоретической механики и мехатроники НИУ «МЭИ» д. ф.-м. н., проф.,

[1] Научный руководитель – (д. ф.-м. н., профессор, НИУ «МЭИ»)
