


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОУВПО «Самарский государственный архитектурно-строительный университет»
Факультет информационных систем и технологий
Кафедра прикладной математики и вычислительной техники
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ
по дисциплине
МЕТОДОЛОГИЯ НАУЧНЫХ ИССЛЕДОВАНИЙ
на тему
«Программный комплекс оптимизации и типизации многоцелевых технических систем с одномерной неопределенностью»
6 СЕМЕСТР 3 КУРС
Научный руководитель:
Проверили: | Выполнил: студент ГИП 106 Гресько Евгений |
Общая оценка _______________
Методический руководитель
2008 г.
Оглавление
Введение. 4
Модель простой многоцелевой системы.. 5
Математическая модель. 8
Алгоритм решения поставленной задачи. 9
Исследовательская часть. 10
Результаты.. 11
Библиографический список. 12
Введение
Характерной особенностью всех реальных задач принятия решений в технических и экономических социальных сферах является наличие неопределенностей, таких как: многообразие требуемых функций, расплывчатое прогнозирование экономических характеристик, спроса, масштабирование реализаций проектов и т. п.
Математически это находит отражение в следующем - в задаче присутствует множество значений параметров, которые в процессе ее решения необходимо выбрать оптимальным образом.
Помимо множества параметров присутствует еще одно множество-подмножество внешних факторов, которые оказывают влияние на эффективность решений, но не подвластны ЛПР (лицу, принимающему решение).
Как принимать решение в этих условиях рассматривают теория расплывчатых множеств и теория многоцелевых систем.
Модель простой многоцелевой системы
Ясно, что множество возможных решений, которым мы располагаем при оптимизации, является лишь частью мира, из которого выделен объект исследования. Поэтому если его "внутреннее устройство" характеризуется набором допустимых решений ![]() , то необходимо охарактеризовать и его взаимодействие с внешней средой с помощью набора внешних характеристик
, то необходимо охарактеризовать и его взаимодействие с внешней средой с помощью набора внешних характеристик ![]() . Так, если речь идет о какой-либо конструкции, то одной из внешних характеристик является температура среды, в которой конструкция будет работать; эта температура может изменяться в эксплуатационных пределах, например, от -40 градусов Цельсия до +50 градусов Цельсия и т. д. Таким образом, возможности оптимизации рассматриваемого объекта характеризуются допустимым множеством его возможных внутренних состояний – множеством допустимых решений
. Так, если речь идет о какой-либо конструкции, то одной из внешних характеристик является температура среды, в которой конструкция будет работать; эта температура может изменяться в эксплуатационных пределах, например, от -40 градусов Цельсия до +50 градусов Цельсия и т. д. Таким образом, возможности оптимизации рассматриваемого объекта характеризуются допустимым множеством его возможных внутренних состояний – множеством допустимых решений ![]() , а влияние внешней среды - внешним множеством
, а влияние внешней среды - внешним множеством ![]() , описывающим возможное изменение внешних характеристик объекта. С учетом сказанного, эффективность
, описывающим возможное изменение внешних характеристик объекта. С учетом сказанного, эффективность ![]() решения
решения ![]() зависит уже не только от самого решения, но и от внешних условий
зависит уже не только от самого решения, но и от внешних условий ![]() , в которых решение реализуется. Соответствующая характеристика является скалярной функцией
, в которых решение реализуется. Соответствующая характеристика является скалярной функцией  и называется функцией локальной эффективности (принято считать ее неотрицательной).
и называется функцией локальной эффективности (принято считать ее неотрицательной).
Подмножество внешнего множества, являющееся областью определения функции локальной эффективности при фиксированном элементе ![]() назовем областью достижимости этого элемента
назовем областью достижимости этого элемента ![]() . Будем полагать, что любой элемент внешнего множества попадает в область достижимости хотя бы одного допустимого решения, т. е.
. Будем полагать, что любой элемент внешнего множества попадает в область достижимости хотя бы одного допустимого решения, т. е.
В частном случае возможно  .
.
Аналогично, назовем областью доступности ![]() элемента
элемента ![]() множество допустимых решений, к областям достижимости которых он принадлежит. Из (-1) следует, что
множество допустимых решений, к областям достижимости которых он принадлежит. Из (-1) следует, что
 . (-2)
. (-2)
Также в частном случае возможно  .
.
Оба эти частных случая, очевидно, могут иметь место лишь одновременно. Такую систему будем называть полносвязанной и без особых упоминаний впредь считать, что речь идет о полносвязанных системах.
Ясно, что непосредственной оптимизацией функции локальной эффективности невозможно получить оптимальное решение ![]() , так как для различных внешних условий
, так как для различных внешних условий ![]() оно будет различно. Поэтому от функции локальной эффективности перейдем к критерию оптимальности
оно будет различно. Поэтому от функции локальной эффективности перейдем к критерию оптимальности ![]() многоцелевой системы одним из двух способов:
многоцелевой системы одним из двух способов:
1) гарантирующая многоцелевая система (ГМС)
 ;
;
2) интегральная многоцелевая система (ИМС)
 .
.
При первом способе за критерий принимается эффективность решения в самых неблагоприятных внешних условиях. Его целесообразно применять, например, при проектировании единичных или очень ответственных изделий. Во втором случае критерий соответствует среднему значению эффективности решения на всем диапазоне внешних условий. Его применяют при проектировании изделий, выпускаемых большими сериями и эксплуатируемых во всем диапазоне внешних условий. Если известна частота применения этих изделий в различных условиях, то она вводится как зависящий от x сомножитель в функцию локальной эффективности.
Наличие внешнего множества вносит в структуру многоцелевой системы еще одну важную особенность. Ясно, что чем шире это множество, тем больше отличается на его элементах оптимальное решение от того, которое было бы выбрано для каждого элемента в отдельности. С этой точки зрения, чем универсальнее проектируемый объект, тем ниже его эффективность. С данными явлениями можно бороться, принимая многоэлементные решения (стратегии) A = { yj }, j=1,..,m,  . Такое решение содержит m отдельных решений, между которыми "распределяются" элементы внешнего множества, так что для различных внешних условий реализуются те элементы многоэлементного решения, которые имеют для этих условий наибольшую эффективность (наименьшее значение функции локальной эффективности).
. Такое решение содержит m отдельных решений, между которыми "распределяются" элементы внешнего множества, так что для различных внешних условий реализуются те элементы многоэлементного решения, которые имеют для этих условий наибольшую эффективность (наименьшее значение функции локальной эффективности).
Распределение задается функцией E(x), которая сопоставляет каждому элементу внешнего множества ![]() номер того элемента многоэлементного решения, в "зону" которого x попадает. Сама же эта зона Ej называется областью Дирихле j-го элемента:
номер того элемента многоэлементного решения, в "зону" которого x попадает. Сама же эта зона Ej называется областью Дирихле j-го элемента:
Ej = {x ![]() X : E(x)=j}j=1,…,m.
X : E(x)=j}j=1,…,m.
Ясно, что локальная эффективность многоэлементного решения A из Y описывается минорантой
L(x, A) =  =
= ,
,
а критерий оптимальности равен:
для ГМС ![]()
![]() ,
,
для ИМС  =
=![]() при
при  ,
,
=![]() при
при ![]() .
.
Наиболее ярким примером многоцелевой системы являются типовые серии домов, сортаменты материалов, типоразмерные ряды станков и машин. Все эти системы многоэлементны, причем их многоэлементность вызвана именно широтой и многообразием условий применения.
Если частота появления различных проектных ситуаций заранее неизвестна, то следует разработать сортамент так, чтобы минимизировать максимальный возможный проигрыш в любой ситуации. Т. е. гарантировать, что, используя данный сортамент, мы в любом случае проиграем по весу конструктивного элемента не более (например, 7% по сравнению со специально спроектированным для данного случая элементом), причем всякий другой сортамент может привести к большим потерям. Тогда мы приходим к гарантирующей многоцелевой системе.
Численные методы оптимизации многоцелевых систем варьируются в зависимости от характера множеств X и Y, функции локальной эффективности и типа системы (ГМС или ИМС). Отметим, что, вообще говоря, оптимизацию многоцелевой системы можно свести к обычной задаче оптимизации. Однако при этом, в связи с увеличением размерности задачи, резко возрастает трудоемкость ее решения; кроме того, критерий оказывается весьма сложной многоэкстремальной функцией, для оптимизации которой большинство методов оптимизации непригодно.
Математическая модель
Для решения многоцелевой задачи пользователь задается функцией локальной эффективности, на основе которой строятся характеристические функции на основе следующих систем:
1) гарантирующая многоцелевая система (ГМС)
![]() ;
;
2) интегральная многоцелевая система (ИМС)
 .
.
В итоге характеристическая функция принимает вид:
Данные характеристические функции зависят от следующих параметров:
![]()
![]() - где a и b границы исследуемой области, а u и v области Дирихле.
- где a и b границы исследуемой области, а u и v области Дирихле.
На основе этих параметров получаем следующий график:
Для получения точного решения системы рассмотрим следующую модель:
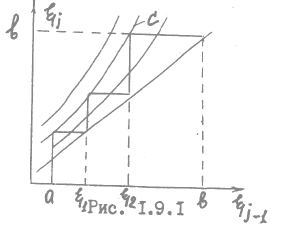
Любая система точек  может быть интерпретирована как совокупность областей Дирихле МС и показана ни рисунке 1 в виде лестницы с координатами вершин
может быть интерпретирована как совокупность областей Дирихле МС и показана ни рисунке 1 в виде лестницы с координатами вершин ![]() , началом на прямой ξ
, началом на прямой ξ![]() =a и концом на прямой ξ
=a и концом на прямой ξ![]() =b. В силу (1) значение критерия оптимальности соответствующей ГМС будет равно максимальной из значений характеристической функции МС в вершинах этой лестницы. Отсюда непосредственно следует условие оптимальности системы областей Дирихле: все вершины лестницы должны лежать на одной и той же линии уровня характеристической функции, т. е.
=b. В силу (1) значение критерия оптимальности соответствующей ГМС будет равно максимальной из значений характеристической функции МС в вершинах этой лестницы. Отсюда непосредственно следует условие оптимальности системы областей Дирихле: все вершины лестницы должны лежать на одной и той же линии уровня характеристической функции, т. е.
 (3)
(3)
Если задаться значением C, то из этого условия, решая каждый раз уравнение относительно ξj, можно последовательно найти ξ![]() (С),ξ
(С),ξ![]() (С),... и, наконец,
(С),... и, наконец, ![]() (c). Приравнивая его правой границе множества X, мы получаем уравнение относительно С:
(c). Приравнивая его правой границе множества X, мы получаем уравнение относительно С: ![]() (c)=b
(c)=b
Решив это уравнение, можно найти значение C оптимальное, а следом за ним, по (3), оптимальные значения границ областей Дирихле и компоненты элементов оптимальной стратегии ![]() .
.
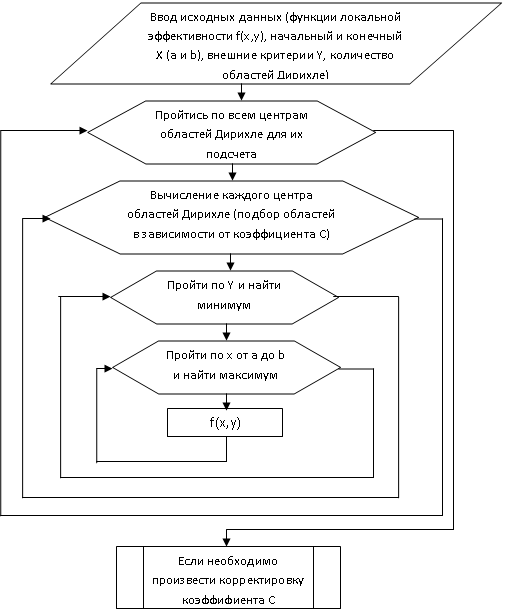 Алгоритм решения поставленной задачи
Алгоритм решения поставленной задачи
Исследовательская часть
Широкие возможности для приложения многоцелевого подхода представляют задачи размещения системы орбит центров обслуживания. Такими центрами могут быть аэродромы, предприятия перерабатывающей промышленности, региональные и другие пункты сбора информации и т. п.
В настоящее время успешно эксплуатируется ряд сетей ИСЗ (навигационных, связи и т. д.), в которых аппараты совместно функционируют для выполнения некоторой общей задачи. Рассмотрим сеть базовых ИСЗ, на которых размещаются аппараты, осуществляющие контроль диапазона обрит, т. е спасение, оказание технической помощи, ремонт различных объектов, находящихся на любых орбитах контролируемого диапазона. В связи с бурным развитием космических исследований подобные сети станут актуальными в ближайшем будущем. Эта задача (при ряде упрощающих допущений) может быть сформулирована следующим образом.
За внешнее множество Х примем соответствующую область в пространстве параметров контролируемых орбит, за множество стратегий Y – область параметров допустимых орбит размещения ИСЗ сети. Тогда стратегия A={yj}, j=1, ..., m будет характеризовать размещение всех спутников сети, а распределяющая функция E(x) определит сферу действия каждого из них. В качестве показателя эффективности примем максимальную характеристическую скорость перелета, необходимую для обеспечения перелета. С учетом того, что контролирующие аппараты снаряжаются стандартной топливной системой с фиксированным запасом топлива, этот показатель однозначно связан с общим весом проектируемой сети ИСЗ.
В простейшем случае контролируются круговые компланарные орбиты радиуса x∈X =[R0,Rm]; спутники сети такие размещаются на круговых орбитах y∈Y =[r0,rm], а показатель эффективности контроля орбиты x со спутника y определяется как характеристическая скорость двухимпульсного гомановского перелета

Где k - гравитационный параметр Земли. Тогда можно получить оптимальные характеристики сети. Оказывается, что для невысоких контролируемых орбит (H<=1000км) орбиты ИСЗ сети равномерно по высоте делят контролируемы диапазон; для более высоких орбит равномерность нарушается. (рис. 1)
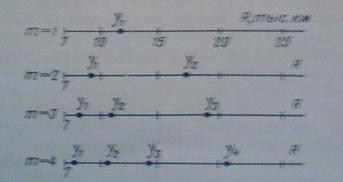
Рисунок1 – Оптимальные характеристики сети
Если допустить, что спутники сети могут располагаться на эллиптических орбитах. то множество стратегий Y станет двумерным: y=(p, c), где p- параметр, а с – эксцентриситет орбиты. Характеристическая скорость гомановского перелета отражается формулой
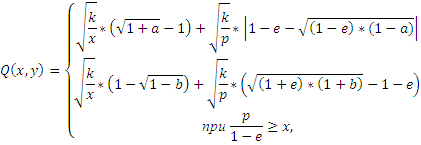
Где ;
; 
Можно показать, что для низких контролируемых орбит (H<=1000 км) оптимальные орбиты размещения ИСЗ сети образуют последовательность эллипсов. Для более высоких орбит такое простое правило уже не имеет места и решения определяются численно. Эффективность сетей на эллиптических орбитах больше на 10-20%, чем эффективность сетей на круговых орбитах.
Таким образом, многоцелевой подход позволяет получать и анализировать решение сложных задач размещения.
Результаты
Разработан программный комплекс позволяющий рассчитывать сложную техническую систему, определяющим свойством которой является многообразие условий функционирования. С его использованием решены задачи оптимизации сетей искусственных спутников земли и номенклатуры двигательных установок малой тяги для космических установок. Комплекс позволяет получить как точное решение, так и приближенное аналитическое, с допускаемой, при этом, потерей эффективности.
Разработанный программный комплекс:
1. Позволяет решать указанную задачу для случая, когда оптимизируемая система характеризуется многомерным внешним множеством. (Например, диапазоном ожидаемых цен на продукцию или величиной внешних воздействий, или ожидаемым спросом и т. п.)
2. Может получать точное оптимальное решение.
3. Оценивает возможность приближенного решения задачи.
Библиографический список
1. А. «Технология научных исследовании»
2. С#: учебный курс – СПб.: Питер; К.: Издательская группа ВНV, 2003. – 512 с.
3. Методы оптимизации и оптимального управления: Учебное пособие/ Самарский государственный архитектурно-строительный университет. - Самара, 2004.
4. С Секреты создания приложений на языке C#. Москва.:СОЛОН-ПРЕСС, 2007.-728с.
5. Статьи и разработки А. (Многоцелевые системы)
