

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Задача поиска допустимого режима заключается в отыскании значений X при соблюдении (1) и (2).
Для расчета допустимого режима (РДР), (при фиксированном ![]() ) можно использовать разработанный и развиваемый в ИСЭМ СО РАН метод внутренних точек (МВТ). Алгоритм МВТ состоит в итеративной корректировке текущего приближения
) можно использовать разработанный и развиваемый в ИСЭМ СО РАН метод внутренних точек (МВТ). Алгоритм МВТ состоит в итеративной корректировке текущего приближения ![]() , удовлетворяющего (как и стартовая точка
, удовлетворяющего (как и стартовая точка ![]() ) строгим неравенствам
) строгим неравенствам ![]() . На каждом шаге такого процесса монотонно уменьшается норма вектора невязок
. На каждом шаге такого процесса монотонно уменьшается норма вектора невязок  ограничений равенств
ограничений равенств ![]() . Особенности реализации МВТ применительно к трубопроводным сетям исследованы в работах .
. Особенности реализации МВТ применительно к трубопроводным сетям исследованы в работах .
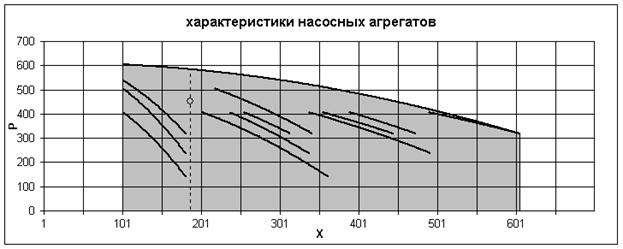
Метод отличается хорошей сходимостью, простотой реализации, требует минимальных модификаций при переходе к оптимизационным постановкам, инвариантностью в отношении учета как линейных, так и нелинейных ограничений, обеспечивает возможность идентификации факта их несовместности. С появлением дискретных переменных ![]() фактическая допустимая область становится несвязной и невыпуклой (рис.1.а.), что нарушает условия применимости МВТ.
фактическая допустимая область становится несвязной и невыпуклой (рис.1.а.), что нарушает условия применимости МВТ.
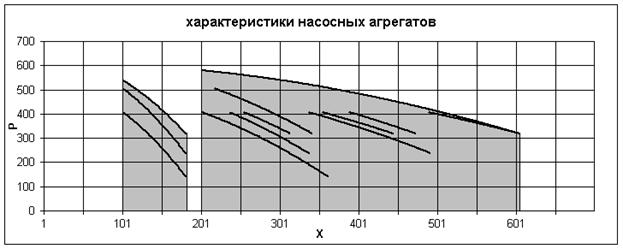
Предлагаемый алгоритм поиска допустимого режима основан на схеме ветвлений и отсечений и обеспечивает последовательное сужение области неопределенности режимов работы НС. Ветвление осуществляется за счет дробления зоны возможных производительностей НС, отсечение – за счет проверки допустимости режима в текущих условиях, а сама проверка – путем решения непрерывной задачи (с помощью МВТ), в которой вместо фактических областей параметров работы активных элементов используется их ближайшая выпуклая аппроксимация.
С учетом сказанного, вычислительный процесс поиска допустимого режима может быть организован следующим образом:.
1. Для всех ![]() (где IA – множество активных элементов) полагаем
(где IA – множество активных элементов) полагаем  ,
,  .
.
2. Определяются аппроксимирующие функции ![]() ,
, ![]() , которые в п.3 принимаются в роли гидравлических характеристик управляемых активных ветвей (рис.1.б).
, которые в п.3 принимаются в роли гидравлических характеристик управляемых активных ветвей (рис.1.б).
3. Решается непрерывная задача поиска необходимого дросселирования для ввода режима в допустимую область. Если допустимый режим не найден, то на п.5. Если для всех ![]()
![]() , –то решение общей задачи получено, где Di – фактическая допустимая область работы НС.
, –то решение общей задачи получено, где Di – фактическая допустимая область работы НС.
4. Ситуация ![]() для некоторого
для некоторого ![]() порождает два дополнительных варианта. Варианты записываются в очередь с новыми значениями допустимых производительностей i–й НС. В одном из них (по отношению к текущему варианту) корректируется только верхняя граница допустимой производительности как
порождает два дополнительных варианта. Варианты записываются в очередь с новыми значениями допустимых производительностей i–й НС. В одном из них (по отношению к текущему варианту) корректируется только верхняя граница допустимой производительности как ![]() , а в другом – нижняя –как
, а в другом – нижняя –как ![]() , причем
, причем ![]() – множество комбинаций, имеющих пересечения рабочих зон с диапазоном [
– множество комбинаций, имеющих пересечения рабочих зон с диапазоном [![]() ], а
], а ![]() – с диапазоном [
– с диапазоном [![]() ] (рис. 3.в).
] (рис. 3.в).
5. Выбирается очередной непросмотренный вариант из очереди и на п.2. Если очередь пуста – допустимого решения общей задачи нет.
Поиск решений по данному алгоритму для реальных объектов, как правило, осуществляется за небольшое число шагов. П.3 отсеивает сразу множество комбинаций, заведомо не содержащих решения, п.4 обеспечивает формирование вариантов, ближайших к решению непрерывной задачи, а используемая аппроксимация максимально сокращает текущую область неопределенности.
Допустимое решение задачи ПДР, может быть не единственным. Если к модели (1),(2) добавить критериальную функцию, то получим оптимизационную модель:
Технологические критерии (табл.2.) так или иначе связаны со стремлением минимизации управляющих воздействий при создании режима, переходе из одного режима в другой или реализации траектории смены режимов на некотором временном отрезке.
В первом случае их основной смысл – ограничение числа задействованного насосно-силового и запорно-регулирующего оборудования, а во втором – обеспечение стабильности его работы, что может быть выражено в стремлении минимизации: суммарного управления; мест приложения управлений; числа управляющих воздействий; нарушений режима по условиям работы оборудования и др.
|
|
|
|
Рис.1. Иллюстрация процесса дробления вариантов при поиске
допустимого режима.
а – фактическая область допустимых решений i-й НС; б – аппроксимация всей допустимой области (нулевой вариант); в – дробление исходной области и аппроксимация областей возможных решений порождаемых вариантов. 1 – точка, полученная из решения непрерывной задачи расчета допустимого режима.
Технологические критерии (табл.2.), так или иначе, связаны со стремлением минимизации управляющих воздействий при: 1) создании режима,; 2) переходе из одного режима в другой или реализации траектории смены режимов на некотором временном отрезке.
Табл.2. Возможные технологические критерии
Тип управления | Создание режима | Смена режима |
Непрерывноеые Переменные |
Минимум дросселирования |
Минимум регулирования |
Дискретноеые переменные |
Минимум мощности |
Минимум переключений |
где ![]() – весовой коэффициент, характеризующий желательность данного переключения, IР –- множество элементов с регулированиемветвей с регулированием;
– весовой коэффициент, характеризующий желательность данного переключения, IР –- множество элементов с регулированиемветвей с регулированием; ![]() – заданная и искомая величина эквивалентного дросселирования;
– заданная и искомая величина эквивалентного дросселирования; ![]() – заданная и искомая комбинация насосов.
– заданная и искомая комбинация насосов.
В первом случае их основной смысл – ограничение числа задействованного насосно-силового и запорно-регулирующего оборудования, а во втором – обеспечение стабильности его работы, что может быть выражено в стремлении минимизации: суммарного управления; мест приложения управлений; числа управляющих воздействий; нарушений режима по условиям работы оборудования и др.
Было исследовано несколько алгоритмов решения поставленной задачи. Первый из них основан на идее метода ветвей и границ (рис.2.):
1) генерируется ряд вариантов загрузки НС в порядке возрастания нижних оценок целевой функции ![]() , каждый из которых характеризуется своей комбинацией включенного оборудования;
, каждый из которых характеризуется своей комбинацией включенного оборудования;
2) для каждого из вариантов решается задача расчета допустимого режима по непрерывным переменным. Если режим существует и значение целевой функции для текущего варианта меньшее из всех просмотренных, то оно запоминается как рекорд. Если оценка для очередного варианта больше текущего рекорда или просмотрены все варианты, то – решение задачи получено и ему соответствует вариант, доставивший этот рекорд.
Недостатком данного подхода можно назвать значительное время расчета, обусловленное необходимостью просмотра большого числа вариантов, а также невозможность определения существования допустимого режима без полного обсчета всех 2n вариантов, где n – число всех НА в сети.
Второй предлагаемый алгоритм поиска оптимального режима базируется на модификации алгоритма поиска допустимого режима, которая заключаются в следующем:
1. Производится расчет нижней оценки целевой функции ![]() для каждого из генерируемых вариантов, и варианты в очереди выстраиваются по возрастанию значений
для каждого из генерируемых вариантов, и варианты в очереди выстраиваются по возрастанию значений ![]() .
.
2. По каждому найденному допустимому режиму вычисляется фактическое значение целевой функции, которое сравниваем с рекордом. Если оно меньше полученного ранее, то фиксируется новый рекорд.
 |
 |
Недостатком данного подхода можно назвать значительное время расчета, обусловленное необходимостью просмотра большого числа вариантов, а так же невозможность определения существования допустимого режима, без полного обсчета всех 2n вариантов, где n – число всех НА в сети.
Рис.2. Иллюстрация процесса дискретно-непрерывной оптимизации режима.
1 – нижняя оценка целевой функции (![]() ) по допустимым комбинациям (
) по допустимым комбинациям (![]() ) дискретных переменных; 2 – оптимальные значения
) дискретных переменных; 2 – оптимальные значения ![]() по непрерывным переменным; 3 – рекорд; 4 – точка прерывания процесса.
по непрерывным переменным; 3 – рекорд; 4 – точка прерывания процесса.
Второй, предлагаемый алгоритм поиска оптимального режима базируется на модификации алгоритма поиска допустимого режима, которая заключаются в следующем:
1.Производится расчет нижней оценки целевой функции ![]() для каждого из генерируемых вариантов и варианты в очереди выстраиваются по возрастанию значений
для каждого из генерируемых вариантов и варианты в очереди выстраиваются по возрастанию значений ![]() .
.
2.1.По каждому найденному допустимому режиму вычисляется фактическое значение целевой функции, которое сравниваем с рекордом. Если оно меньше полученного ранее, фиксируется новый рекорд.
3. Из очереди удаляются варианты со значениями ![]() больше рекорда.
больше рекорда.
4. Критерий останова – отсутствие в очереди вариантов со значениеями ![]() , меньшими текущего рекорда.
, меньшими текущего рекорда.
По сравнению с первым подходом, поиск оптимальных решений по этотму алгоритму, как правило, осуществляется за небольшое число шагов, что позволяет его применять для реальных задач большой размерности и в режиме реального времени, например при диспетчерском управлении. Однако, при смене целевой функции требуются изменения в реализации алгоритма, поэтому его использование при многокритериальной оптимизации может оказаться затруднительно.
Третий, более универсальный подход состоит в следующем: при наличии эффективных алгоритмов расчета допустимого режима, его оптимизацию можно организовать путем последовательного сокращения интервала неопределенности ![]() , заведомо содержащего оптимальное значения значение целевой функции
, заведомо содержащего оптимальное значения значение целевой функции![]() , где
, где ![]() ,
, ![]() – решение задачи поиска допустимого режима,
– решение задачи поиска допустимого режима, ![]() – нижняя оценка целевой функции, которую, как правило, можно назначить исходя из содержательного смысла задачи.
– нижняя оценка целевой функции, которую, как правило, можно назначить исходя из содержательного смысла задачи.
Соответствующая процедура оптимизации по некоторому критерию ![]() может быть сведена к следующем основным операциям:
может быть сведена к следующем основным операциям:
1. Пусть задано допустимое решение ![]() , доставляющее верхнюю границу заданного интервала
, доставляющее верхнюю границу заданного интервала  , где индекс итерации
, где индекс итерации ![]() . В соответствии с каким-либо методом дихотомии определяется величина
. В соответствии с каким-либо методом дихотомии определяется величина ![]() .
.
2. Решается задача поиска допустимого режима, в которой к имеющимся ограничениям на параметры режима добавляются условия: ![]() ,
, ![]() , где
, где ![]() – дополнительная фиктивная переменная.
– дополнительная фиктивная переменная.
3. Выполняется анализ: а) если допустимого решения нет, то ![]() ,
, ![]() , где
, где ![]() – допустимая точность оптимизации; б) если получено решение
– допустимая точность оптимизации; б) если получено решение![]() , то
, то  ,
,  ; в) если
; в) если ![]() , –то последнее допустимое решение является оптимальным. В противном случае полагаем
, –то последнее допустимое решение является оптимальным. В противном случае полагаем ![]() и переход на п.2.
и переход на п.2.
Приведенная вычислительная схема не претерпевает изменений, если оптимизация ведется только по непрерывным переменным, при этом вместо поиска допустимого режима на каждом ее шаге решается задача расчета допустимого режима.
Эффективность данного алгоритма была проверена на ряде реальных схем СППД и показала высокую эффективность при оптимизации режимов по различным критериям. Числовые характеристики работы алгоритма приведены в разделе 4.
Как отмечалось выше, по своей природе задачи оптимизации режимов ТПС являются многокритериальными. Существует значительное число подходов и методов многокритериальной оптимизации, среди которых, наиболее рациональным представляется способ, предполагающий предварительное ранжирование имеющихся критериев по степени важности для конкретных условий. Такое ранжирование, в том числе, может быть возложено на субъекта принятия решений по управлению, который при этом получает возможность менять приоритеты в заданной или избыточной системе критериев, в зависимости от конкретных особенностей ТПС и других текущих условий.
Пусть: ![]() – векторная целевая функция с компонентами
– векторная целевая функция с компонентами ,
,  , где индекс критерия
, где индекс критерия ![]() соответствует степени его приоритетности;
соответствует степени его приоритетности;  – подвектор
– подвектор ![]() с первыми
с первыми ![]() компонентами, а
компонентами, а ![]() – значение
– значение ![]() в точке решения
в точке решения ![]() по
по ![]()
![]() критериям. Тогда решение общей задачи может быть сведено к решению
критериям. Тогда решение общей задачи может быть сведено к решению ![]()
![]() задач вида:
задач вида:
![]()
![]() ,
, ![]() .
.
что, очевидно, может быть выполнено уже рассмотренными методами однокритериальной оптимизации. При этом верхняя граница очередного критерия автоматически получается как ![]() .
.
Таким образом, в работе предложена иерархия алгоритмов решения задач поиска допустимых и оптимальных режимов.
В третьей главе описывается методология и инструментальные средства для интерактивного конфигурирования создания информационно в-вычислительных комплексов (ИВК) под трубопроводные и гидравлические системы произвольного типа и назначения, различные классы задач (расчета режимов, анализа свойств, оптимизации схем и параметров) и цели проведения расчетов (проектирование, эксплуатация, диспетчерское управление). Так же представлена разработанная информационно- вычислительная среда (ИВС), обеспечивающая поддержку созданного информационно-вычислительного окружениявозможность интерактивного конфигурирования под трубопроводные и гидравлические системы произвольного типа и назначения, различные классы задач (расчета режимов, анализа свойств, оптимизации схем и параметров) и цели проведения расчетов (проектирование, эксплуатация, диспетчерское управление).
Моделирование реальных ТПС требует их представлении в виде многоуровневых сетевых структур, что не позволяет использовать для этих целей большинство существующих ГИС, основная функция которых – информационная, а не решения задач прикладного моделирования.
Предлагается следующая технология генерации ИВК (рис.3). Для настройки информационного окружения разработано два программных модуля – система настройки баз данных (СИНБАД) и система настройки расчетных задач (СИНРАЗ). Формируемая с их помощью структура реляционной БД позволяет реализовать следующие возможности:
1) моделируемая ТПС может состоять из множества расчетных схем различных типов (схемы сетей, насосных станций и т. д.);
2) схема определенного типа собирается из своего набора условных обозначений типов элементов;
3) каждый тип элемента может быть задан в одном из двух форматов – узел или связь;
4) реальный элемент ТПС (например, источник) может быть представлен как элементом какой-либо схемы, так и собственной расчетной схемой;
5) каждый элемент может находиться в одном из нескольких состояний (включен, выключен и т. д.), что предполагает необходимость поддержки для него нескольких условных обозначений;.
6) 
 все элементы определенного типа имеют одинаковый состав числовых и символьных параметров;
все элементы определенного типа имеют одинаковый состав числовых и символьных параметров;
Рис.3. Технология генерации ИВК.
7) информационная модель ТПС должна содержать не только данные по элементам ТПС, но и информацию о взаимосвязи:
· графического изображения каждого элемента со своими данными;
· элементов схемы между собой;
· разных схем между собой;
· каждой схемы со своим планом;
· каждой схемы со своим перечнем расчетных задач;
· порядка выполнения задач.
Для насыщения и работы с подобными реляционными БД разработана универсальная информационно-вычислительная среда (рис.4.), позволяющая интегрировать информационное окружение и вычислительные модули в рамках единого интерфейса пользователя. Обмен данными между всеми компонентами осуществляется через БД.
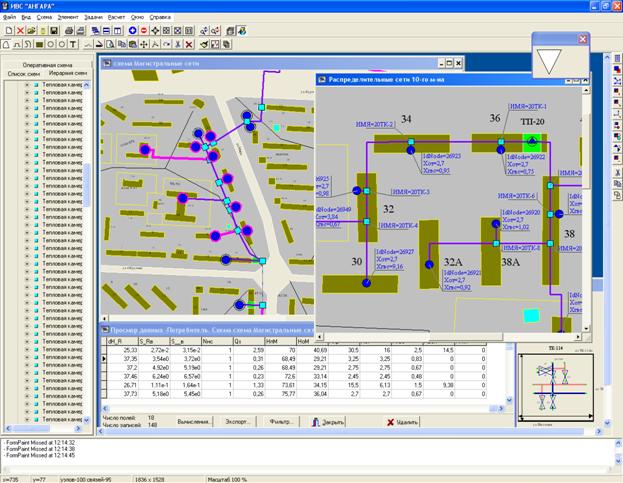 Рис.4. Интерфейс ИВСпрограммы визуализации расчетных схем.
Рис.4. Интерфейс ИВСпрограммы визуализации расчетных схем.
Основными функциями ИВС являются:
· графический многооконный интерфейс;
· редакторы плана, сети, данных;
· поддержка иерархии задач и процессов расчета;
· графическая интерпретация результатов расчета;
· сетевой многопользовательский режим работы;
· экспорт-импорт данных из других систем и др.
Разработка ИВС, СИНБАД и СИНРАЗ осуществлена в среде C++ Builder 5.0,. в Выбор которойданной среды обусловлен возможностью удобной и быстрой разработки пользовательского интерфейса, огромным набором разнообразных визуальных компонент, мощностью и гибкостью языка С++. Расчетные модули (ПВК), подключаемые к ИВС, могут быть написаны на различных языках программирования (С++, Fortran, Basic и др.).
В четвертой главе рассматриваются вопросыописывается практическое примененияе разработанных алгоритмов и программ. Приводится методика практического практического применения и апробации разработанных программного обеспечения для расчета режимов СППД, для расчета режимов СППД примеры ИВК, созданных на основе разработанной ИВС.
ИсследованияИсследование разработанных алгоритмов было проведено на ряде реальных схем СППД зЗападной Сибири (рис.5.). Эти системы характеризуются многоконтурностью, наличием нескольких источников, на каждом из которых работает до 10 и более насосных агрегатов.
В табл. 3. кратко даются характеристики некоторых из этих схем. В табл. 4. представлены некоторые результаты работы программы расчета допустимых режимов и программы двухкритериальной оптимизации по критерию минимума задействованного оборудования и минимума суммарного дросселирования. Время поиска допустимого режима для указанных схем не превышало 33 сек., максимальное время поиска оптимального режима составило 7 минут. Причем большая часть времени (до 80%) приходится на чтение-запись данных.
Как видно из табл.3., алгоритм поиска допустимого режима показал достаточноочень высокую эффективность. , такТак, например, для СППД Ноябрьска при возможных 229=комбинациях включения насосных агрегатов допустимый режим был найден за 16 шагов. В целом, оценивая эффективность работы алгоритма поиска допустимого режима, можно сделать вывод, что наибольшее влияние на число итераций оказывают не число насосных агрегатов или источников в сети, а жесткость ограничений по давлениям и наличие НА с разнотипными характеристиками на одном источнике.
В качестве примера применения технологии генерации ИВК и практического использования разработанной ИВС приводятся описания реализованных ИВК «ДиСППД» для расчета режимов СППД и ИВК «АНГАРА» для расчета режимов тепловых сетей, а также перечень их внедрений.
В приложении помещены: состав исходной информации для расчета режимов СППД, исходные данные по одному из расчетных примеров, протокол программы расчета допустимого режима, сведения о внедрениях.
В качестве примера применения технологии генерации ИВК и практического использования разработанной ИВС приводятся описания реализованных ИВК «ДиСППД» для расчета режимов СППД и, ИВК «АНГАРА» для расчета режимов тепловых сетей, а так же перечень их внедрений.
|
|
|
|
д) |
е) |
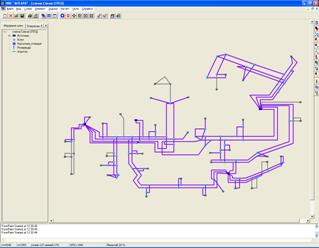 а)
а)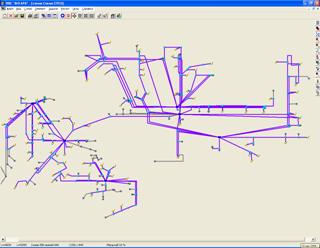 б)
б)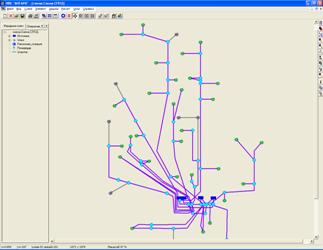 в)
в) г)
г)
Рис.5. Примеры расчетных схем.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
