
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Тема. Методы преобразования проекций. Вращение.
Содержание.
1. Введение.
2. Алгоритм вращения точки вокруг оси перпендикулярный к плоскости проекций.
3. Вращение прямой общего положения вокруг оси перпендикулярной плоскости вращения.
4. Вращения прямой уровня вокруг оси, перпендикуляр. Плоскости проекций до проецирующего положения.
5. Вращение плоскости.
6. Вращение плоскости общего положения до положения уровня.
1. 1. Введение. Решение задач значительно упрощается, когда прямые линии, плоские фигуры, плоскости находятся относительно плоскостей проекций в так называемых частных положениях – прямые и фигуры расположены параллельно, а плоскости перпендикулярно той или другой плоскости проекций. Такое положение фигур достичь можно вращением их вокруг проецирующих, линий уровня или координатных осей. Следовательно нужно научиться преобразовывать. Прямую общего положения в прямую уровня (на изображении имеем натуральную величину). В проецирующую прямую (на изображении прямая проецируется в точку).
2. Плоскость общего положения:
· в проецирующую плоскость
· в плоскость уровня.
Графический способ вращения состоит в том, что при вращении вокруг некоторой неподвижной прямой, называемой осью вращения, каждая точка вращаемого образа перемещается в плоскости, перпендикулярной оси вращения, описывая в ней окружность, радиус которой равен расстоянию точки от оси вращения.
2. Алгоритм вращения точки вокруг оси, перпендикулярной к плоскости проекции:
При вращении точки вокруг оси, перпендикулярной плоскости проекции V, она будет перемещаться во фронтальной плоскости, а поэтому радиус вращения и траектория точки будет без искажения проецироваться на фронтальную плоскость проекций.
Фронтальная проекция точки будет повторять перемещение самой точки, а горизонтальная проекция — перемещается по горизонтальному следу плоскости вращения
Рисунок 1 Рисунок 2
Рисунок вращения точки вокруг фронтально – проецирующей оси: в аксонометрии, на комплексном чертеже.
3. Вращение прямой общего положения, вокруг оси перпендикулярной плоскости проекций до положения уровня.
Рисунок 3 Рисунок 4
Вращаем вокруг горизонтально проецирующей оси поворотом одной точки (вторая лежит на оси вращения) до положения фронтали.
4.Вращение прямой общего положения в прямую уровня вокруг оси, перпендикулярной плоскости проекций и далее до проецирующего положения.
Рисунок 5
Вращаем точку В вокруг горизонтально проецирующей оси О1. Получаем фронталь.
Затем вторым вращением вокруг фронтально проецирующей оси О2 ось проходит как и в первом случае через точку прямой до положения горизонтально проецирующей.
Вращение прямой уровня относительно оси перпендикулярной плоскости проекций до проецирующего положения.
Рисунок 6
+Преобразование фронтальной прямой в горизонтально – проецирующую с помощью перпендикуляра к фронтальной проекции прямой.
5. Вращение плоскости вокруг оси, перпендикулярной плоскости проекции
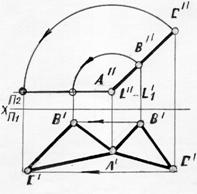
Рисунок 7
вращаем фронтальный след треугольника ABD вокруг фронтально проецирующей оси L'' проходящей через сторону треугольника A'', до положения уровня горизонтального на горизонтальной плоскости имеем натуральную величину плоскости.
6. Вращение плоскости общего положения до положения уровня.
Для преобразования плоскости в положение в положение уровня требуется двойное вращение.
1. преобразовать до положения проецирующей плоскости. Например, до положения фронтально проецирующей плоскости. Для этого её нужно повернуть вокруг горизонтально проецирующей оси L'' так, что бы горизонталь H'' плоскости стала фронтально проецирующей, и займёт положение, параллельное линиям связи, и совместно с неподвижной точкой плоскости определяет новое фронтально проецирующее положение плоскости. Фронтальные проекции точек плоскости в их новых положениях расположатся на прямой, которая и будет фронтальной проекцией плоскости. Полученную плоскость преобразуем в плоскость горизонтального уровня вращая плоскость вокруг оси
фронтально – проецирующей L2″ на Н. плоскости проекций имеем натуральную величину плоскости треугольника.
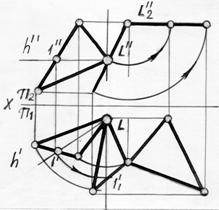
Рисунок 8
Тема: Способ замены плоскостей проекции.
Содержание.
Введение.
1.Способ замены плоскостей проекций на примере с точкой.
2. Проецирование прямой линии в точку.
3. Преобразование прямой общего положения в точку.
4. Преобразования плоскости общего положения в проецирующую плоскость.
5. Преобразование проецирующей плоскости в плоскость уровня (определение натуральной величины плоской фигуры).
6. Определение натуральной величины плоского треугольника АВС общего положения.
7. Примеры, определения натуральной величины сечений многогранников методами замены и совмещения.
Введение.
Цель метода состоит в задании новых изображений геометрических фигур удовлетворяющих определенным свойствам, при котором оставляют неизменным положение оригинала в пространстве, а заменяют одну или обе плоскости проекций так, чтобы интересующие нас прямые и плоскости оказались бы в частном положении по отношению к новой системе плоскостей проекций.
1. Способ замены плоскостей проекций на примере с точкой.
Пусть в системе плоскостей задана точка А (А’, A”). Выберем новое (не на фронтальную или профильную плоскости проекции как это делали раньше) направление X, примем такое что бы новая плоскость была перпендикулярна горизонтальной плоскости. Таким направлением будет прямая – горизонталь проведенная из точки. Новая плоскость является как бы новой по отношению к фронтальной (отсюда метод замены плоскостей проекций) и при этом остается важное свойство высоты (координаты) точек на новой плоскости равны координатам старым фронтальной плоскости.

Рисунок 1
Линия направления проецирования (линия связи) проецируется на горизонтальную плоскость перпендикулярно следу новой плоскости. Плоскость V1 пересекается с плоскостью H по прямой X1, которая определяет новую ось OX. Для определения проекции A1 на плоскости V1 достаточно спроецировать ее ортогонально. Из чертежа видно, что AxA”1=AxA” (высоты равны). Эпюр ( плоский чертеж получается совмещением плоскости V1 c H при этом A’xA”1 перпендикулярна оси –x1, Ax/A”1=AxA”. Схему преобразования можно записать так x-π2/π1>x1/ π1/π21. По этой же схеме можно выполнить замену горизонтальной плоскости и H на новую плоскость π2/π1 - >x1 – π2/π11
На основе изложенной закономерности встречается необходимость выполнить замену последовательно два, три и более многомерного пространства раз, выбирая направления проецирования и построения новой проекции по двум заданным
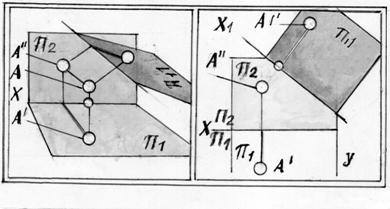
Рисунок 2
2. Проецирование прямой линии в точку.
Пусть прямая А1В является горизонталью в системе плоскостей проекций x-V/H требуется подобрать направление проецирования и новую плоскость проекции на которую данный отрезок проецировался бы в точку.
Решение. По условию.
Решенные две задачи: определена натуральная величина отрезка (горизонтальная проекция А'B' ) и определен угол наклона прямой АВ к фронтальной плоскости проекций V. Определяем направление проецирования по направлению отрезка АВ. Заменяем плоскость проекции π2 на новую плоскость π21 перпендикулярную прямой А’В’, а так же как прямая А1В1 параллельна π1 , то π21 будет перпендикулярна π1. Проекция такой плоскости ось Х1 перпендикулярна горизонтальной проекции отрезка А’В’. Схема преобразований х - π2/ π1 -> π1/ π21
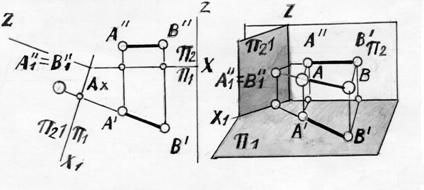
Рисунок 3
Прямая – горизонталь проецируется на плоскость π21 перпендикулярно π1 и её след Х1 на горизонтальной проекции перпендикулярна проекции А’В’ отрезка АВ.
2. Преобразования прямой общего положения в проецирующее положение.
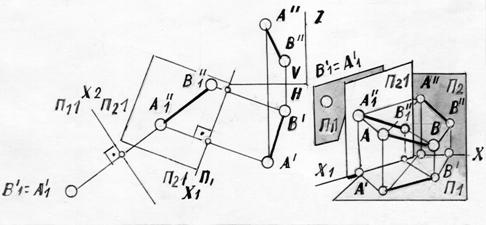
Рисунок 4
Схема преобразований х – π2/ π1 -> х1 – π1/ π2/ -> х2 π21 π11
4. Преобразование плоскости общего положения в проецирующую плоскость.
Задача может быть решена из определения: если плоскость содержит в себе перпендикуляр к другой плоскости, то эти плоскости взаимно перпендикулярны.
Если в заданной плоскости взять линию уровня, то преобразование такой прямой в проецирующее положение можно выполнить за одно преобразование. На рисунке показано такое преобразование. В плоскости АВС выбрана горизонталь h, к ней построена новая плоскость (её след X1), на которую треугольник ABC проецировался в отрезок A1’’B1’’.

Рисунок 5
Схема преобразований: x – π2/ π1->x1 π1/ π21
5. Преобразование проецирующей плоскости в плоскость уровня (определение натуральной величины плоской фигуры).
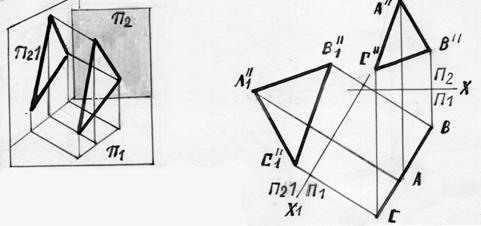
Рисунок 6
Схема преобразований x – π2/ π1->x2 π1/ π21
6. Определение натуральной величины плоского треугольника ABC общего положения.
Плоскость треугольника ABC плоскость общего положения следовательно требуется две замены. 1.Преобразование в проецирующее положение. 2.Преобразование плоскости в положение уровня.
Первую плоскость π21 выбираем перпендикулярно горизонтали плоскости C’’- 1’’. Вторую плоскость π11 параллельно треугольнику ABC, где след плоскости π11 будет соответствовать оси х2.
Рисунок 7
Схема преобразований х - π2/ π1 - > x1 - π1/π21 > x2 – π21/ π11
Решение матричных задач способом замены плоскости проекции.
При решении задач на практике приходится определять величину и форму геометрических объектов изображенных на чертеже. При этом возникают задачи двух видов
1. Определение натуральной величины плоской фигуры.
2. Определить по изображению расстояние или угол. При этом возникают четыре разные задачи:
1. Преобразовать прямую в прямую уровня
2. Преобразовать прямую в точку.
3.Преобразовать плоскость в проецирующее положение.
4.Преобразовать плоскость в плоскость уровня.
Решение остальных многих задач основывается на решении перечисленных четырех задач. Где используются приёмы способом замены плоскостей проекций.
Пример. Определить величину двухгранного угла при ребре АВ.

Рисунок 8
Двугранный угол измеряется линейным углом, полученный в пересечении граней двухгранного угла плоскостью, перпендикулярной к обоим граням двухгранного, а, следовательно, и к линии их пересечения, к ребру АВ. Если ребро АВ перпендикулярно к плоскости π1, то полученная проекция на плоскость π1 проекция двухгранного угла выражает его линейный угол.

Рисунок 9
На рисунке угол между двумя гранями определен в натуральную величину двойной последовательной заменой добиваемая перпендикулярного расположения плоскости 6 к ребру АВ по схеме π2/ π1 - > х1 - π2/ π11 - > х2 – π11/ π21.
8. Примеры. Определение натуральной величины сечений многогранников методами замены и совмещения.
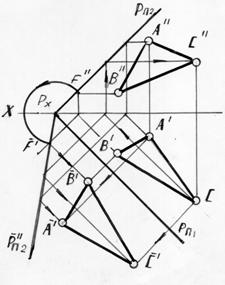
Рисунок 10
Натуральная величина треугольника АВС определена способом совмещения (вращения вокруг горизонтального следа плоскости Р параллельного плоскости, которая в этом случае является плоскостью общего положения).
Построена линия пересечения 3-гранной призмы с плоскостью общего положения.
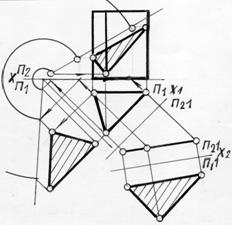
Рисунок 11
На горизонтальной проекции призмы выбраны линии уровня, которые параллельны горизонтальному следу плоскости общего положения на π2 плоскости оси Х. Натуральная величина сечения определена путем совмещения (вращения) плоскости сечения с плоскостью π1. Вокруг нулевой горизонтали следа плоскости.
