Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Государственное образовательное учреждение высшего профессионального образования
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ОТКРЫТЫЙ
УНИВЕРСИТЕТ
Научно-образовательный материал 1
«СТРУКТУРА МЕХАНИЗМОВ И МАШИН И ИХ ОСНОВНЫЕ ВИДЫ»
Состав научно-образовательного коллектива
1.
2.
3.
4.
5.
Москва 2011 г.
Оглавление
Введение…………………………………………………………….3
1. Основные понятия………………………………………………3
1.1. Механизм………………………………………………….3
1.2. Звенья и элементы механизма…………………………...3
1.3. Кинематические пары……………………………………5
1.4. Структурные и кинематические схемы…………………7
1.5. Виды звеньев……………………………………………...7
1.6. Классификация кинематических пар……………………8
1.7. Кинематические пары в плоских механизмах…………14
1.8. Некоторые особенности обозначения кинематических
пар и звеньев на схемах…………………………………15
1.9. Виды кинематических цепей……………………………18
1.10. Число степеней свободы механизма……………………19
2. Порядок составления структурной схемы…………………….21
2.1. Ознакомление с механизмом……………………………21
2.2. Правила составления структурной схемы……………...21
2.3. Пример составления структурной схемы………………21
2.4. Определение числа степеней свободы механизма……..25
3. «Лишние» степени свободы и избыточные (пассивные)
связи………………………………………………………………26
3.1. «Лишние» степени свободы………………………………..26
3.2. Избыточные связи…………………………………………..27
4. Маневренность манипулятора…………………………………..29
5. Основные виды механизмов…………………………………….30
6. Задание к самостоятельной работе……………………………...39
Приложение…………………………………………………………40
Введение
Теория механизмов и машин - это наука об общих методах исследования свойств механизмов и машин и их проектировании. Общность методов исследования и проектирования механизмов и машин определяется тем, что в механизмах, несмотря на их различное целевое назначение и конструктивное оформление, можно выделить основные составные части, выполняющие одинаковые функции. Изучению таких составных частей посвящен раздел курса теории механизмов и машин, называемый «Структура механизмов». Как и в других разделах курса, здесь можно выделить три основные части: общие положения, структурный анализ и структурный синтез. В данной работе рассматриваются общие понятия, касающиеся структуры механизмов, а также некоторые вопросы структурного анализа, который начинается с составления упрощенного чертежа механизма - схемы. Без умения составить и прочитать схему, не возможны ни освоение всех разделов курса теории механизмов и машин, ни инженерная деятельность конструктора и эксплуатационника механизмов.
Для получения навыков в составлении схемы механизма и усвоения отдельных вопросов, связанных со структурным анализом механизмов, предусмотрена самостоятельная работа. К её выполнению следует приступить после ознакомления с основными понятиями, изложенными в данном пособии. Для лучшего усвоения изучаемого материала целесообразно выполнять упражнения, указанные в разделе 1. Задание к самостоятельной работе приведено в конце НОМа.
1. Основные понятия.
1.1. Механизм. Механизмом называется система тел, предназначенная для преобразования движения одного или нескольких твердых тел и(или) сил, действующих на них, в требуемое движение других тел и(или) сил.
Примечание. В теории механизмов и машин под твердыми телами понимают как абсолютно твердые, так и деформируемые.
Известно, что преобразование движения в механической системе всегда сопровождается преобразованием сил. Вместе с тем целевое назначение механизма может состоять либо только в преобразовании движения, либо только в преобразовании сил (например, механизм домкрата), либо в том и другом одновременно.
Убедиться в преобразовании движения твердых тел в механизме можно, рассмотрев механизм двигателя внутреннего сгорания, в котором возвратно-поступательное движение поршня преобразуется во вращательное движение вала. Все предлагаемые ниже упражнения выполняются по модели механизма двигателя внутреннего сгорания.
Упражнение 1. Возьмите модель механизма и, вращая ручку, приведите его в движение. Обратите внимание на характер движения отдельных твердых тел механизма, в том числе на характер движения вала, соединенного с ручкой, и поршня.
Из определения механизма следует, что механизм предназначен для преобразования движения твердых тел, однако, в состав механизма могут входить также тела иной физической природы: жидкие и газообразные. Они предназначены для передачи движения между твердыми телами, участвующими в преобразовании движения. Если в состав механизма входят жидкие или газообразные тела, то механизм называется, соответственно, гидравлическим или пневматическим.
1.2. Звенья и элементы механизма. Твердое тело механизма, участвующее в преобразовании движения называется звеном. Звено может состоять из одной детали или нескольких жестко соединенных деталей. Однако, в состав механизма могут входить твердые тела, не участвующие в преобразовании, а предназначенные для обеспечения взаимодействия звеньев, не контактирующих между собой. Твердотельный, жидкостный или газовый компонент механизма, обеспечивающий взаимодействие его звеньев, не контактирующих непосредственно между собой, называется элементом механизма.
На рис. 1,а показано звено, состоящее из одной детали, а на рис. 1,б – из 4-х неподвижно соединенных деталей. Указанные звенья входят в состав механизма двигателя внутреннего сгорания.
а |
б |
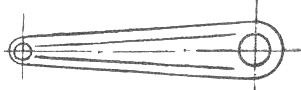
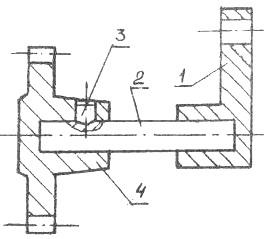
Рис.1 Варианты выполнения звеньев
1.3. Кинематические пары. В механизме твердые тела подвижно соединены друг с другом, причем, в общем случае, одно твердое тело может образовывать подвижные соединения с несколькими твердыми телами. Разные подвижные соединения могут обладать разными кинематическими свойствами. Поэтому при исследовании механизмов рассматривается соединение отдельно каждой пары твердых тел. Соединение двух твердых тел механизма, допускающее заданное относительное движение называется кинематической парой.
Так как твердые тела в зависимости от выполняемых функций могут быть отнесены либо к звеньям, либо к элементам механизма, то кинематические пары могут быть образованы твердыми телами в следующем сочетании: звеном и твердотельным элементом; двумя твердотельными элементами; двумя звеньями.
1.3.1. Кинематическая цепь. Система звеньев и (или) твердотельных элементов механизма, образующих между собой кинематические пары, называется кинематической цепью.
1.3.2. Кинематическое соединение. Кинематическая пара, образованная с помощью кинематической цепи, называется кинематическим соединением. К кинематическим соединениям относятся подвижные соединения двух звеньев механизма, между которыми находятся твердотельные элементы. Примером может служить соединение двух звеньев механизма с помощью шарикоподшипника (рис. 2). Здесь шарики подшипника представляют собой твердотельные элементы, а само кинематическое соединение реализуется следующей кинематической цепью: звено 1 - твердотельный элемент (шарик) – звено 2. В этом кинематическом соединении считается, что наружное кольцо подшипника принадлежит звену 1, а внутреннее – звену 2.
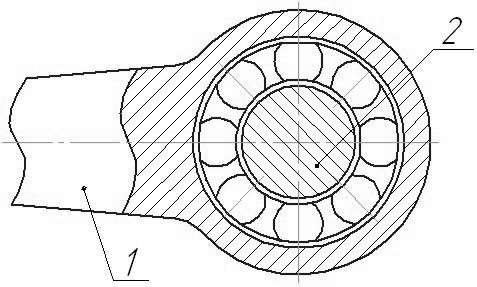
Рис. 2. Шарикоподшипник
1.3.3. Сопряжение. Сопряжением называется кинематическая пара, в которой твердые тела соприкасаются непосредственно друг с другом. К сопряжениям относятся все кинематические пары, образованные между собой твердотельными элементами, звеном и твердотельным элементом, а также двумя звеньями, между которыми нет твердотельных элементов, например, если вместо шарикоподшипника использовать подшипник скольжения.
Так как кинематическое соединение и сопряжение могут обеспечивать одинаковое относительное движение звеньев, то при исследовании структуры механизмов кинематическое соединение можно условно рассматривать как сопряжение.
1.4. Структурные и кинематические схемы. При исследовании структуры механизмов можно на схеме изображать только звенья и образованные ими кинематические пары. В связи с этим точное определение схемы запишется следующим образом: схема механизма – это графическое изображение механизма, на котором посредством условных обозначений показаны принятые для исследования модели звеньев и кинематических пар.
Схемы делятся на структурные и кинематические. Структурной называется безмасштабная схема, предназначенная для исследования его структуры. При исследовании структуры звенья, как правило, считаются абсолютно твердыми, а кинематические пары считаются выполненными в виде сопряжения.
Кинематической называется схема, выполненная в масштабе.
1.5. Виды звеньев. В каждом механизме имеется одно звено неподвижное или условно принимаемое за неподвижное. Оно называется стойкой.
Например, в двигателе внутреннего сгорания стойкой является корпус двигателя (сам корпус может перемещаться вместе с автомобилем, однако его принимают за неподвижный, так как движение остальных звеньев рассматривается относительно корпуса).
На схеме механизма стойка изображается подштрихованным отрезком, в тех местах, где она образует кинематическую пару с тем или иным звеном.
Звено, которому сообщается движение, преобразуемое механизмом. В требуемые движения других звеньев, называется входным. Оно получает движение либо от двигателя, либо перемещается под действием сжатого газа или находящейся под давлением жидкости.
Звено, совершающее движение, для выполнения которого предназначен механизм, называется выходным.
Оно соединено с рабочим органом машины или указателем прибора.
Широкое применение в различных областях техники носили механизмы с одним входным и одним выходным звеном. Вместе с тем применяются и механизмы с несколькими входными звеньями. Например, в автомобилестроении используется так называемый дифференциальный механизм с одним входным звеном, соединенным с двигателем и два выходных, соединенных с колесами. Дифференциальный механизм, используемый для сложения чисел, имеет два входных звена, перемещение которых пропорционально слагаемым, и одно выходное звено, перемещение которого пропорционально сумме слагаемых величин.
Упражнение 2.
А) определите количество подвижных звеньев в механизме двигателя внутреннего сгорания;
Б) установите, скольким звеньям можно задавать независимые друг от друга движения. Для этого достаточно зафиксировать поршень и попытаться провернуть кривошип. Если это не удастся сделать, то, следовательно, данный механизм имеет только одно входное звено. В противном случае – больше. Уясните, какое звено является входным, а какое - выходным.
В) определите общее количество кинематических пар в механизме.
1.6. Классификация кинематических пар
Кинематические пары различаются характером относительного движения твердых тел, образующих пару, а в сопряжениях – характером соприкосновения тел. Для перехода к детальному рассмотрению этих вопросов необходимо остановиться на основных определениях, касающихся кинематических пар.
Сопрягаемый элемент твердого тела (звена) – совокупность поверхностей твердого тела в механизме, по которым оно может соприкасаться с другим твердым телом, образуя сопряжение.
Элемент кинематической пары – общая поверхность, линия или точка, образуемая сопрягаемыми элементами двух твердых тел.
1.6.1. В зависимости от вида элемента кинематической пары последние делятся на низшие и высшие.
Низшая пара – это сопряжение, элементом которого является поверхность.
Высшая пара – это сопряжение, элементом которого является линия или точка.
Так как механизм может использоваться для преобразования сил, то в этом случае между твердыми телами возникают силы и, следовательно, элемент кинематической пары оказывается нагруженным.
При одинаковых усилиях, воздействующих на элемент кинематической пары, удельная нагрузка у низшей пары будет существенно меньше, чем у высшей пары ввиду гораздо большей площади, воспринимающей силу. Однако высшие пары позволяют получать большее число относительных движений твердых тел, образующих пару. Как будет показано далее, использование высших кинематических пар позволяет получать механизмы с большими функциональными возможностями, а также уменьшить число звеньев при тех же функциональных возможностях.
1.6.2. Классификация кинематических пар по числу степеней свободы (или по числу ликвидированных степеней свободы – связей)
Прежде всего, отметим, что все механизмы (а, следовательно, и входящие в них кинематические пары) можно разделить на две большие группы: плоские и пространственные. Плоским называется механизм, подвижные звенья которого совершают плоское движение, параллельные одной и той же неподвижной плоскости. Пространственным называется механизм, в котором точки некоторых из его звеньев описывают пространственные или плоские траектории, расположенные в пересекающихся плоскостях.
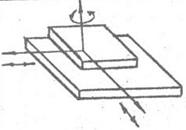
Из теоретической механики известно, что тело, свободно движущееся в пространстве, может совершать 6 независимых друг от друга перемещений: три вдоль координатных осей и три – вокруг координатных осей.

Рис. 3. Возможные перемещения свободного тела в пространстве
Каждое независимое перемещение соответствует одной степени свободы. Следовательно, свободное тело в пространстве имеет 6 степеней свободы. Из определения кинематической пары следует, что она представляет собой соединение двух твердых тел, допускающее их относительное движение. Рассмотрим движения двух твердых тел, образующих подвижное соединение (рис. 4).
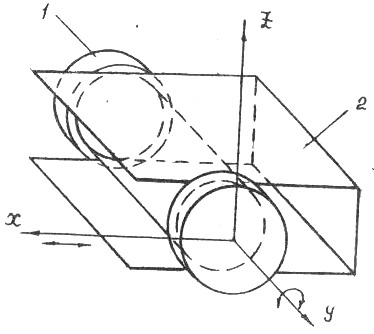
Рис. 4. Возможные движения двух подвижно соединенных твердых тел.
Из рис.4 видно, что тело 1 может скользить вдоль оси х и вращаться вокруг оси z. Движение вдоль осей y и z и вращение вокруг осей y и х невозможно из-за ограничений, наложенных телом 2. следовательно, подвижное соединение двух твердых тел уменьшает их число степеней свободы, т. е. накладывает связи на относительное движение этих тел.
Поэтому и кинематическая пара, представляющая подвижное соединение двух твердых тел, помогает определить число связей, уменьшая число степеней свободы в их относительном движении.
![]() (1)
(1)
Где W – число степеней свободы, S – число связей.
Из (1) следует, что
![]() (2)
(2)
Т. е. в любой кинематической паре сумма числа связей и числа степеней свободы всегда равна 6.
Так как кинематическая пара налагает, как минимум, одну связь, то максимальное число степеней свободы Wmax=5; минимальное же число степеней свободы Wmin=1, так как при W=0 относительное движение отсутствует.
По предложению известного ученого в области теории механизмов и машин все кинематические пары подразделяются на одно-, двух-, трех-, четырех - и пятиподвижные.
По предложению акад. кинематические пары подразделяются на классы, причем номер класса равен числу налагаемых связей. Поэтому согласно формуле (2) одноподвижная пара относится к пятому классу, двухподвижная - к четвертому и т. д.
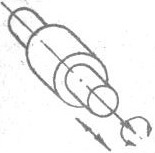
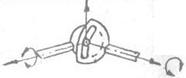
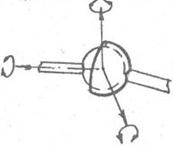
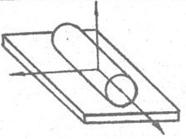
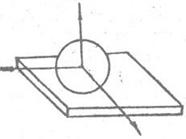
В табл. 1 показаны примеры некоторых кинематических пар с различным числом степеней свободы, у которых возможные относительные движения показаны стрелками (кроме винтовой пары). Дано их название и условное обозначение на схемах. Из представленных в таблице пар только пары цилиндр – плоскость и шар – плоскость являются высшими, остальные – низшие.
Таблица 1
Число степеней свободы | Число связей | Название пары | Рисунок | Условное обозначение |
1 | 5 | Поступательная |
|
|
1 | 5 | Вращательная |
|
или
|
1 | 5 | Винтовая |
|
|
2 | 4 | Цилиндрическая |
|
|
2 | 4 | Сферическая с пальцем |
|
|
3 | 3 | Сферическая |
|
|
3 | 3 | Плоскостная |
|
|
4 | 2 | Цилиндр-плоскость |
|
|
5 | 1 | Шар-плоскость |
|
|









В качестве примера рассмотрим одноподвижные кинематические пары. Им дают название в зависимости от вида относительного движения: поступательная, вращательная, винтовая. В винтовой паре относительное движение винтовое, т. е. движение, при котором перемещения вдоль и вокруг оси связаны между собой определенной зависимостью.
Следует иметь в виду, что конструктивное оформление любой кинематической пары всегда исключает возможность размыкания ее звеньев в процессе работы механизма.
1.7. Кинематические пары в плоских механизмах. Все механизмы можно разделить на две группы: плоские и пространственные. Пространственным называется механизм, в котором точки некоторых из его звеньев описывают пространственные или плоские траектории, расположенные в пересекающихся плоскостях. Плоским называется механизм, подвижные звенья которого совершают плоское движение, параллельные одной и той же неподвижной плоскости.
Следовательно, здесь все подвижные звенья совершают плоское движение.
Из рассмотрения плоского движения свободного тела (рис. 5) следует, что оно может совершать только три независимых движения (два поступательных и одно вращательное вокруг оси, перпендикулярной плоскости ХУ), следовательно, оно имеет три степени свободы.
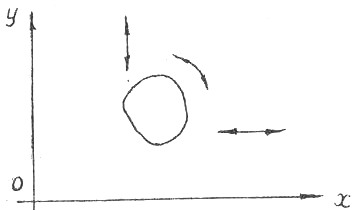
Рис. 5. Возможные движения свободного твердого тела в плоскости.
Поэтому в плоском механизме кинематические пары могут быть только одноподвижные (пятого класса) и двухподвижные (четвертого класса), твердые тела которых совершают плоское относительное движение.
Для этих пар сохранен номер класса общей классификации, несмотря на то, что пара пятого класса налагает в плоскости две связи, а пара четвертого класса – одну. В плоских механизмах двухподвижные пары обычно являются высшими, а одноподвижные – низшими.
Упражнение 4. Определите вид и число подвижностей кинематических пар в механизме двигателя внутреннего сгорания.
1.8. Некоторые особенности обозначения кинематических пар и звеньев на схемах. Обозначения, применяемые для кинематических пар должны давать наглядное представление о характере относительного движения твердых тел, составляющих данную пару. Примеры условного обозначения некоторых кинематических пар приведены в табл. 1.
При изображении звеньев необходимо учитывать, что конструктивная форма не влияет на исследуемые свойства механизма, поэтому от нее следует отказаться.
Стойку показывают подштриховкой в тех местах, где она образует кинематические пары с подвижными звеньями. На рис. 6 показаны вращательная и поступательная пары, образованные подвижным звеном со стойкой.
а |
б |
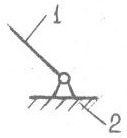
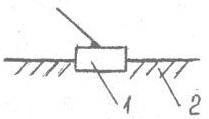
Рис. 6. Условные обозначения кинематических пар, образованных подвижным звеном 1 со стойкой 2. а) вращательная пара, б) поступательная пара.
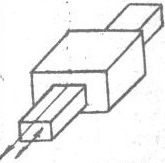
Звено, входящее в состав двух вращательных пар, изображается условно в виде прямой линии с двумя кружками на концах (см. рис. 7б), независимо от реальной формы звена (рис. 7а).
а |
б |
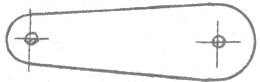
Рис. 7. Звено, входящее в две вращательных пары. а) возможная форма, б) условное обозначение
Если звено входит в К вращательных пар, то оно изображается в виде К-угольника с кружками в вершинах (рис. 8а). Смежные стороны многоугольника соединяют дугами. Если центры нескольких вращательных пар лежат на одной прямой, то звено изображается как показано на рис. 8б
а |
б |
в |

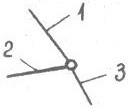
Рис. 8. а) звено, входящее в 5 вращательных пар, б) звено, входящее в 3 вращательных пары с центром на одной прямой, в) три звена, образующие две вращательные пары.
В некоторых механизмах центры нескольких вращательных пар могут лежать на одной прямой, перпендикулярной к плоскости движения звеньев, в работе [4] их предлагается называть совмещенными (рис. 8в). На схеме проекции этих пар совпадают. Для дальнейшего исследования может оказаться важным в каком сочетании звеньев образуются кинематические пары. На рис. 9 показаны варианты образования кинематических пар. Номер пары обозначен римской цифрой, а рядом в скобках указаны номера звеньев, образующих данную пару.
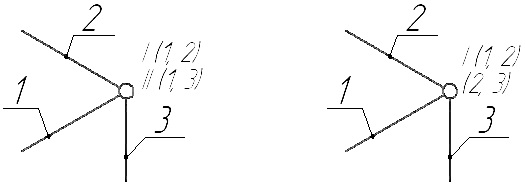
Рис. 8. Варианты образования совмещенных кинематических пар.
При чтении схем с совмещенными кинематическими парами необходимо иметь ввиду, что в таких случаях число пар равно числу звеньев минус единица.
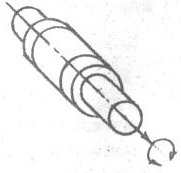
В технике широко применяются кулачковые и зубчагые механизмы. Кулачком называют звено, которому принадлежит элемент высшей пары выполненной в виде поверхности переменной кривизны. В механизме двигателя внутреннего сгорания кулачок представляет собой диск. Некоторые участки профиля этого диска ограничены дугами окружности. Расстояние от оси вращения до различных точек профиля на этих участках постоянно. На других участках расстояние от оси вращения до различных точек профиля переменное. Такое оформление профиля обеспечивает прерывистое возвратно-поступательное движение сопряженного с кулачком звена - толкателя при непрерывном вращении кулачка. Толкатель соединен с клапаном, открывающимся в периоды по - цачи в камэру газовой с гласи и отвода выхлопных газов и закрытым в процессе сжатия и сгорания смеси. При изображении кулачка на зхеме показывают очертание его профиля.
Зубчатое колесо имеет периодически чередующиеся высгупы-зубья. Взаимодействуя с зубьями другого колеса, оно передает зращатальное движение. На виде спереди колесо изображают сплошной окружностью.
Звено, состоящее из кулачка и зубчатого колеса, представлено на рис. 9. Жесткая связь этих тел указана с помощью вспомогательного отрезка и двух дуг.
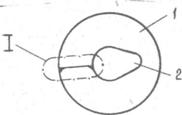
Рис. 9. Изображение эвена, состоящего из вубчатого колеса и кулачка: 1 - зубчатое колесо; 2 - кулачок; I - условное обозначение жесткого соединения деталей
1.9. Виды кинематических цепей. Ранее было дано определение кинематической цепи как совокупности твердых тел, образующих между собой кинематические пары. Кинематические цепи бывают замкнутыми и незамкнутыми. Замкнутой называется кинематическая цепь, каждое твердое тело которой образует кинематические пары по крайней мере с двумя другими твердыми телами (рис. 10а).
Незамкнутой называется кинематическая цепь, в которой имеется хотя бы одно твердое тело, входящее только в одну кинематическую пару (рис. 10б).
а |
б |
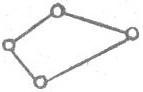
Рис. 10. Виды кинематических цепей
Если твердые тела кинематической цепи могут быть звеньями механизма, то, приняв одно из них за неподвижное, получим механизм, причем свойства механизма будут зависеть от того, какое звено принять за стойку.
Наиболее часто для создания механизмов используются замкнутые кинематические цепи. Однако в последние десятилетия развитие атомной энергетики, подводных исследований потребовало создания механизмов, имитирующих движение человеческой руки. Для их создания использовались незамкнутые кинематические цепи. Эти механизмы назвали манипуляторами.
1.10. Число степеней свободы механизма. Для того чтобы звенья механизма пришли в движение, одному или нескольким звеньям сообщают движение. Выше указывалось, что такие звенья называются входными. Следовательно, положение звеньев механизма определяется координами (условными или линейными) входных звеньев. Эти координаты называются обобщенными. Число обобщенных координат равно числу степеней свободы механизма и обычно соответствует числу входных звеньев.
Рассмотрим пространственный механизм с числом подвижных звеньев n. Если бы эти звенья не соединялись друг с другом, то их общее число степеней свободы было бы равно 6n. Однако, в составе механизма каждая одноподвижная пара налагает 5 связей, каждая двухподвижная – 4 и т. д. Если все связи независимы, то разносгь между общим числом степеней свободы и суммарным числом налагаемых связей определяет число степеней свободы механизма:
![]() (3)
(3)
где р1 - число одноподвижных пар, р2 - число двухподвижных и т. д.
Для плоского механизма
![]() (4)
(4)
Значение коэффициентов в формуле (4) связано со следующими обстоятельствами: свободное тело в плоском движении имеет три степени свободы, одноподвижная пара налагает в плоскости две связи, а двухподвижная - одну.
Следует отметить, что наиболее широко в технике используются механизмы, степень свободы которых равна 1или 2. Однако, в последнее время начинают широко применять механизмы с числом степеней свободы 3,4,5,6 и т. д. К таким механизмам относятся прежде всего манипуляторы (промышленные роботы).
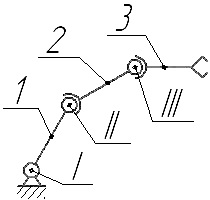
Рис. 11. Схема манипулятора
Как видно на рис. 10 число звеньев манипулятора (1, 2, 3) равно числу его кинематических пар (I, II, III). В связи с этим формулу (3) можно записать в виде
![]() (5)
(5)
Из формулы (5) следует, что число степеней свободы манипулятора соответствует суммарному числу подвижностей, входящих в манипулятор кинематических пар.
Упражнение 5. Используя модель механизма двигателя внутреннего сгорания, определите требуемое количество входных звеньев. Для этого можно, зафиксировав положение одного из звеньев механизма (например, кривошипа), попытаться изменить положение других звеньев (шатуна, поршня). Если изменить положение других звеньев не удастся, значит, в механизме одно входное звено.
Упражнение 6. Для нахождения количества входных звеньев промышленного робота следует определить число двигателей (электродвигателей, пневмо - или гидродвигателей). Если система управления роботом позволяет, то поочередно выполнить движение каждым из входных звеньев.
2. Порядок составления структурной схемы
2.1. Ознакомление с механизмом. Имея перед собой механизм (модель механизма), привести в движение его звенья и, наблюдая за характером движения отдельных частей, определить:
вид механизма: плоский или пространственный;
количество подвижных звеньев;
число кинематических пар;
вид каждой кинематической пары.
Для определения числа подвижностей кинематической пары целесообразно два эвена, образующих пару, мысленно отделить от остальных звеньев механизма и, полагая одно из звеньев неподвижным, определить число возможных относительных движений второго звена.
2.2. Правила составления структурной схемы механизма. На схеме взаимное расположение кинематических пар, образованных звеньями со стойкой, должно соответствовать их положению на механизме. Поэтому вычерчивание схемы следует начинать с изображения этих кинематических пар. Положение подвижных звеньев принять таким, при котором изображение механизма будет достаточно на глядным. Следует также выдержать соотношение между размерами звеньев. Такая схема будет приближена к кинематической и даст полное представление о механизме.
2.3. Пример составления структурной схемы
В качество примера рассмотрим порядок составления структурной схемы по модели механизма двигателя внутреннего сгорания.
А) По характеру движения звеньев устанавливаем, что механизм плоский.
Б) Находим звенья механизма (см. приложение)
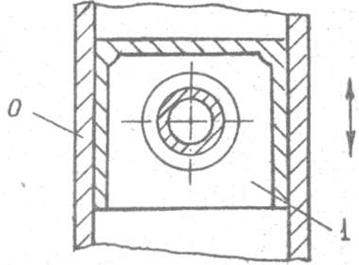
Рис. 12. Поршень и цилиндр
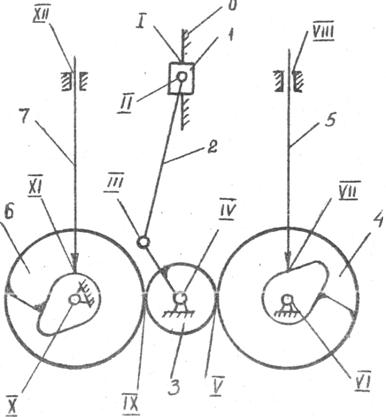
Корпус двигателя является стойкой. Стойка на схеме обозначена цифрой 0. Рассматриваем движение остальных звеньев по отношению к корпусу. Подвижных звеньев в механизме семь: 1 - поршень, 2 - шатун, 3 - кривошип с зубчатым колесом, 4, 6 - кулачок о зубчатым колесом, 5, 7 - толкатель.
В) Звенья механизма образуют 12 подвижных соединений - кинематических пар. Рассмотрим их. Нумерация пар соответствует принятой на структурной схеме, (см. приложение).
Первая пара (I) образована поршнем 1 и цилиндром 0, допускает только одно относительное движение - поступательное. Соприкосновение звеньев происходит по цилиндрической поверхности. Данная пара - поступательная (низшая, одноподвижная) (рис. 12).
Вторая (II) - поршень 1 с шатуном 2 образуют вращательную пару, так как шатун по отношению к поршню (или поршень по отношению к шатуну) может совершать только вращательное движение (рис.13). Внутренняя цилиндрическая поверхность отверстия шатуна соприкасается с наружной цилиндрической поверхностью штифа, связанного с поршнем. Пара низшая, одноподвижная.
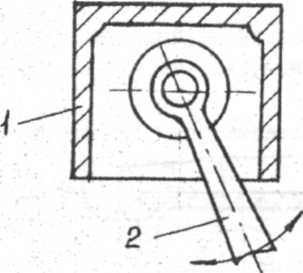
Рис. 13. Поршень и шатун
Третья (III) - шатун 2 с кривошипом звена 3 образуют вращательную пару, так как она допускает только одно относительное движение - вращательное (рис.14). В данной паре звенья соприкасаются по цилиндрической поверхности. Пара низшая, одноподвижная.
Четвертая, шестая, десятая (IV, VI, X) - вращательные пары (низшие, одноподвижные), образованы соответственно звеньями 3, 4, 6 со стойкой.
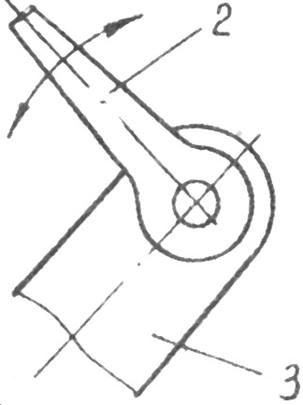
Рис. 14. Кривошип и шатун
Пятая, девятая (V, IX) - плоские пары, образованы зубчатыми колесами звеньев 3 - 4 и Передача движения между колесами осуществляется с помощью зубцов. На схеме (рис.15) видно, что одно колесо по отношению к другому может перемещаться поступательно вдоль общей касательной Т - Т и поворачиваться вокруг точки контакта.
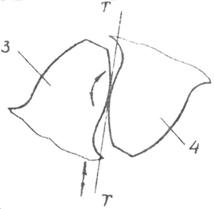
Рис. 15. Зубчатые колеса
Плоские двухподвижные пары являются высшими, так как элементы кинематической пары - выпуклые криволинейные поверхности - соприкасаются по линии (на чертеже видна проекция линии - точка).
Седьмая, одиннадцатая (УП, XI) - плоские пары, каждая из которых образована кулачком и толкателем (звенья 4 - 5 и
Толкатель 5 по отношению к кулачку 4 (или наоборот) может перемещаться поступательно вдоль общей касательной Т-Т и вращаться вокруг точки контакта (рис.16).
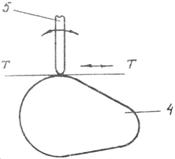
Рис. 16. Кулачок и толкатель
Соприкосновение звеньев происходит в точке. Пара высшая, двухподвижная.
VIII и ХП - поступательные пары, образованные стойкой и соответственно звеньями 5 и 7. Пара низшая, одноподвижная.
2.4. Определение числа степеней свободы механизма.
Число подвижных звеньев n=7, количество одноподвижных пap p1=8, а одноподвижных р2=4.
![]()
Структурная схема механизма показана в приложении.
Примечание 1. При составлении структурных схем манипуляторов (промышленных роботов) разрешается вместо кинематических соединений изображать эквивалентные кинематические пары.
Примечание 2. Считать, что пальцы охвата жестко соединены друг с другом.
3. «Лишние» степени свободы и избыточные (пассивные) связи
При составлении структурных схем и определении числа степеней свободы механизмов следует отметить, что в некоторых механизмах, кроме степеней свободы и связей, активно воздействующих на характер движения звеньев механизмов, могут встретиться степени свободы и связи, не оказывающие влияние на движение звеньев механизма в целом.
3.1. «Лишние» степени свободы
Определим степень подвижности кулачкового механизма, изображенного на рис.17. Из схемы видно, что число подвижных звеньев n=3, число одноподвижных кинематических nap p1=3 (I, III, IV); звенья 1 и 2 образуют высшую пару (IV) - p2 =1. Таким образом,
![]()
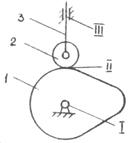
Рис. 17. Кулачковый механизм
Две степени свободы механизма свидетельствуют о том, что произвольные движения можно задавать двум звеньям механизма: кулачку 1 и цилиндрическому ролику 2. В то же время, очевидно, что вращение цилиндрического ролика не изменит положения толкателя. Таким образом, возможность вращения ролика 2 является лишней степенью свободы, и при работе механизма сообщать движение этому звену нет необходимости. Ролик 2 без всякого нарушения характера движения звеньев механизма можно удалить. Толкатель снабжают роликом только с целью замены трения скольжения между толкателем и кулачком трением качения.
3.2. Избыточные (пассивные) связи
Рассмотрим шарнирный четырехзвенник (рис.18), состоящий из звеньев 1, 2, 3 (звено 4 пока не учитываем). Число степеней свободы
![]()
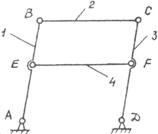
Рис. 18. Механизм сдвоенного параллелограмма
Если в таком механизме длины звеньев АВ=DС и АD=ВС, то при любом положении звена 1 фигура АВСD будет параллелограммом и расстояние между точками звеньев 1 и 3, измеренное по линии, параллельной звену ВС, неизменно. Поэтому установка на таком механизме звена 4, параллельного и равного по длине звену ВС, не вносит новых геометрических связей, а повторяет уже имеющиеся и не меняет число степеней свободы, хотя по формуле (3) получается ![]() . Звено 4 в данном механизме налагает так называемые избыточные связи. Избыточными (пассивными) их называют потому, что их устранение не изменяет числа степеней свободы. Наличие избыточных связей требует высокой точности изготовления механизма. Так, в рассмотренном механизме при невыполнении условия EF=ВС движение либо становится невозможным, т. е. число степеней свободы действительно будет равно нулю, либо перемещение будет происходить за счет деформации звеньев. Деформации создают дополнительные усилия, ухудшают условия работы механизма, уменьшают его долговечность и надежность. Поэтому целесообразно проектировать механизм так, чтобы он не содержал избыточных связей, если их наличие не требуется по каким-то условиям работы. Так, звено 4 в параллелограммном механизме устанавливают для повышения жесткости механизма и устранения неопределенности движения в некоторых положениях.
. Звено 4 в данном механизме налагает так называемые избыточные связи. Избыточными (пассивными) их называют потому, что их устранение не изменяет числа степеней свободы. Наличие избыточных связей требует высокой точности изготовления механизма. Так, в рассмотренном механизме при невыполнении условия EF=ВС движение либо становится невозможным, т. е. число степеней свободы действительно будет равно нулю, либо перемещение будет происходить за счет деформации звеньев. Деформации создают дополнительные усилия, ухудшают условия работы механизма, уменьшают его долговечность и надежность. Поэтому целесообразно проектировать механизм так, чтобы он не содержал избыточных связей, если их наличие не требуется по каким-то условиям работы. Так, звено 4 в параллелограммном механизме устанавливают для повышения жесткости механизма и устранения неопределенности движения в некоторых положениях.
Так параллелограммный механизм при выходе его из положения, в котором его звенья располагаются вдоль линии AD, может остаться параллелограммным (рис. 19а), либо трансформироваться в антипараллелограмм в зависимости от относительного положения звеньев в кинематических парах, допускаемого зазорами между ними.
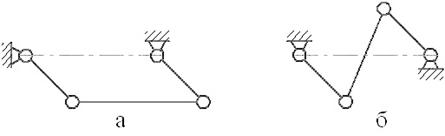
Рис. 19. Возможные положения звеньев после перехода «горизонтального» положения
Число степеней свободы механизма при наличии избыточных связей:
![]() , (6)
, (6)
так как в механизме с избыточными связями число независимых связей равно ![]() . Формула (6) содержит две неизвестные величины (W и q), так как число избыточных связей можно определить лишь путем специального исследования связей. Поэтому в тех случаях, когда величина W может быть получена путем построения положений звеньев механизма, общее число избыточных связей определяется по формуле:
. Формула (6) содержит две неизвестные величины (W и q), так как число избыточных связей можно определить лишь путем специального исследования связей. Поэтому в тех случаях, когда величина W может быть получена путем построения положений звеньев механизма, общее число избыточных связей определяется по формуле:
![]() (7)
(7)
Если, например, в шарнирном четырехзвеннике, изображенном на рис. 18, (звено 4 не учитываем) не обеспечить требуемую параллельность осей вращательных пар, то его можно рассматривать как пространственный. Учитывая, что W=1, получим
![]()
Устранять избыточные связи можно изменением подвижностей отдельных кинематических пар, например, если одну вращательную пару заменить сферической (р3), а другую - цилиндрической (р4).
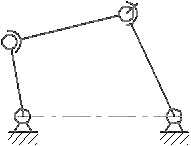
Рис. 20. Шарнирный четырехзвенник без избыточных связей
4. Маневренность манипулятора
При структурном анализе манипулятора (промышленного робота) помимо нахождения числа степеней свободы, определяют также его маневренность. Под маневренностью манипулятора понимается число его степеней свободы при неподвижном захвате. С увеличением маневренности манипулятора повышается возможность обхода им в несвободном пространстве препятствий при выполнении манипуляционных действий.
Если число степеней свободы манипулятора можно определять как по формуле (2), так и по формуле (4), то для определения маневренности можно использовать только формулу (2). Это связано с тем, что кинематическая цепь после фиксации захвата становится замкнутой.
В качестве примера определим маневренность манипулятора, изображенного на рис. 21. Так как при определении маневренности захват 7 считаем неподвижным, то n=6. Кинематические пары, входящие в состав манипулятора - одноподвижные. I и 1V - поступательные, II, IV, V - VII - вращательные. Тогда
![]()

Рис. 21. Структурная схема манипулятора
5. Основные виды механизмов
Из рассмотренных примеров видно, что к основным видам механизмов относятся прежде всего: рычажные, зубчатые, кулачковые. Отдельную группу составляют манипуляторы.
Рычажные механизмы. Из плоских механизмов наибольшее распространение имеют шарнирные механизмы, звенья которых соединены только вращательными парами. На рис.2.2 показан механизм шарнирного четырехзвенника ABCD. В этом механизме четыре звена: стойка О, звенья 1, 2 и 3. Звено 2, образующее кинематические пары только с подвижными звеньями, называется шатуном. Звено 1, совершающее полный оборот вокруг неподвижной оси, называется
кривошипом, а звено 3, совершающее качательное движение,— коромыслом. Шарнирный четырехзвенник может быть трех видов: кривошипно-коромысловый (показан на рис.2.2); двухкривошипный (оба звена 1 и 3 совершают полный оборот); двухкоромысловый (оба звена 1 и 3—качающиеся).
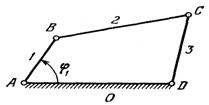
Рис.22 Шарнирный четырехзвенник
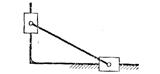
Заменяя в шарнирном четырехзвеннике одну или две вращательные пары на поступательные, получаем механизмы, показанные в табл. 2. С одной поступательной парой можно получить механизмы двух видов. Если стойкой сделать звено, входящее в поступательную пару, то в механизме будет ползун, т. е. звено, которое входит только в низшие кинематические пары и совершает прямолинейно-поступательное движение, а вращающееся звено в зависимости от соотношения длин звеньев будет кривошипом или коромыслом. Соответственно механизм будет называться или кривошипно–ползунным, или коромыслово - ползунным.
Если стойкой сделать звено, входящее в две вращательные пары, то в механизме будет кулиса, т. е. звено, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару. Соответственно механизм называется кулисным.
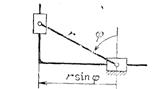
Из четырехзвенной кинематической цепи с двумя смежными поступательными парами можно получить механизмы трех видов: механизм эллипсографа, в котором траектории точек шатуна — эллипсы (окружность и прямая линия считаются частными случаями эллипса), двухкулисный механизм и синусный механизм. В синусном механизме ползун перемещается пропорционально синусу угла поворота кривошипа, если угол между осями поступательных пар равен 90°. Из четырехзвенной кинематической цепи с двумя несмежными поступательными парами получается только один вид механизма — тангенсный механизм, названный так потому, что перемещение ползуна пропорционально тангенсу угла поворота кулисы, если ее направляющая проходит через центры вращательных пар.
Таблица 2
Название кинематической цепи | Название механизма | Схема |
Четырехзвенная кинематическая цепь с одной поступательной парой | Кривошино-ползунный(или коромыслово- ползунный) механизм Кулисный механизм |
|
Четырехзвенная кинематическая цепь с двумя смежными поступательными парами | Механизм эллипсографаДвухкулисный механизм Синусный механизм |
|
Четырехзвенная кинематическая цепь с двумя несмежными поступательными парами | Тангенсный механизм |
|

К одной из разновидностей кулисного механизма относится мальтийский механизм (рис.23), который предназначен для преобразования непрерывного вращения звена 1 во вращение звена 2 с остановками, во время которых звено 2 предохраняется от самопроизвольного поворота соприкасанием цилиндрических поверхностей звеньев 1 и 2. Число остановок равно числу пазов на звене 2, в которые последовательно входит ролик (цевка) звена 1. Во время движения звена 2 механизм по структуре и по кинематическим свойствам тождествен кулисному механизму. Число пазов в мальтийских механизмах—4...20. Свое название механизм получил от сходства его с крестом
мальтийского ордена при числе пазов, равном 4.
Рис.23 Мальтийский механизм
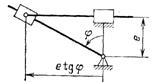
В транспортных машинах для передачи движения от двигателя к «колесной оси» применятся карданный механизм. Он позволяет передавать движение между валами с перекрещивающимися осями (рис.24,а).
При равномерном вращении одного вала другой вал вращается неравномерно. Указанный недостаток устранен в двойной карданной передаче (рис.24,б) 
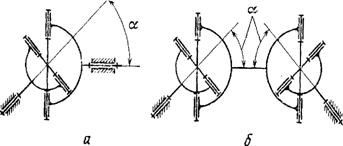
Рис.24 Карданный механизм
Кулачковые механизмы. Кулачком называется звено, которому
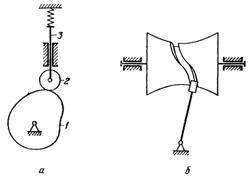
Рис.25 Кулачковые механизмы
принадлежит элемент высшей пары, выполненный в виде поверхности переменной кривизны. Механизм, в состав которого входит кулачок, называется кулачковым механизмом. На рис. 25, а показана схема плоского кулачкового механизма. Кулачок 1, напоминающий по форме сжатый кулак, имеет поверхность переменной кривизны, которая соприкасается с роликом 2, образуя высшую пару. Постоянное соприкасание элементов высшей пары обеспечивается пружиной, помещенной между стойкой и выходным звеном 3.
Кулачковые механизмы могут быть не только плоскими, но и пространственными (рис. 25, б). Разнообразие форм, которые можно придать кулачку, определяет чрезвычайное разнообразие возможных преобразований движения, выполняемых кулачковыми механизмами.
Зубчатые механизмы. Зубчатым механизмом называется механизм, в состав которого входят зубчатые звенья. По ГОСТ 16530—83 зубчатое звено определяется как звено, имеющее выступы (зубья) для передачи движения посредством взаимодействия с выступами другого звена (тоже зубчатого). Каждый зуб может рассматриваться как кулачок, а весь зубчатый механизм—как многократно повторенный кулачковый механизм.
Вращающееся зубчатое звено называется зубчатым колесом. На схеме механизма цилиндрические зубчатые колеса изображаются окружностями,
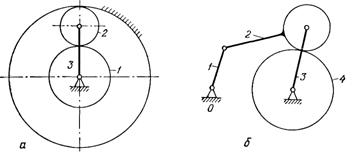
Рис. 26 Зубчатые механизмы
которые перекатываются друг по другу без скольжения. Например, на рис. 26,а показан зубчатый планетарный механизм, в котором колесо 2 (сателлит) вращается вокруг своей оси и одновременно движется вместе со звеном 3 вокруг оси центрального (солнечного) колеса 1, т. е. совершает движение, подобное движению планеты (отсюда название механизма). Иногда зубчатые механизмы комбинируются с шарнирными. На рис. 26, б показан шарнирно-зубчатый (по другой терминологии зубчато-рычажный) механизм, составленный из кривошипно - коромыслового шарнирного четырехзвенника с кривошипом 1 и двух зубчатых колес, одно из которых неподвижно соединено с шатуном 2, а другое (центральное колесо 4) имеет ось вращения, совпадающую с осью вращения коромысла 3.
Фрикционные механизмы. Механизмы, в которых для передачи движения между соприкасающимися звеньями используется трение, называются фрикционными. Например, передача вращения с постоянным отношением угловых скоростей (передаточным отношением) происходит за счет трения цилиндрических поверхностей колес 1 и 2 (рис. 1.7, а). Передаточное отношение можно регулировать в некоторых пределах, если применить лобовую фрикционную передачу, в которой ролик 1 может устанавливаться на различных расстояниях R от оси вращения звена 2 (рис. 1.7, б), соответствующих различным значениям передаточного отношения. Механизмы, в которых передаточное отношение может плавно регулироваться, называются бесступенчатыми передачами.
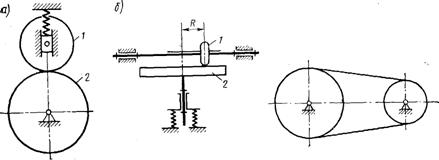
Рис.27 Фрикционные передачи Рис.28 Механизм с гибкими звеньями
Механизмы с гибкими звеньями. Под гибкими звеньями (иногда гибкими связями) понимаются обычно ремни, канаты, цепи, нити, которые охватывают два или более звеньев и устанавливают определенную связь между перемещениями этих звеньев. На рис. 28 показан простейший механизм с гибким звеном, который в отличие от зубчатых и фрикционных механизмов может служить для передачи вращения от одного звена к другому при значительных расстояниях между осями их вращения. В зависимости от типа гибкого звена этот механизм называется ременной, канатной или цепной передачей.
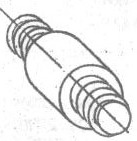
Волновая передача. Еще сравнительно недавно считалось, что деформации звеньев незначительны и не влияют на основные свойства механизмов. Однако в последние годы появились новые механизмы, само действие которых основано на деформации одного или нескольких звеньев. В качестве примера рассмотрим волновую передачу (рис. 29), предназначенную для передачи вращения через герметичную стенку, разделяющую пространства А и Б. Передача может быть как фрикционной, так и зубчатой с большим числом зубьев. Все звенья передачи—жесткие, кроме звена 2, которое называется гибким колесом. Конструктивно гибкое звено 2 выполнено в виде тонкостенного стакана, герметично соединенного со стенкой, разделяющей пространства А и Б. При вращении генератора 1 стакан, деформируясь под действием роликов, принимает форму овала и вызывает перемещение зубьев как колеса 2, так и колеса 3 (жесткого колеса). Таким образом, колесо 3, находясь в пространстве А, получает вращение от зубьев колеса 2, расположенных на внешней стенке стакана, в то время как генератор 1, вызывающий это движение зубьев, вращается внутри стакана. Передача называется волновой потому, что звено 2 в целом остается неподвижным, но при вращении генератора по нему перемещается волна деформации, вызывающая небольшие перемещения зубьев.
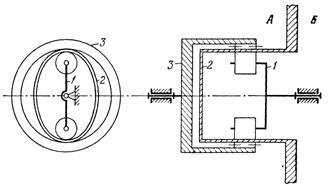
Рис.29 Волновая передача
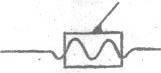
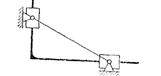
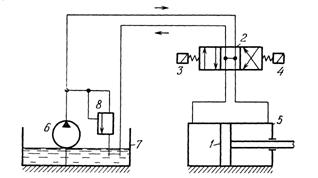 Гидравлические и пневматические механизмы. Гидравлическим называется механизм, в котором преобразование движения происходит посредством твердых и жидких тел. На рис. 30 показана схема гидравлического механизма с применением условных обозначений по ГОСТ 2.781—68 и 2.782—68.
Гидравлические и пневматические механизмы. Гидравлическим называется механизм, в котором преобразование движения происходит посредством твердых и жидких тел. На рис. 30 показана схема гидравлического механизма с применением условных обозначений по ГОСТ 2.781—68 и 2.782—68.
Рис.30 Гидравлический механизм
Механизм предназначен для привода в движение поршня 1 и потому называется гидроприводом. Поршень 1 движется направо или налево в зависимости от положения подвижного элемента распределителя 2. Этот элемент поочередно получает движение от электромагнитов 3 и 4. Если оба электромагнита выключены, то подвижный элемент распределителя 2 занимает среднее положение, показанное на схеме. В этом положении перекрыты обе линии, по которым жидкость может поступать в цилиндр 5. При включении электромагнита 3 его сердечник передвигает подвижный элемент распределителя вправо. Чтобы представить себе действие распределителя в новом положении, надо мысленно передвинуть на место исходной (средней) позиции квадрат, расположенный слева, оставляя линии связи на месте. Тогда правая полость цилиндра 5 соединяется с насосом 6, а левая — с баком 7, и поршень под действием давления жидкости перемещается влево.
При включении электромагнита 4 подвижный элемент распределителя перемещается влево, а поршень—вправо. В схеме предусмотрен переливной клапан 8 для перелива жидкости в бак при повышении се давления.
Схема пневматического механизма имеет аналогичный вид, только насос 6 заменяется источником сжатого воздуха, а вместо соединения с баком выполняется соединение с атмосферой.
Механический регулятор. В качестве примера можно привести регулятор, обеспечивающий поддержание в заданном диапазоне скорости вращения коленчатого вала двигателя внутреннего сгорания, приводящего в движение генератор электрического тока при изменении потребления электроэнергии (рис.31)
В частности, при увеличении потребления электроэнергии увеличивается сопротивление вращению коленчатого вала в результате чего его скорость уменьшается, что нежелательно для нормальной работы генератора. Поэтому с коленчатым валом соединяют регулятор, имеющий чувствительный элемент в виде вращающихся грузов 1 и связанную с ним через систему рычагов ползушку 2, положение которых зависит от скорости вращения коленчатого вала. При уменьшении скорости вращения коленчатого вала чувствительный элемент, соединенный с заслонкой на линии подачи топлива, перемещается, поднимая заслонку 3. В результате подачи топлива в двигатель увеличивается, что приведет к увеличению скорости коленчатого вала. Такой способ регулирования называется регулированием по отклонению.
 Рис. 31 Схема центробежного регулятора
Рис. 31 Схема центробежного регулятора
6. Задание к самостоятельной работе
Самостоятельная работа по составлению структурной схемы механизма двигателя внутреннего сгорания, которая должна помочь закрепить полученные знания, выполняется в следующей последовательности:
1. Определить вид механизма: плоский или пространственный.
2. Найти в механизме стойку.
3. Определить число подвижных звеньев и число кинематических пар.
4. Установить вид пары (высшая, низшая) и число подвижностей для каждой пары.
5. Вычертить структурную схему механизма, на который звенья обозначить арабскими цифрами, а кинематические пары – римскими.
6. Подсчитать число степеней свободы.
Приложение Структурная схемы механизма | ||
| Таблица кинематических пар | |
Номер кинематической пары | Название пары | Звенья, ее составляющие |
I II III IV V VI VII VIII IX X XI XII | Поступ. Вращ. Вращ. Вращ. Вращ. Вращ. Вращ. Поступ. Вращ. Вращ. Вращ. Поступ. | 0-1 1-2 2-3 3-0 3-4 4-0 4-5 5-0 3-6 6-0 6-7 7-0 |
Число подвижных звеньев 7 Число одноподвижных кинематических пар 8 Число двухподвижных кинематических пар 4 | Число степеней свободы механизма
|