
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1. 4 Выбор электродвигателя по частоте вращения его вала
1.4.1 Выбор двигателя для привода с кинематической схемой по рисунку 1а
а) Выписать из таблицы параметров электродвигателей асинхронную (номинальную) частоту вращения ![]() вала всех двигателей выбранной мощности (табл.1).
вала всех двигателей выбранной мощности (табл.1).
Если в приводе используется стандартный червячный редуктор, то выписывать нужно частоту вращения вала только трёх двигателей, т. к. такие редукторы при частоте вращения червяка выше 1500 об/мин не рекомендуется использовать.
б) Определить потребное передаточное число передаточного механизма для каждого из выбранных двигателей: ![]() .
.
в) Для каждого из полученных расчётом передаточных чисел выбрать ближайшее по значению номинальное передаточное число применяемого в приводе типа редуктора ![]() .
.
г) Определить ошибку для каждого выбранного передаточного числа редуктора по формуле
 . (2)
. (2)
Номинальные передаточные числа
Одноступенчатых цилиндрических редукторов типа ЦУ: 1,6; 2; 2,5; 3,15; 4; 5; 6,3;
двухступенчатых цилиндрических редукторов типа Ц2У: 8; 10; 12,5; 16; 20; 25; 31,5; 40;
двухступенчатых цилиндрических соосных редукторов типа Ц2С: 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50;
одноступенчатых червячных редукторов типа Ч: 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50; 63; 80.
Двигатели, для которых не выполняется условие (2), не подходят для использования в приводе. Из двигателей, для которых выполняется это условие, следует выбирать тот, частота вращения которого обеспечивает наименьшую ошибку передаточного числа.
Если по заданию на проектирование передаточный механизм включает в себя червячный редуктор, выбрать окончательно двигатель на этой стадии проектирования невозможно. Поэтому следует зафиксировать частоты вращения вала двигателя и передаточные числа редуктора, для которых выполняется условие (2). Это потребуется при выборе редуктора.
Если не удаётся подобрать двигатель, при котором выполнялось бы условие (2), следует по согласованию с руководителем проектирования изменить выходные параметры привода, тип редуктора или ввести в кинематическую схему дополнительную передачу.
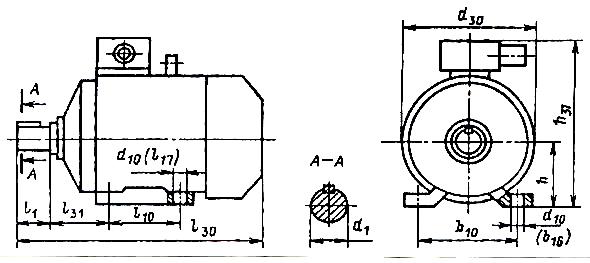
В пояснительной записке нужно привести эскиз выбранного двигателя, его обозначение, размеры и техническую характеристику.
По условиям монтажа двигателя в разрабатываемых приводах подходит двигатель конструктивного исполнения и способа монтажа IM1081![]() машина на лапах с двумя подшипниковыми щитами с одним цилиндрическим концом вала, который может работать при любом направлении конца вала (горизонтальном или вертикальном) (табл. 2).
машина на лапах с двумя подшипниковыми щитами с одним цилиндрическим концом вала, который может работать при любом направлении конца вала (горизонтальном или вертикальном) (табл. 2).
Таблица 2
Габаритные, установочные и присоединительные размеры электродвигателей серии АИР исполнения IM1081
Типоразмер двигателя | Число полюсов | Габаритные размеры, мм | Установочные и присоединительные размеры, мм | ||||||||
|
|
|
|
|
|
|
|
|
| ||
АИР71А, В | 2, 4, 6 | 272,5 | 188 | 170 | 40 | 90 | 46 | 19 | (7/10) | 112 | 71 |
АИР80А | 296,5 | 204,5 | 190 | 50 | 100 | 50 | 22 | (10/12) | 125 | 80 | |
АИР80В | 320,5 | ||||||||||
АИР90L | 337 | 224,5 | 210 | 125 | 56 | 24 | 140 | 90 | |||
АИР100S | 360 | 246,5 | 240 | 60 | 112 | 63 | 28 | (12/16) | 160 | 100 | |
АИР100L | 391 | 140 | |||||||||
АИР112М | 2,4 | 435 | 285 | 246 | 80 | 140 | 70 | 32 | 12 | 190 | 112 |
АИР112МА | 6,8 | ||||||||||
АИР112МВ | 6,8 | ||||||||||
АИР132S | 4,6,8 | 460 | 325 | 288 | 80 | 140 | 89 | 38 | 12 | 216 | 132 |
АИР132М | 2 | 498 | 178 | ||||||||
АИР160S | 2 | 630 | 385 | 334 | 110 | 108 | 42 | 15 | 254 | 160 | |
АИР160S | 4,6,8 | 48 | |||||||||
АИР160М | 6,8 | 660 | 210 | ||||||||
АИР180М | 8 | 680 | 375 | 241 | 121 | 55 | 279 | 180 |
* Размеры указаны в миллиметрах.
1.4.2 Выбор двигателя для приводов с кинематической схемой
по рисунку 1б или 1в
а) Определить максимальное и минимальное значения передаточ - ного числа, возможные для заданной схемы привода: ![]() ;
; ![]() . Здесь
. Здесь ![]() наибольшее и наименьшее значение передаточного числа редуктора заданной конструкции;
наибольшее и наименьшее значение передаточного числа редуктора заданной конструкции;  наибольшее и наименьшее значение передаточного числа дополнительной передачи (ременной или цепной) соответственно. Целесообразно принимать
наибольшее и наименьшее значение передаточного числа дополнительной передачи (ременной или цепной) соответственно. Целесообразно принимать ![]() = 3;
= 3; ![]() = 1.
= 1.
б) Определить максимальную и минимальную потребную частоту вращения вала двигателя ![]() ;
; ![]() .
.
в) Выбрать электродвигатель потребной мощности (см. пп. 1.3) с асинхронной частотой вращения вала ![]() , удовлетворяющей условию
, удовлетворяющей условию
![]() . (3)
. (3)
Если условию (3) удовлетворяют несколько двигателей, следует принять для использования в приводе двигатель с большей частотой вращения с целью получения меньших габаритов и массы привода.
г) Определить потребное передаточное число привода применительно к выбранному двигателю ![]() .
.
д) Выбрать передаточное число стандартного редуктора заданного типа ![]() и определить передаточное число дополнительной передачи привода
и определить передаточное число дополнительной передачи привода
 .
.
Значение передаточного числа редуктора следует принимать максимально близкое к значению потребного передаточного числа привода с целью получения наименьшего значения передаточного числа дополнительной передачи.
1.5 Рекомендации по проектированию
дополнительных передач привода
Проектирование цепных передач для приводов цепных конвейеров с кинематической схемой (рис. 1в).
Для таких приводов целесообразно выполнять ведомые звёздочки передачи примерно одного диаметра с тяговыми звёздочками и барабаном. По этим соображениям получаем
 ;
;  ,
,
где z – число зубьев тяговой звёздочки конвейера;
![]() – число зубьев ведомой звёздочки цепной передачи;
– число зубьев ведомой звёздочки цепной передачи;
p – шаг тяговой цепи; ![]() шаг цепи цепной передачи.
шаг цепи цепной передачи.
Число зубьев ведомой звёздочки передачи ![]() . Здесь
. Здесь ![]() число зубьев ведущей (малой) звёздочки передачи, которое рекомендуется принимать равным 15 или 17;
число зубьев ведущей (малой) звёздочки передачи, которое рекомендуется принимать равным 15 или 17; ![]() передаточное число передачи (см. пп. 1.4):
передаточное число передачи (см. пп. 1.4):  .
.
Тогда шаг цепи цепной передачи  или
или ![]() .
.
Полученное расчётом значение шага цепи округляется до ближайшего меньшего стандартного значения ![]() .
.
Значение подводимого к валу рабочего органа крутящего момента
(см. пп.1.6) связано с параметрами цепной передачи зависимостью
 .
.
Отсюда окружное усилие на ведомой звёздочке цепной передачи, кН
 .
.
Определяется разрывное усилие цепи и по нему выбирается рядность цепи при известном её шаге ![]() . Здесь
. Здесь ![]() коэффициент динамичности:
коэффициент динамичности: ![]() для ленточных конвейеров,
для ленточных конвейеров, ![]() – для цепных конвейеров; S – коэффициент запаса прочности (выбирается из приведенной таблицы).
– для цепных конвейеров; S – коэффициент запаса прочности (выбирается из приведенной таблицы).
| 19,05 | 25,4 | 31,75 | 38,1 | 44,45 | 50,8 |
Коэффициент запаса прочности цепей S | ||||||
50 100 200 | 7,2 7,6 8,0 | 7,3 7,8 8,3 | 7,4 7,8 8,6 | 7,5 8,0 8,9 | 7,6 8,1 9,2 | 7,6 8,3 9,5 |
*
![]() частота вращения ведущей звёздочки передачи.
частота вращения ведущей звёздочки передачи.
Параметры приводных роликовых цепей даны в прил. I.
Проектирование клиноременных передач изложено в работе ![]() .
.
Если в приводе используется двухступенчатый редуктор оригинальной конструкции, передаточное число редуктора  распределяется между быстроходной
распределяется между быстроходной ![]() и тихоходной
и тихоходной ![]() ступенями по графикам, показанным на рисунке 2.
ступенями по графикам, показанным на рисунке 2.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 7 8 9 10 11 12 |
