

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
А.15.О. СОЗДАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ РАДИАЛЬНЫМ
АКТИВНЫМ МАГНИТНЫМ ПОДШИПНИКОМ
НА БАЗЕ КОМПЛЕКТУЮЩИХ NI.
, ,
Орловский Государственный Технический Университет, г. Орел, Наугорское шоссе 29, , *****@***ru
1. Введение
С увеличением роста частот вращения роторов транспортных и энергетических машин и повышением требований к условиям работы их подшипниковых узлов возникает острая необходимость создания опорных узлов, позволяющих воспринимать значительные динамические нагрузки, работающих без применения смазочных материалов и осуществляющих контроль движения ротора. Одним из решений данной проблемы является активный магнитный подшипник (АМП). Он не нуждается в системе смазки, полностью исключает присутствие механического контакта, а так же может работать при условиях высоких и низких температур, вакуума, агрессивных средах и т. д.
Перечисленные достоинства АМП делают их весьма перспективными во многих областях техники: турбины и насосы в вакуумной и криогенной технике, машины для сверхчистых технологий, машины и приборы для ядерных и космических установок, гироскопы, роботы, точные измерительные приборы и т. д.
АМП является сложной системой, для стабилизации движения ротора в которой необходимо достаточно точное и быстрое оборудование. В частности необходим точный контур управления с быстрым откликом управляющего сигнала на изменение системы (рисунок 1).
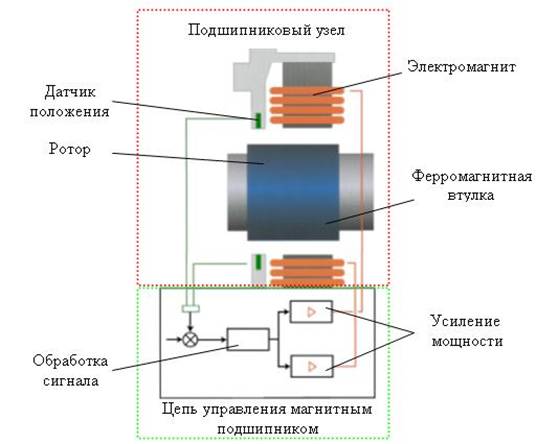
Рис. 1 – Конструкционная схема АМП и системы стабилизации ротора
Схема управления предполагает обработку сигнала с датчиков (аналоговым или цифровым способом) и выработку управляющего сигнала, усиленного до необходимого уровня.
Развитие компьютерной техники позволяет объединить в один комплекс измерительные приборы, контроль технологических параметров и управление физической и аппаратной частями модели.
2. Результаты работы
Коллективом авторов был спроектирован и изготовлен экспериментальный стенд по исследованию поведения ротора в АМП (рисунок1).

Рис. 1 – Экспериментальная установка по исследованию АПМ
Данная установка с АМП предполагает частичную левитацию вала в электромагнитном поле, левый конец вала отцентрирован в подшипнике качения и благодаря посадке с натягом удерживает вал от осевых перемещений. Подшипник скольжения является страховочным устройством, удерживая вал от падения на сердечник при отключении АМП. Подача крутящего момента на вал осуществляется посредством привода от электродвигателя через механическую муфту (возможен вариант с электромагнитной муфтой, управление которой осуществляется программно).
Индуктивные датчики перемещения, контролирующие положение вала, устанавливаются в специальный корпус, их выставление относительного нулевой точки осуществляется с помощью ПО LabVIEW.
Установка выполнена по модульному принципу, так добавляя стандартные корпуса с нужными узлами, мы расширяем при этом сложность построенной модели. Имеется возможность установки тахометрических датчиков, что в свою очередь позволяет программно контролировать частоту вращения вала и непосредственно управлять частотой вращения электродвигателя.
3. Оборудование
Информационно измерительная система и контур управления представлены на рисунке 2.
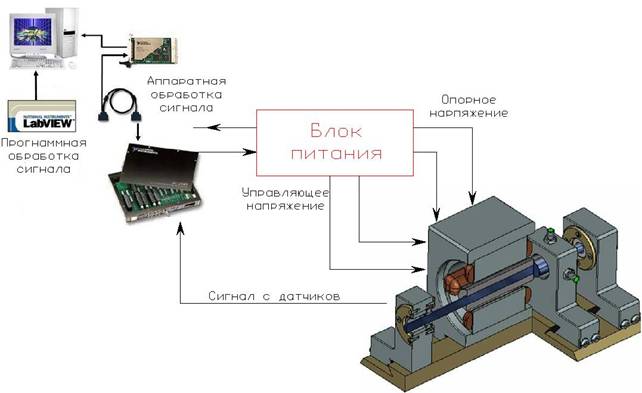
Рис. 2 – ИИС и контур управления АМП
Питание АМП осуществляется методом подачи на два полюса (нижний и правый) опорного напряжения и стабилизирующего на два других (верхний и левый).
При подаче напряжения на электромагнит датчики перемещения вырабатывают сигнал, информирующий о положении ротора. Сигнал поступает в блок согласования сигналов SC 2345, далее сигнал через DAQ плату (АЦП-ЦАП) поступает в программное обеспечение (ПО) LabVIEW, где обрабатывается по ранее заложенному принципу. При показаниях отклонения ротора от положения осевой центровки (сигнал с датчиков), из ПО на блок согласования поступает управляющий сигнал, который, проходя через блок питания усиливается до нужной величины и стабилизирует положение ротора.
4. Преимущества технологии National Instruments
Алгоритм управления АМП был разработан в среде инженерного программирования LabVIEW (рисунок 3). Этот программный продукт позволил гибко отладить систему стабилизации ротора а так же дал возможность одновременно управлять частотой вращения электродвигателя, включением электромагнитной муфты.
Сигнал управления положение ротора обрабатывался с применением программного ПИД-регулятора, коэффициенты для которого рассчитывались по методике, изложенной в [1], в основе которой лежит использование обратных задач динамики к подвесу с управлением по напряжению:
![]()
где g1, …, g5 коэффициенты усиления обратных связей соответственно по перемещению, скорости, току, интегралу от перемещения и ускорению.
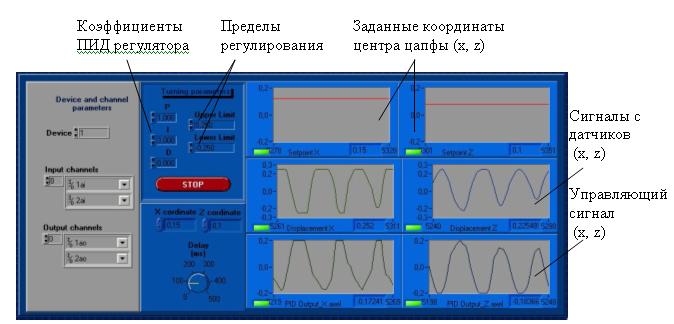
Рис. 3 – Общий вид пользовательского интерфейса подпрограммы управления магнитным подвесом
Хотя программа управления магнитным подвесом ротора и представляет законченный самостоятельный блок, использоваться она будет как часть информационно-измерительной системы всего стенда. Помимо управления активным магнитным подшипником система осуществляет сбор данных с датчиков перемещения, контролирующих положение цапфы вала в радиальном зазоре, а также тахометрических датчиков.
Подпрограмма управления магнитным подвесом позволяет осуществлять реконфигурирование аппаратной части; задавать: коэффициенты ПИД-регулятора, верхний и нижний предел регулирования, координаты центра цапфы вала, время опроса датчиков; включать/выключать графическое сопровождение процесса регулирования (регулирование в реальном времени предъявляет высокие требования к быстродействию, вследствие чего, процесс визуализации может снизить быстродействие системы в целом) [2].
Помимо вышеотмеченных возможностей планируется осуществлять моделирование динамических и статических нагрузок на ротор на активных магнитных подшипниках.
Литература
1. ёв Активные магнитные подшипники: Теория, расчет, применение. – СПб.: Политехника, – 2003. – 206 с.
2. Дж. Тревис LabVIEW для всех. – М.:ДМК, 2003. – 544с.
