


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
А. И. КЛИМЕНКО
Научные руководители – А. А. КРАСНЮК, к. т.н., доцент,
В. Я. СТЕНИН, д. т.н., профессор
Национальный исследовательский ядерный университет «МИФИ»
СИСТЕМА УПРАВЛЕНИЯ И ОБРАБОТКИ ДАННЫХ
ДАТЧИКА ИДЕНТИФИКАЦИИ ЛЕТУЧИХ АНАЛИТОВ
На примере датчика для идентификации и анализа летучих аналитов рассмотрена система управления и обработки данных, позволяющая производить непрерывный мониторинг и обеспечивающая надежную работу прибора.
В МИФИ на кафедре «Электроника» при участии сотрудников ЦФРАН был разработан и изготовлен прототип датчика для идентификации летучих аналитов. Датчик представляет собой систему, включающую фоточувствительный преобразователь на КМОП-матрице, устройство сопряжения с ЭВМ с соответствующим программным обеспечением, оптоволоконный кабель со светодиодом для подсветки и хемочип с сенсорными элементами.
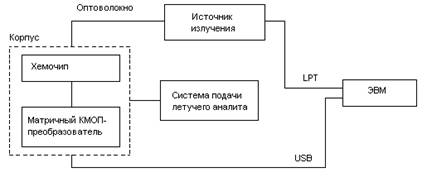
Рис. 1. Структурная схема датчика
Работа датчика построена на основе измерения динамических параметров флуоресценции оптических сенсорных материалов, а именно интегральной интенсивности флуоресценции [1]. Алгоритм формирования выходных данных основан на изменении параметров флуоресценции при взаимодействии летучих веществ и сенсорного элемента. Выходной информацией является зависимость разности интенсивностей изменившейся флуоресценции и исходной флуоресценции (без влияния летучего аналита) от времени. Эти данные сравниваются с калибровочными, что позволяет идентифицировать летучий аналит и его концентрацию. Калибровочные данные получают предварительно путем проведения экспериментов с различными веществами.
Для прототипа датчика была разработана система управления и обработки данных, которая анализирует информацию, поступающую от матричного фотопреобразователя, а также контролирует работу датчика.
Одной из главной задач системы является осуществление синхронизации между работой матричного фотопреобразователя и излучением светодиода. Суть синхронизации заключается в том, чтобы возникающая флуоресценция и вспышка светодиода попадали в одну и ту же часть (центральную) каждого кадра, фиксируемого фотопреобразователем.
Система синхронизации была реализована путем включения в стандартный граф видео-файла (источник изображения – фильтр рендеринга) дополнительного вспомогательного фильтра SampleGrabber, который работает следующим образом: вначале происходит формирование первичного кадра, который передается по цепочке в промежуточный фильтр. После этого начинает формироваться второй кадр, первичный при этом поступил в SampleGrabber. Этот фильтр отслеживает факт прихода каждого кадра и сообщает об этом боковому потоку(Thread), который выполняется параллельно с основным потоком. Как только сообщение от фильтра было получено, тут же включается светодиод, вспышка которого попадает в заданную область второго кадра, который только формируется. Затем процесс продолжается заново.
Разработка программного обеспечения для датчика производилась в среде Microsoft Visual Studio 2005 при использовании различных компонентов библиотеки DirectShow[2].
Корректная работа различных составляющих системы управления и обработки данных датчика идентификации летучих аналитов подтверждена серией экспериментов.
Список литературы
1. , Юу Ф. Т.С. Когерентная фотоника М.: БИНОМ. Лаборатория знаний. 20с.
2. Programming Microsoft DirectShow for Digital Video & TV, Ms Press, 2003.
