
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.01:531
СТ. Н.БЪЧВАРОВ, В. Д.ЗЛАТАНОВ, С. Г.ДЕЛЧЕВА-АТАНАСОВА
ДИНАМИКА МАШИННОГО АГРЕГАТА С УПРУГИМ ВАЛОМ И КВАДРАТИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА (часть І)
1.Введение
В разных отраслях современной индустрии широко распространены машинные агрегаты с фрикционной муфтой и зубчатой передачей (редуктором) между двигателем и исполнительным механизмом. Вопросы их динамики имеют большое значение, из-за повышения производительности современных машин. Это приводит к повышению динамических нагрузок отдельных звеньев машинного агрегата, исследование которых является одним из необходимых условий для создания более надежных машин.
Как было отмечено в [2], переходные процессы (разбег и торможение) мало исследованы, при этом механические системы (модели) обычно рассматриваются отдельно от привода и характера рабочих нагрузок.
2.Цель исследования
Целью настоящего исследования является изучением режимов разбега и соответствующих динамических нагрузок в машинных агрегатах со сцепными фрикционными муфтами, зубчатой передачей (редуктором), упругим валом и исполнительным механизмом с квадратической механической характеристикой.
3.Динамическая модель
Динамическая модель машины (рис.1), как и в [2], состоит из асинхронного электродвигателя (М) с постоянным моментом инерции ![]() ; зубчатой передачи
; зубчатой передачи
|
Рис.1. Модель агрегата |
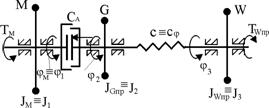
(G), имеющей постоянный (приведенный к валу электродвигателя) момент инерции ![]() и постоянное передаточное отношение
и постоянное передаточное отношение ![]() ; сцепной муфты (
; сцепной муфты (![]() ) между двигателем и зубчатой передачей с постоянным моментом трения
) между двигателем и зубчатой передачей с постоянным моментом трения  при буксовании в зацепленном положении; постоянной муфтой (
при буксовании в зацепленном положении; постоянной муфтой (![]() ) между зубчатой передачей (G) и исполнительным механизмом (W) ( она постоянно включена и поэтому не изображена на рис.1).
) между зубчатой передачей (G) и исполнительным механизмом (W) ( она постоянно включена и поэтому не изображена на рис.1).
В настоящем исследовании принимается, что исполнительный механизм (W) – это механизм ротационого типа с постоянным моментом инерции ![]() и квадратической механической характеристикой
и квадратической механической характеристикой ![]() , где
, где ![]() -момент сил сопротивления исполнительного механизма;
-момент сил сопротивления исполнительного механизма; ![]() -постоянная величина,
-постоянная величина, ![]() -угловая скорость ротора исполнительного механизма.
-угловая скорость ротора исполнительного механизма.
Приводя момент инерции исполнительного механизма и момент сил сопротивления к валу электродвигателя, получаем
| (1) |
Предполагается, что электродвигатель (М) раскрутился предварительно до своей синхронной угловой скорости ![]() , после чего происходит мгновенное включение фрикционной муфты
, после чего происходит мгновенное включение фрикционной муфты ![]() и увеличение созданного момента трения
и увеличение созданного момента трения ![]() от нуля до его максимального значения
от нуля до его максимального значения ![]() =const. На основе этого предположения считается, что асинхронный электродвигатель работает на наклонном участке механической характеристики, аппроксимируемом линейной зависимостью движущего момента от угловой скорости
=const. На основе этого предположения считается, что асинхронный электродвигатель работает на наклонном участке механической характеристики, аппроксимируемом линейной зависимостью движущего момента от угловой скорости
| (2) |
где постоянные величины ![]() и
и ![]() определенны техническими данными электродвигателя.
определенны техническими данными электродвигателя.
Будем считать, что зазоры в кинематической цепи отсутствуют, вал, связывающий электродвигатель и муфту, абсолютно жесткий, а вал, связывающий редуктор с исполнительным механизмом имеет линейную упругую характеристику с жесткостью на кручение ![]() .
.
Движение агрегата происходит в два этапа:
1) этап пробуксовки муфты, во время которой угловые скорости валов сцепной муфты стремятся к выравнению;
2) этап совместного раскручивания, на котором оба вала ускоряются совместно до установления рабочей (стационарной) угловой скорости агрегата.
4.Дифференциальные уравнения движения на этапе пробуксовки муфты
Движение частей агрегата на этапе пробуксовки описывается системой дифференциальных уравнений
| (3) |
При введении новых переменных ![]() и
и ![]() :
:
| (4) |
| (5) |
система (3) без первого уравнения записывается в виде
| (6) |
при этом
| (7) |
| (8) |
5.Определение закона движения на этапе пробуксовки муфты
Первое уравнение системы (3) представляем в виде
| (9) |
где  .
.
Зададим начальные условия движения:
| (10) |
Учитывая (10) из уравнении (9), находим
| (11) |
| (12) |
 ,
, .
.Решение системы дифференциальных уравнений (6) будем искать методами последовательных приближений и малого параметра.
Расмотрим сначала первое уравнение системы (6). Исходя из (8), для ![]() находим:
находим:
| (13) |
 .
.В первом приближении принимаем
| (14) |
что соответствует абсолютно жесткому валу, связывающему редуктор с исполнительным механизмом. Тогда первое дифференциальное уравнение из (6) примет вид:
| (15) |
где  .
.
Решение этого дифференциального уравнения, учитывая начальные условия (10), находим в форме[6]:
| (16) |
Подставляя (14) во второе уравнение системы (6) и учитывая (16), имеем
| (17) |
где  .
.
Решение дифференциального уравнения (17) с учетом нулевых начальных условий (10) выражается интегралом Дюамеля
| (18) |
 ,
,где  ,
, .
.
Таким образом, решение (17) можно представить как сумму двух интегралов
| (19) |
| (20) |
 ,
, .
.Интеграл (20) вычисляем следующим способом. Функцию  представляем в виде ряда [3]:
представляем в виде ряда [3]:
| (21) |
Ряд (21) сходится, если выполнено условие ![]() , откуда
, откуда
|
где ![]() – время пробуксовки муфты.
– время пробуксовки муфты.
Сохраняя первые три члена разложения (21), находим
| (22) |
Четная функция ![]() , представлена рядом (22), удовлетворяет условиям Дирихле и может быть представлена в виде суммы ряда Фурье [3,5]:
, представлена рядом (22), удовлетворяет условиям Дирихле и может быть представлена в виде суммы ряда Фурье [3,5]:
| (23) |
причем  .
.
Здесь
|

а
|
где  .
.
Получаем выражение
| (24) |
позволяющее найти приближеное значение интеграла (20) :
|

где n-число учтенных членов разложения функции ![]() в ряд Фурье.
в ряд Фурье.
Таким образом, решение дифференциального уравнения (17), примет вид
| (25) |
откуда
| (26) |
где  ,
,
 ,
,  ,
, ![]() .
.
В первом приближении для угловых скоростей валов ![]() , учитывая (7), (8), (16), (26), имеем
, учитывая (7), (8), (16), (26), имеем
| (27) |
| (28) |
Решение системы дифференциальных уравнений (6) во втором приближении найдено следующим образом. Учитывая (13) и (26), первое уравнение системы (6) записываем в форме
| (29) |

причем  ,
, ![]() – малый положительный параметр, для которого принято
– малый положительный параметр, для которого принято ![]() ,
, ![]() ,
,
 , а коэффициенты
, а коэффициенты ![]() получены из равенства
получены из равенства ![]() .
.
Уравнение (29) таким образом приведено в квазилинейном виде.
Решение дифференциального уравнения (29) ищем в виде ряда по степеням малого параметра с точностью до членов, содержащих ![]() в первой степени включительно:
в первой степени включительно:
| (30) |
Подставляя соотношение (30) в уравнение (29) и приравнивая коэффициенты при одинаковых (нулевой и первой) степенях малого параметра ![]() в правой и левой частях уравнения, получаем
в правой и левой частях уравнения, получаем
| (31) |
| (32) |

Уравнение (31) запишем в виде
|
где  . Решение его аналогично решению уравнения (15):
. Решение его аналогично решению уравнения (15):
| (33) |
Введем обозначения:
 ,
, 
и сделаем замену переменной
| (34) |
Тогда дифференциальное уравнение (33) примет вид
|
а его решение будет [4]:
| (35) |
причем  .
.
Учитывая начальные условия (10), а также (30), (33), (34), находим во втором приближении
| |
| (36) |
|
 ,
,
где 




Второе уравнение системы (6), учитывая (13), записываем в виде:
| (37) |
где ![]() – малый положительный параметр, для которого принято
– малый положительный параметр, для которого принято ![]() ,
, ![]() ,
,
 .
.
Решение диференциального уравнения (37) ищем в виде ряда по степеням малого параметра с точностью до членов, содержащих ![]() в первой степени включительно:
в первой степени включительно:
| (38) |
Подставляя соотношение (38) в уравнение (37) и приравнивая коэффициенты при одинаковых (нулевой и первой) степенях малого параметра ![]() в правой и левой частях уравнения, получаем
в правой и левой частях уравнения, получаем
| (39) |
| (40) |
Решение уравнения (39) при начальных условиях (10):
| (41) |
Подставляя решение (41) в правую часть уравнения (40), имеем:
| (42) |
Решение дифференциального уравнения (42) при нулевых начальных условиях (10) может быть представлено в виде интеграла Дюамеля
| (43) |
 ,
,где  , .
, .
Решение (43) можно представить как сумму интегралов:
| (44) |
причем 


![]() ,
,
|
|
|


 ,
,где  - коэффициенты разложения в ряд Фурье нечётной функции (21). Интеграл
- коэффициенты разложения в ряд Фурье нечётной функции (21). Интеграл ![]() вычислен методом, аналогичным использованному при вычислении интеграла (20), при этом для определения
вычислен методом, аналогичным использованному при вычислении интеграла (20), при этом для определения ![]() , найдено аналитическое выражение интегралов вида:
, найдено аналитическое выражение интегралов вида:
| (45) |
Формулы (38)-(45) определяют ![]() и
и ![]() во втором приближении.
во втором приближении.
Функции  во втором приближении определены, а это позволило определить изменение угловых скоростей
во втором приближении определены, а это позволило определить изменение угловых скоростей ![]() согласно формулам (7), (8), а также крутящий момент
согласно формулам (7), (8), а также крутящий момент ![]() на упругом валу.
на упругом валу.
|
6.Пример
Полученные результаты проиллюстрированы численным примером на основе технической характеристики многофункционального прессавтомата с перенастройкой MPA-1PM, производства ТИКЕ-АД, Пловдив, Болгария. Дла автомата: ![]() ,
, ![]() ,
,![]() ,
, ,
, . Для асинхронного электродвигателя с короткозамкнутым ротором AM-132-M-6:
. Для асинхронного электродвигателя с короткозамкнутым ротором AM-132-M-6:  ,
,  и
и  . Коэффициент момента сопротивления
. Коэффициент момента сопротивления ![]() , а жесткость вала
, а жесткость вала ![]() .
.
Изменение угловых скоростей  и нагрузки
и нагрузки ![]() зубчатой передачи, определены получеными в работе формулами, показаны на рис.2–5. Вместе с тем, с целью сравнения, построены и графики этих величин, определенные численным интегрированием системы (3) с помощью многошагового метода Хеминга четвертого порядка. Из приложенных рисунков видно хорошее совпадение результатов, полученных двумя методами.
зубчатой передачи, определены получеными в работе формулами, показаны на рис.2–5. Вместе с тем, с целью сравнения, построены и графики этих величин, определенные численным интегрированием системы (3) с помощью многошагового метода Хеминга четвертого порядка. Из приложенных рисунков видно хорошее совпадение результатов, полученных двумя методами.
|
Рис.2. Изменение угловых скоростей Рис.3 Изменение угловых скоростей |
|
Рис4. Изменение крутящего момента |
СПИСОК ЛИТЕРАТУРЫ
1. , Асимптотические методы в теории нелинейных колебаний. М.: Физматгиз, 1963.-463с.
2. Бъчваров Ст. Н., , Делчева-, Г. Динамика машинного агрегата с упругим валом и линейной характеристикой исполнительного мехенизма. [Электронный ресурс]: Электрон. статья (1 файл KБ) // Теория мехенизмов и машин, вып. 1(3) том 2, 2004.-СПб: СПбГПУ, 2004.-Загл. с титул. экрана.-Электрон. журн.-Свободный доступ из сети Интернет.-http://tmm. *****/journal.
3. , Таблицы интегралов, сумм, рядов и произведений. М.: Наука, 1971.-1108с.
4. , Справочник по нелинейным дифференциальным уравнениям (приложение в механике, точные решения). М.: Наука, 1993.-462с.
5. Т. Корн. Справочник по математике для научных работников и инженеров. М.:-Наука, 1973.-832с.
6. , И. Курс теоретической механики, часть ІІ. М.:ОГИЗ, 1948.-580с.
Поступила в редакцию 23.08.2004
После доработки 24.01.2005
