
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Объем - количество бит информации, производимой каждым источником;
λ - плотность потока поступления заявок на обслуживание от источников информации.
Тип - тип канала связи (C – симплексный).
Рош - вероятность ошибки при передаче одного двоичного символа.
Кп - категория помехоустойчивости системы.
Примечание – данные о коде, используемом при передаче данных.
В соответствии с заданными требованиями нужно:
1) определить эффективно передаваемую полосу частот ∆F и оптимальную скорость модуляции Bопт при использовании сигналов ЧМ, ФМ и АМ с двумя боковыми полосами. После чего выбрать значение В из стандартного ряда (ГОСТ ) и вид модуляции, обеспечивающий наибольшую скорость передачи.
2) выбрать формат сообщения и определить среднее время запаздывания информации.
3) разработать структурные схемы и алгоритмы функционирования СПД.
4) реализовать программно один из узлов СПД.
1.5 Вывод к главе 1
В этой главе была рассмотрена классификация систем передачи данных, способы передачи данных и методы фазирования, а также рассмотрены основные виды кодов, использующихся для передачи алфавитно-цифровой информации.
В данном курсовом проекте будет разработана СПД, использующая для передачи данных международный телеграфный код МТК-5. В устройстве защиты от ошибок данной СПД будет использовано кодирующее и декодирующее устройство циклического кода. Тип канала связи симплексный. Это означает, что информация в данной системе сможет передаваться лишь в одном направлении.
2. Расчет параметров и характеристик
2.1 Определение эффективно передаваемой полосы частот, оптимальной скорости передачи.
Качество передачи дискретной информации зависит от частотных характеристик канала, причём тем в большей степени, чем выше скорость передачи. К частотным характеристикам канала относятся амплитудно-частотная (АЧХ) и фазочастотная (ФЧХ) характеристики. Построим данные характеристики, в соответствии с заданным вариантом, исходя из таблицы 1.1.
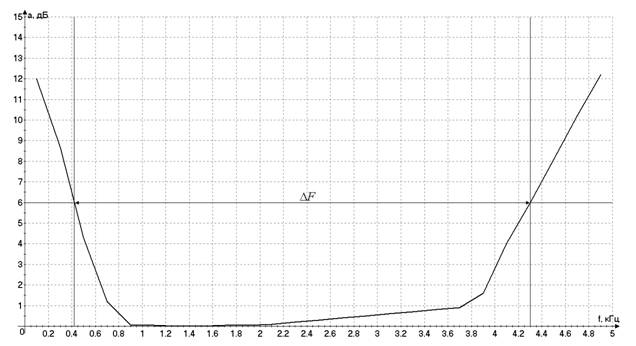
Рисунок 2.1 – Характеристика остаточного затухания
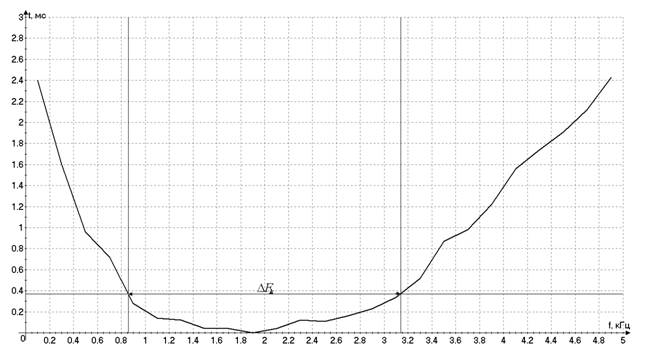
Рисунок 2.2 – Характеристика группового времени прохождения
Для оценки фазочастотных искажений в канале пользуются характеристикой группового времени прохождения (ГВП), которая представляет собой производную ФЧХ по частоте
 (2.1)
(2.1)
Минимально необходимая полоса частот определяется по формуле:
 (2.2)
(2.2)
где В – скорость модуляции, определяемая для двухпозиционных видеосигналов как
![]()
![]() (2.3)
(2.3)
При передаче модулированных сигналов (ЧМ, АМ, ФМ) минимально необходимая полоса частот увеличится вдвое, так как необходимо передавать верхнюю и нижнюю полосы частот:
 (2.4)
(2.4)
![]() Предельная скорость передачи в этом случае
Предельная скорость передачи в этом случае
 (2.5)
(2.5)
![]() Для сохранения удовлетворительной формы посылок на выходе канала на практике скорость модуляции Впр выбирают несколько меньше, чем предельно допустимые Вmax, а именно:
Для сохранения удовлетворительной формы посылок на выходе канала на практике скорость модуляции Впр выбирают несколько меньше, чем предельно допустимые Вmax, а именно:
 (2.6)
(2.6)
при использовании сигналов ЧМ, АМ, и ФМ с двумя боковыми полосами.
При этом для определения ширины полосы пропускания ∆Fк используют частотную характеристику неравномерности остаточного затухания канала ∆а(f). Если затухание нарастает плавно и симметрично относительно несущей частоты, то граница полосы пропускания определяется на уровне затухания 6дБ, когда в полосе пропускания имеются нечетно-симметричные и колебательные отклонения затухания, то они не должны превосходить 1,75-2,6 дБ.
Характеристика остаточного затухания нарастает плавно и симметрично относительно несущей частоты, поэтому граница полосы пропускания определяется на уровне затухания 6 дБ. Отметим на графике ∆а=6 дБ. Ширина полосы пропускания канала равна.
∆Fк = 4.3 – 0.42 = 3.88 кГц.
Максимальная скорость модуляции при использовании АМ, ЧМ, ФМ с двумя боковыми полосами определяем по формуле (2.6):
Bпр = 0,7*3.88*103 = 2716 Бод.
Для того, чтобы межсимвольные помехи (эхо-сигналы) Uэхо, возникающие за счет нелинейности частотной характеристики ГВП, не превышали допустимой величины Uэхо≤(0,1-0,2)U0, где U0 – амплитуда основного сигнала, необходимо, чтобы неравномерность характеристики ГВП Δτгр(f) не превышала: для четно-симметрической и колебательной характеристик ГВП:
 (2.7)
(2.7)
для нечетно-симметрической зависимости ГВП:
![]()
![]() (2.8)
(2.8)
Следовательно, с учетом ограничений, при расчете скорости передачи или выборе полосы пропускания канала необходимо проверить, удовлетворяет ли неравномерность характеристики ГВП в выбранной полосе ∆Fk условию ![]() . Если не удовлетворяет, то необходимо уменьшить скорость передачи либо откорректировать частотную характеристику ГВП.
. Если не удовлетворяет, то необходимо уменьшить скорость передачи либо откорректировать частотную характеристику ГВП.
Так как характеристика группового времени прохождения имеет чётко-симметричный характер, то допустимая неравномерность ГВП в этом случае во всей полосе пропускания вычисляется по формуле (2.7):
∆τгрдоп ≤ 1/2716 = 0,37 * 10-3с.
Отметим на рисунке 2.2 полученное значение ![]() . При этом полоса частот ∆Fк=3.14-0.86=2.28 кГ, что несколько меньше рассчитанного выше. Следовательно, необходимо провести коррекцию частотной характеристики либо уменьшить скорость передачи.
. При этом полоса частот ∆Fк=3.14-0.86=2.28 кГ, что несколько меньше рассчитанного выше. Следовательно, необходимо провести коррекцию частотной характеристики либо уменьшить скорость передачи.
Уменьшим скорость передачи.
Для нахождения оптимальной скорости передачи Вопт необходимо решить графически систему двух уравнений, одно из которых задано зависимостью вида ![]() , а второе представлено графиком
, а второе представлено графиком ![]() . Полагая, что
. Полагая, что ![]() , для соответствующих значений ∆Fк, построим зависимость В=ψ(∆Fk).
, для соответствующих значений ∆Fк, построим зависимость В=ψ(∆Fk).
Составим таблицу 2.1 для построения графика:
Таблица 2.1 – Характеристики для нахождения оптимальной скорости
∆τгр, мс | ∆Fк, кГц | Bпр, Бод |
0.2 | 1.8 | 5000 |
0.25 | 2 | 4000 |
0.3 | 2.1 | 3300 |
0.4 | 2.3 | 2500 |
0.5 | 2.47 | 2000 |
0.55 | 2.53 | 1800 |
0.6 | 2.6 | 1700 |
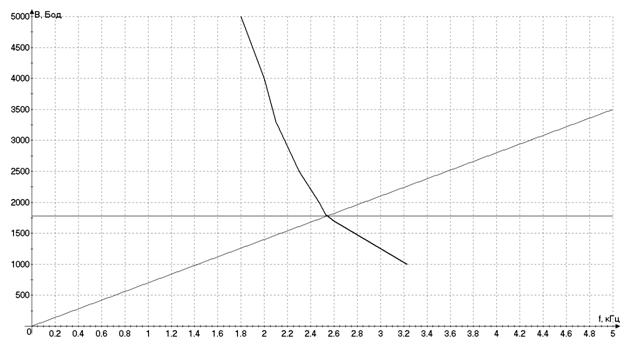
Рисунок 2.3 – Нахождение оптимальной скорости передачи
Оптимальная скорость передачи Вопт равна 1780 Бод, при этом условие ∆τгр ≤∆τгрдоп выполняется. Из ряда стандартных скоростей для передачи данных (ГОСТ ) выбираем ближайшую меньшую скорость модуляции В=1200 Бод.
2.2 Выбор вида модуляции
Вид модуляции сигналов для каждого конкретного случая проектирования выбирается на основе отдельных критериев, так как единого обобщенного критерия для сравнения различных методов модуляции, которым можно было бы воспользоваться на практике, нет. В качестве таких критериев наиболее распространенными являются: помехоустойчивость, требуемая полоса частот, относительная сложность аппаратуры.
Так как для передачи сигнала будет использован симплексный канал, то решающим фактором при определении метода модуляции является его помехоустойчивость. В то же время значительным фактором будет являться и сложность реализации.
Наименьшей помехоустойчивостью обладают устройства передачи сигналов с амплитудной модуляцией. В то же время аппаратурная реализация такого устройства является самой простой. Наибольшей помехоустойчивостью обладает метод фазовой модуляции с двумя боковыми полосами.
Частотная модуляция занимает промежуточное значение по помехоустойчивости, а его реализация проще по сравнению с фазовой. Преимуществом частотной модуляции является также независимость коэффициента ошибок от сдвига частоты в канале (до Гц) и скачков фазы (до 40°).
Поэтому метод частотной модуляции является более предпочтительным в данном случае.
2.3 Выбор формата сообщения и расчёт среднего времени запаздывания информации
По заданию, необходимо реализовать передачу кода МТК5, состоящего из 2000 слов по 7 бит в каждом от 10 источников информации со скоростью модуляции 1200 Бод, λ=10-5, Рош=10-2. Так как тип канала по заданию симплексный, то целесообразно использовать помехоустойчивое кодирование. Дан циклический код и полином р(х)=7478=.
р(х)=х8+х7+х6+х5+х2+х+1. (2.9)
Определим оптимальную максимально возможную длину информационного сообщения, которое можно закодировать с помощью данного образующего полинома, т. е. мы должны вычислить максимальное число информационных разрядов.
Для упрощения передачи и приёма информации длину информационного блока выберем таким, что:
1. в каждом блоке должно передаваться целое число слов МТК-5;
2. время передачи данных от источника к приёмнику должно быть минимально;
3. число информационных разрядов должно быть как можно ближе к максимальному.
Число проверочных разрядов: r=8, тогда общая длина кодовой комбинации n=2r-1= 28-1=255. Число информационных разрядов: k=n-r =255-8=247.
Общее число посылок:
m = V/ku, (2.10)
где V - объём источника информации;
ku – количество информационных бит в сообщении.
Вероятность трансформации для Гаусового канала:
 , (2.11)
, (2.11)
где d – кодовое расстояние.
Кодовое расстояние d должно быть больше или равно двум, чтобы обеспечить возможность обнаружения и исправления ошибок. Возьмем d = 3.
Категория помехоустойчивости Кп = 1 для алфавитно-цифровой информации, к которой относится код мтк5 допускает вероятность трансформации в канале не более 10-7.
![]() . (2.12)
. (2.12)
Составим таблицу 2.2 для нахождения оптимальной длины информационной части:
Таблица 2.2 - Выбор длины информационной части сообщения
Количество инф. бит | Длина всего сообщения | Общее число посылок | Вероятность трансфор- мации | Количество повторов передачи сообщения | Общее кол-во переданных бит |
175 | 197 | 80 | 0.3152 | 14 | 220640 |
70 | 93 | 200 | 0.0679 | 7 | 130200 |
63 | 86 | 220 | 0.0564 | 6 | 113520 |
56 | 79 | 250 | 0.046 | 5 | 98750 |
49 | 72 | 290 | 0.036 | 5 | 102960 |
Из таблицы 2.2 видим, что оптимальная длина информационной части будет достигаться при количестве информационных бит 56 (количество повторов передачи сообщения и общее количество переданных бит минимально).
Организуем передачу информации асинхронным (старт-стопным) методом, который позволит использовать произвольную длину кадра.
Длина информационной посылки будет состоять из адреса источника – 4 бита и 56 бит информации. Длина стартовой посылки 1,5 бита, 0,5 бит – контрольная пауза и 1 бит - стоповая, т. е. защитная пауза между посылками, 8 бит для передачи номера блока. Таким образом, длина посылки будет составлять 71 бит.
Для образующего полинома вида р(х)=х8+х7+х6+х5+х2+х+1 потребуется r=8 проверочных бит, т. е. к информационной части кода добавится r = 8 и длина сообщения будет L=79 бит.
Старт | Пауза | Адрес | Номер блока | Информация | Проверочные биты | Стоп |
| 0,5 | 4 | 8 | 56 | 8 | 1 |
Рисунок 2.5 – Формат сообщения
Время передачи от одного источника с обеспечением заданной вероятности трансформации определяется по формуле:
 , (2.13)
, (2.13)
где L – длина посылки с учетом старта и стопа;
М – общее число посылок;
В – скорость передачи данных.
Подставив данные, получим:
Время цикла передачи от N источников информации определяется по формуле:
 (2.14)
(2.14)
tц = 82 * 10 = 820 (с).
Время запаздывания информации, в общем случаем, есть случайная величина. Для ее определения необходимо знать закон распределения этой величины. Это возможно только в некоторых, наиболее простых случаях функционирования СПД. Поэтому определяем количественно своевременность доставки сообщений получателем при помощи среднего времени запаздывания информации:
 , (2.13)
, (2.13)
где  ; (2.14)
; (2.14)
С – среднее время ожидания сообщением обслуживания на выходе
источника информации.
Для большинства СПД время сбора информации и ее обработки несоизмеримо мало по сравнению с временем передачи, поэтому обычно берут
![]() . (2.15)
. (2.15)
При циклическом обслуживании для определения пользуются формулой Хинчина-Поллачека:
 , (2.16)
, (2.16)
где λ – интенсивность поступления заявок на обслуживание с источников информации.
![]()
W = 36 + 82 = 118c.
При асинхронном методе передачи с использованием старт-стопного метода и без непосредственного воздействия на приемный тактовый генератор рассчитываем относительный коэффициент его нестабильности:
 , (2.17)
, (2.17)
где ε – относительное искажение импульса, которое принимается не более 40%;
Тн – время передачи информационной части посылки без старта и стопа;
В – скорость передачи.
![]() . (2.18)
. (2.18)
![]() .
.
![]() .
.
Нестабильность генераторов, выполненных на ИС без кварцевых резонаторов с использованием времязадающих RС - цепочек колеблется в пределах от 5 до 10%. Кварцевые генераторы без термостатирования имеют абсолютную нестабильность 1Гц.
Таким образом, нужно выбирать кварцевые тактовые генераторы на передающей и приемной частях системы.
2.4 Выводы к главе 2
Во 2 главе была определена оптимальная скорость модуляции, выбран наиболее подходящий метод модуляции, разработан формат сообщения для старт-стопного метода передачи информации. Получено, что для обеспечения требуемой вероятности трансформации кодовой комбинации используется многократная передача кодовой последовательности. Рассчитано среднее время запаздывания информации.
3. Разработка структурных схем и алгоритмов функционирования СПД
3.1 Разработка структурной схемы передающего устройства
В общем виде структурная схема передающего устройства состоит из следующих блоков:
· устройства управления (УУ)
· блока сбора информации от источников (БСИ)
· устройства защиты от ошибок (УЗО) с кодирующим устройством и устройством фазирования по циклам
· блока передачи данных в канал связи.
При этом каждый из блоков состоит из функционально более мелких блоков.
Получим, что для реализации заданных функций структурная схема передающего устройства должна содержать:
· К — коннектор для связи с несколькими источниками информации
· БППИ — блок приема и преобразования информации
· БН — буферный накопитель
· БНУ — блок начальной установки
· ДНУ — датчик номера устройства
· ДНБ — датчик номера блока
· ФССС — формирователь сигнала «старт/стоп»
· КУ — кодирующее устройство
· ФСО1, ФСО2 — формирователи сигналов обмена с ООД и УПС
· БАСИ — блок аварийной сигнализации и индикации
· СПП — счетчик повторной передачи
· ФТИ — формирователь тактовых импульсов
· УУ — устройство управления
· УПС — устройство преобразования сигнала для передачи по каналу связи (КС).
Основным блоком УЗО является устройство управления (УУ), которое управляет работой всех остальных блоков. Управляющие воздействия на выходе УУ вырабатываются на основе анализа входящих сигналов и зависят от режима работы УЗО и временной позиции. Переключение УУ происходит под действием тактовых импульсов, формируемых ФТИ. Для выработки необходимых сигналов обмена используются соответствующие формирователи ФСО. Для установления устройств в начальное состояние применяется блок начальной установки. Данные, поступающие с источников, отправляются в буферный накопитель, затем объединяются с адресом источника, поступающим с ДНУ. Эти данные составляют информационную последовательность от источника, и ее формирование происходит в БППИ.
Данные передаваемые в дискретный канал связи кодируются помехоустойчивым кодом.
Для индикации аварийных ситуаций в схему включен блок аварийной сигнализации и индикации (БАСИ). Также этот блок служит для индикации состояния УЗО. Индицировать целесообразно следующие возможные ситуации: включение питания АПД; передача/прием; ожидание; ошибка периферийного устройства; ошибка нумерации блоков.
Для временного хранения данных используется буферный накопитель (БН), в который будет помещаться информация, полученная от источника информации, и хранится до передачи их приёмнику.
Так как для обеспечения требуемой вероятности трансформации, необходимо повторять передачу одного сообщения 5 раз, используем счетчик, который будет подсчитывать количество передач одного сообщения. Количество повторов будет подсчитываться, и данные будут подаваться на УУ. По сигналу с управляющего устройства счетчик числа повторов будет обнуляться.
В устройстве приёма и передачи к сообщению добавляются стартовая и стоповая комбинации с помощью ФССС.
Структурная схема передающего устройства представлена на рисунке 3.1.
Рисунок 3.1 - Структурная схема передающего устройства
3.2 Алгоритм функционирования передающего устройства
При включении питания передающего устройства сигнал поступает на БНУ, который устанавливает все остальные блоки в начальное состояние. Затем УУ подаст сигнал на БАСИ о наличии питания.
Источник информации посылает сигнал о запросе передачи на коннектор. Коннектор подключает один из источников информации к СПД и направляет сигнал запроса через ФСО1 в УУ. При поступлении сигнала УУ направляет номер устройства в ДНУ и с помощью ФСО2 посылает запрос в УПС о готовности аппаратуры канала. После приема сигнала запроса от УПС линия связи удаленной аппаратуры передачи данных (АПД) переключается на вход УПС. Если АПД не готова к процессу передачи данных, то включается аварийная сигнализация, а аппаратура переключается снова в режим ожидания вызова. При готовности АПД система переходит в состояние передачи информации. Через К информация с источника поступает на БППИ, номер источника записывается в ДНУ, а ДНБ устанавливается в 0.
После чего СПД посылает в канал сообщение. Передаваемое сообщение содержит стартовую и стоповую комбинации, которые формируются ФССС; информационную последовательность, поступающую с источника информации через К и преобразуемую в последовательный код в БППИ; номер блока с датчика ДНБ, номер устройства с датчика ДНУ. Данные, передаваемые в дискретный канал связи, кодируются в помехоустойчивым кодом. Сформированные КУ проверочные элементы добавляются к информационным. Поступившая источника информации через К информационная последовательность одновременно с передачей в канал связи записывается в буферный накопитель БН. Так как одно и то же сообщение передается несколько раз, то последующая повторная передача будет осуществляться напрямую из БН без запроса к источнику информации. СПП контролирует количество повторно переданных сообщений и при достижении установленного числа посылает сигнал на УУ. После чего УУ посылает через ФСО1 сигнал на К о получении и передаче в БППИ новой порции информации и увеличивает ДНБ. После сигнала от ДНБ о том, что передано необходимое количество блоков информации от данного источника, УУ прекращает передачу сообщений, обнуляет ДНБ и ДНУ, через ФСО1 посылает сигнал на К о прекращении получения информации от источника и через ФСО2 посылает сигнал на УПС о переходе в режим ожидания.
Если данные больше передавать не требуется, можно отключить питание.
Алгоритм работы передатчика изображен на Рисунок 3.2.
Рисунок 3.2 – Блок-схема алгоритма работы передатчика
3.3 Разработка структурной схемы приемного устройства
Вторая часть СПД располагается на приемной стороне, в её состав входят следующие блоки:
· УПС — устройство преобразования сигнала
· ФСО1, ФСО2 — формирователи сигналов обмена
· ФТИ — формирователь тактовых импульсов
· РгСК – регистр служебной комбинации
· ДшСК – дешифратор служебной комбинации
· БФЦ — блок фазирования по циклу
· М – мажоритарное устройство
· ДК — декодер (декодирующее устройство)
· БН — буферный накопитель
· БПВИ — блок преобразования и выдачи информации
· БНУ — блок начальной установки
· БАСИ — блок аварийной сигнализации и индикации
Работой приемной части управляет устройство управления (УУ). Как и в передающей части, необходимы в схеме блоки: БАСИ, ФТИ, БНУ, ФСО. В режиме передачи данных основное назначение приемного устройства состоит в том, чтобы принять данные, декодировать их и передать информацию получателю.
Так как сообщение передаётся несколько раз, для обеспечения необходимой вероятности трансформации, нужно применить устройство для подсчета количества повторов, а также мажоритарный элемент, который используется для мажоритарного декодирования циклического кода.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 |
