

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Нужна проверка на выход за границу сегмента.
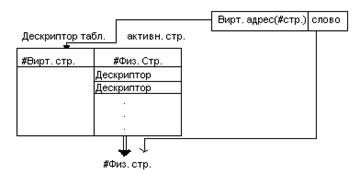 Активная таблица хранится в сверхОП и выглядит:
Активная таблица хранится в сверхОП и выглядит:
Обычно размер стр= 4кБ, в некоторых ЭВМ в структуре дескриптора есть бит, который позволяет изменить размер стр. на больший.
Замещение страниц при страничной организации памяти.
Необходимо загрузить страницу с внешнего устройства:
1. Место в ОП есть - все нормально
2. Места в ОП нет, значит его надо освободить - выгрузить какую-то неактивную страницу.
При обращении к странице в первую очередь устанавливается бит активности
Главная задача - определить какую страницу следует выгрузить.
Алгоритмы замещения:
1. Алгоритм Михновского-Мира - минимальное количество замещений страниц для конкретного потока обращений. Идея: выгрузка страницы, обращение к которой будет наиболее поздним.
2. ОРТ - алгоритм (optimal) - минимум среднего количества замещений выгружается стр., вероятность обращения к которой не больше, чем к любой другой из ОП.
Эти алгоритмы физически нереализуемы (необходима информация о странице в будущем).
3. LRU (Least Recently Used) удаляется тот блок, который меньше всего используется.
4. FIFO
5. LIFO
6. Блок, в который не было записи и который не активен.
7. Приоритетный стек
25. Ввод-вывод с прямым доступом к памяти.
Прямой доступ к памяти (ПДП) – это способ пересылки данных. при использовании которого устанавливается непосредственная связь между устройством ввода-вывода и памятью, без участия ЦП, т. е. периферийное устройство может пересылать данные непосредственно в память или получать их из памяти. ЦП при этом освобождается от функций управления обменом данными и может выполнять в это время другие задачи. Кроме того скорость обмена с ПДП намного выше, чем с участием ЦП.
Блок –схема системы ввода-вывода с ПДП
 |
Видно, что ЦУ и периферийные устройства (ПУ) используют одну шину (SYS BUS) для связи с памятью, т. е. они не могут обращаться к памяти в одном цикле.
Система с ПДП может осуществлять пересылки данных между различными областями памяти и различными ПУ.
Существует несколько вариантов реализации ПДП:
- ПДП с блокировкой ЦП. ЦП отключается от общей шины на время выполнения пересылки с ПДП. Это наиболее простая реализация системы с ПДП, но отключение и подключение ЦП к шине требует довольно много времени. Кроме того в это время ЦП не может выполнять никаких операций.
- ПДП с квантованием цикла памяти. Каждый цикл памяти разбивается на два временных интервала – один для ЦП, другой для ПДП. Этот метод обеспечивает большую скорость как для выполнения операций ЦП, так и для ПДП. При этом в каждом цикле обеспечивается возможность обращения к памяти и ЦП, и ПУ в ходе ПДП. Недостаток: необходимость применения быстродействующих и дорогостоящих ЗУ.
- ПДП с «захватом цикла». Наиболее выгоден по соотношению стоимость/производительность. ПУ, осуществляющее ПДП, «отнимает» у ЦП цикл памяти, но ЦП не блокируется и может выполнять программу, т. е. работа ЦП и пересылка с ПДП совмещаются во времени. Если цикл памяти нужен одновременно ЦП и ПУ, то приоритет отдается последнему, а ЦП ожидает окончания цикла ПДП. Производительность ЦП снижается только в том случае, когда ЦП использует весь диапазон адресов памяти. Таким образом достигается удовлетворительная производительность за счет относительно не высоких затрат.
26. Структура и функции контроллера ПДП.
Поскольку ЦП не участвует в обмене с ПДП, а обменом нужно управлять, в состав системы вводится контроллер прямого доступа к памяти (КПДП), который и вырабатывает необходимые управляющие сигналы и адреса ОП.
КПДП выполняет следующие функции:
1. Управление инициируемой ЦП или ПУ передачей данных между ОП и ПУ.
2. Задание размера блока данных, который подлежит передаче, и области памяти, используемой при передаче.
3. Формирование адресов ячеек ОП, участвующих в передаче.
4. Подсчет числа единиц данных (байт, слов), передаваемых от ОП к ПУ или обратно, и определение момента завершения операции ввода-вывода.
|
 |
КПДП может быть как один на несколько ПУ, так и каждое ПУ может иметь свой КПДП.
При инициализации операции ввода-вывода в ТСчД заносится размер подлежащего передаче блока (число байт или слов), а в РгТАД – начальный адрес области памяти, используемой при передаче. При передаче каждого байта содержимое РггТАД увеличивается на 1, при этом формируется адрес очередной ячейки ОП, участвующей в передаче. Одновременно уменьшается на 1 содержимое ТСчД. Обнуление ТСчД указывает на завершение передачи.
27. Назначение, классификация сопроцессоров ввода-вывода. Управление сопроцессорами. Понятие программы управления сопроцессором ввода-вывода.
Сопроцессор ввода-вывода (СПВВ) предназначен для обеспечения ПДП. Выполняет следующие функции:
- задание размеров массива данных и области памяти, участвующих в обмене
- формирование адресов последовательных ячеек ОП, используемых в передаче
- подсчет числа единиц данных, прошедших через канал
- определение момента завершения передачи массива данных
При этом СПВВ должен обеспечивать буферизацию и преобразование данных для согласования работы ОП и ПУ.
Кроме того для минимизации участия ЦПУ в операциях ввода-вывода может выполнять: организацию цепочки данных; организацию пропуска информации; организацией цепочки операций; формирование запросов на прерывание; блокировку контроля неправильной длины.
СПВВ в отличие от КПДП, имеет средства позволяющие ему самостоятельно из памяти управляющее слово, получив команду от ЦПУ. Если управляющее слово выполнено нормально, то он не дает никакого запроса на прерывание, этот запрос будет только после последнего управляющего слова. Если он подает запрос на прерывание в ЦПУ после каждого выполненного управляющего слова, то он похож на КПДП + СА + Чт. УС., эти запросы необходимы лишь как сообщения о том, что слова выполнено нормально, и можно переходить к другому.
СПВВ | |||
КПДП | Средства адресации и чтения управляющих слов | ||
 |
Изначально СПВВ был ориентирован на другую структуру:
СПВВ четко делятся по обмену с ЦПУ на селекторные и мультиплексорные.
Программное управление СПВВ
Каждая операция или совокупность операций производится под управлением соответствующей программы канала. Программа канала представляет собой некоторую последовательность УС, обеспечивающую выполнение определенной операции ввода-вывода. Обычно канальные программы хранятся в ОП.
Система команд ЭВМ содержит небольшое число универсальных по отношению к разным типам ПУ команд ввода-вывода.
28. Структура и работа сопроцессора ввода-вывода в селекторном режиме.
СПВВ работая в селекторном режиме может вести обмен только с одним ПУ, при этом могут одновременно работать несколько ПУ, но обмен СПВВ будет вести только с одним.
|
 |
Структура:
КОП | GR TA | RG УС | RG TA – регистр текущего адреса RG УС – счетчик УС RG ПВУС – регистр предварительного УС | |
RG ПВУС | ||||
Если текущее УС не является последним, то RG УС … 8-4, инициируется процедура чтения следующего УС и оно в RG ПВУС, т. е. это можно рассматривать как дополнительную память размером в 1 УС.
1) Адрес 1-го УС содержится в команде, которая последует из СПВВ.
SIO | № СПВВ | № ПУ | Адрес 1-го УС |
2) Независимо от количества СПВВ в ОП выдается одна фиксированная ячейка наделенная адресом, содержимое этой ячейки – адресное слово.
ЦПУ формирует последовательность УС для СПВВ и размещает ее в ОП, адрес 1-го УС помещает в адресное слово, после этого ЦПУ выдает SIO в СПВВ, а СПВВ уже обращается по адресному слову (т. е. фиксированному адресу) и читает адрес УС, а потом и само 1-е УС и начинает работать.
ОП |
адресное слово |
29. Структура и работа сопроцессора ввода-вывода в мультиплексном режиме.
СПВВ работая в мультиплексорном режиме может вести обмен практически со всеми ПУ. Инициатива начала обмена всегда принадлежит ПУ. Иногда предусматривается монопольный режим, работа в таком режиме походит на работу в селекторном режиме.
|
 |
Структура:
СПВВ выполняет несколько программ (простых – либо ввод, либо вывод). Получается, что если ПУ1 производит ввод, то информация помещается в одну область ОП, а если ПУ1 производит вывод, то информация берется из другой области, соответственно и TA при этом будут разными.
На адресацию ПУ отводится 1 байт:
1 яч. | 1. УС (RG УС) | |
2. АУС (RG АУС) | ||
3. RG D | ||
4. №ПУ – адрес соответствующей ячейки | ||
└статическая память СПВВ |
Когда идет обмен, ПУ выставляет запрос на сеанс связи и это требование сопровождает своим №, СПВВ использует этот № в качестве адреса памяти, хранящей всю управляющую информацию. № ПУ сравнивается с хранящимся и если они совпадают, то выполняется обмен. После этого всю информация опять записывается во внутреннюю память СПВВ. Если совпадения не возникает, то это ошибка – сразу блокируется пересылка данных с СПВВ в ОП, и посылается запрос на прерывание, а несовпадение №-ов фиксируется в RG состояния СПВВ.
30. Принципы организации контроля функционирования ЭВМ. Классификация методов контроля. Программный контроль.
В производимых ЭВМ преобразованиях информации очень важна их достоверность, для этого используются различные методы контроля функционирования ЭВМ. Если такие методы отсутствуют, то пользователь вынужден производить повторный расчет, занимая тем самым машинное время.
 |
Наличие системного контроля должно закладываться на этапе проектирования ЭВМ. Системный контроль должен тесно взаимодействовать с системами диагностики.
Введение избыточности:
1) временная – увеличение времени выполнения операций для контроля.
2) пространственная – увеличение разрядности данных для контроля.
Аппаратный:
Наличие аппаратного контроля означает, что операционный контроль осуществляется непосредственно во время процесса выполнения операций. При введении аппаратного контроля вводится избыточность разрядов (пространственная).
Должен обеспечивать:
1) контроль данных
2) контроль команд – имеется дескриптор выполняемости, если он взведен – это команда, иначе – данные.
3) контроль адресов – не выходит ли адрес за пределы сегмента (при сегментно-страничной организации)
Оперативный контроль – это контроль, который производится постоянно:
- сквозной (контролируются все устройства)
- локальный (контролируется конкретное устройство)
Встроенный контроль – контроль, при котором в систему встраиваются специальные датчики, которые контролируют электрические параметры. Чаще всего используются в источниках питания.
Тестовый – различного рода тестирование:
- контролирующий – тестовые программы с заранее известным результатом
- диагностирующий – тестовые программы, выявляющие место сбоя
Сбои могут быть вызваны помехами. Помехи бывают:
1) локальные – в цепи прохождения сигнала. Например, несоответствие разъемов.
2) внутри каких-либо подсистем. Например, внутри провода.
3) внешние. Например, в сети.
Программно-логический контроль:
Контроль основан на формировании результата выполнения операции 2-мя различными независимыми путями и дальнейшем их сравнении. Необходимо выявлять как случайные ошибки, так и ошибки вызванные отказами. В данном методе функции контроля выполняет пользователь.
Можно выделить следующие методы:
- метод программного счета. Одна и та же программа прокручивается несколько раз. В итоге получаем результат. Если все хорошо, то достаточно прогнать 2 раза. Плохо определяются ошибки вызванные отказами.
- метод обратного счета. Сначала решается прямая задача, затем она же, но наоборот. Но возникает необходимость писать 2 программы, сравнивать результаты прямого и обратного счета с учетом погрешностей. Выгоден только при небольших размерах обратного алгоритма.
- решение задачи по двум алгоритмам: более и менее точному. Недостатки: необходимость написания двух программ; собственно, поиск второго, более простого, алгоритма.
- метод контрольных точек. В этом случае в программу вводится процедура для выполнения контроля. Этот метод реагирует не на случайные ошибки, а на отказ.
2-ой и 3-ий методы взаимодополняют друг друга.
31. Аппаратные методы контроля арифметических и логических операций.
Методы:
1) Цифровой контроль по модулю (в основном применяется)
2) Числовой контроль по модулю (почти не применяется)
1) В качестве контрольных разрядов берется остаток от деления суммы цифр исходного кода на выбранный модуль.
Частности: В качестве модуля берется 2 – если Σ цифр четная Þ 0, если Σ не четная Þ 1. Похоже на контроль по паритету. При отсутствии передачи – 0.
Методы:
1)
 |
Обращение кода – т. е. преобразование кода в прямой и наоборот.
2) Сдвиг – надо подсчитывать четность количества сдвинутых 1 (поставить Т-тригер)
3) Суммирование
S0, S1, …, Sn-1 ,где Si = ai Å bi Å ci (ci – входной перенос)
 | |
S0 Å S1 Å …Å Sn-1 = a0 Å a1 Å …Å an-1 Å b0 Å b1 Å …Å bn-1 Å c0 Å c1 Å …Å cn-1
2) В качестве контрольных разрядов берется остаток от деления самого числа на модуль.
Модуль берется 3 (2n – 1). Необходимо 2 контрольных разряда. Этот контроль выявляет одинарные и некоторые двойные ошибки.
Если А+В=С, то Кр. А+Кр. В=Кр. С (по модулю 3). Рассматривается в плане целых чисел.
А/В = С + ост. | 1) контроль умножения 2) контроль деления 3) контроль логич. опер. | \ | из-за этого не используется / |
32. Интерфейсы ЭВМ и систем. Классификация, основные понятия.
Синхронные и асинхронные.
Внутренние и внешние.
Внешние интерфейсы.
Толковый словарь по вычислительным системам определяет понятие интерфейс (interface) как границу раздела двух систем, устройств или программ; элементы соединения и вспомогательные схемы управления, используемые для соединения устройств.
По способу передачи информации интерфейсы подразделяются на параллельные и последовательные. В параллельном интерфейсе все биты передаваемого слова (обычно байта) выставляются и передаются по соответствующим параллельно идущим проводам одновременно. В PC традиционно используется параллельный интерфейс Centronics, реализуемый LPT-портами. В последовательном интерфейсе биты передаются друг за другом, обычно по одной линии. СОМ-порты PC обеспечивают последовательный интерфейс в соответствии со стандартом RS-232C.
Различают три возможных режима обмена — дуплексный, полудуплексный и симплексный. Дуплексный режим позволяет по одному каналу связи одновременно передавать информацию в обоих направлениях. Он может быть асимметричным, если пропускная способность в направлениях «туда» и «обратно» имеет существенно различающиеся значения, или симметричным. Полудуплексный режим позволяет передавать информацию «туда» и «обратно» поочередно, при этом интерфейс имеет средства переключения направления канала. Симплексный (односторонний) режим предусматривает только одно направление передачи информации (во встречном направлении передаются только вспомогательные сигналы интерфейса).
Другим немаловажным параметром интерфейса является допустимое удаление соединяемых устройств. Оно ограничивается как частотными свойствами кабелей, так и помехозащищенностью интерфейсов.
Важным свойством интерфейса, на которое часто не обращают внимания, является гальваническая развязка (т. е. физический «разрыв» электрической линии, для передачи информации через подобные «разрывы» обычно используется оптопары).
Внутренние интерфейсы.
Внутренние интерфейсы, предназначенные для быстрой связи на короткие расстояния. Стандартизованные шины расширения ввода/вывода обеспечивают расширяемость PC, который никогда не замыкался на выполнении сугубо вычислительных задач. Эти шины предоставляют более широкие возможности для взаимодействия процессора с аппаратурой, не скованные жесткими ограничениями внешних интерфейсов. Шины расширения ввода/ вывода реализуются в виде слотов на системной плате компьютера.
Краткий перечень современных внутренних интерфейсов: ISA-8 и ISA-16,
EISA, VLB, PCI, AGP, PC Card, он же PCMCIA,
За универсальность и производительность внутренних шин расширения приходится расплачиваться более замысловатой реализацией интерфейсных схем и сложностями при обеспечении совместимости с другим установленным в компьютер оборудованием. Здесь ошибки могут приводить к потере (хорошо, если временной) работоспособности компьютера.
При рассмотрении интерфейсов важным параметром является пропускная способность.
33. Принципы организации интерфейсов, структура связей, функциональная организация
Структуры шин и линий интерфейса. При проектировании ЭВМ приходится решать задачу — организацию передачи информации в группе взаимосвязанных устройств. Характерным является случай централизованной связи, когда передача информации производится только между устройством У0 и одним из устройств У1...Уn Примером является передача информации между каналом и ПУ.
При организации связи группы устройств возникает необходимость в адресации и идентификации устройств У1...Уn. Адресация в данном случае состоит в выборе центральным устройством У0 одного из устройств У1...Уn для связи. Идентификация состоит в определении центральным устройством, какое из устройств У1.... Уn запрашивает связь.
Адресация и идентификация устройства осуществляются путем передачи соответствующей информации по линиям интерфейса.
Различные структуры линий и шин интерфейса можно классифицировать следующим образом: индивидуальные, коллективные, комбинированные.
Наиболее надежной является структура с индивидуальными линиями и шинами, поскольку выход из строя одной группы линий и шин не влияет на работу других устройств. При использовании индивидуальных линий и шин упрощаются адресация и идентификация, но увеличивается количество оборудования. Индивидуальные линии и шины используются в основном для связи вычислительной машины с устройствами технологической автоматики.
Структура с коллективными шинами и линиями имеет меньшую надежность, но при необходимости организации связи с большим числом устройств такое выполнение позволяет уменьшить объем оборудования.
На рис. 11.14 представлена структура с индивидуальными линиями и шинами. Жирными линиями изображены шины, по которым передаются данные.
Центральное устройство УО с любым устройством У, связывается с помощью индивидуальных линий Ai и шин Вi
Рис. 11.14. Структура с индивидуальными линиями и шинами
Устройство У0 имеет переключатели S, для подключения шин В,. На рисунке переключатели изображены в виде электромеханических контактов, однако такие переключатели реализуются в виде электронных устройств.
Для адресации Уi устройство У0 должно включить соответствующий переключатель Si.
Идентификация устройства Уi осуществляется следующим образом: сначала Уi на линии Ai возбуждает сигнал требования на установление связи, затем соответствующий узел Yo1 устройства Уo определяет, от какого устройства пришел сигнал требования. Как только устройство Уo будет готово к обмену информацией, замыкается переключатель Si и начинается передача данных.
На рис. 11.15 представлена структура с коллективными линиями и шинами. По коллективной шине В происходит обмен информацией между У0 и Уi, по коллективной линии А из Уi в Уo передается сигнал требования на установление связи. Кроме того, имеется коллективная линия D, которая выходит из Уo, последовательно проходит через устройства Уi и возвращается в устройство Уo. При адресации Уi устройство Уo устанавливает на шинах В код номера устройства Уi и посылает сигнал «выборки» по линии D. Если код номера на шинах В не совпадает с номером устройства Уi то переключатель Tj, остается в исходном состоянии и сигнал по линии D распространяется на следующее устройство Уi+1. При совпадении кода с номером устройства переключатель Тj, замыкается, дальнейшее распространение 'сигнала по линии D прекращается, а выбранное устройство Уj, соединяется с Уo путем замыкания переключателя Si. Если сигнал, посылаемый по линии D, возвращается в Уo, то это означает, что адресованное устройство Уi не найдено (обычно это свидетельствует о неисправности в работе интерфейса).
К интерфейсам малых и микро-ЭВМ, в основном предназначенных для работы в системах реального времени, предъявляются повышенные требования в отношении простоты, гибкости и высокой динамичности. Для этих машин характерным архитектурным решением является общий интерфейс «.общая шина» (ОШ), при котором один и тот же набор линий обеспечивает связь между процессором, основной памятью и периферийными устройствами.
Интерфейс «мультишина», в этом случае обмен данными осуществляется асинхронно по схеме «задатчик-исполнитель». Интерфейс «мультишина» применяется, например, в микро-ЭВМ СМ-1800, в устройствах и системах, в которых используются микропроцессоры К580.
Интерфейс «мультишина», являясь модификацией интерфейса «общая шина», по сравнению с последним обладает большими логическими возможностями.
34. Приницпы построения, схемы цифро-аналоговых преобразователей код - напряжение. Параметры цифро-аналоговых преобразователей.
Операционный усилитель - инвертирующий усилитель постоянного тока с большим коэффициентом усиления и высоким входным сопротивлением.
|
Kȴ
![]()
|
 |
У усилителя должно быть большое входное сопротивление ( в идеале бесконечность). При больших R они сопоставимы с Rвх ОУ, что приводит к дополнительным погрешностям.
Интегратор можно использовать в качестве фильтра НЧ.
|
Как включать ОУ
Неприятная особенность - дрейф «0», который связан с температурным фактором.
ЦАП N®U
1. Взвешенные резистивные сетки или делители
2. Цепочечные (лесничные) делители.
1. Недостаток в том, что в схеме очень много номиналов резисторов.
2. Сетка R-2R
|
Для прямого включения необходим хороший источник (с малым внутренним сопротивлением)
Параметры цифро-аналоговых преобразователей.
|
h=(Umax-Umin)/(2n-1) - для двоичного кода.
Разрешающая способность преобразования - наименьшее значение ступени квантования, которое представляет наименьшее изменение выходной аналоговой величины.
У реальной характеристики ступень квантования в разных точках различная, поэтому используется среднее значение ступени квантования по всему множеству.
Точность ЦАП характеризуется рядом отклонений реальной характеристики от идеальной.
1. Нелинейность.
2. Дифференциальная нелинейность.
3. Монотонность.
4. Смещение начальной точки характеристики преобразования.
5. Смещение конечной точки характеристики преобразования от номинала.
Нелинейность измеряется в долях единицы младшего разряда.
dL=Dx/h*100%, dL=Dx/Xk
Dx - максимальное отклонение характеристики от заданной прямой.
Xk - значение в конечной точке характеристики преобразования.
![]() - дифференциальная нелинейность.
- дифференциальная нелинейность.
h - действительное значение ступени квантования.
![]() - среднее
- среднее
Дифференциальная нелинейность в ЦАП указывается для худшего случая.
Монотонность - неизменность знака приращения выходной величины при последовательном изменении входного кода.
Крутизна (коэффициент) преобразования - это крутизна аппроксимирующей кривой.
Величина отклонения реальной величины от идеальной считается в конечной точке.
|
Причины смещения.
1. Дрейф «0».
2. Управляющие сигналы могут поступать в аналоговую цепь (зависит от конструкции)
При разводке цепей аналоговые проводники и земля должны быть соединены в одной точке.
Аналоговую землю разводят пауком, и в ряде случаев в этой точке соединяют с цифровой (исходя из минимальности помех).
Динамические параметры.
Время установления входного сигнала - это время между тем, как переключился вход, и временем, когда выходной сигнал будет отличаться от нужного не более чем на 0,5 EMP.
Время задержки - это время от 0,5 логического сигнала до 0,5 выходного. Другой вариант: tзад - от 0,1 Uвых до 0,9 Uвых.
Скорость нарастания выходного сигнала - отношение приращения выходной аналоговой величины ко времени, за которое это приращение произошло. Чаще всего измеряется при помощи значения tз.
Время переключения - от момента изменения кода до 0,9 Uвых.
35. Алгоритмы работы, схема аналого-цифровых преобразователей напряжение - >код.
АЦП U®N
1. Преобразование напряжения входов может происходить:
· с промежуточным преобразованием U®T®N
· без промежуточного преобразования U®N
2. Без обратной связи, с обратной связью.
Fкв>=2fв
|
Схема АЦП 1 1
Для повышения точности нужно использовать ОС.
|
АЦП 2 2. Схема медленная.
Схема АЦП последовательного счета.
Частота генератора на статическую погрешность не влияет. Динамическая погрешность - неоднородность времени срабатывания входа.
АЦП поразрядного преобразования (на основе алгоритма половинного деления)
|
 В регистре сдвигается «1». Для работы требуется 4 такта. Повышается быстродействие схемы.
В регистре сдвигается «1». Для работы требуется 4 такта. Повышается быстродействие схемы.
|
Схема прямого кодирования (непосредственного счета).
Такие компараторы формируют кода за 1 такт.
Число компараторов = 2n (для 4 = 16)
36. Параметры аналого-цифровых преобразователей.
Статические параметры:
1. Количество разрядов.
2. Характеристики преобразования.
Напряжение межкодового перехода - такое входное напряжение, статистическая вероятность которого в заданное и предшествующее заданному значению кода равны.
Разность двух соседних значений НМП - шаг квантования характеристики преобразования АЦП.
Отличия реальной характеристики от идеальной:
1. Смещение «0»
2. Отклонение конечной точки характеристики преобразования.
3. Нелинейность (отклонение действительной от идеальной).
4. Дифференциальная нелинейность - отклонение действительного значения шагов квантования от их среднего значения.
5. Зона неопределенности НМП.
Динамические характеристики.
1. Время преобразования.
2. Частота преобразования.
3. Апертурное время.
4. Апертурная неопределённость (дрожь).
5. Монотонность характеристики преобразования при максимальной допустимой скорости изменения входного сигнала.
6. Отношение сигнал/шум.
1. Время от момента начала изменения входного сигнала до формирования кода на выходе.
2. ![]()
3. Это время, характеризующее неопределенность между значением кода и временем, к которому этот код относится.
4. Это случайное изменение апертурного времени в конкретной точке характеристики апертурного преобразования.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 |
