


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Владислав Савченко
Севастопольський національний технічний університет
(науковий напрям: Філологія та журналістика)
Синтез робастной системы управления тяжёлым грузовым судном на основе подходов μ-теории.
Ключевые слова: регулятор, робастное управление, судно
Введение
Знание динамических характеристик объекта управления обязательно в любом синтезе систем управления. Эксперименты в области управления кораблями приводят к выводам, что вместо знания взаимодействия управления и влияния бортовой качки выгодней знать характеристики манёвренности судна по модели. Знание динамики, связанной с креном, рысканием и диферентом, не только способствует синтезу более манёвренных моделей, но также помогает синтезировать особые виды управления, в которых результаты полагаются в полной мере на динамическую связь между креном, рысканием и дифферентом.
Хотя модели с четырьмя степенями свободы описания движения кораблей хорошо известны, важность влияния крена пока установлена слабо. Вследствие этого, модели, описывающие взаимодействие между креном, дифферентом и рысканием, изучены слабо.
Рассмотрим задачу управления движением тяжёлого грузового судна в шести степенях свободы в условиях наличия неопределённостей в модели судна. Наличие неопределённостей в моделях может привести к возникновению неустойчивости. Всвязи с этим в теории робастного управления следует ограничивать модель системы по коэффициенту усиления системы в целом для того, чтоб в ней не возникало ситуаций, в которых модель становится неустойчива. В общем случае речь идёт об абсолютной робастной устойчивости. Для её достижения требуется применение методов построения робастных регуляторов, минимизирующих влияние неопределённостей в модели объекта на наиболее важные характеристики судна, коими являются дифферент, крен, качка, и т. д. Для этой цели применим теорию μ - анализа и синтеза робастных регуляторов на модель исследуемого объекта, в частности воспользуемся возможностью упрощения задачи, суть которого заключается в нахождении максимально возможного значения μ для данной системы - её верхнего предела.
Основная часть
Исследование модели тяжёлого грузового судна
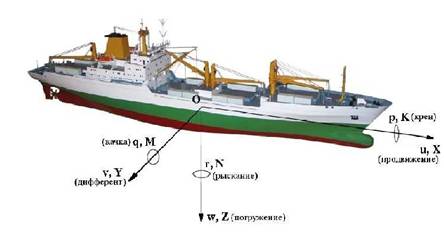
Рисунок 1 --- Модель корабля в шести степенях свободы. Кинематические и динамические переменные для уравнения движения центра масс корабля.
Рассмотрим математическую модель для описания динамики корабля в шести степенях свободы. Движение корабля в шести степенях свободы раскладывается на поступательные (продвижение вперёд, поворот и вертикальное смещение), а также вращательные движения по трём осям (крен, рыскание и дифферент). Для определения уравнений движения рассмотрены 2 системы отсчёта: инерционный или фиксированный по отношению земной системе О, которые могут быть получены в соответствии с системой отсчёта, привязанной к кораблю в некоторых начальных условиях и неподвижной относительно корпуса точки О (рисунок 1). Наиболее общая выбранная позиция для фиксированной точки тогда, когда она даёт кормовую симметрию отн. плоскости x-z и относительную симметрию отн. плоскости y-z, тогда как начало оси z определено уровнем воды.
Величины, определяющие позицию и ориентацию корабля, обычно, выражены в инерционных координатах и обозначены: [x, y, z]T и [p, q, r]T соответственно, в то время как силы [X, Y, Z]T, моменты [K, M, N]T, линейные скорости [u, v, w]T и угловые скорости [p, q, r]T выражены относительно начальных координат корабля.
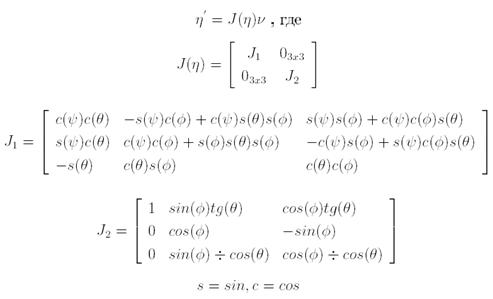
Определим вектор положения-ориентации по отношению к инерционной системе отсчёта
η = [x, y, z,φ,θ,ψ]T
и вектор линейно-угловой скорости по отношению к системе отсчёта, привязанной к корпусу корабля
ν = [u, v, w, p, q, r]T
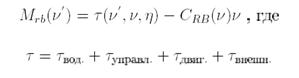
Рассмотрим динамическое уравнение движения корабля с учётом внутренних и внешних воздействий в проекциях связанной с кораблём системы координат
Используя ньютоновский подход, получим уравнения движения корабля в векторной форме (в системе отсчёта, привязанной к кораблю)
Уравнения, более детально описывающие динамику судна, опущены для упрощения изложения материала. Выполним аппроксимацию модели шести степеней свободы к модели четырёх степеней свободы, реализовав следующую подмену
![]()
и тем самым упростим модель, получив уравнение движения судна в следующем виде
Построение математической модели объекта управления
В результате линеаризации нелинейной модели корабля система нелинейных дифференциальных уравнений сводится к линейной системе обыкновенных дифференциальных уравнений
х(t) --- вектор состояния системы;
u(t) --- вектор управлений (входов);
у(t) --- вектор выходов.
Матрицы объекта имеют вид
Синтез регулятора
Рассмотрим задачу управления движением корабля в условиях наличия неопределённостей в его модели. Неопределённости модели могут привести к неустойчивости системы в целом на интервале допустимого уровня управления. В частности, поворот руля на существенные углы может привести к недопустимому крену судна, что может вызвать опрокидывание контейнеров с грузом. Задача управления состоит в том, чтобы сгладить энергетические всплески модели с целью достижения плавности манёвров корабля. Исследуем модель в программном пакете Simulink и синтезируем для неё μ - регулятор. В качестве функционала качества регулятора выступает следующее соотношение

Значительно упростим задачу вычисления функционала качества системы, используя следующие неравенства нахождения верхнего предела значения μ

Составим алгоритм синтеза регулятора для рассмотренной модели, используя способ нахождения максимальновозможного значения вышеприведённого функционала качества
clc
%constant data for RPMM model for the Container
% H-matrice
H = [
(m-Xu__
0 (m-Yv__) -(m*CGz+Yp__) (m*CGx-Yr__) 0 0
0 -(m*CGz+Kv__) (Ixx-Kp__) (-Kr__) 0 0
0 (m*CGx-Nv__) (-Np__) (Izz-Nr__) 0 0
];
A = [
Yv Yp+Ypu*ua_ Yr-m*u_ Yf 0
Kv Kp+Kpu*ua_ Kr+m*CGz*u_ -(ro*g*D*GM) 0
Nv Np+Npu*ua_ Nr+m*CGz*u_ Nf 0
];
B = [Yd; Kd; Nd; 0; 0];
C = eye(5,5);
D = zeros(5,1);
X0 = [Unom; 0; 0; 0; 0];
W = ss(A, B,C, D);
rank(ctrb(A, B))
% ans =
% 5
%
%modal correction
CORR = [];
A_full = A - B*CORR;
K = place(A, B,eigs(A_full))
% K =
% 9
%
%perron analysis
perron = 20*log10(max(sigma(ss(A_full, B,C, D),logspace(-3,3))))
% perron =
% 0.6845
%
Получены параметры корректирующего звена0.9), которое приводит значение верхней границы функционала качества к значению 0.6845. Так как это значение очевидно меньше единицы, то регулятор с такими параметрами удовлетворяет условиям синтеза.
Анализ системы управления
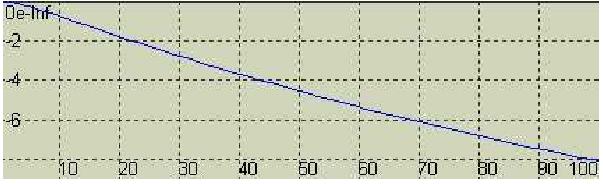
Рисунок 3 --- Реакция дифферента на угол поворота в 5°
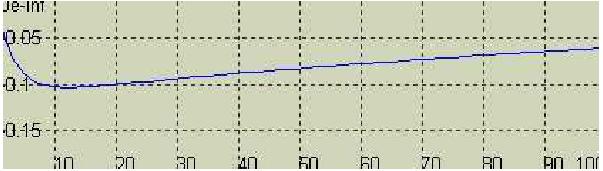
Рисунок 4 --- Реакция крена на угол поворота в 5°
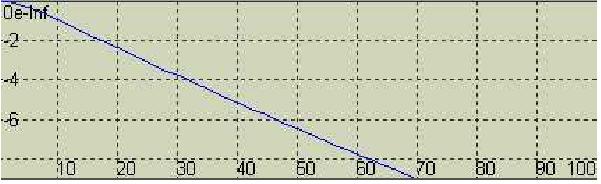
Рисунок 5 --- Реакция дифферента на угол поворота в 10°
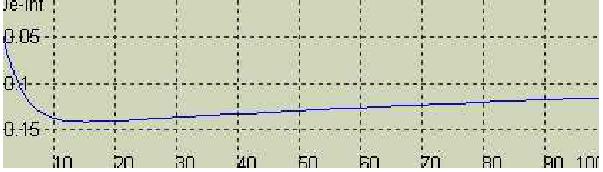
Рисунок 6 --- Реакция крена на угол поворота в 10°
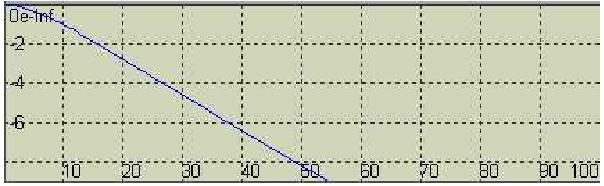
Рисунок 7 --- Реакция дифферента на угол поворота в 20°
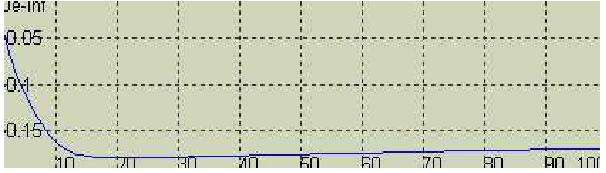
Рисунок 8 --- Реакция крена на угол поворота в 20°
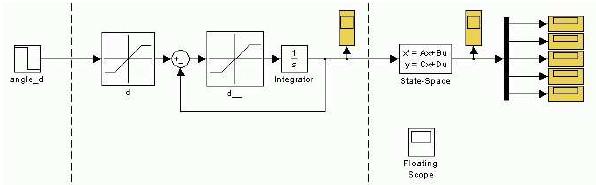
Рисунок 9 --- Исследование модели в программном пакете Simulink.
Параметры управляющих воздействий (графики крена и дифферента, рис.3-8) показывают отсутствие колебательности в переходных процессах, а так же приемлемое время регулирования и перерегулирование для значений крена.
Заключение
При выполнении данной научно-исследовательской работы исследована модель тяжёлого грузового судна, её статические и динамические характеристики, произведён её анализ. Изучены средства программного пакета MATLAB для работы с моделями Control System Toolbox, методами анализа, синтеза и построения результатов. Также был произведён расчёт регулятора модели по функционалу качества, удовлетворяющему условиям μ -синтеза. Также получены собственные числа корректирующего звена, которые обеспечивают требуемые характеристики качества. Был проведён анализ системы через исследование реакции системы на различные управляющие воздействия.
По результатам синтеза получены следующие коэффициенты модального регулятора
![]()
Обобщая результаты моделирования, можно констатировать, что μ - регулятор обеспечивает приемлемое отклонение управление объектом при различных уровнях управляющего воздействия. Отсутствие проявления существенных сингулярностей в системе объясняется физическими соображениями --- регулятор сглаживает существенные всплески в системе.
Приведённые результаты моделирования показывают перспективность применения в системах автоматического управления робастных регуляторов, синтез которых основывается на μ-теории.
Перечень ссылок
1. , , "Теория систем автоматического регулирования", М., "Наука", 1975
2. , "Адаптивное и робастное управление с компенсацией возмущений", СПб.: "Наука", 2003, 282 с.
3. , , "Методы классической и современной теории автоматического управления. Синтез регуляторов систем автоматического управления", В 5 тт., т.3, Изд.2., 2004, 616 с.
