

Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УТВЕРЖДАЮ Директор ИРЭ им. РАН, ____________ «___»__________ 2012 г. |
Научно-техническое обоснование
космического эксперимента «Отработка методов дистанционного зондирования земной поверхности в Р-диапазоне при помощи поляриметрической радиолокационной станции бокового обзора с синтезированной апертурой»
Шифр: «МКС-РСА(Р)
1 Сущность исследуемой проблемы. Краткая история и состояние вопроса
1.1 Сущность исследуемой проблемы
Предлагаемый эксперимент направлен на развитие радиолокационных исследований Земли из космоса. Проведенные спутниковые эксперименты в СССР, США, Европейских странах показали высокую эффективность радиолокаторов с синтезированной апертурой (РСА) для дистанционного зондирования земных ресурсов. Одним из путей дальнейшего развития радиолокационного метода является расширение используемого для этих целей диапазона длин волн, особенно в сторону более низких частот, и соответственно, более длинных длин волн. Самая низкая частота в используемых в настоящее время РСА космического базирования составляет 1,3 ГГц (длина волны 23 см), что относится к L-диапазону. В то же время самолетные исследования, проведенные в России (аппаратура «ИМАРК»), Швеции, Франции, Германии и др. странах, показали перспективность более низкого частотного диапазона (Р-диапазона) для поверхностного и подповерхностного зондирования. Это связано в основном с большей проникающей способностью электромагнитных волн этого диапазона в почвенный слой, растительный, снежный, ледовый покровы, и с возможностью получения данных о характеристиках объектов, расположенных на поверхности и на некоторой глубине.
В последнее десятилетие заметно наметился тренд к изменению привычных условий обитания на Земле:
– резкое сокращение лесных массивов (биомассы лесного покрова), влияющего на углеродный баланс;
– значительное уменьшение водозапаса наземных ледников, сокращение покрытия льдом полярных акваторий;
– изменения направления движения морских вод, например, в крупнейших (Гольфстрим, Куросиво) морских течениях;
– сильное загрязнение отдельных внутренних водоемов (Черное, Каспийское, Азовское морей, озера Байкал).
Использование космического РСА Р-диапазона является весьма перспективным для исследования природной среды и её экологического состояния, об этом свидетельствуют результаты многочисленных самолетных экспериментов, см. следующий раздел.
Условия измерения РСА Р-диапазона с самолета и с платформ космического базирования существенно различаются. При зондировании со спутников возникают ряд трудностей методического и технического характера. Одна из главных связана с необходимостью учета влияния ионосферы при прохождении через неё радиоволн. При распространении радиоволн этого диапазона в ионосфере происходят изменения фазы и плоскости поляризации. Пространственно-временной случайный характер неоднородностей создает трудности учета влияния ионосферы. В нашем случае уникальная возможность для учета влияния ионосферы появляется в связи с проведением на МКС эксперимента «ГЛОНАСС». Получаемые в результате этого эксперимента прямые данные о характеристиках ионосферы могут быть использованы при интерпретации данных РСА Р-диапазона.
1.2 Состояние исследований в настоящее время
В настоящее время самолётные РСА Р-диапазона активно используются в России, Германии, Франции, Швеции и др. странах для исследования земных ресурсов [1-8]. В 90-х годах прошлого столетия предприятием был создан уникальный многочастотный поляриметрический авиационный радиолокационный комплекс дистанционного зондирования с синтезированной апертурой и цифровой адаптивной обработкой информации «ИМАРК» [1]. За создание его была присуждена Государственная премия РФ 2000 года. Комплекс состоял из 4-х РСА, работающих одновременно в X, L, P и VHF частотных диапазонах (длины волн соответственно 4, 23, 68 и 256 см), и был установлен на самолете ТУ-134. Радиолокационный комплекс «ИМАРК» показал широкие возможности его применения в интересах науки и народного хозяйства, он обеспечивал получение высокоинформативных радиолокационных изображений природных объектов, в том числе скрытых гидрометеорами, дымом, слоем растительности, снега, почвы, льда.
Приведем два примера, показывающие информативные возможности применения Р-диапазона для исследования окружающей среды.
На рисунке 1 представлены результаты радиолокационных изображений акватории и побережья Баренцева моря, полученные одновременно в трех диапазонах длин волн при условиях близких к штилю.
Анализ радиолокационных изображений морской поверхности в различных диапазонах длин волн показывает, что стратификация движения морской воды наиболее четко проявляется в P и VHF диапазонах. С теоретической точки зрения полученный результат малопонятен и требует внимательного изучения. Таким образом, с помощью радиолокатора
Р-диапазона значительно повышаются возможности исследования волнения, морских течений, процессов, происходящих в устьях рек, впадающих в моря, и др.
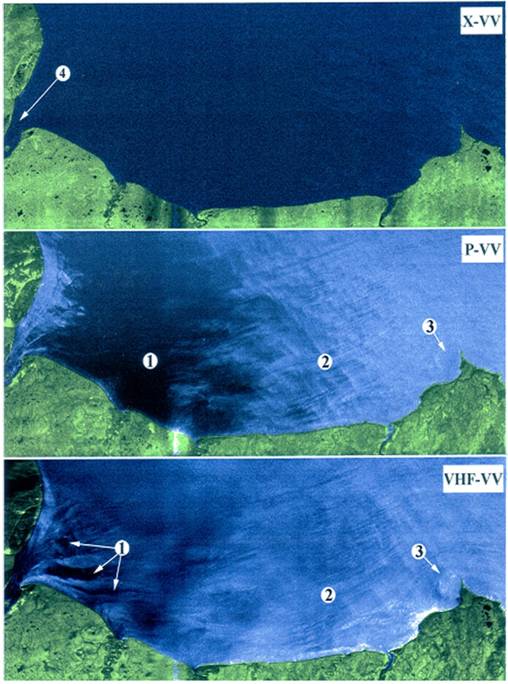
Рисунок 1 – Радиолокационные изображения участка Баренцева моря, полученные одновременно в диапазонах ![]() =4см(VV поляризация),
=4см(VV поляризация),![]() =68см (VV поляризация),
=68см (VV поляризация), ![]() = 254 см(VV поляризация)
= 254 см(VV поляризация)
(1 – район моря с различной соленостью, 2 – область волнения, 3 – вихрь за утесом, 4 – устье реки)
На рисунке 2 приведены радиолокационные изображения и фотографии лесных массивов Московской области. Можно видеть отличия в РЛИ X, P и VHF для разных типов леса.

Рисунок 2 – Радиолокационные изображения лесного массива Московской области: 4 см, HH-поляризация; 68 см, VV-поляризация;
256 см, HH-поляризация (1 – торфяные разработки, 2 – бывшие торфяные разработки, заросшие густым молодым березовым лесом, 3 – берёзовый лес среднего возраста, 4 – заболоченный участок, чахлый и погибший березовый лес, 5 – старый сосновый лес, песок, трава, редкий подлесок)
Р-диапазон является высокоинформативным для изучения леса. Детальный анализ РЛИ показывает сезонную изменчивость обратного радиолокационного отражения, его зависимость от типа и возраста деревьев, влажностного режима растительности и лесного полога, биомассы и др.
Не только акватории и лесные массивы можно эффективно исследовать с помощью РСА Р-диапазона. Многочисленные самолетные эксперименты и теоретические оценки показывают, что Р-диапазон, относящийся к длинным дециметровым волнам, является эффективным средством для исследования почвенного, снежного, ледяного покровов и различного рода загрязнений.
2 Необходимость проведения КЭ в условиях космического пространства в составе РС МКС
В настоящее время нет сведений о зарубежных проектах, направленных на использовании РСА Р-диапазона в спутниковых системах дистанционного зондирования Земли. Есть только сведения, полученные на международных конференциях последних лет, о том, что у ЕКА и НАСА есть достаточно большой интерес к космическим РСА Р-диапазона, и в ряде зарубежных организаций эти аппараты находятся в процессе разработки и лабораторных испытаний. Также во многих докладах на конференциях отмечались большие трудности в создании этого прибора и его работы на космической платформе.
Согласно имеющимся данным, предлагаемый КЭ будет первым по использованию РСА Р-диапазона для задач дистанционного зондирования. Его можно рассматривать как первый этап на пути создания РСА Р-диапазона, предназначенного для глобального мониторинга Земли, без которого нельзя обойтись. Однако использования Р-диапазона с космических аппаратов представляет большие научные и технические трудности. Необходимость проведения КЭ на МКС связана с тем, что на ней одновременно будет проводится КЭ «ГЛОНАС», а также с тем, что возможно в процессе проведения КЭ «МКС РСА(Р)» потребуется дальнейшая доработка и замена с участием космонавтов отдельных элементов и узлов аппаратуры. Для успешного проведения КЭ «МКС РСА(Р)» требуется калибровка аппаратуры, включая антенную систему, с использованием активных и пассивных наземных калибраторов. В первую очередь это связано с учётом влиянием ионосферы на условия распространения электромагнитного излучения, что выше уже обсуждалось.
3 Описание КЭ
3.1 Цель и задачи эксперимента
Целью проведения КЭ «МКС-РСА(Р)» является исследование возможностей дистанционного зондирования земных покровов из космоса с помощью поляриметрических радиолокаторов с синтезированной апертурой в диапазоне длинных дециметровых волн (длина волны около 70 см), что открывает из-за их большой проникающей способности принципиально новые пути изучения поверхности океана, растительного и почвенного покровов.
В процессе проведения КЭ решаются следующие задачи:
– отработка методических вопросов измерения из космоса с помощью РСА Р-диапазона обратного рассеяния точечными и распределенными объектами на земной поверхности и их анализом и тематической интерпретации;
– отработка методических вопросов, связанных с учетом влияния ионосферы на геометрические, радиометрические и поляризационные искажения получаемых данных, связанные с особенностями распространение дециметровых волн, соответствующей их коррекцией;
– отработка методических вопросов, связанных с внешней калибровкой РСА Р-диапазона;
– изучение возможностей оценки параметров волнения, стратификации (включая морские течения) и солености морской поверхности;
– получение данных об отражательной способности хвойных, лиственных и смешанных лесов и оценка возможности их классификации;
– изучение возможностей определения биомассы леса по данным космических измерений путем сопоставления её с результатами наземных тестовых полигонов;
– изучение возможностей получения данных о гидрологическом режиме почвенного покрова;
– исследование возможности оценки характеристик поверхности, находящейся под снежным и ледяным покровами;
– исследование возможностей выявления и изучения крупно - и среднемасштабных поверхностных загрязнений антропогенного происхождения.
3.2 Краткое описание КЭ
Радиолокационная станция бокового обзора с синтезированной апертурой длинноволнового дециметрового диапазона длин волн λ≈69 см
(РСА Р-диапазона) предназначена для получения радиолокационных изображений (РЛИ) подстилающей поверхности Земли. Яркость на РЛИ соответствует отражательной способности исследуемого земного участка. Отражательные характеристики земных поверхностей зависят от их диэлектрической проницаемости, шероховатости и геометрии отражательных элементов. В результате появляется возможность по отражательным характеристикам определять параметры подстилающей поверхности.
Р-диапазон отличается тем свойством, что он обладает повышенной проникающей способностью по сравнению с более высокочастотными X, C, S, L-диапазонами (см и короткие дм-волны). Поэтому открываются новые возможности для исследования верхних слоев земных покровов, т. е. изучить состояние верхних слоев почвы, находящихся под снегом, строение льдов, отражательные характеристики древесины леса под кроной деревьев. Последнее обстоятельство имеет прямое отношение к решению очень важной задачи по определению и мониторингу биомассы леса в глобальном масштабе.
Основной методической задачей при проведении экспериментов с помощью РСА Р-диапазона на МКС является оценка учета влияния ионосферы на разрешающую способность РСА, влияния фарадеевского поворота угла поляризации на точности измерения отражательной способности земных покровов на различных поляризациях. Для проведения таких исследований необходимо привлечение специалистов физического факультета МГУ, МФТИ, Марийского Государственного университета, привлечения результатов по радиотомографии ионосферы, получаемых при проведения эксперимента на МКС «МКС-Глонасс», разработка наземных методов и аппаратуры для проведения калибровки РСА.
В научном плане, при установки опытного образца РСА Р-диапазона на МКС в первую очередь приходится учитывать тот факт, что наклон орбиты составляет 510. Исследования могут проводиться в экваториальной и среднеширотных областях Земли. Однако в район исследования попадают многие объекты, представляющие научный интерес. В частности:
а) Озеро Байкал. В план проведения эксперимента над этим объектов входит: Определение энергетического потенциала РСА. В случае достаточности его для исследования водной поверхности (теоретические оценки показывают, что энергетического потенциала при выбранных параметрах аппаратуры должно хватить), появляется возможность исследования стратификации водных потоков в районах впадения в него рек, загрязнения;
б) Лесные участки Бурятии, Марийской Республики, лесов южной части Красноярского края, лесов Мещеры, в которых имеются наземные полигоны, что позволяет развить методы определения биомассы леса по РЛИ по сопоставлению их с наземными результатами измерений, леса экваториальной Африки и Южной Америки;
в) Охотское море в разные периоды года. В зимний период охотское море замерзает, появляется возможность исследования характеристик морских льдов и их перемещение;
г) Высокая проникающая способность Р диапазона длин волн позволяет исследовать структуру горных ледников (крупных трещин, стратификации верхних слоев) Кавказа, Алтая, Альп, Гималаи (в первую очередь Кавказа и Алтая) под снежным покровом;
д) Исследование особенностей отражательных способностей с целью исследования стратификации водных масс в районах крупных морских течений в первую очередь Куросио и Гольфстрима.
3.3 Порядок проведения КЭ
В штатном режиме КНА работает сеансами по 2-3 мин над выбранными объектами два – три раза в сутки. Полученная научная информация накапливается в блоке сбора и обработки данных, установленного внутри гермоотсека МКС, для последующего сброса на Землю по высокоскоростной линии.
3.4 Принципиальные требования к условиям выполнения КЭ
Исследуемые естественные образования и калибровочные участки (полигоны) должны находиться в поле зрения синтезируемой антенной системы радиолокационной станции.
3.5 Технические особенности КНА
В состав КНА «МКС-РСА(Р)» входят:
– антенная система типа активной фазированной антенной решетки (АФАР);
– базовый блок (ББ);
– блок сбора и обработки данных (БСОД).
АФАР с приемо-передающими модулями и базовый блок собираются и устанавливаются вне гермоотсека на УРМ, блок сбора и обработки данных в гермоотсеке.
4 Новизна, оценка качественного уровня по сравнению с аналогичными отечественными и зарубежными исследованиями
За рубежом большое внимание уделяется использованию самолётных РСА Р-диапазона для изучения влажности почв, биометрических и влажностных характеристик леса, сельскохозяйственных культур, морских льдов, снежного покрова и др. Для этих целей в ФРГ и Франции используются авиационные РСА комплексы PolSAR, (Pol-)InSar [4,7], которые установлены на относительно небольших самолётах. Эти исследования носят региональный характер.
В то же время для решения многих задач, связанных с изменением климата, необходим глобальный мониторинг. Одной из важных задач является изучение динамики и эволюции земной биосферы. В этой проблеме большую (можно сказать, что основную) играет роль неопределенность в распределении запасов углерода, в глобальном углеродном цикле. Связано это с условиями непосредственного использования земных площадей, с процессами потребления углерода лесом. Лесная биомасса является главным хранилищем растительного углерода. Пространственное распределение лесов, их изменений во времени являются критичным для улучшения знаний земного компонента в углеродном цикле. Следовательно, для уменьшении этих неопределенностей необходима, примерно два раза в год, информация: о площади лесов, о запасах биомассы лесных покровов (при пространственном разрешении 100-200 м с точностями лучше, чем 20-30%), о высоте леса и др. Многие самолетные наблюдения тропических лесов, лесов в средних широтах, а также бореальных лесов продемонстрировали, что РСА Р-диапазона имеют уникальные способности для решения этих проблем измерения биомассы в широком диапазоне. При этом измерения биомассы леса можно достичь посредством поляризационных измерений, а высоты с помощью поляризационных интерферометрических измерений. В качестве примера можно привести результаты, полученные в работе [9], которые показывают, что использование поляризационной РСА Р-диапазона, работающей одновременно на поляризациях YY, VV, HV, VH с использованием поляризационной интерферометрии, позволяет решить указанную проблему.
В последние годы на многих Международных конференциях (BioGeoSAR-2007, EUSAR-2006,-2008,-2010, IGARSS-2010) по радиолокации и дистанционному зондированию Земли обсуждался вопрос о разработке РСА космического базирования в Р-диапазоне. При этом отмечалось, что решение его с использованием космических станций наталкивается на серьезные проблемы, в основном связанном с учётом влияния ионосферы и сложностями построения антенной системы.
Создание опытного бортового образца РСА Р-диапазона и установка его на МКС будет иметь для нашей страны приоритетное значение несмотря на то, что в предлагаемый вариант является первым этапом построения полноценного РСА Р-диапазона космического базирования.
5 Ожидаемые результаты и их предполагаемое использование
5.1 В результате проведения предлагаемого КЭ и наземных измерений, обработки и анализа полученного экспериментального материала впервые будут получены следующие результаты:
– отработаны методики измерения, обработки и тематической интерпретации данных о величине и поляризации радиолокационного сигнала Р-диапазона, рассеянного в обратном направлении точечными и распределенными объектами на земной поверхности;
– определены фактические величины геометрических и поляризационных искажений, возникающих благодаря влиянию ионосферы;
– проведена оценка степени эффективности современных аппаратных и программных методик борьбы с шумами и различного рода искажениями, доработаны соответствующие аппаратные и программные технологии;
– отработана методика внешней калибровки РСА Р-диапазона;
– получено представление о частотных, поляризационных и иных предельных ограничениях, определяющих нынешний уровень возможного использования технологий дистанционного зондирования Земли из космоса в дециметровом и метровом диапазонах радиолокации;
– накоплен массив экспериментальных данных об отражательной способности различных типов земных покровов и выделенных объектов в
Р-диапазоне, поддержанных в ряде случаев наземными измерениями;
– проведены комплексные космические и наземные эксперименты на выбранных тестовых полигонах;
– оценена информативность полученных данных о стратификации, волнении и солености морской поверхности;
– оценена точность определения биомассы лесных регионов;
– определена возможность классификации хвойных, лиственных и смешанных лесов;
– проанализированы данные о возможности исследования динамики различных природно-антропогенных систем.
5.2 Перспективы практического использования результатов КЭ
Результаты КЭ представляют большой интерес при решении геофизических и радиофизических задач дистанционного зондирования Земли (ДЗЗ). Накопленные в процессе проведения КЭ данные дистанционного зондирования будут использованы для совершенствования технологий поверхностного и подповерхностного зондирования в Р-диапазоне, в том числе, для исследования лесного и растительного покрова, геоморфологии, поверхностной гидрологии, стратификации вод Мирового океана, ледовой обстановки, экологии и т. д. Важное значение будут иметь данные КЭ о частотных, поляризационных и иных предельных ограничениях, определяющих нынешний уровень возможного использования технологий дистанционного зондирования Земли из космоса в дециметровом и метровом диапазонах радиолокации. На основе полученного опыта на МКС будут определены оптимальные пути разработки и варианты дальнейшего развития конструкций перспективных многочастотных (в сантиметровом, дециметровом и метровом диапазонах длин волн) поляриметрических РСА космического базирования для последующего их штатного использования на серийных ИСЗ в интересах военных и гражданских заказчиков. Дальнейшее развитие указанной технологии позволит перейти к использованию регулярно получаемой спутниковой информации в научных и практических интересах научных и отраслевых институтов, а также подразделениях и службах Росгидромета, Минсельхоза, Минтранса, Министерства природных ресурсов, МЧС РФ.
6 Обоснование технической возможности создания НА с заданными характеристиками
6.1 Радиолокатор с синтезированной апертурой (РСА) Р-диапазона
6.1.1 Блок схема радиолокационной станции бокового обзора с синтезированной апертурой длинноволнового дециметрового диапазона длин волн λ=69 см представлена на рисунке 3.
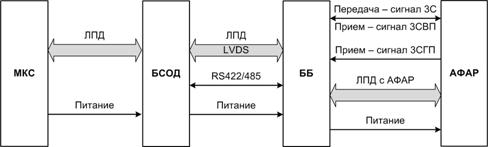
Рисунок 3 – Блок схема РСА
(ЗС – зондирующий сигнал, ЗСВП – зондирующий сигнал с вертикальной поляризацией, ЗСГП – зондирующий сигнал с горизонтальной поляризацией, ЛПД – линия передачи данных)
6.1.2 Антенная система
Антенная система представляет собой активную фазированную антенную решетку (АФАР), состоящую из 36 конструктивных элементов. Каждый элемент представляет собой приемо-передающий модуль, работающий на антенный излучатель. Структурная схема АФАР приведена на рисунке 4.

Рисунок 4 – Структурная схема АФАР
Каждый излучатель имеет два входа. Сигналы, подаваемые на эти входы, излучаются/принимаются с взаимно-перпендикулярной поляризацией.
В состав АФАР входит схема деления и суммирования мощности (СДСМ).
6.1.2.1 Технические характеристики антенной решетки
Решетка дециметрового диапазона длин волн имеет следующие характеристики:
– входное сопротивление 50 Ом;
– рабочий диапазон частот от 432 до 438 МГц;
– поляризация линейная (переключаемая);
– ширина ДН в главных плоскостях 12×12°;
– коэффициент усиления 24 dBi;
– КСВн в рабочей полосе частот, не более 1,5:1;
– габаритные размеры (ВхШ), не более 3600×3600 мм.
6.1.2.2 Характеристики апертуры
Антенная решетка дециметрового диапазона волн представляет собой плоскую решетку патч-излучателей, расположенных в узлах прямоугольной координатной сетки (рисунок 5). Решетка имеет следующие геометрические параметры:
– размер апертуры: квадрат со стороной 3600 мм;
– шаг излучателей Dx=600 мм (0,87·λ0), Dy=600 мм (0,87·λ0) по координатам х и у соответственно;
– общее количество излучателей Nизл=6×6=36;
– центральная рабочая длина волны λ0=0,69 м.
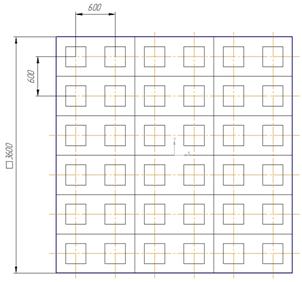
Рисунок 5 – Геометрия решетки
6.1.2.3 Характеристики элемента решетки
Излучатель антенной решетки дециметрового диапазона представляет собой квадратный патч-элемент с размером стороны порядка  с воздушным заполнением (рисунок 6). Высота элемента над экраном составляет примерно HП = 0,05·λ0.
с воздушным заполнением (рисунок 6). Высота элемента над экраном составляет примерно HП = 0,05·λ0.
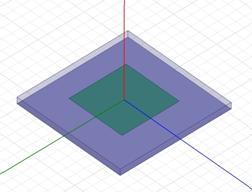
Рисунок 6 – Патч-излучатель
Расчетные характеристики, такие как: входное сопротивление, КСВн и диаграмма направленности такого элемента получены про помощи пакета AnsoftHFSS 13.
На рисунке 7 (а-в) представлены входное сопротивление, КСВн (для 50 Омного тракта), и ДН для плоскостей Е и Н.
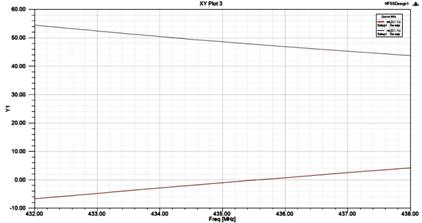
Рисунок 7а – Входное сопротивление патч-излучателя
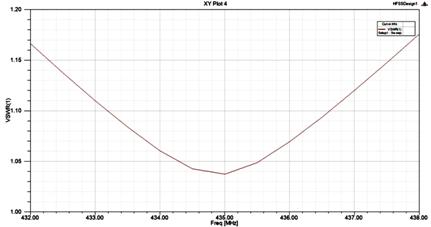
Рисунок 7б – КСВн патч-излучателя
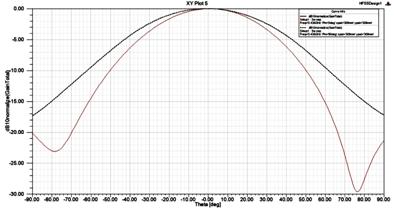
Рисунок 7в – ДН в плоскости Е и Н патч-излучателя
6.1.2.4 Характеристики системы излучателей
Диаграммы направленности всей антенной системы, с учетом ДН отдельного излучателя для равномерного амплитудного распределения и дискрета регулировки фазы в каналах излучателей ![]() (8-разрядный фазовращатель) приведены на рисунках 8-10.
(8-разрядный фазовращатель) приведены на рисунках 8-10.
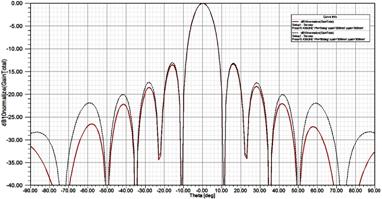
Рисунок 8 – ДН антенной системы, нормальное излучение
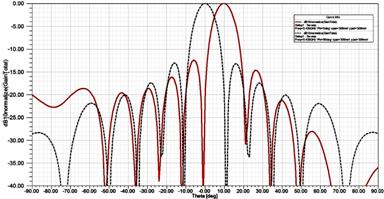
Рисунок 9 – ДН антенной системы, режим сканирования  ,
, 
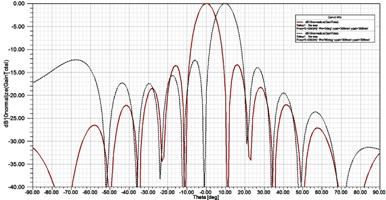
Рисунок 10 – ДН антенной системы, режим сканирования  ,
,
6.1.2.5 Приемо-передающий модуль
Приемо-передающий модуль (ППМ) имеет следующие параметры:
– диапазон рабочих частот от 432 до 438 МГц;
– максимальная импульсная выходная мощность в режиме передачи не менее 1 Вт (уровень выходной мощности задается программно);
– коэффициент усиления в режиме передачи 20±0,2 дБ;
– коэффициент шума в режиме приема не более 2 дБ;
– коэффициент усиления в режиме приема 20±0,2 дБ;
– точность установки фазы передаваемого СВЧ сигнала не более ±3°;
– точность установки фазы принимаемых СВЧ сигналов не более ±3°;
– неидентичность электрических длин передающих и приемных каналов не более ±3°;
– потребляемая мощность не более 5 Вт;
– габаритные размеры, не более 100×250×300 мм.
Блок-схема ППМ приведена на рисунке 11.
ППМ включает следующие узлы:
– передающий модуль (ТМ);
– два приемных модуля (ПМ) для приема сигналов с вертикальной поляризацией (ВП) и горизонтальной поляризацией (ГП);
– входной и выходной коммутаторы (КС1, КС2) СВЧ сигналов;
– узел управления, контроля и электропитания.

Рисунок 11 – Блок схема ППМ
Модуль TM состоит из усилителя мощности, плавного фазовращателя, датчика контроля выходной мощности и фильтра гармоник.
В состав каждого модуля ПМ входят ограничитель, малошумящий усилитель, полосовой фильтр, усилитель и фазовращатель.
Фазовращатели (ФВ), необходимые для формирования диаграммы направленности, имеют дискрет перестройки фазы 1,4°, управление ФВ осуществляется 8-ми разрядным кодом.
Узел управления формирует команды управления ФВ, схемой управления выходной мощностью ТМ и коммутаторами СВЧ сигналов, вводит поправку в коды управления ФВ согласно калибровочным коэффициентам, производит функциональный контроль ППМ и осуществляет обмен информацией с ББ по линии передачи данных.
Калибровочные коэффициенты программируются в каждый ППМ при изготовлении модуля и служат для учета индивидуальных особенностей ППМ. Обмен с ББ осуществляется по протоколу CAN.
Узел электропитания получает от базового блока напряжение питания 28 В и формирует вторичные уровни напряжений питания аппаратуры ППМ, и обеспечивает снятие напряжения питания ТМ в режиме приема.
6.1.2.6 Схема СДСМ
В состав СДСМ входит делитель/сумматор, обеспечивающий разводку СВЧ сигнала на 36 передающих модулей в режиме излучения и суммирование сигналов от 36 модулей приема сигналов с поляризацией ГП.
В состав СДСМ входит сумматор, обеспечивающий суммирование сигналов от 36 модулей приема сигналов с поляризацией ВП.
6.1.3 Базовый блок
6.1.3.1 В состав базового блока входят:
– модуль синхронизатора;
– модуль формирователя зондирующего сигнала;
– модуль управления и контроля;
– модуль приемника.
6.1.3.2 Структурная схема базового блока приведена на рисунке 12.
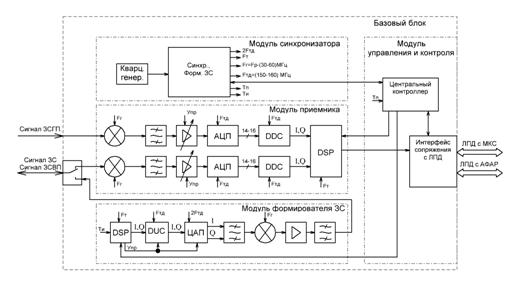
Рисунок 12 – Структурная схема базового блока
6.1.3.3 Базовый блок (ББ) имеет следующие параметры:
– диапазон рабочих частот от 432 до 438 МГц;
– максимальная импульсная выходная мощность в режиме передачи не менее 1 Вт;
– скорость оцифровки данных приемником 48 Мбайт/с;
– потребляемая мощность не более 25 Вт;
– габаритные размеры, не более 200×200×300 мм.
6.1.3.4 Модуль синхронизатора
Модуль синхронизатора состоит из термостабилизированного кварцевого генератора и формирователей гетеродинной частоты, тактовых частот и временных интервалов работы аппаратуры.
6.1.3.5 Модуль формирователя зондирующего сигнала
В основе модуля формирователя зондирующего сигнала (ЗС) лежит цифровой повышающий преобразователь (DUC) и ЦАП, управляемые цифровым сигнальным процессором (DSP).
DSP формирует код модуляции зондирующего сигнала, который в DUC интерполируется (для устранением эффектов квантования), фильтруется и переносится на промежуточную частоту. Выходные квадратурные выборки сигнала ПЧ с DUC поступают на ЦАП, где они преобразуются в напряжения квадратурных составляющих сигнала промежуточной частоты. Квадратурные сигналы в смесителе переносятся в область рабочих частот.
Выходной сигнал фильтруется и усиливается. Уровень выходной мощности задается командой.
6.1.3.6 Модуль приемника
Модуль приемника состоит из двух каналов приема сигналов с разными поляризациями. Каналы приема идентичны и состоят из смесителя, фильтра, регулируемого усилителя, АЦП и понижающего цифрового преобразователя (DDC).
DDC обеспечивает необходимую избирательность приемника.
Сформированные отсчеты принятого сигнала поступают на цифровой сигнальный процессор (DSP), где подвергаются первичной обработке. Затем полученные данные передаются в модуль управления и контроля.
6.1.3.7 Модуль управления и контроля
Модуль управления и контроля обеспечивает управление аппаратурой, функциональный контроль узлов аппаратуры, а так же сопряжение с линией передачи данных МКС и с линией передачи данных АФАР.
Модуль управления и контроля обеспечивает прием информации от навигационной аппаратуры МКС и регистрацию информации функционального контроля и данных, поступающих с приемника.
Регистрируемая информация делится на два вида: служебная и научная. Служебная информация, определяющая состояние работоспособность РСА, по ЛПД поступает на борт МКС и далее, посредством штатной телеметрической системы, передается в ЦУП.
Научная информация и навигационная информация, необходимая для привязки научной информации к месту сбора данных, по ЛПД поступает в БСОД, где записывается виде цифровых массивов на жесткий диск (HDD) блока сбора данных для последующей передачи на Землю в ЦУП.
6.1.4 Блок сбора и обработки данных
6.1.4.1 БСОД устанавливается в ГО РС МКС и предназначен для:
– управления ББ;
– приема массивов научной информации от ББ со скоростью до 400Мбит/с;
– сбора вспомогательной служебной информации для последующего ее включения в формат научных данных;
– получения дискретных (релейных) команд от СУБА/СУБК РС МКС;
– получения временной метки частотой 1 Гц от АСН-М;
– получения баллистико-навигационных данных, КБВ (не реже 1 раза в сутки) и цифровых командных массивов от ИУС по интерфейсу CAN 2.0;
– синхронизации внутреннего времени БСОД с бортовым временем;
– накопления, сжатия и передачи полученных массивов информации в ИУС по интерфейсу Ethernet для последующего сброса (при наличии ресурсов) по каналам связи на Землю.
6.1.4.2 БСОД имеет следующие параметры:
– объем сменного накопителя не менее 512 Гбайт;
– масса не более 15,0 кг;
– потребляемая мощность не более 40 Вт;
– габаритные размеры, не более 300×250×300 мм;
– объем передаваемой информации в РС МКС не более 9,0 Гбайт/сутки.
6.2 Наземная аппаратура
6.2.1 Наземная часть аппаратуры предназначена для отработки работоспособности разработанной аппаратуры с дальнейшим ее использованием в исследованиях плоскости поляризации на трассе МКС –Земля, временных флюктуаций угла вращения.
6.2.2 Блок-схема наземного оборудования представлена на рисунке 13.
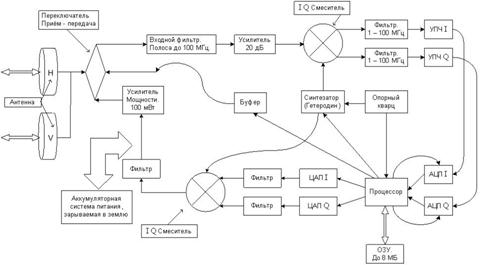
Рисунок 13 – Блок-схема наземного оборудования
7 Характеристики рисков и дискомфорта для экипажа, связанных с КЭ
7.1 В конструкции КНА в части обеспечения безопасности максимально используется положительный опыт создания и эксплуатации аналогичных систем на борту РС МКС, подтвердивший надежность принимаемых конструктивных решений и технологии изготовления.
7.2 При разработке КНА основное внимание в части безопасности уделяется вопросам предотвращения следующих опасностей:
– возможное поражение экипажа электрическим током;
– травма экипажа из-за повышенной/пониженной температуры поверхностей АФУ и ББ;
– травма экипажа о конструкцию блоков КНА;
– возможность возникновения пожара в БСОД;
– выброс хрупких материалов АФАР в обитаемый объем станции;
– повреждение станции или травма экипажа при ВнеКД от соударения элементов АФАР и ББ при сборке и монтаже.
7.3 Выполнение всех требований, задаваемых в программах обеспечения надежности (ПОН) и безопасности (ПОБ), включая экологическую безопасность, позволит минимизировать все риски и дискомфорт для экипажа, связанных с КЭ.
Список цитируемой литературы
1 “IMARC” – Multi-Frequency Airborne Polarimetric Radar System Operating on Board of TU-134A Flying Laboratory for Remote Observations of the Earth’s Surface“, Moscow Scientific Research Institute of Instrument Engineering, MNIIP/VEGA-M Corporation, Russia, 1998, 8pp.
2 O. Frey, F. Morsdorf, E. Meier Tomographic imaging of a forested area by airborne multi-baseline P-band SAR, Sensors, vol.8, no.9, pp., Sep.2008
3 O. Frey, E. Meier 3-D Time-Domain SAR Imaging of Forest Using Airborn Multibaseline Data at L - and P-Bands, IEEE Trans. Geosci. Remote Sens.,vol.49, no.10, pp., Oct.2011
4 Garestier, F., +, Estimation of the Backscatter Vertical Profile of a Pine Forest Using Single Baseline P-Band (Pol-)InSar Data. TGRS Sept. 2
5 Franz J. Meyer Performance Requirements for Ionospheric Correction of Low-Frequency SAR Data, IEEE TGRS, vol. 49, NO. 10, October 2011.
6 R. Y.Qi, Y. Q.Jin, “Analysis of the effects of Faraday rotation on spaceborne polarimetric observations at P-band”, IEEE Trans. Geosci. Remote Sens.,vol.45, no.5, pp., May 2007.
7 Jayanti J. Sharma, Irena Hajnsek, K. P.Papathanassiou, Alberto Moreira, “Polarimetric Decomposition Over Glacier Ice Using Long-Wavelength Airborne PolSAR”, ”, IEEE Trans. Geosci. Remote Sens.,vol.49, no.1, pp.519-535, Jan.2011.
8 K. Scipal, at all“The Biomass Mission – an ESA Earth Explorer Candidate to measure the Biomass of the Earth’s Forests”, IGARSS 2010, International Geoscience and Remote Sensing Symposium, pp.52-55.
9 T. Le Toan, аt all. "The BIOMASS Mission: Mapping global forestbiomass to better understand the terrestrial carbon cycle," Remote Sensing of Environment", 2010.
Научный руководитель КЭ, заведующий лабораторией ИРЭ имени РАН, д. ф.-м. н., профессор _____________ «___»______ 2012 г. | ||
Заведующий кафедрой «Физико-математические проблемы волновых процессов» МФТИ, д. ф-м. н., профессор _____________ «___»______ 2012 г. |
