


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
УДК 621.39
, д. т.н., проф.; , к. т.н., доц.; В., аспірант
АНАЛИЗ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМЫ
ФАЗОВОЙ АВТОПОДСТРОЙКИ С ПРИНЦИПОМ УПРАВЛЕНИЯ
ПО ОТКЛОНЕНИЮ
, , Стась із динамічних характеристик системи фазового автопідстроювання з принципом управління по відхиленню. У серії із 6 статей авторами показана можливість підвищення динамічної точності і швидкодії системи фазового автопідстроювання за допомогою введення в систему розімкненого компенсаційного зв'язку по задавальному впливу (побудови комбінованої системи фазового автопідстроювання) і введення диференціального зв'язку. Ця перша стаття присвячена аналізу динамічних характеристик системи фазового автопідстроювання з принципом управління по відхиленню.
, , В. Анализ динамических характеристик системы фазовой автоподстройки с принципом управления по отклонению. В серии из 6 статей авторами показана возможность повышения динамической точности и быстродействия системы фазовой автоподстройки с помощью введения в систему разомкнутой компенсационной связи по задающему воздействию (построения комбинированной системы фазовой автоподстройки) и введения дифференциальной связи. Данная первая статья посвящена анализу динамических характеристик системы фазовой автоподстройки с принципом управления по отклонению.
Zaytsev G. F., Bulgach V. L., Stas' V. V. Analysis of dynamic characteristics of the automatic phase control system with the principle of rejection control. In a series of 6 articles authors show the capability of increasing the dynamic precision and response speed of automatic phase control system using the introduction of disconnected compensation connection on master control (construction of a combined system of automatic phase control) and differential connection into the system. The given maiden article is dedicated to the analysis of dynamic characteristics of the automatic phase control system with the principle of rejection control.
Системы фазовой автоподстройки (ФАП) предназначены для согласования (идентификации) фаз двух переменных напряжений одинаковой частоты и широко применяются в радиолокации, связи, электротехнике, телемеханике и других областях, где требуется обеспечить синфазность напряжений.
Схема системы фазовой автоподстройки изображена на рис.1,а [1]. Эта система представляет собой следящую систему с принципом управления по отклонению [1, 2], задающим воздействием которой является разность фаз ![]() входных напряжений
входных напряжений ![]() и
и ![]() , а управляемой величиной – фаза
, а управляемой величиной – фаза ![]() , вносимая фазовращателем ФВ в напряжение
, вносимая фазовращателем ФВ в напряжение ![]() . Задача системы состоит в том, чтобы фаза
. Задача системы состоит в том, чтобы фаза ![]() , вносимая фазовращателем ФВ, более точно воспроизводила в общем случае изменяющуюся во времени разность фаз
, вносимая фазовращателем ФВ, более точно воспроизводила в общем случае изменяющуюся во времени разность фаз ![]() напряжений и тем самым обеспечивала их синфазность.
напряжений и тем самым обеспечивала их синфазность.
Анализ устойчивости системы фазовой автоподстройки
Математическая модель системы фазовой автоподстройки изображена на рис.1,б [1]. На рисунке передаточные функции фазового дискриминатора ФД с фильтром Ф – ![]() , усилителя У – , интегратора И – , фазовращателя ФВ –
, усилителя У – , интегратора И – , фазовращателя ФВ –  описываются следующими выражениями:
описываются следующими выражениями:
![]() (1)
(1)
где 
 |
Согласно математической модели (рис.1,б) передаточная функция системы ФАП в разомкнутом состоянии определяются выражением
![]() (2)
(2)
где  – коэффициент усиления системы в разомкнутом состоянии.
– коэффициент усиления системы в разомкнутом состоянии.
Для исследования устойчивости системы воспользуемся методом логарифмических частотных характеристик. Согласно (2) комплексная передаточная функция системы ФАП в разомкнутом состоянии
 (3)
(3)
где  (4)
(4)
![]() . (5)
. (5)
Выражение для логарифмической амплитудно-частотной характеристики (ЛАЧХ) системы:
![]() (6)
(6)
Частота сопряжения ![]()
В соответствии с (6) на рис.2 построена ЛАЧХ системы ![]() .
.
Расчеты для фазо-частотной характеристики в соответствии с (5) сведены в табл. 1.
Табл.1.
| -900 |
|
|
|
1 | -900 | 0.002 | -0.114 | -90.114 |
10 | -900 | 0.02 | -1.145 | -91.145 |
50 | -900 | 0.1 | -5.71 | -95.71 |
100 | -900 | 0.2 | -11.31 | -101.31 |
200 | -900 | 0.4 | -21.8 | -111.8 |
1000 | -900 | 2 | -63.43 | -153.43 |
3000 | -900 | 6 | -80.53 | -170.53 |
10000 | -900 | 20 | -87.13 | -177.13 |
В соответствии с расчетными данными табл.1 на рис.2 построена фазо-частотная характеристика системы ![]() .
.
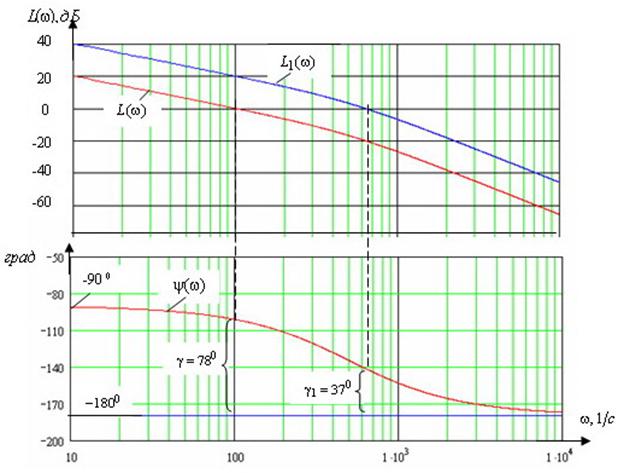
Рис.2. Логарифмические частотные характеристики ФАП
Из логарифмических частотных характеристик (рис.2) следует, что система фазовой автоподстройки устойчива и имеет запас устойчивости по фазе  .
.
Динамические ошибки системы ФАП с принципом управления по отклонению
Передаточная функция по ошибке системы ФАП ![]() .
.
Подставив значение ![]() из (2), получим
из (2), получим
 (7)
(7)
или ![]() 8)
8)
где ![]()
Из (8) видно, что система ФАП имеет астатизм первого порядка.
Определим установившиеся динамические ошибки системы при ступенчатом, линейном и квадратичном законах изменения задающего воздействия:
![]() ;
; ![]() ;
; ![]() .
.
Изображение ошибки системы в соответствии с (8) определяется выражением
 . (9)
. (9)
Установившаяся динамическая ошибка ![]() системы в соответствии с теоремой операционного исчисления о конечном значении функции равна [2, 3]
системы в соответствии с теоремой операционного исчисления о конечном значении функции равна [2, 3]
 (10)
(10)
или, подставив в (10) значение ![]() из (9),
из (9),
 . (11)
. (11)
При изменении задающего воздействия по закону ступенчатой функции ![]() установившуюся ошибку получим, если в формулу (11) подставим значение изображения задающего воздействия
установившуюся ошибку получим, если в формулу (11) подставим значение изображения задающего воздействия ![]() и значение передаточной функции системы по ошибке из (8)
и значение передаточной функции системы по ошибке из (8)
 . (12)
. (12)
Если задающее воздействие изменяется по линейному закону ![]() , то установившуюся динамическую ошибку получим, подставив в (11) изображение задающего воздействия
, то установившуюся динамическую ошибку получим, подставив в (11) изображение задающего воздействия ![]() ,
,
 , (13)
, (13)
где ![]() - коэффициент усиления системы в разомкнутом состоянии.
- коэффициент усиления системы в разомкнутом состоянии.
Например, при 
 (14)
(14)
Если задающее воздействие изменяется по закону квадратичной функции (с постоянным ускорением)  , изображение которого имеет вид
, изображение которого имеет вид
![]() ,
,
то ошибка равна в установившемся режиме стремится к бесконечности
 . (15)
. (15)
Из формул (12)-(15) следует, что в существующей системе ФАП с принципом управления по отклонению, имеющей астатизм первого порядка, установившаяся ошибка при ступенчатом изменении задающего воздействия равна нулю, при линейном изменении ![]() динамическая ошибка ограничена конечным значением (
динамическая ошибка ограничена конечным значением (![]() ), а при квадратичном законе изменения
), а при квадратичном законе изменения ![]() ошибка стремится к бесконечности.
ошибка стремится к бесконечности.
Как видно из (13), для уменьшения скоростной ошибки следует повышать коэффициент усиления ![]() системы в разомкнутом состоянии. Однако, при увеличении
системы в разомкнутом состоянии. Однако, при увеличении ![]() уменьшается запас устойчивости системы по фазе. Например, при увеличении
уменьшается запас устойчивости системы по фазе. Например, при увеличении ![]() от 100 до 1000 (ЛАЧХ при
от 100 до 1000 (ЛАЧХ при ![]() на рис.1 изображена ломаной
на рис.1 изображена ломаной ![]() ) запас устойчивости системы по фазе уменьшается от
) запас устойчивости системы по фазе уменьшается от ![]() до
до ![]() .
.
При дальнейшем увеличении ![]() система приближается к границе устойчивости, т. е. в рассматриваемой системе с принципом управления по отклонению имеет место противоречие между условиями повышения динамической точности и устойчивостью и поэтому приходится принимать компромиссное решение.
система приближается к границе устойчивости, т. е. в рассматриваемой системе с принципом управления по отклонению имеет место противоречие между условиями повышения динамической точности и устойчивостью и поэтому приходится принимать компромиссное решение.
Определенного уменьшения установившейся ошибки можно добиться с помощью различных корректирующих устройств [3]. Однако последние не снимают указанного выше противоречия и необходимости в компромиссной настройке системы.
Среднеквадратическая ошибка системы ФАП с принципом управления по отклонению
Определим точность системы ФАП, когда задающее воздействие ![]() (разность фаз напряжений) является случайной функцией. При случайном задающем воздействии
(разность фаз напряжений) является случайной функцией. При случайном задающем воздействии ![]() управляемая величина
управляемая величина ![]() (управляемый сдвиг напряжения
(управляемый сдвиг напряжения ![]() по фазе) и ошибка
по фазе) и ошибка ![]() системы также являются случайными функциями. При статистическом методе анализа динамическая точность системы определяется среднеквадратическим значением ошибки (СКО).
системы также являются случайными функциями. При статистическом методе анализа динамическая точность системы определяется среднеквадратическим значением ошибки (СКО).
При случайном задающем воздействии ![]() , имеющем спектральную плотность
, имеющем спектральную плотность ![]() , спектральная плотность ошибки определяется с помощью выражения [3]
, спектральная плотность ошибки определяется с помощью выражения [3]
 , (16)
, (16)
где ![]() – комплексная передаточная функция системы по ошибке.
– комплексная передаточная функция системы по ошибке.
Зная спектральную плотность ошибки ![]() , можно определить среднее значение квадрата (дисперсию) ошибки
, можно определить среднее значение квадрата (дисперсию) ошибки
 . (17)
. (17)
Среднеквадратическое значение ошибки
 . (18)
. (18)
Пусть спектральная плотность задающего воздействии ![]() определяется выражением
определяется выражением
 где
где ![]() . (19)
. (19)
Спектральную плотность ошибки системы получим, если в формулу (16) подставим значения комплексной передаточной функции из (8) (подставив ![]() ), а
), а ![]() из (19)
из (19)
 . (20)
. (20)
Среднее значение квадрата ошибки в соответствии с (17)
 (21)
(21)
Приведем интеграл (21) к табличному виду
 , (22)
, (22)
где ![]() ;
; ![]() . Для этого знаменатель (
. Для этого знаменатель (![]() ) спектральной плотности
) спектральной плотности ![]() вводим под знак квадрата модуля и вычислим значение модуля в квадрате в числителе
вводим под знак квадрата модуля и вычислим значение модуля в квадрате в числителе
 , (23)
, (23)
где ![]()
![]()
![]()







Значение табличного интеграла [4]
 , (24)
, (24)
где  ;
;  .
.
Подставив в (24) значения М4,![]() и
и ![]() , получим среднее значение квадрата ошибки
, получим среднее значение квадрата ошибки
![]()
![]() .
.
СКО системы
 . (25)
. (25)
Показатели качества переходных процессов системы ФАП с принципом управления по отклонению
Переходный процесс системы определим с помощью метода разложения ошибки на элементарные дроби [ 3 ].
Характеристическое уравнение системы в соответствии с (8)
 (26)
(26)
или после подстановки значений коэффициентов из (8)
 .
.
Корни характеристического уравнения системы
 (27)
(27)
Переходная составляющая ошибки
 , (28)
, (28)
где начальное значение i-ой компоненты переходной составляющей при единичном ступенчатом изменении задающего воздействия
![]()
![]() .
.
Подставив в последнюю формулу значения коэффициентов и корней ![]() , получим соответственно
, получим соответственно ![]()
Проверяем правильность вычисленных значений ![]() , т. е. начальное значение переходной составляющей ошибки равно начальному значению задающего воздействия.
, т. е. начальное значение переходной составляющей ошибки равно начальному значению задающего воздействия.
Подставив в (28) значения корней из (27) и найденные значения ![]() получим переходную составляющую ошибки
получим переходную составляющую ошибки
 .
.
Компоненты переходной составляющей ошибки изображены на рис.3 кривыми 1, 2 соответственно, а переходная составляющая ошибки ![]() – кривой 3. Согласно кривой 3 время переходного процесса при единичном скачке задающего воздействия
– кривой 3. Согласно кривой 3 время переходного процесса при единичном скачке задающего воздействия ![]() , перерегулирование
, перерегулирование ![]() .
.
 Таким образом, анализ динамических характеристик системы фазовой автоподстройки с принципом управления по отклонению показал, что она устойчива и имеет достаточный (78 град.) запас устой-чивости по фазе, является системой с астатизмом первого порядка. Динамическая ошибка при ступенчатом изменении задающего воздействия (разности фаз входных напряжений) равна нулю, при линейном изменении
Таким образом, анализ динамических характеристик системы фазовой автоподстройки с принципом управления по отклонению показал, что она устойчива и имеет достаточный (78 град.) запас устой-чивости по фазе, является системой с астатизмом первого порядка. Динамическая ошибка при ступенчатом изменении задающего воздействия (разности фаз входных напряжений) равна нулю, при линейном изменении ![]() динамическая ошибка ограничена конечным значением, а при квадратичном законе изменения
динамическая ошибка ограничена конечным значением, а при квадратичном законе изменения ![]() ошибка стремится к бесконечности, среднеквадратическая ошибка
ошибка стремится к бесконечности, среднеквадратическая ошибка  , время переходного процесса
, время переходного процесса ![]()
![]() .
.
Выводы. Показано, что в существующих системах ФАП, построенных на основании принципа управления по отклонению, имеет место противоречие между условиями повышения динамической точности и устойчивости, являющееся препятствием на пути повышения точности этих систем и объясняющее сравнительно низкие их показатели качества.
Литература
1. , Стеклов системы автоматического управления высокой точности. –Київ: Технiка, 1988.–160.с.
2. Зайцев следящих систем высокой точности. – Київ: Техніка, 1971. – 204 с.
3. , , Булгач . – Київ: ООО “ДВК”, 2004. – Том 1. –524 с. – Том 2. – 476 с.
4. М, Менский автоматические системы. –Москва: Машиностроение, 1982. – 505 с.
