


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Таблица 2 –Номинальная статическая характеристика (НСХ) для медных термопреобразователей сопротивления ТСМ градуировки 100М, R0 =100 Ом, α=0,00428 °С-1
Сопротивление Rt ТС при температуре t, Ом | ||||||||||
t, °C | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 | 100,00 104,28 108,56 112,84 117,12 121,40 125,68 129,96 134,24 138,52 142,80 147,08 151,36 155,64 159,92 164,20 168,48 172,76 177,04 181,32 185,60 | 100,43 104,71 108,99 113,27 117,55 121,83 126,11 130,39 134,67 138,95 143,23 147,51 151,79 156,07 160,35 164,63 168,91 173,19 177,47 181,75 | 100,86 105,14 109,42 113,70 117,98 122,26 126,54 130,82 135,10 139,38 143,66 147,94 152,22 156,50 160,78 165,06 169,34 173,62 177,90 182,18 | 101,28 105,56 109,84 114,12 118,40 122,68 126,96 131,24 135,52 139,80 144,08 148,36 152,64 156,92 161,20 165,48 169,76 174,04 178,32 182,60 | 101,71 105,99 110,27 114,55 118,83 123,11 127,39 131,67 135,95 140,23 144,51 148,79 153,07 157,35 161,63 165,91 170,19 174,47 178,75 183,03 | 102,14 106,42 110,70 114,98 119,26 123,54 127,82 132,10 136,38 140,66 144,94 149,22 153,50 157,78 162,06 166,34 170,62 174,90 179,18 183,46 | 102,57 106,85 111,13 115,41 119,69 123,97 128,25 132,53 136,81 141,09 145,37 149,65 153,93 158,21 162,49 166,77 171,05 175,33 179,61 183,89 | 103,00 107,28 111,56 115,84 120,12 124,40 128,68 132,96 137,24 141,52 145,80 150,08 154,36 158,64 162,92 167,20 171,48 175,76 180,04 184,32 | 103,42 107,70 111,98 116,26 120,54 124,82 129,10 133,38 137,66 141,94 146,22 150,50 154,78 159,06 163,34 167,62 171,90 176,18 180,46 184,74 | 103,85 108,13 112,41 116,69 120,97 125,25 129,53 133,81 138,09 142,37 146,65 150,93 155,21 159,49 163,77 168,05 172,33 176,61 180,89 185,17 |
Из таблицы видно, что изменение температуры от 0 до 100 °C увеличивает сопротивление в 1, 4280 раза, на 10 °C – в 1,0428 раза, а на 1 °C – в 1,0043 раза. Из этого анализа следует, что для точного измерения температуры необходимо очень точно измерять сопротивление. Например, что бы обеспечить погрешность измерения температуры 1°C, необходимо измерять сопротивление с погрешностью 0,2 %. В качестве вторичных приборов, в зависимости от требуемой погрешности измерения, используют логометры магнитоэлектрические, автоматические уравновешенные мосты и мосты одинарные.
Замечания: а) Для измерения сопротивления вторичные приборы пропускают через термосопротивление ток. Этот ток не должен превышать 5 мА. Ток больше 5 мА нагреет термосопротивление, что вызовет дополнительную погрешность. б) Сопротивление проводов, соединяющих термосопротивление с вторичным прибором, входит в измерительную цепь и поэтому вносит дополнительную погрешность. Для ее уменьшения соединяющую линию выполняют 3-х или 4-х проводной. Дополнительные провода включают в измерительную цепь так, что сопротивление основных проводов и их изменение от температуры окружающей среды исключаются из измерительной цепи либо компенсируются.
Чувствительными элементами полупроводниковых термометров сопротивления (термисторов) являются смеси окислов металлов. Смеси двух-трех окислов со связывающими добавками измельчают, спекают и обжигают, придавая им форму небольших цилиндриков, шайбочек или бусинок (рис.4). В торцы чувствительных элементов вжигают контакты. При увеличении температуры термометра его сопротивление резко уменьшается согласно зависимости:, ![]() ,
,
где R - значение сопротивления при 293 К; Т - температура, К; В - постоянная, зависящая от свойств полупроводникового материала, К.
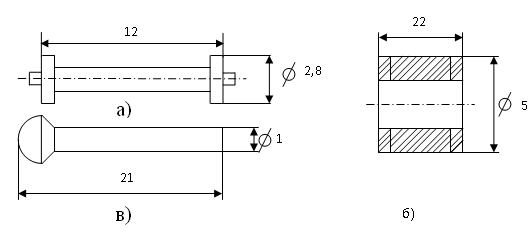
Рис.4 Конструктивные формы полупроводниковых термометров сопротивления. а) трубчатая (КМТ); б) дисковая (СТ5); в) цилиндрическая (ММС).
Серийно изготовляемые термисторы предназначены для измерений температур в диапазоне от -90 до +180 °С. Их погрешность существенно больше погрешности металлических термосопротивлений.
Практические указания для выполнения работы.
1. Дома изучить приведенные выше теоретические положения и настоящий раздел.
2. В лаборатории ознакомиться с конструкцией и метрологическими характеристиками медного термопреобразователя сопротивления подвергаемого градуировки и заполнить таблицу «Перечень приборов».
3. Установить преобразователь в печь так, чтобы его чувствительный элемент находился рядом с эталонным термометром и подключить его по двухпроводной схеме к мосту одинарному типа МО-62. Схема подключения приведена на крышке моста. В качестве эталона в печи установлен стеклянный жидкостный термометр с ценой деления 0,2 °С.
4. С помощью автотрансформатора медленно изменять напряжение на нагреватели печи и когда температура стабилизируется, измерить мостом сопротивление Rt* термопреобразователя и одновременно по показаниям эталона измерить действительное значение температуры td . Записать показания приборов в таблицу 3 при температуре окружающей среды, 50, 70 и 90 °С (примерно). ПРЕДОСТЕРЕЖЕНИЕ!!! Не поднимать температуру выше 100 °С.
5. Из таблицы 2 по Rt* определить измеренную термосопротивлением температуру t, вычислить погрешность измерения по уравнению . Сравнить фактическую погрешность измерения Δt с допустимой Δtd (из таблицы 1) и сделать вывод о пригодности термосопротивления к применению.
6. По данным таблицы 3 на одном графике построить номинальную статическую характеристику t(Rt*) и градуировочную характеристику td(Rt*) термосопротивления.
Таблица 3
Rt* , Ом | ||||
td , | ||||
t | ||||
|
Контрольные вопросы для самопроверки.
1. Принцип действия термопреобразователя сопротивления (термосопротивления).
2. Назначение термопреобразователя сопротивления.
3. Конструкция термопреобразователя сопротивления.
4. Что называют термистором?
5. Чем отличается нормированная статическая характеристика от градуировочной?
6. Чему равен диапазон измерения термопреобразователя сопротивления?
7. Чему равна допустимая погрешность термопреобразователя сопротивления?
8. С какой целью термосопротивление соединяют со вторичным прибором тремя или четырьмя проводами?
И Н С Т Р У К Ц И Я
к лабораторной работе №58
Компьютерные измерения
План РАБОТЫ
1. Ознакомление с проблемами компьютерных измерений.
2. Способы компьютерных измерений.
3. Компьютерная проверка явления электромагнитной индукции.
ОСНОВНЫЕ ТЕОРЕТИЧЕСКИЕ ПОЛОЖЕНИЯ
Компьютерные измерительные системы могут воспринимать информацию от окружающей среды только в цифровом виде. Однако, в настоящее время большинство измерительных приборов, первичных измерительных преобразователей (датчиков) выдают измерительную информацию в аналоговом виде. Чтобы современные системы воспринимали аналоговые сигналы необходимо их преобразовать в цифровой вид – кодированные сигналы. Такие устройства преобразования называют интерфейсными устройствами. По сути, они являются аналого-цифровыми преобразователями (АЦП). Кроме того для работы компьютера необходимо программное обеспечение, позволяющее как обрабатывать сигналы, поступающие от интерфейса, представлять полученную информацию на мониторе в желаемом виде, так и управлять объектами автоматизации в режиме реального времени.
На рисунке 1 представлен компьютерный измерительный комплекс, включающий датчик измеряемой физической величины, компьютер, устройство сопряжения датчика с компьютером (интерфейс - АЦП) и программное обеспечение.

Рисунок 1. Схема компьютерного измерительного комплекса с аналоговым датчиком. Стрелками на рисунке обозначены направления информационных потоков
При решении измерительных задач, если нет необходимости в получении максимально быстродействия, можно использовать языки программирования высокого уровня легкодоступные для понимания. Программа должна включать следующие части, имеющие различное функциональное назначение: 1) блок, обеспечивающий связь с измерителем; 2) управляющий блок; 3) визуализирующий блок (рисунок 2).
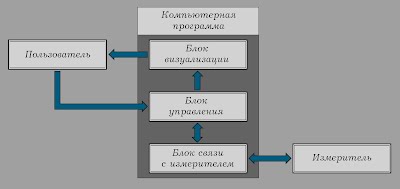
Рисунок 2. Структура информационных потоков при работе с программой для компьютерного измерителя.
Программирование измерительного комплекса сводится к обработке цифрового сигнала АЦП на основе входных-выходных характеристик используемых датчиков. Кроме того нужно обеспечить совместную работу блоков программного обеспечения и дополнительных аппаратных устройств, а также скомпоновать модули программы в один пакет, обладающий максимальным удобством для пользователя. Для измерений вполне может пригодиться программа, составленная на языке программирования Borland Pascal 7.0, которая приведена в приложении А к настоящей работе.
Принцип действия и конструкция устройства сопряжения, в нашем случае АЦП, зависят от COM-порта компьютера, на который будет приходить сигнал от АЦП. В свою очередь правильный выбор архитектуры используемых интерфейсов обуславливает отсутствие проблем при разработке измерительного комплекса. За основу при классификации интерфейсов часто принимается критерий параллельности-последовательности передачи данных от измерительного устройства к компьютеру. В параллельном интерфейсе каждый сигнал передается по отдельной линии. Линии могут делиться на группы: шина данных, шина адреса, шина управления. Временное разделение в передаче информации применяется на уровне смены адреса и переключения направлений передачи данных. Шина данных представляет собой несколько линий, количество которых зависит от количества разрядов интерфейса. Важное ограничение при применении параллельных интерфейсов — это длина линий связи. Реализация длинных линий свыше нескольких метров при высокой пропускной способности невозможна по техническим или экономическим причинам. В отличие от параллельных, последовательные интерфейсы не имеют шин адреса, данных и управления. Преимущество таких интерфейсов в простоте коммутации, возможности создания более длинных линий связи и дешевизне. Вся информация передается по единому информационному каналу. Он может состоять всего из одной сигнальной линии и общего провода Существенный недостаток в этом случае — это необходимость синхронизации портов через информационный канал. Последовательные интерфейсы типов RS232, RS485 и RS422 изготавливаются серийно и применяются уже достаточно долго, поэтому именно для них разработано большое количество компьютерных приборов и программ.
В нашей работе применяется изготовленный студентами последовательный интерфейс на базе микросхемы TLC1549, которая представляет собой десятиразрядный АЦП. Его схема приведена на рисунке 3. Он применяться как устройство сопряжения аналоговых датчиков с компьютером. АЦП может быть подключен к COM-порту или к USB-шине компьютера с помощью адаптера USB-COM (USB to Serial Adapter) или кабеля DB9M-DB9F. В случае подключения устройства к USB-шине необходимо будет установить специальную программу-драйвер для создания виртуального COM-порта, которая обычно поставляется производителем адаптера вместе с ним.
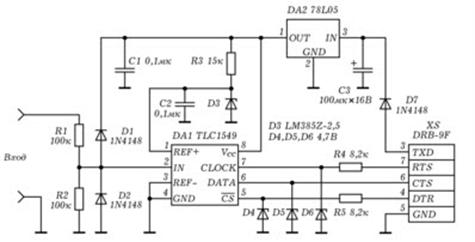
Рисунок 3. Принципиальная схема аналого-цифрового преобразователя на базе микросхемы TLC1549.
Описание схемы. Микросхема имеет один аналоговый вход IN. АЦП формирует на выходе напряжение от 0 до 5 В, а рабочие уровни напряжений на выводах последовательного порта составляют около 12 В. Для решения этой проблемы применены три стабилитрона D4, D5, D6 на напряжение 4,7 В и два резистора R4, R5 по 8,2 кОм каждый. Интегральный стабилизатор DA2 типа 78L05 формирует напряжение 5 В из сигнала линии TXD. Перед ним в схему включен импульсный диод D7. Входное напряжение такого АЦП не должно превышать 5 В, с учетом входного делителя R1/R2. Погрешность измерения напряжения равна 0,005 В. АЦП предназначен для работы с входными напряжениями в диапазоне от 0 В до так называемого опорного напряжения 2.5 В. Если вывод REF - микросхемы TLC1549 подключен к выводу GND, то напряжение на входе IN окажется меньше напряжения на входе REF - и оно преобразуется на выходе в код, соответствующий нулю (). Если напряжение на входе IN большее напряжения на входе REF+, то оно преобразуется на выходе в число 1.
Принцип действия АЦП поясняют временные диаграммы протокола связи АЦП, представленные на рисунке 4.
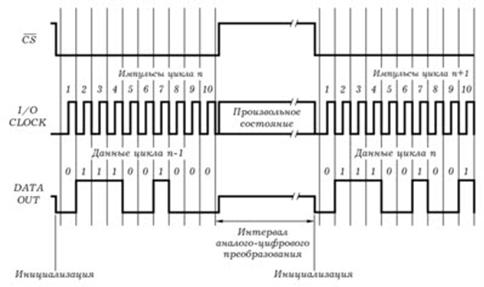
Рисунок 4. Временные диаграммы протокола связи АЦП
При переходе сигнала на выводе CS микросхемы от высокого уровня к низкому уровню в регистр вывода данных помещается результат предыдущего преобразования. По этой причине после подключения устройства необходимо сначала выполнить пустое преобразование, и, следовательно, первое считанное значение выходного кода будет неверным. Каждый бит данных может быть считан на выводе DATA OUT: биты выводятся старшими разрядами вперед. Вывод осуществляется по переднему фронту импульсов на выводе I/O CLOCK. На инверсном выводе CS должен быть высокий уровень сигнала в течение всего времени преобразования (несколько десятков микросекунд).
Конструктивно АЦП выполнен на печатной плате, представленной на рисунке 5, а его внешний вид – на рисунке 6.
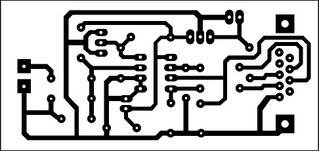
Рисунок 5. Топологическая схема печатной платы

Рисунок 6. АЦП в бескорпусном варианте исполнения.
Практические указания для выполнения работы.
1. Дома изучить приведенные выше теоретические положения и настоящий раздел.
2. В лаборатории ознакомиться с конструкцией АЦП, компьютерного измерительного комплекса и аналогового датчика. 3. В работе предлагается экспериментально исследовать явления электромагнитной индукции.
Необходимое оборудование.
Компьютерный измерительный комплекс, 2 кольцеобразных магнита, катушка (числом витков 6580 провода ПЭЛ диаметром 0,16 мм, от пускателя), гальванический элемент на 1,5 В или аккумулятор на 1,2 В, соединительные проводники.
Программное обеспечение.
В опытах используется программа "Цифровой вольтметр" или “Осциллограф “, приведенная в Частота измерений - "50 измерений в секунду".
Теория. Суть явления электромагнитной индукции состоит в том, что при всяком изменении магнитного потока Ф, пронизывающего какой-либо контур (проводник), вне зависимости от того чем вызвано изменение потока, в контуре (проводнике) наводится электродвижущая сила, равная
![]()
где w- количество витков катушки, штук, dФ/dt- скорость изменения магнитного потока, Вб/с.
Эксперимент. 1) В первом опыте приведем пример обнаружения ЭДС электромагнитной индукции. Подключим последовательно соединенные, аккумулятор и катушку к АЦП, (минус аккумулятора к минусу вольтметра). Расположив катушку вертикально, расположим магнит неподвижно рядом с катушкой или положим на нее. Вольтметр покажет постоянное напряжение аккумулятора. Быстро перемещая магнит вблизи катушки обнаружим изменение показания вольтметра, которое вызвано возникновением э. д.с. в катушке. Показание вольтметра могут увеличиваться или уменьшаться. Это зависит от направления э. д.с. по отношению к напряжению аккумулятора, которое определяется движением магнита «к» или «от» катушки. Изменим эксперимент, оставляя магнит неподвижным, перемещая вблизи него катушку. Результаты эксперимента занести в таблицу 1.
Таблица 1.
Условия эксперимента | Взаимная неподвижность | Движение магнита/катушки к катушке/магниту | Движение магнита/катушки от катушки/магнита |
Показания вольтметра, В |
Установить влияние скорости движения магнита и наличия ферромагнитного сердечника в катушке на показание вольтметра.
Пояснения: 1.
Поверхность стола при эксперименте не должна быть ферромагнитной.
Напряжение аккумулятора смещает ось отсчета наведенной э. д.с. вверх по оси координат.
Это позволяет измерять отрицательные э. д.с., так как вольтметр предна-значен для измерения только положительных значений постоянных напряжений.
Контрольные вопросы для самопроверки.
1. Почему на компьютер нельзя подавать аналоговые сигналы?
2. Какие сигналы воспринимает (понимает) компьютер?
3. Что такое АЦП?
4. Кроме АЦП и компьютера, что еще нужно чтобы создать компьютерный вольтметр?
5. Что такое последовательный интерфейс?
6. Преимущества и недостатки последовательного интерфейса.
7. Преимущества компьютерных измерений.
8. Явление электромагнитной индукции.
9. От чего зависят знак и значение э. д.с. электромагнитной индукции?
ПРИЛОЖЕНИЕ А
Программа «ОСЦИЛЛОГРАФ» для 10-разрядного АЦП на базе TLC1549
Program Osc10Bit; В качестве операционной системы может выступить как MS-DOS, так и системы семейства Windows (95, 98, XP).
Можно использовать и другие программы, приведенные на сервере www. *****, а так же использовать собственные разработки.
{Подключение стандартных модулей подпрограмм}
Uses Crt, // Модуль подпрограмм управления режимами работы дисплея
Graph; // Модуль подпрограмм управления графическим выводом
{Описание переменных}
Var n, // Разрядность АЦП
e : Byte; // Переменная для обработки данных
j, // Переменная цикла
Driver, // Тип графического видеоадаптера
Mode, // Режим работы видеоадаптера
Base: Integer; // Базовая переменная для номера порта
d : Real; // Напряжение на выходе АЦП
{Описание констант}
Const c=1; {Поправочный коэффициент}
{Процедура инициализации графического режима}
Procedure CreateGraphics;
Begin
ClrScr; // Очистка экрана
Driver:=Detect; // Автоматическое определение типа адаптера
InitGraph(Driver, Mode, 'c:\bp\bgi'); // Инициализация графического режима
End;
{Процедура инициализации COM-порта}
Procedure InitCOM;
Begin
n:=10; // Задание разрядности АЦП
Base:=$3F8; // Присвоение базовой переменной номера порта COM1
Port[Base+4]:=1; // Установка в DTR режима передачи
Delay(100); // Задержка в 100 мс
Port[Base+3]:=64; // Настройка порта
Delay(500); // Задержка в 500 мс
End;
{Процедура устранения мерцания монитора}
Procedure RemoveFlicker;
Begin
Repeat
Until Port[$3DA] And 8 <> 0;
Repeat
Until Port[$3DA] And 8 = 0;
End;
{Процедура обработки данных на выходе АЦП}
Procedure CollectData;
Var i: Integer; // Переменная цикла
Begin
d:=0; // Обнуление переменной d
Port[Base+4]:=0; // Сброс всех выходов порта
For i:=0 To n-1 Do
Begin
Port[Base+4]:=2; // Установка +12 В на выходе RTS
e:=Port[Base+6] And 16; // Присвоение переменной e состояния CTS
Port[Base+4]:=0; // Сброс всех выходов порта
If e=16 Then d:=d+exp((n-1-i)*ln(2)); // Расчет d при условию, что e=16
End;
d:=5*c*d/(exp((n)*ln(2))-1); // Окончательный расчет d
End;
{Процедура построения масштабной сетки}
Procedure DrawScale;
Var i, // Переменная первого цикла
j : Integer; // Переменная второго цикла
Begin
SetFillStyle(SolidFill, Black); // Установка черного цвета в палитру
Bar(30, 40, 630, 420); // Прорисовка прямоугольника
SetColor(LightGray); // Установка светлого серого цвета в палитру
Line(28, 421, 632, 421); // Прорисовка нижней окантовки
Line(28, 39, 632, 39); // Прорисовка верхней окантовки
SetColor(DarkGray); // Установка темного серого цвета линий масштабной сетки
{Горизонтальные линии}
For i:=0 to 12 Do
For j:=0 To 10 Do
Begin
If (j=0) Or (j=10) Then SetLineStyle(SolidLn, 0, NormWidth)
Else SetLineStyle(DottedLn, 0, NormWidth);
Line(30, 420-38*j, 630, 420-38*j);
End;
{Вертикальные линии}
For i:=0 to 12 Do
For j:=0 To 10 Do
Begin
If (i=0) Or (i=12) Then SetLineStyle(SolidLn, 0, NormWidth)
Else SetLineStyle(DottedLn, 0, NormWidth);
Line(30+50*i, 40, 30+50*i, 420);
End;
MoveTo(30+j, 420-Round(76*d)); // Перемещение графического курсора}
End;
{Процедура построения графика}
Procedure ConstructSchedule;
Var s: String; // Переменная для вывода на экран
Begin
CollectData; // Вызов процедуры определения напряжения
Delay(100); // Задержка 100 мс
j:=j+1; // Увеличение переменной цикла
If j=1 Then MoveTo(30+j, 420-Round(76*d)); // Перемещение графического курсора
SetColor(LightGreen); // Установка светлого зеленого цвета линии графика
LineTo(30+j, 420-Round(76*d)); // Прорисовка верхней линии графика
SetColor(Green); // Установка зеленого цвета линии графика
LineTo(30+j, 421-Round(76*d)); // Прорисовка нижней линии графика
If j=600 Then // Очистка экрана от линии графика
Begin
j:=0; // Обнуление переменной цикла
DrawScale; // Вызов процедуры вывода масштабной сетки
End;
RemoveFlicker; // Устранение мерцания
SetFillStyle(SolidFill, Black); // Установка черного цвета в палитру
Bar(36, 440, 105, 461); // Прорисовка прямоугольника
Str(d:1:2, s); // Перевод числа в строку
SetColor(LightGreen); // Установка светлого зеленого цвета линии графика
OutTextXY(36, 429, s+' V'); // Вывод текущего значения на экран
MoveTo(30+j, 420-Round(76*d)); // Перемещение графического курсора
End;
{Процедура вывода надписей}
Procedure WriteWords;
Begin
SetFillStyle(SolidFill, LightGray); // Установка светлого серого цвета в палитру
Bar(28, 38, 632, 422); // Прорисовка прямоугольника
Bar(28, 434, 152, 466); // Прорисовка прямоугольника
SetFillStyle(SolidFill, DarkGray); // Установка темного серого цвета в палитру
Bar(30, 436, 150, 464); // Прорисовка прямоугольника
SetFillStyle(SolidFill, Black); // Установка черного цвета в палитру
Bar(31, 437, 149, 463); // Прорисовка прямоугольника
{Вывод надписей на экран}
OutTextXY(1, 37, '5,0');
OutTextXY(1, 75, '4,5');
OutTextXY(1, 113, '4,0');
OutTextXY(1, 151, '3,5');
OutTextXY(1, 189, '3,0');
OutTextXY(1, 227, '2,5');
OutTextXY(1, 265, '2,0');
OutTextXY(1, 303, '1,5');
OutTextXY(1, 341, '1,0');
OutTextXY(1, 379, '0,5');
OutTextXY(1, 417, '0,0');
SetTextStyle(SansSerifFont, HorizDir, 0);
SetColor(DarkGray);
OutTextXY(291, 0, 'DIGITAL OSCILLOSCOPE');
SetColor(LightGray);
OutTextXY(290, 0, 'DIGITAL OSCILLOSCOPE');
SetTextStyle(DefaultFont, HorizDir, 0);
SetColor(White);
OutTextXY(536, 428, 'O. E.Danilov');
SetTextStyle(SansSerifFont, HorizDir, 0);
SetColor(DarkGray);
OutTextXY(383, 429, 'COM-VOLTMETER');
SetColor(LightGray);
OutTextXY(382, 429, 'COM-VOLTMETER');
End;
{Основная часть программы}
Begin
InitCOM; // Инициализация порта
CreateGraphics; // Инициализация графического режима
WriteWords; // Вывод надписей на экран
DrawScale; // Построение масштабной сетки
Repeat
ConstructSchedule; // Построение графика
Until KeyPressed; // Ожидание нажатия клавиши
CloseGraph; // Закрытие графического режима
End.
Инструкция к лабораторной работе № 59
Присвоение класса точности информационно-измерительной системы (ИИС)
Объект исследования. ИИС толщины металлической ленты в процессе ее изготовления на прокатном стане.
Средняя скорость движения ленты 60 м/мин, первичный измерительный преобразователь фирмы Vollmer.
Система за две секунды производит 100 наблюдений и размещает их в ПЗУ контроллера. Полученный массив данных контроллер подвергает математической обработке по ниже приведенному алгоритму. Предварительно оператор задает системе значение доверительной вероятности. Результат измерения в виде значения толщины и ее погрешности отображается на дисплее и передается по каналу обратной связи системе автоматического управления толщиной проката.
Цель работы. По результатам аттестации ИИС толщины ленты присвоить системе класс точности измерения.
Методика аттестации. Значение класса точности определяется наибольшей допустимой погрешностью. Структурная схема исследуемой системы имеет вид:
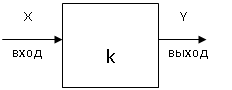 |
а ее математическое выражение описывается уравнением: ![]() ,
,
где: Y и Х – выходной и входной сигналы, k – коэффициент передачи.
Поочередно на систему подают входные сигналы Xj, равные 1,2,3…9, где j – номер поверяемой точки. При каждом неизменном входном сигнале система выполняет 100 наблюдений выходного сигнала Yji. Полученный массив наблюдений подвергают математической обработке статическими методами с целью определения погрешности. По результатам расчета присваивают класс точности ИИС.
Алгоритм вычислений.
Для каждого массива наблюдений выходного сигнала рассчитывают:
1. среднее арифметическое значение (результат измерения):
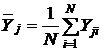 ,
,
где: N – количество наблюдений в j-ом массиве;
Yji – i-ое наблюдение j-го массива.
2. среднеквадратическую погрешность результата измерения:
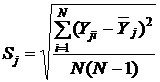 .
.
3. Задавшись доверительной вероятностью Рд=0,95 по таблице функции Лапласа, определяем соответствующее значение аргумента функции, равное Z(0,95)=1,89 и вычисляем случайную погрешность ![]() .
.
4. Рассчитываем неисключенную систематическую погрешность (НСП) по выходу системы измерения.
 ,
,
где kXj=Yjn - значение нормированной величины на выходе, если на вход подан сигнал Xj..
5. Определяем для каждой точки абсолютную погрешность измерения
и относительную погрешность измерения
 .
.
6. Выбираем из всех ![]() максимальное значение погрешности
максимальное значение погрешности ![]() . Выбираем из ряда 1,0; 1,5; 2,0; 2,5; 4,0; 5,0; 6,0 число ближайшее большее к
. Выбираем из ряда 1,0; 1,5; 2,0; 2,5; 4,0; 5,0; 6,0 число ближайшее большее к ![]() . Это значение и следует присвоить в виде класса точности исследуемой системы.
. Это значение и следует присвоить в виде класса точности исследуемой системы.
Практические указания для выполнения работы.
Предлагается на любом языке программирования и в любой операционной системе разработать программу, которая в итоге сможет присвоить класс точности исследуемой системе.
Исходными данными для расчетов являются входные сигналы Xj и выходные сигналы Yji, полученные в каждой поверяемой точке j.
Коэффициент передачи k следует принять равным 3,17. Задаться значением доверительной вероятности, принятой для технических общепромышленных измерений.
Программа должна выдавать значения ![]() , Sj,
, Sj, ![]() ,
, ![]() ,
, ![]() в каждой точке и соответствие с пунктом 6 присвоить класс точности ИИС.
в каждой точке и соответствие с пунктом 6 присвоить класс точности ИИС.
Для наглядности программа должна построить на одном графике следующие зависимости  ,
,  ,
, ![]() и
и  .
.
Программа должна содержать удобный пользовательский интерфейс (диалоговые окна).
Разработать в структурном виде алгоритм вычислений.
Содержание отчета.
Отчет должен содержать работающую программу в электронном виде и описание программы в бумажном виде.
Контрольные вопросы.
1. Какие виды погрешностей измерения Вы знаете?
2. Какие методы устранений погрешностей Вам известны?
3. Как определяется относительная и приведенная погрешность?
4. Как определяется класс точности прибора?
5. Какую погрешность обеспечивает прибор с классом точности 1,0?
6. Отличаются ли значения погрешностей в разных точках шкалы прибора и почему?
7. Влияет ли количество измерений в каждой точке (значений Yj) на значение погрешности и класс точности прибора?
8. Влияет ли количество эталонных точек, в которых производились измерения, на значение погрешности и класс точности прибора?
9. Какое значение доверительной вероятности рекомендовано выбрать для технических измерений и для измерений связанных со здоровьем людей, вопросами безопасности?
10. В каких случаях при статиcтической обработке данных следует использовать функцию Лапласа, а в каких случаях функцию Стьюдента?
Приложение В
Исходные данные для оценки класса точности прибора
Номер эталонной точки j = 1, X1 =1 , Y1n=3,17
Значения Y1i
Номер эталонной точки j = 2, X2 = 2, Y2n=6,34
Значения Y2i
Номер эталонной точки, j = 3, X3 =3, Y3n= 9.51
Значения Y3i
1
1
111
1
Номер эталонной точки, j = 4, X4 = 4, Y4n=12,68
Значения Y4н
1.9 1.9 1
1.1 1.9 1
1.1 1.5 1
1.9 1.6 1
1.7 1.7 1
1.4 1.0 1
1.0 1.8 1
1.5 1.5 1
1.3 1.6 1
1.2 1.1 1
Номер эталонной точки, j = 5, X5 =5, Y5n=15,85
Значения Y5i
1.2 1.1 1
1.8 1.4 1
1.1 1.3 1
1.0 1.8 1
1.7 1.9 1
1.1 1.8 1
1.7 1.2 1
1.3 1.3 1
1.9 1.0 1
1.0 1.1 1
Номер эталонной точки, j = 6, X6 = 6, Y6n=19,02
Значения Y6i
1.8 1.0 1
1.9 1.2 1
1.8 1.6 1
1.9 1.7 1
1.4 1.6 1
1.8 1.1 1
1.3 1.9 1
1.8 1.3 1
1.2 1.7 1
1.1 1.2 1
Номер эталонной точки, j = 7, X7 =7, Y7n=22,19
Значения Y7i
2.1 2.4 2
2.6 2.4 2
2.0 2.2 2
2.0 2.6 2
2.3 2.2 2
2.0 2.1 2
2.8 2.4 2
2.0 2.9 2
2.5 2.1 2
2.7 2.3 2
Номер эталонной точки, j = 8, X8 = 8, Y8n=25,36
Значения Y8i
2.4 2.0 2
2.7 2.3 2
2.3 2.3 2
2.9 2.9 2
2.6 2.6 2
2.5 2.7 2
2.3 2.7 2
2.5 2.9 2
2.0 2.7 2
2.8 2.1 2
Номер эталонной точки, j = 9, X9 = 9, Y9n=28,53
Значения Y9i
2.0 2.6 2
2.1 2.7 2
2.3 2.0 2
2.1 2.3 2
2.9 2.2 2
2.6 2.2 2
2.0 2.3 2
2.6 2.9 2
2.9 2.2 2
2.2 2.3 2
Литература
1. Как превратить персональный компьютер в измерительный комплекс: Пер. с франц.- М.: ДМК Пресс, 201с.
2. Метрология, стандартизация и технические средства измерений: Учебник для вузов /, . –М.: Высш. шк., 2002. – 205 с.: ил.
3. Метрология, стандартизация, сертификация и электроизмерительная техника: Учебное пособие / , , . - СПб.: Питер, 20с.: ил.
4. Описание лабораторных работ (151-157): , . – Орджоникидзе.: Подразделение оперативной полиграфии СКГМИ, 1984. – 88 с.
5. Стандартизация, метрология и подтверждение соответствия : учеб. для вузов / ; М-во образования Рос. Федерации. М.:Юрайт, 2010.-315 с.
6. Шишмарев измерений: Учебник для студентов. – М.: Издательский центр «Академия», 20с.
7. Электрические измерения: Учебник для вузов / , . - Л.: Энергия, 1990. – 390 с.: ил.

|
Из за большого объема этот материал размещен на нескольких страницах:
1 2 3 4 5 6 |
