
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
С. А. ДОГАНОВСКИЙ
Московский энергетический институт (технический университет)
ИНТЕГРИРОВАННАЯ СХЕМА ИНВЕРСНО-ПРЯМОГО НЕЙРОКОНТРОЛЛЕРА
Рассматриваются некоторые новые реалистичные тенденции построения интегрированной инверсно-прямой системы нейроуправления. Предлагается использование последовательности инверсных операторов в многокомпонентной структуре нейроконтроллера.
В настоящее время перспективной областью нейросетевых информационных технологий являются задачи нейроуправления сложными плохо формализуемыми нелинейными динамическими объектами в условиях разнообразных возмущающих воздействий внешней среды. В нейроуправлении решаются теже задачи, что и в классической теории управления, но постановка этих задач связана с синтезом и настройкой нейросетевых структур путем их предварительного (off line) или в режиме реального времени(on line) обучения с использованием информации об обобщенной ошибке.
Хотя имеются декларативные суждения о том, что адаптационные способности нейронных сетей позволяют применить их в качестве нейрорегуляторов в условиях, когда объект представляет собой «черный ящик» неизвестной или частично известной структуры, следует отметить не конструктивность такого подхода.
Настоящий доклад посвящен содержательной стороне подхода к проектированию традиционных регуляторов на основе известных аналитических методов теории автоматического регулирования (ТАР) [1-4] и конструктивной реализации структуры таких регуляторов-нейроконтроллеров - в нейросетевом базисе{5}. При таком подходе возможно использование дополняющих нейронную сеть экспертных систем для ее обучения в реальных условиях функционирования.
Отметим, что рассматриваемая в литературе типовая схема нейроуправления, построенная на основе метода динамической компенсации и инверсно - прямой модели обучения(Direct Inverse Control), когда нейронная сеть обучается как инверсная модель объекта управления и одновременно выполняет функции нейроконтроллера, носит упрощенный в сравнении с реальностью характер и не учитывает ряд деталей практики их применений. На современном этапе развития интеллектуальных технологий представляется актуальным применение искусственных нейронных сетей и для компенсации инструментальных погрешностей измерительной цепи сенсора уставки системы по доступным для контроля измерениям.
Рассматривается формирование решения для реалистичной схемы нейроуправления на основе инверсно-прямой модели обучения, когда нейронная сеть обучается как инверсная модель не только объекта управления, но и измерительной цепи сенсора уставки (интеллектуального датчика) и выполняет функции каскадной схемы нейроконтроллера.
Структурная схема
Структурный подход основан на выявлении причинно-следственной последовательности происходящих в системе процессов и позволяет выполнить декомпозицию общей сложной задачи управления на последовательность подзадач для оценки базовой минимальной структуры регулятора, при которой еще возможно решение задачи.
Структурная схема интегрированной системы нейроуправления с инверсно-прямой моделью нейроконтроллера(NC) приведена на рисунке.
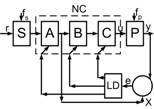
Для ее формального формирования необходимо:
- выделить базовый, редуцированный, трехкомпонентный набор локальных регуляторов A, B,C в виде каскадной последовательности их включения между выходом блока задатчика уставки сенсора S и управляющим входом объекта управления;
- реализовать стратегию управления в соответствии с основным принципом инверсно-прямого метода, когда для каждого из локальных схем регулятора определяются формальные инверсные, обратимые операторы такие, что выполняются условия по аппроксимации тождественного единице общего оператора системы нейроуправления;
- дополнительно компенсировать ошибки, возникающие при аппроксимации операторов регуляторов С и А за счет использования стабилизирующего закона управления и введения регулятора с оператором В.
На основе методов ТАР осуществляется нахождение операторов регуляторов А, В, С.
- оператор регулятора А определяется как инверсный по отношению к нелинейному оператору сенсора S в условиях действия помех fs, что связано с решением задачи градуировки или калибровки технических средств измерений (интеллектуальных датчиков) [1,2],
- оператор регулятора С определяется как инверсный по отношению к нелинейному оператора объекта в условиях действия возмущений fp [3.4];
- оператор регулятора В(двойного типа) определяется как инверсный к оператору РС, также к оператору SA исходя из условия достижения свойств астатизма в системе управления на основе метода масштабирования [2, c.351].
На основе нейросетевых методов [5] осуществляется конструктивная нейросетевая реализация структуры найденных операторов локальных операторов А, В, С инверсно-прямого нейроконтроллера. Здесь весовые коэффициенты соответствующей нейросети настраиваются блоком обучения LD исходя из условия минимизации задаваемого критерия от обобщенной ошибки обучения e=x-y по доступным для контроля измерениям (х).
При реализации описанной структуры нейроконтроллера весьма эффективным может оказаться использование комбинированной схемы нейроуправления, включающей наряду с нейроконтроллером экспертную систему. В результате, сначала осуществляется режим грубого управления, в результате которого нейронная сеть обучается от экспертной, а затем режим точного управления – собственно нейроуправления.
Обсуждаются возможности практических применений нейроконтроллера предложенной структуры, причем в предметной области нейросетевого базиса, аппроксимирующие свойства многомерных нейронных сетей А, В, С, обучаемых и используемых для группового управления, требуют дополнительного изучения.
Список литературы
1. Агамалов характеристик датчиков//Автоматизация производства и промышленная электороника. Т.2.- М.:Сов. Энциклопедия,1963.-с.168-169.
2. ,Попов систем автоматического регулирования.-М.:Наука,1966.
3. Догановский возмущений в нелинейных автоматических системах // Теория инвариантности в системах автоматического управления; Труды II Всесоюзн. совещ.- М.: Наука, 1964. с.468-484.
4. Зотов упавляющих устройств с компенсатором нелинейности// Проблемы нелинейного анализа в инженерных системах. Вып.1(9).-Казань:КГТУ им. , 1999, с. 37-43.
5. Narenda K/S/ Neural Networks for Control: Theory and Practice // Proc. of IEEE.-1996.-v.84.- № 10. p. .
