
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
1 вопрос.
Матрицы. Виды матриц. Операции над матрицами и их свойства.
Определитель матрицы n-го порядка. N, Z,Q, R,C,
Матрицей порядка m*n называется прямоугольная таблица из чисел, содержащая m-строк и n - столбцов.
Равенство матриц:
Две матрицы называются равными, если число строк и столбцов одной из них равно соответственно числу строк и столбцов другой и соответст. эл-ты этих матриц равны.
Замечание: Эл-ты имеющие одинаковые индексы являются соответствующими.
Виды матриц:
-Квадратная матрица: матрица называется квадратной, если число её строк равно числу столбцов.
-Прямоугольная: матрица называется прямоугольной, если число строк не равно числу столбцов.
-Матрица строка: матрица порядка 1*n (m=1) имеет вид a11,a12,a13 и называется матрицей строки.
-Матрица столбец:………….
-Диагональная: диагональ квадратной матрицы, идущая от верхнего левого угла к правому нижнему углу, то есть состоящая из элементов а11,а22……-называется главной диагональю. (опред: квадратная матрица все элементы которой равны нулю, кроме тех, что расположены на главной диагонали, называется диагональной матрицей.
-Единичная: диагональная матрица называется единичной, если все элементы расположены на главной диагонали и равны 1.
-Верхняя треугольная: А=||aij|| называется верхней треугольной матрицей, если aij=0. При условии i>j.
-Нижняя треугольная: aij=0. i<j.
-Нулевая: это матрица Эл-ты которой равны 0.
Операции над матрицами.
1.Транспонирование.
2.Умножение матрицы на число.
3.Сложение матриц.
4.Умножение матриц.
Основные св-ва действия над матрицами.
1.A+B=B+A (коммутативность)
2.A+(B+C)=(A+B)+C (ассоциативность)
3.a(A+B)=aA+aB (дистрибутивность)
4.(a+b)A=aA+bA (дистриб.)
5.(ab)A=a(bA)=b(aA) (асооц.)
6.AB≠BA (отсутствует комму.)
7.A(BC)=(AB)C (ассоц.) –выполняется, если опред. Произведений матриц выполняется.
8.A(B+C)=AB+AC (дистриб.)
(B+C)A=BA+CA (дистриб.)
9.a(AB)=(aA)B=(aB)A
10.![]()
11.AE=EA=A
2 вопрос.
Определитель квадратной матрицы – определение и его свойства. Разложение определителя по строкам и столбцам. Способы вычисления определителей.
Если матрица А имеет порядок m>1, то определитель этой матрицы – число.
Алгебраическим дополнением Aij эл-та aij матрицы А называется минор Mij, умноженный на число ![]()
ТЕОРЕМА1: Определитель матрицы А равен сумме произведений всех элементов произвольной строки (столбца) на их алгебраические дополнения.
Основные свойства определителей.
1. Определитель матрицы не изменится при её транспонировании.
2. При перестановки двух строк (столбцов) определитель меняет знак, а абсолютная величина его не меняется.
3. Определитель матрицы, имеющий две одинаковые строки (столбцы) равен 0.
4.При умножении строки (столбца) матрицы на число её определитель умножается на это число.
5. Если одна из строк (столбцов) матрицы состоит из 0, то определитель этой матрицы равен 0.
6. Если все элементы i-ой строки (столбца) матрицы представлены в виде суммы двух слагаемых, то её определитель можно представить в виде суммы определителей двух матриц.
7. Определитель не изменится, если к элементам одного столбца (строки) прибавить соответственно эл-ты другого столбца (строки) предварительно умнож. на одно и того же число.
8.Сумма произвольных элементов какого либо столбца (строки) определителя на соответствующее алгебраическое дополнение элементов другого столбца (строки) равна 0.
![]()
![]()
Способы вычисления определителя:
1. По определению или теореме 1.
2. Приведение к треугольному виду.
3 вопрос.
Определение и свойства обратной матрицы. Вычисление обратной матрицы. Матричные уравнения.
Определение: Квадратная матрица порядка n, называется обратной к матрице А того же порядка и обозначается ![]()
Для того чтобы для матрицы А существовала обратная матрица необходимо и достаточно, чтобы определитель матрицы А был отличен от 0.
Свойства обратной матрицы:
-1. Единственность: для данной матрицы А её обратная – единственная.
-2. определитель матрицы ![]()
-3. Операция взятия транспонирования и взятие матрицы обратной.
Матричные уравнения:
Пусть А и В две квадратные матрицы того же порядка.
-detA=0


4 вопрос.
Понятие линейной зависимости и независимости столбцов матрицы. Свойства линейной зависимости и линейной независимости системы столбцов.
- Столбцы А1,А2…Аn называются линейно зависимыми, если существует их не тривиальная линейная комбинация, равная 0-му столбцу.
- Столбцы А1,А2…Аn называются линейно независимыми, если существует их не тривиальная линейная комбинация, равная 0-му столбцу.
Линейная комбинация называется тривиальной, если все коэффициенты С(l) равны 0 и не тривиальной в противном случае.

Свойства:
1. Система столбцов, состоящая из нулевого столбца – линейна зависима.
![]()
2.для того чтобы столбцы ![]() были линейно зависимы необходимо и достаточно, чтобы какой-нибудь столбец являлся линейной комбинацией других столбцов.
были линейно зависимы необходимо и достаточно, чтобы какой-нибудь столбец являлся линейной комбинацией других столбцов.

Пусть 1 из столбцов ![]()
![]() является линейной комбинацией других столбцов.
является линейной комбинацией других столбцов.

3. Если несколько столбцов среди столбцов : ![]() линейно зависимы, то и все столбцы линейно зависимы.
линейно зависимы, то и все столбцы линейно зависимы.
4. Если система столбцов ![]() линейно независима, то любая её подсистема так же линейно независима.
линейно независима, то любая её подсистема так же линейно независима.
(Всё что сказано относительно столбцов, справедливо и для строк).
5 вопрос.
Миноры матрицы. Базисные миноры. Ранг матрицы. Метод окаймляющих миноров вычисления ранга матрицы.
Минором порядка к матрицы А называется определитель элементы которого расположены на пересечении к-строк и к-стролбцов матрицы А.
Если все миноры к-го порядка матрицы А =0, то любой минор порядка к+1 тоже равен 0.
Базисный минор.
Базисным минором матрицы А называется минор наибольшего к-го порядка отличного от 0.
Рангом матрицы А называется порядок её базисного минора.
Метод окаймляющих миноров: - Выбираем не нулевой элемент матрицы А ( Если такого элемента не существует, то ранг А =0)
Окаймляем минор предыдущий 1-го порядка минором 2-го порядка. (Если этот минор не равен 0, то ранг >=2) Если ранг этого минора =0, то окаймляем выбранный минор 1-го порядка другими минорами 2-го порядка. (Если все миноры 2-го порядка =0, то ранг матрицы = 1).
6вопрос.
Ранг матрицы. Способы нахождения ранга матрицы.
Рангом матрицы А называется порядок его базисного минора.[RgA]
Способы вычисления:
1) Метод окаймляющих миноров: -Выбираем ненулевой элемент матрицы А (если такого элемента нет, то ранг =0) – Окаймляем минор предыдущий 1-го порядка минором 2-го порядка. (Если этот минор ![]() , то r=RgA>=2). Если ранг этого минора = 0, то окаймляем выбранный минор 1-го порядка другим минором 2-го порядка. (Если все миноры второго порядка =0, то ранг =1). Повторяем эту процедуру до тех пор пока на этом шаге r Mr
, то r=RgA>=2). Если ранг этого минора = 0, то окаймляем выбранный минор 1-го порядка другим минором 2-го порядка. (Если все миноры второго порядка =0, то ранг =1). Повторяем эту процедуру до тех пор пока на этом шаге r Mr![]() r+1 Mr+1=0.
r+1 Mr+1=0.
2)Приведение матрицы к ступенчатому виду: этот метод основан на элементарных преобразованиях. При элементарных преобразованиях ранг матрицы не меняется.
Элементарными преобразованиями называются следующие преобразования:
-перестановка двух строк (столбцов).
-Умножение всех элементов некоторого столбца (строки) на число не =0.
- прибавление ко всем элементам некоторого столбцы (строки) элементов другого столбца (строки), предварительно умноженных на одно и тоже число.
7 вопрос.
Теорема о базисном миноре. Необходимое и достаточное условие равенства нулю определителя.
Базисным минором матрицы А называется минор наибольшего к-го порядка отличного от 0.
Теорема о базисном миноре:
Базисные строки (столбцы) линейно независимы. Любая строка (столбец) матрицы А являются линейной комбинацией базисных строк (столбцов).
Замечания: Строки и столбцы на пересечении которых стоит базисный минор называются соответственно базисными строками и столбцами.
![]() a11 a12… a1r a1j
a11 a12… a1r a1j
a21 a22….a2r a2j
a31 a32….a3r a3j
= 0
ar1 ar2 ….arr arj
ak1 ak2…..akr akj
Необходимые и достаточные условия равенства нулю определителя:
Для того чтобы определитель n-го порядка =0, необходимо и достаточно, чтобы его строки (столбцы) были линейно зависимы.
8 вопрос.
Системы линейных уравнений, их классификация и формы записи. Правило Крамера.
Решением системы алгебраических уравнений называется такая совокупность n чисел C1,C2,C3……Cn, которая при подстановки в исходную систему на место x1,x2,x3…..xn обращает все уравнения системы в тождества.
Система линейных алгебраических уравнений называется совместной, если она имеет хотя бы одно решение.
Совместная система называется определённой, если она имеет единственное решение, и неопределённой, если она имеет бесчисленно много решений.
Рассмотрим систему 3-х линейных уравнений с тремя неизвестными:

Определитель третьего порядка, соответствующий матрице системы, т. е. составленный из коэффициентов при неизвестных,

называется определителем системы.
Составим ещё три определителя следующим образом: заменим в определителе D последовательно 1, 2 и 3 столбцы столбцом свободных членов

Тогда можно доказать следующий результат.
Теорема (правило Крамера). Если определитель системы Δ ≠ 0, то рассматриваемая система имеет одно и только одно решение, причём

Доказательство. Итак, рассмотрим систему 3-х уравнений с тремя неизвестными. Умножим 1-ое уравнение системы на алгебраическое дополнение A11 элемента a11, 2-ое уравнение – на A21 и 3-е – на A31:

Сложим эти уравнения:

Рассмотрим каждую из скобок и правую часть этого уравнения. По теореме о разложении определителя по элементам 1-го столбца
 .
.
Далее рассмотрим коэффициенты при x2:

Аналогично можно показать, что и ![]() .
.
Наконец несложно заметить, что ![]()
Таким образом, получаем равенство: ![]() .
.
Следовательно, ![]() .
.
Аналогично выводятся равенства ![]() и
и ![]() , откуда и следует утверждение теоремы.
, откуда и следует утверждение теоремы.
9 вопрос.
Системы линейных уравнений. Условие совместимости линейных уравнений. Теорема Кронекера-Капелли.
Решением системы алгебраических уравнений называется такая совокупность n чисел C1,C2,C3……Cn, которая при подстановки в исходную систему на место x1,x2,x3…..xn обращает все уравнения системы в тождества.
Система линейных алгебраических уравнений называется совместной, если она имеет хотя бы одно решение.
Совместная система называется определённой, если она имеет единственное решение, и неопределённой, если она имеет бесчисленно много решений.
Условия совместности систем линейных алгебраических уравнений.
a11 a12 ……a1n x1 b1
a21 a22 ……a2n x2 b2
……………….. .. = ..
am1 am2…..amn xn bn
ТЕОРЕМА: Для того чтобы система m линейных уравнений с n неизвестными была совместной необходимо и достаточно, чтобы ранг расширенной матрицы был равен рангу матрицы А.
RgA’=RgA
Замечание: Эта теорема даёт лишь критерии существования решения, но не указывает способа отыскивания решения.
10 вопрос.
Системы линейных уравнений. Метод базисного минора - общий метод отыскивания всех решений систем линейных уравнений.

a11 a21…..a1n
A=a21 a22…..a2n
am1 am2…amn
Метод базисного минора:
Пусть система совместна и RgA=RgA’=r. Пусть базисный минор расписан в верхнем левом углу матрицы А.

![]()
![]() …..
…..![]() x
x d1
d1
![]()
![]() …..
…..![]() x
x![]() d2
d2
…………….. … =
![]()
![]() …..
…..![]() x
x dr
dr
d1 b1-a![]() -…..-a
-…..-a![]()
d2 b2-a(2r+1)x(r+1)-..-a(2n)x(n)
… = …………..
Dr br-a(rr+1)x(r+1)-..-a(rn)x(n)

detA![]()
Xi=![]()
Замечания: Если ранг основной матрицы и рассматриваемой равен r=n, то в этом случае dj=bj и система имеет единственное решение.
11вопрос.
Однородные системы линейных уравнений.
Система линейных алгебраических уравнений называется однородной, если все ее свободные члены равны нулю.
![]()
AX=0 – однородная система.
АХ =В – неоднородная система.
Однородные системы всегда совместны.
Х1 =х2 =..=хn =0
Теорема 1.
Однородные системы имеют неоднородные решения, когда ранг матрицы системы меньше числа неизвестных.
r<n
Теорема 2.
Однородная система n-линейных уравнений с n-неизвестными имеет не нулевое решение, когда определитель матрицы А равен нулю. (detA=0)
Свойства решений однородных систем.
Любая линейная комбинация решения однородной системы сама является решением этой системы.
α1C1 +α2C2 ; α1 и α2– некоторые числа.
А(α1C1 +α2C2) = А(α1C1) +А(α2C2) = α1(А C1) + α2(АC2) = 0,т. к. (А C1) = 0; (АC2) = 0
Для неоднородной системы это свойство не имеет места.
Фундаментальная система решений.
Теорема 3.
Если ранг матричной системы уравнения с n-неизвестными равен r, то эта система имеет n-r линейно-независимых решений.
Пусть базисный минор в левом верхнем углу. Если r< n, то неизвестные х r+1;хr+2;..хn называются свободными переменными, а систему уравнений АХ=В запишем, как Аr Хr =Вr
![]()
![]() =
=![]()
C1 = (C11 C21 .. Cr1 , 1,0..0)
C2 = (C21 C22 .. C2r,0, 1..0) <= Линейно-независимы.
……………………..
Cn-r = (Cn-r1 Cn-r2 .. Cn-rr ,0, 0..1)
Система n-r линейно-независимых решений однородной системы линейных уравнений с n-неизвестными ранга r называется фундаментальной системой решений.
Теорема 4.
Любое решение системы линейных уравнений есть линейная комбинация решения фундаментальной системы.
С = α1C1 +α2C2 +.. + αn-r Cn-r
Если r<n, то α – произвольные постоянные; если r=n – одно решение (нулевое).
12 вопрос.
Общее решение неоднородной системы.
Сон (общ. неоднор.) = Соо +Сч (частное)
АХ=В (неоднородная система) ; АХ= 0
(АСоо) +АСч = АСч = В, т. к. (АСоо) = 0
Сон= α1C1 +α2C2 +.. + αn-r Cn-r + Сч
Метод Гаусса.
Это метод последовательных исключений неизвестных (переменных) – заключается в том, что с помощью элементарных преобразований, исходная система уравнений приводится к равносильной системе ступенчатого вида, из которой последовательно, начиная с последних переменных, находят все остальные переменные.
Пусть а≠0 (если это не так, то перестановкой уравнений добиваются этого).
1)исключаем переменную х1 из второго, третьего…n-ого уравнения, умножая первое уравнение на подходящие числа и прибавляя полученные результаты ко 2-ому, 3-ему…n-ому уравнению, тогда получаем:
![]()
Получаем систему равносильную исходной.
2)исключаем переменную х2
3) исключаем переменную х3 и т. д.
Продолжая процесс последовательного исключения переменных х4;х5...хr-1 получим для (r-1)-ого шага.
r - ранг.
Число ноль последних n-r в уравнениях означают, что их левая часть имеет вид: 0х1 +0х2+..+0хn
Если хотя бы одно из чисел вr+1, вr+2… не равны нулю, то соответственное равенство противоречиво и система (1) не совместна. Таким образом, для всякой совместной системы эта вr+1 … вm равна нулю.
Последнее n-r уравнение в системе (1;r-1) являются тождествами и их можно не принимать во внимание.
Возможны два случая:
а)число уравнений системы (1;r-1) равно числу неизвестных, т. е. r=n (в этом случае система имеет треугольный вид).
б)r<n, в этом случае система (1;r-1) имеет ступенчатый вид.
Переход от системы (1) к равносильной ей системе (1;r-1) называется прямым ходом метода Гаусса.
О нахождение переменной из системы (1;r-1) – обратным ходом метода Гаусса.
Преобразования Гаусса удобно проводить, осуществляя их не с уравнениями, а с расширенной матрицей их коэффициентов.
13 вопрос.
Подобные матрицы.
Будем рассматривать только квадратные матрицы порядка n/
Матрица А называется подобной матрице В (А~В), если существует такая неособенная матрица S, что А=S-1BS.
Свойства подобных матриц.
1)Матрица А подобна сама себе. (А~А)
Если S=Е, тогда ЕАЕ=Е-1АЕ=А
2)Если А~В, то В~А
Если А=S-1ВS => SAS-1= (SS-1)B(SS-1)=B
3)Если А~В и одновременно В~С, то А~С
Дано, что А=S1-1BS1, и В=S2-1CS2 => A= (S1-1 S2-1) C(S2 S1) = (S2 S1)-1C(S2 S1) = S3-1CS3, где S3 = S2S1
4)Определители подобных матриц равны.
Дано, что А~В, надо доказать, что detA=detB.
A=S-1 BS, detA=det(S-1 BS)= detS-1* detB* detS = 1/detS *detB*detS (сокращаем) = detB.
5)Ранги подобных матриц совпадают.
Собственные векторы и собственные значения матриц.
Число λ называется собственным значением матрицы А, если существует ненулевой вектор Х(матр. столбец) такой, что АХ= λ Х, вектор Х называется собственным вектором матрицы А, а совокупность всех собственных значений называется спектром матрицы А.
Свойства собственных векторов.
1)При умножении собственного вектора на число получим собственный вектор с тем же собственным значением.
АХ= λ Х ; Х≠0
α Х => А(α Х) = α (АХ) = α(λ Х) = = λ (αХ)
2) Собственные векторы с попарно-различными собственными значениями линейно независимы λ1, λ2,.. λк.
λ1 –х1
λ2 – х2
……
Λк - хк
Пусть система состоит из 1-ого вектора, сделаем индуктивный шаг:
С1 Х1 +С2 Х2 + .. +Сn Хn = 0 (1) – умножаем на А.
С1 АХ1 +С2 АХ2 + .. +Сn АХn = 0
С1 λ1 Х1 +С2 λ2 Х2 + .. +Сn λn Хn = 0
Умножаем на λn+1 и вычтем
С1 Х1 +С2 Х2 + .. +Сn Хn+ Сn+1 Хn+1 = 0
С1 λ1 Х1 +С2 λ2 Х2 + .. +Сn λn Хn+ Сn+1 λn+1 Хn+1 = 0
C1 (λ1 –λn+1 )X1 + C2 (λ2 –λn+1 )X2 +.. + Cn (λn –λn+1 )Xn + Cn+1 (λn+1 –λn+1 )Xn+1 = 0
C1 (λ1 –λn+1 )X1 + C2 (λ2 –λn+1 )X2 +.. + Cn (λn –λn+1 )Xn = 0
Надо чтобы С1 =С2 =… = Сn = 0
Сn+1 Хn+1 λn+1 =0
Характеристическое уравнение.
А-λЕ называется характеристической матрицей для матрицы А.
Теорема.
Для того, чтобы ненулевой вектор Х был собственным вектором матрицы А, соответствующий собственному значению λ необходимо чтобы он являлся решением однородной системы линейно-алгебраических уравнений (А - λЕ)Х = 0
Нетривиальное решение система имеет тогда, когда det (А - XЕ) = 0 - это характеристическое уравнение.
Утверждение!
Характеристические уравнения подобных матриц совпадают.
det(S-1AS – λЕ) = det(S-1AS – λ S-1ЕS) =det(S-1 (A – λЕ)S) = det S-1 det(A – λЕ) detS= det(A – λЕ)
Характеристический многочлен.
det(A – λЕ)- функция относительно параметра λ
det(A – λЕ) = (-1)n Xn +(-1)n-1(a11+a22+..+ann)λn-1+..+detA
Этот многочлен и называется характеристическим многочленом матрицы А.
Следствие:
1)Если матрицы А~В, то сумма их диагональных элементов совпадает.
a11+a22+..+ann = в11+в22+..+вnn
2)Множество собственных значений подобных матриц совпадают.
А~В
λi i=1,2..n
Если характеристические уравнения матриц совпадают, то они необязательно подобны.
![]()
Для матрицы А
![]()
Для матрицы В

(1-λ)2= 0
14 вопрос.
Приведение матрицы к диагональному виду.
Говорят, что А диагонализируема, если существует подобная ей диагональная матрица.
Утверждение!
Если матрица А приводится к диагональному виду, то на главной диагонали матрицы расположено собственное значение матрицы А.
А =>![]()
Det(Ag-λE) = (λ11 – λ)( λ22 – λ)…( λnn – λ)= 0
Теорема.
Для того чтобы матрица А порядка n была диагонализируема, необходимо, чтобы существовали линейно-независимые собственные вектора матрицы А.
Следствие.
Если все собственные значения матрица А различны, то она диагонализируема.
Алгоритм нахождения собственных векторов и собственных значений.
1)составляем характеристическое уравнение
Det(A-λE) = 0
2)находим корни уравнений
λ1, λ2,.. λn
3)составляем систему уравнений для определения собственного вектора.
λi (A-λi E)X = 0
4)находим фундаментальную систему решений
x1,x2..xn-r, где r - ранг характеристической матрицы.
r =Rg(A - λi E)
5)собственный вектор, собственные значения λi записываются в виде:
X = С1 Х1 +С2 Х2 + .. +Сn-r Хn-r, где С12 +С22 +… С2n ≠0
6)проверяем, может ли матрица быть приведена к диагональному виду.
7)находим Ag
Ag = S-1AS S= [x1, x2,…xn]
15 вопрос.
Базис прямой, плоскости, пространства.
Максимальное число линейно-независимых векторов называются базисом.
Базисом на прямой является любой ненулевой вектор.
Базисом на плоскости являются любые два некаллениарных вектора.
Базисом в пространстве является система любых трех некомпланарных векторов.
Коэффициент разложения вектора по некоторому базису называется компонентами или координатами вектора в данном базисе.
![]()
![]()
а1 , а2 , а3 – координаты.
16 вопрос.
Векторы.
1.Скаляром называется всякое действительное число.
Вектором называется направленный прямолинейный отрезок.
В векторной алгебре приходится рассматривать также и нулевой вектор. Нулевым вектором является точка (ō)
Направление нулевого вектора считается неопределенным.
2.Равенство векторов.
В векторной алгебре два вектора называются равными, если они имеют одинаковые длины и одинаковые направления.
Два вектора считаются одинаково-направленными, если они расположены на одной прямой, или на параллельных прямых и направлены в одну сторону.
При параллельном переносе длина и направление векторов не изменяется, то есть точка, приложения вектора, это любая точка пространства.
Такие векторы называются свободными.
3.Модуль вектора.
Модулем вектора называется его длина, то есть расстояние между А и В (│![]() │, │
│, │![]() │). Модуль вектора равен нулю, тогда, когда этот вектор нулевой (│ō│=0)
│). Модуль вектора равен нулю, тогда, когда этот вектор нулевой (│ō│=0)
4.Орт вектора.
Ортом данного вектора называется вектор, который направлен одинаково с данным вектором и имеет модуль, равный единице.
Равные вектора имеют равные орты.
5.Угол между двумя векторами.
Это меньшая часть площади, ограниченная двумя лучами, исходящими из одной точки и направленные одинаково с данными векторами.
![]()
Сложение векторов. Умножение вектора на число.
1)Сложение двух векторов
![]()
Суммой двух векторов является с(вектор), соединяющий начало а(вектор) с концом в(вектор), при условии, что начало второго совмещено с концом первого.
Рисунок* │ ![]() +
+ ![]() │≤│
│≤│ ![]() │+│
│+│![]() │
│
2)Умножение вектора на скаляр.
Произведением вектора и скаляра называют новый вектор, который имеет:
а) = произведения модуля умножаемого вектора на абсолютную величину скаляра.
б) направление одинаковое с умножаемым вектором, если скаляр положителен, и противоположное, если скаляр отрицателен.
λ а(вектор)=>│ λ ![]() │= │
│= │![]() λ │=│ λ ││
λ │=│ λ ││![]() │
│
λō=ō ;0![]() =0
=0
Свойства линейных операций над векторами.
1.Закон коммунитативности.
![]() +
+![]() =
=![]() +
+![]() 2. Закон ассоциативности.
2. Закон ассоциативности.
![]() +(
+(![]() +
+![]() ) = (
) = (![]() +
+![]() ) +
) + ![]() )
)
3. Сложение с нулем.
а(вектор)+ō= а(вектор)
4.Сложение с противоположным.
![]() +(-1)
+(-1) ![]() =ō
=ō
5. (αβ)![]() = α(β
= α(β![]() ) = β(α
) = β(α![]() )
)
6;7.Закон дистрибутивности.
α(![]() +
+ ![]() )=α
)=α![]() +α
+α![]()
(α+β)![]() = α
= α![]() +β
+β![]()
8. 1![]() =
= ![]()
Выражение вектора через его модуль и орт.
![]() – орт
– орт
![]() = │
= │![]() │
│ ![]()
Максимальное число линейно-независимых векторов называются базисом.
Базисом на прямой является любой ненулевой вектор.
Базисом на плоскости являются любые два некаллениарных вектора.
Базисом в пространстве является система любых трех некомпланарных векторов.
Коэффициент разложения вектора по некоторому базису называется компонентами или координатами вектора в данном базисе.
![]()
![]()
а1 , а2 , а3 – координаты.
17 вопрос.
Линейная зависимость и независимость между векторами.
Если над ,
, …
… выполнить действие сложения и умножения на скаляр, то в результате любого числа таких действий получим:
выполнить действие сложения и умножения на скаляр, то в результате любого числа таких действий получим:
λ1  + λ2
+ λ2  +..+ λк Это линейная комбинация исходных векторов.
+..+ λк Это линейная комбинация исходных векторов.
Вектора , … называются линейно-зависимыми, если существует их нетривиальная линейная комбинация, равная ō.
λ1 + λ2 +..+ λк = 0
Вектора, … называются линейно-НЕзависимыми, если не существует их нетривиальная линейная комбинация.
Свойства линейно-зависимых и Независимых векторов:
1)система векторов, содержащая нулевой вектор линейно-зависима.
λ1 + λ2 +..+ λк +1ō= ō
2)для того, чтобы векторы , … были линейно-зависимыми, необходимо, чтобы какой-нибудь вектор являлся линейной комбинацией других векторов.
3)если часть векторов из системы а1(вектор), а2(вектор)… ак(вектор) линейно-зависимы, то и все вектора линейно-зависимы.
4)если все вектора , … линейно-Независимы, то любая подсистема этих векторов также линейно-НЕзависима.
Аффинная система координат
Фиксированная тройка некомпланарных векторов с общим началом в т. О называется аффинной системой координат, а т. О – началом этой системы координат.
![]()
 r1 , r2 , r3 – опр. вектор.
r1 , r2 , r3 – опр. вектор.
М( ,
, ,
, )
)
Линейные операции в координатах.
![]()
 +
+  = (а1 + в1 )
= (а1 + в1 )  + (а2 + в2 )
+ (а2 + в2 )  + (а3 + в3 )
+ (а3 + в3 )
λ = (λа1 ) + (λа2 ) + (λа3 )
Метод системы координат
Теорема об однозначном разложении любого вектора по трем некомпланарным векторам, а также точки пространства определены тройками чисел(координат), благодаря этому становится возможным в векторной алгебре применять скалярные аналитические методы, заменяя вектор на тройку чисел.
Прямоугольная система координат.
Это аффинная система координат с ортонормированным базисом.
Базис ортонормирован, если:
1)вектора базиса попарно перпендикулярны.
2) их модули равны единице.
Два базиса: правый и левый.
Каллениарные вектора.
Векторы называются каллениарными, если они параллельны одной прямой.
Нулевой вектор считается каллениарным любому вектору.
Компланарные вектора.
Вектора называются компланарными, если они параллельны одной плоскости.
1)нулевой вектор считается компланарным в любой системе компланарных между собой векторов.
2) компланарные вектора расположены в одной плоскости, если их начало поместить в одну точку.
3) два вектора всегда компланарны.
18 вопрос.
Скалярное произведение векторов. Его свойства и выражение в координатах. Геометрические приложения.
Скалярное произведение 2-х векторов – это число равное произведению векторов на косинус угла между ними.

Свойства скалярного произведения:
1. Комутативность ![]()
2. ![]()
3. (a;b)=0, тогда и только тогда, когда векторы ортоганальны или какой нибудь из векторов равен 0.
4. Дистрибутивность (αa+βb;c)=α(a;c)+β(b;c)
5. Выражение скалярного произведения a и b через их координаты
![]()
![]()
![]()

При выполнении условия (![]() ) , h, l=1,2,3
) , h, l=1,2,3



19 вопрос.
Векторное произведение векторов, его свойство и выражение в координатах. Геометрические приложения.
Векторным произведением 2-х векторов ![]() и
и ![]() называется третий вектор
называется третий вектор ![]() который удовлетворяет следующим уравнениям:
который удовлетворяет следующим уравнениям:
1. ![]()
2. ![]()
3. ![]() – правая
– правая
Свойства векторного произведения:
1. ![]()
2. ![]()
3. ![]()
4. Векторное произведение координатных ортов
![]() -ортонормированый базис.
-ортонормированый базис.
![]() ;
; ![]() =1
=1

![]()
![]()
![]()
Часто для обозначения ортов ортонормированного базиса используются 3 символа ![]()

Векторное произведение в координатной форме.



Если ![]() - это ортонормированный базис, то
- это ортонормированный базис, то ![]()

20 вопрос.
Смешанное произведение векторов, его свойства и выражение в координатах. Геометрические приложения.
Векторно-скалярное произведение 3-х векторов.
Это произведение, которое получается скалярным умножением векторного произведения 2-х векторов на 3-й вектор.
Смешаное произведение 3-х векторов образующих правую систему координат равно объёму паралепипеда построенного на этих векторах.
23 вопрос.
Прямая линия на плоскости. Взаимное расположение 2-х прямых. Расстояние от точки до прямой линии. Угол между двумя прямыми. Условие параллельности и перпендикулярности 2-х прямых.
1. Часный случай расположения 2-х прямых на плоскости.
1)![]() - уравнение прямой параллельной оси ОХ
- уравнение прямой параллельной оси ОХ
2)![]() - уравнение прямой параллельной оси ОУ
- уравнение прямой параллельной оси ОУ
3)
2. Взамное расположение 2-х прямых.
Теорема 1 Пусть относительно аффинной системы координат даны уравнения прямых
![]()
![]()
![]()
![]()
А) Тогда необходимое и достаточное условие когда они пересекаются имеет вид:
![]()
Б) Тогда необходимое и достаточное условие того что прямые паралельны является условие:
![]() ,
,![]()
B) Тогда необходимым и достаточным условием того что прямые сливаются в одну является условие :
![]()
3. Расстояние от точки до прямой.
Теорема. Расстояние от точки ![]() до прямой
до прямой ![]() относительно декартовой системы координат :
относительно декартовой системы координат : ![]()

![]()
![]()
![]()
4. Угол между двумя прямыми. Условие перпендикулярности.
Пусть 2 прямые заданы относительно декартовой системы координат общими уравнениями.



![]()
Если ![]() , то прямые перпендикулярны.
, то прямые перпендикулярны.
24 вопрос.
Плоскость в пространстве. Условие комплонарности вектора и плоскости. Расстояние от точки до плоскости. Условие параллельности и перпендикулярности двух плоскостей.
1. Условие комплонарности вектора и плоскости.

![]()

![]()
![]()



2. Расстояние от точки до плоскости в декартовой системе координат.

![]()
![]()
![]()

3. Угол между 2-я плоскостями. Условие перпендикулярности.



![]()
Если ![]() , то плоскости перпендикулярны.
, то плоскости перпендикулярны.
25 вопрос.
Прямая линя в пространстве. Различные виды уравнения прямой линии в пространстве.
1. Прямая линия – как линия пересечения 2-х плоскостей.
![]() – L
– L

![]()
2. Векторное уравнение прямой в пространстве.

![]()
![]()
3. Параметрическое уравнение прямой.
![]()
![]()

![]()
4. Каноническое уравнение прямое.

![]()
![]()
5. Уравнение прямой проходящей через 2 заданные точки.

![]()
![]()

![]()

Вопрос 26.
Пряма в пространстве. Приведение общего уравнения прямой линии к каноническому. Угол между двумя прямыми. Усл параллельности и перпендикулярности. Кратчайшее расстояние между двумя прямыми.
Приведение общего вида к каноническому.
Общие уравнения прямой в координатной форме:
![]()


Чтобы преобразовать общее уравнение в каноническое нужно найти произвольную точку прямой и числа (l, m,n)
При этом направляющий вектор прямой может быть найден как векторное произведение векторов нормали к заданным плоскостям.
a[n1*n2]= ![]() = il+jm+kn
= il+jm+kn
Угол между двумя прямыми. Усл параллельности и перпендикулярности
Возьмем в канонической форму две прямые
(x-x1)/l1+ (y-y1)/m1+ (z-z1)/n1
(x-x2)/l2+ (y-y2)/m2+ (z-z2)/n2
![]()


Усл параллельности ![]()
Усл перпендикулярности ![]()
Кратчайшее расстояние между двумя прямыми.
[a1,a2]
Кратчайшее расстояние d=|np[a1,a2]M1M2]|=|(a1,a2,M1M2)|/|[a1,a2]|
27 вопрос.
Линии Второго Порядка. Канонические уравнения линий второго порядка
Рассм. Общий вид алгебраического Ур-я второго порядка
Ax2+2Bxy+Cy2+2Dx+2Ey+F=0
Вид кривой | Каноническое уравнение | Инварианты |
Невырожденные кривые ( | ||
Эллипс |
|
|
Гипербола |
|
|
Парабола |
|
|
Вырожденные кривые (Δ = 0) | ||
Точка |
|
|
Две пересекающиеся прямые |
|
|
Две параллельные прямые |
|
|
Одна прямая |
|
|
28 вопрос.
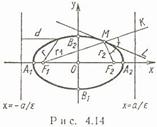
Эллипс. Вывод Канонического уравнения эллипса. Форма. Свойства
Эллипс – геометрическое место точек, для которых сумма расстояний от двух фиксированных расстояний, называемых фокусами есть данное число 2a, большее чем расстояние 2c между фокусами.

 рис2
рис2
Вывод уравнения эллипса.
Для вывода уравнения эллипса выберем систему координат Оху так, чтобы фокусы ![]() и
и ![]() лежали на оси Ох, а начало координат совпадало с серединой отрезка
лежали на оси Ох, а начало координат совпадало с серединой отрезка ![]() . Тогда фокусы будут иметь следующие координаты:
. Тогда фокусы будут иметь следующие координаты:
![]() и
и ![]() .
.
Пусть M(x, y) – произвольная точка. Тогда MF1+MF2=2a, т. е.
![]()
![]()
![]()
![]()
![]()
![]()
Так как a > с, то ![]() . Положим
. Положим
![]()
Тогда последнее уравнение примет вид ![]() или
или
![]()
Исследование формы эллипса и св-ва
y2/b2=1-x2/a2 =>±b/a умножить на корень из(a2-x2)
Рассм случай когда x>=0 y>=0
X=a y=0
X=0 y=b
x>a a2-x2 <0
отрезок 2a большая полуось эллипса
отрезок 2b малая полуось эллипса.
Точки пересечения эллипса с осями называют его вершинами
Эксентриситет – отношение расстояния между фокусами к длине большой оси.
e=c/a= ![]() 0=<e<1
0=<e<1
на рис.2 r1=a+ex r2=a-ex
Ур-е касательной к эллипсу
 Ур-е касательной в точке М
Ур-е касательной в точке М
d-директриса = a/e-x
e=r/d – основное св-во директрис
Вопрос 29. Гипербола и парабола: каноническое уравнение форма и свойства.
Гипербола - геометрическое место для котороых разность расстояний между двумя фиксированными точками, называемых фокусами есть величина постоянная
MF1-MF2=±2a
вывод канонического уравнения будет происходить аналогично эллипсу
![]() - каноническое уравнение гиперболы
- каноническое уравнение гиперболы

Форма и св-ва
y=±b/a умножить на корень из (x2-a2)
Ось симметрии гиперболы - её оси
Отрезок 2a - действительная ось гиперболы
Эксентриситет e=2c/2a=c/a
Если b=a получается равнобокая гипербола
Ассимтотой - называется прямая, если при неограниченном удалении точки M1 по кривой расстояние от точки до прямой стремится к нулю.
lim d=0 при x-> ∞
d=ba2/(x1+(x21-a2)1/2/c)
касательная гиперболы
xx0/a2 - yy0/b2 = 1
парабола - геометрическое место точек, равноудаленное от точки, названной фокусом и данной прямой, названной директриссой

P-F(P/2; 0)
d=FM
M(x, y)
![]() - каноническое уравнение параболы
- каноническое уравнение параболы
свойства
ось симметрии параболы проходит через её фокус и перпендиукулярна директрисе
если вращать параболу получится эллиптический параболоид
все параболы подобны
вопрос 30. Исследование уравнения общего вида кривой второго порядка.
Тип кривой опр. при старших членах A1, B1, C1
A1x12+2Bx1y1+C1y12+2D1x1+2E1y1+F1=0
1. AC=0 ->кривая параболического типа
A=C=0 => 2Dx+2Ey+F=0
A≠0 C=0 => Ax2+2Dx+2Ey+F=0
Если Е=0 => Ax2+2Dx+F=0
то x1=x2 - сливается в одну
x1≠x2 - прямые параллельны Оу
x1≠x2 и корни мнимые, не имеет геометричекого образа
С≠0 А=0 =>C1y12+2D1x1+2E1y1+F1=0
Вывод: кривая параболического типа это либо парабола, либо 2 параллельные прямые, или мнимые, или в одну сливаются.
2.AC>0 -> кривая эллиптического типа
Дополняя до полного квадрата исходное уравнение преобразуем к каноническому, тогда получим случаи
(x-x0)2/a2+(y-y0)2/b2=1 - эллипс
(x-x0)2/a2+(y-y0)2/b2=-1 - мнимый эллипс
(x-x0)2/a2-(y-y0)2/b2=0 - точка с координатой x0 y0
Вывод: кривая эл. типа ето либо эллипс, либо мнимый, либо точка
3. АС<0 - кривая гиперболического типа
(x-x0)2/a2-(y-y0)2/b2=1 гипербола, действительная ось параллельна Ох
(x-x0)2/a2-(y-y0)2/b2=-1 гипербола, действительная ось параллельна Oy
(x-x0)2/a2-(y-y0)2/b2=0 ур-е двух прямых
Вывод: кривая гиперболического типа это либо гипербола, либо две прямые
