
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
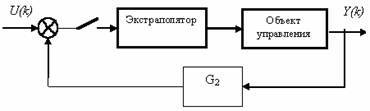 На рисунке приведена структурная схема многомерной цифровой системы с
На рисунке приведена структурная схема многомерной цифровой системы с
обратной связью по выходу
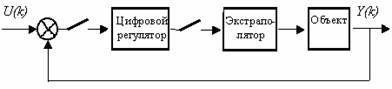 На рисунке приведена структурная схема многомерной цифровой системы с
На рисунке приведена структурная схема многомерной цифровой системы с
последовательно включенным цифровым регулятором
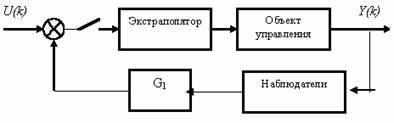 На рисунке приведена структурная схема многомерной цифровой системы с
На рисунке приведена структурная схема многомерной цифровой системы с
обратной связью по состоянию и наблюдателем
Автопилот самолета построен по принципу
замкнутого управления по отклонению
Адаптивные системы, у которых адекватным образом изменяются алгоритмы управления, называются
самообучающимися
Адаптивные системы, у которых адекватным образом изменяются только параметры системы, называются
самонастраивающимися
Алгоритмом управления называется совокупность правил, по которым
вырабатываются управляющие сигналы
Амплитудная частотная характеристика обратно пропорциональна значению частоты во всем диапазоне частот у типового звена
интегрирующего
Амплитудная частотная характеристика системы автоматического управления равна
модулю частотной передаточной функции
Асимптотическая логарифмическая амплитудная частотная характеристика имеет наклон плюс 40 дБ/дек у типового звена
дифференцирующего второго порядка
В 1 килобайте
1024 байт
В дискретной системе поведение оригинала на бесконечности (при t®¥) определяется поведением Z-изображения функции (1–z–1)F(z) при z стремящемся к
1
В дискретной стационарной системе, описываемой разностными уравнениями в пространстве состояний, коэффициенты матрицы системы и матрицы управления зависят от
такта квантования
В дискретных системах автоматического управления управляющая ЭВМ
является одним из главных элементов системы, реализующих закон управления
В дискретных системах период квантования должен быть меньше времени нарастания переходного процесса в
2–3 раза
В качестве идентификатора используются
указательные атрибуты
В линейной системе автоматического управления вынужденная составляющая выходного сигнала зависит от
входного воздействия
В линейной системе автоматического управления свободная составляющая выходного сигнала зависит от
параметров системы
В линейной системе автоматического управления устойчивость или характер выходного сигнала определяет следующая составляющая выходного сигнала
только свободная
В непрерывной линейной стационарной динамической системе отношение преобразования Лапласа переменной на выходе системы к преобразованию Лапласа воздействия на ее входе при нулевых начальных условиях представляет собой
передаточную функцию
В области корней граница устойчивости дискретной системы представляет собой окружность с радиусом, равным
1
В области корней граница устойчивости линейной непрерывной системы – мнимая ось при помощи соотношения ![]() преобразуется в границу устойчивости линейной цифровой системы, представляющую
преобразуется в границу устойчивости линейной цифровой системы, представляющую
единичный круг
В основе традиционных методов синтеза цифровых систем управления лежит идея о
жестко заданной структуре системы
В программно-управляемых устройствах цифровых систем автоматического управления широкое распространение получили
микропроцессоры
В процессе копирования количество информации
не меняется
В процессе преобразования количество информации
уменьшается или не изменяется
В разомкнутых системах отсутствует
обратная связь
В теории автоматического управления предметом исследования системы является ее
математическая модель
В теории автоматического управления с возможностью определения переменных состояния по результатам измерения выходных переменных системы связано понятие
наблюдаемости
В теории автоматического управления с возможностью приведения системы в заданное состояние с помощью входных или управляющих воздействий связано понятие
управляемости
В цифровых системах автоматического управления используется квантование
по уровню и по времени
В цифровых системах автоматического управления наибольшее распространение получила модуляция
амплитудно-импульсная
В цифровых системах относительный шаг квантования по уровню при длине слова, равной n бит, определяется выражением
![]()
В цифровых системах управления выбор интервала дискретизации по времени практически определяется
длиной слова ЭВМ
В цифровых системах управления функцией периферии ЭВМ является
сбор исходных данных и их обработка
В цифровых системах управления функцией центральных устройств ЭВМ является
реализация управляющих алгоритмов
В цифровых системах устройство, определяющее значение амплитуды входного сигнала на интервал вперед, называется
экстраполятором
Внешнее воздействие, определяющее необходимый закон изменения выходной величины или управляемой координаты объекта управления, называется
задающим
Во избежание ошибок, связанных с квантованием по уровню, в цифровых системах управления разрядность процессора ЭВМ относительно разрядности слов АЦП и ЦАП должна быть
значительно больше
Воздействием, приводящим к изменению состояния системы, называется
любой фактор
Время ответа управляющей ЭВМ ТЭВМ должно быть связано с частотой среза fср соотношением

Все коэффициенты передаточной функции системы автоматического управления представляют собой числа
вещественные
Выбор величины периода квантования должен проводиться на основании выполнения требования адекватности информативности непрерывной и цифровой частей автоматической системы, которые обеспечиваются, если частота квантования больше значения частоты среза системы в
6–8 раз
Выбор закона управления и значения коэффициентов цифровой системы управления, если известны характеристики объекта управления и заданы требования к системе, является задачей
синтеза
Выбор значений параметров системы автоматического управления в соответствии с каким-либо критерием является задачей синтеза
параметрического
Выбор правильного периода квантования дискретной системы не зависит от
потребляемой мощности
Вынужденные установившиеся колебания на выходе системы автоматического управления или динамического звена, вызванные типовым гармоническим воздействием на входе, описывает
частотная характеристика
Выражение ![]() представляет собой передаточную функцию
представляет собой передаточную функцию
экстраполятора нулевого порядка
Выражение ![]() является Z-преобразованием функции
является Z-преобразованием функции
f(t) = 1
Дедуктивный подход к созданию структуры управления целесообразен в случае
создания новых организаций на базе существующих
Дерево целей есть совокупность целей
иерархическая
Динамическое звено с передаточной функцией ![]() является
является
минимально-фазовым
Дискретная система переходит в непрерывную при периоде квантования Т0
стремящимся к нулю
Дисперсионный коэффициент конкордации служит
мерой согласованности мнений экспертов
Для автоматизации бухгалтерского учета на предприятии нужно внедрить
АСУП
Для дискретной функции fT(t) выражение ![]() получило название
получило название
дискретного преобразования Лапласа
Для получения спектральной плотности стационарной случайной функции на выходе системы необходимо спектральную плотность входного сигнала умножить на
квадрат модуля комплексной передаточной функции
Для построения областей устойчивости применяется метод
D-разбиения
Для устойчивости линейной системы автоматического управления необходимо и достаточно, чтобы все корни характеристического уравнения имели
отрицательные действительные части
Для устойчивости линейной системы автоматического управления необходимо, чтобы все коэффициенты характеристического уравнения были
положительными
Для устойчивости линейной системы автоматического управления необходимо и достаточно, чтобы при положительных коэффициентах характеристического полинома определитель Гурвица и все его диагональные миноры были
положительны
Для устойчивости линейной системы автоматического управления с характеристическим полиномом порядка n необходимо и достаточно, чтобы годограф Михайлова, при изменении частоты от 0 до ¥, начав свое движение с вещественной положительной полуоси, прошел бы последовательно в положительном направлении (против часовой стрелки), нигде не обращаясь в нуль, количество квадрантов, равное
n
Для устойчивых систем годограф Михайлова в последнем квадранте уходит
в бесконечность
Долгосрочные цели охватывают период
более 3 лет
Достоинством систем автоматического управления по отклонению является
высокая точность в работе
Если длительность импульса сохраняется экстраполятором до момента поступления следующего импульса, он называется экстраполятором порядка
нулевого
Если известно описание дискретных процессов в пространстве состояний, то, применив Z-преобразование, можно получить
импульсную передаточную функцию системы
Если известны модели непрерывного типа, описывающие поведение объектов с сосредоточенными параметрами, то при малых тактах квантования разностные уравнения можно получить из дифференциальных путем их
дискретизации
Если решетчатая функция определена только для положительных значений аргумента, т. е. f(k) = 0 при k < 0, то в точке k = 0 левая n-разностьÑ nf(0) для любого целого положительного n равна
f(0)
Если система обладает способностью уменьшать априорную неопределенность и повышать эффективность управления, используя информацию, получаемую в процессе нормальной эксплуатации, она называется
адаптивной
Если характеризовать процессор управляющей ЭВМ только функцией передачи информации, то его описание можно выполнить с помощью
цифрового фильтра и элемента запаздывания
Зависимость выходной величины от входной после завершения всех переходных процессов в динамическом звене называется
статической характеристикой
Зависимость, представляющая собой преобразование входного воздействия в реакцию динамического звена в соответствии с особенностями, определяемыми внутренними свойствами звена, характеризует его
передаточные свойства
Задача, заключающаяся в определении свойств системы автоматического управления для заданной структуры с конкретными элементами с заранее известными параметрами, называется
анализом
Задача, при решении которой на основе информации об объекте управления, задавая свойства системы автоматического управления, определяют конкретные требования к ней, а затем отыскивают условия, при которых будут выполняться эти требования, называется
синтезом
Задачей регулирования является
поддержание заданных значений управляемых величин
Замкнутая линейная система автоматического управления будет устойчивой, если логарифмическая амплитудная характеристика ее разомкнутого контура пересечет ось частот раньше, чем логарифмическая фазовая характеристика достигнет значения
минус p
Звенья, у которых все нули и полюсы передаточной функции имеют отрицательные или равные нулю вещественные части, называются
минимально-фазовыми
Идентификатор – это
множество атрибутов экземпляра
Иерархия есть структура
многоуровневая по подчиненности
Из всех категорий технических требований к системам автоматического управления наиболее существенным является требование
устойчивости работы
Из перечисленного: 1) анализ информации; 2) выполнение программы; 3) принятие решения; 4) оптимизация – в системах управления решаются задачи
2, 4
Из перечисленного: 1) аналоговые; 2) аналитические; 3) имитационные – к математическим моделям относятся (ится)
2, 3
Из перечисленного: 1) банк данных; 2) подсистема планирования; 3) подсистема слежения; 4) подсистема управления – интегрированная система управления включает
1, 2, 3
Из перечисленного: 1) вербальные; 2) аналоговые; 3) математические; 4) физические – к реальным моделям относятся
2, 4
Из перечисленного: 1) внутренняя интерпретируемость; 2) семантическая метрика; 3) дискретность информации; 4) конвертируемость – главными особенностями машинного представления данных являются
1 и 2
Из перечисленного: 1) вход; 2) процесс; 3) внешние воздействия; 4) обратная связь – системными объектами являются
1, 2, 4
Из перечисленного: 1) выбор структуры модели; 2) дискретизация процесса; 3) оценка параметров модели – в вероятностной модели используются
1, 3
Из перечисленного: 1) вычислительные средства; 2) программные средства; 3) человек – в состав АСУ входят
1, 2, 3
Из перечисленного: 1) горизонтальный; 2) вертикальный; 3) пространственный; 4) функциональный – основными типами дифференциации являются
1, 2, 3
Из перечисленного: 1) идентификатор; 2) сущность; 3) вид; 4) реализация – описание связи в информационной модели включает
1, 2, 3
Из перечисленного: 1) искусственные; 2) генерирующие; 3) прямого отображения; 4) природные – реальными видами систем являются
1, 4
Из перечисленного: 1) искусственные; 2) генерирующие; 3) прямого отображения; 4) природные – абстрактными видами систем являются
2, 3
Из перечисленного: 1) источники; 2) потребители; 3) средства обработки – по отношению к обрабатываемой информации элементы системы выступают как
1, 2, 3
Из перечисленного: 1) количество; 2) значение; 3) форма; 4) содержание – на эффективность системы влияют характеристики составных частей структуры
1, 2, 3, 4
Из перечисленного: 1) координация; 2) усовершенствование; 3) развитие; 4) техническое обслуживание – основными являются
2, 3, 4
Из перечисленного: 1) математическое программирование; 2) теория массового обслуживания; 3) теория распознавания образов; 4) теория вероятности – разделами исследования операций являются
1, 2,
Из перечисленного: 1) набор правил «ЕСЛИ-ТО»; 2) экспертные оценки; 3) набор логических выражений «И», «ИЛИ» – экспертная система принятия решения MYCIN использует
1 и 2
Из перечисленного: 1) набор правил «ЕСЛИ-ТО»; 2) экспертные оценки; 3) набор логических выражений «И», «ИЛИ» – экспертная система принятия решения PROSPECTOR использует
1, 2, 3
Из перечисленного: 1) наименование; 2) цена; 3) адрес производителя; 4) цвет – компьютерными данными являются
1, 2, 3, 4
Из перечисленного: 1) обработка больших объемов информации; 2) выработка новых знаний; 3) обеспечение процессов принятия решения; 4) обеспечение процессов управления – являются задачами экспертных систем
2 и 3
Из перечисленного: 1) оперативность; 2) простота; 3) гибкость; 4) единоначалие – достоинствами линейной структуры управления являются
1, 2, 4
Из перечисленного: 1) оперативность; 2) простота; 3) гибкость; 4) единоначалие – достоинствами матричной структуры управления являются
1, 3
Из перечисленного: 1) определение оптимального состава элементов; 2) определение оптимальных взаимосвязей элементов; 3) определение оптимального распределения функций между элементами – при синтезе структуры управляемой системы используются
1, 2
Из перечисленного: 1) переменные; 2) константы; 3) программы – данными являются
1, 2
Из перечисленного: 1) планирование; 2) ремонт; 3) анализ; 4) обучение – основными типами деятельности экспертных систем являются
1, 2, 4
Из перечисленного: 1) последовательное вертикальное расположение подсистем; 2) приоритет действий подсистем верхнего уровня; 3) сложное горизонтальное расположение подсистем одного уровня – свойствами иерархической системы являются
1, 2
Из перечисленного: 1) принятие стратегических решений; 2) принятие оперативных решений; 3) стабильность внешней среды; 4) нестабильность внешней среды – централизация управления желательна при условиях
1, 3
Из перечисленного: 1) принятие стратегических решений; 2) принятие оперативных решений; 3) стабильность внешней среды; 4) нестабильность внешней среды – децентрализация управления желательна при условиях
2, 4
Из перечисленного: 1) распределение ресурсов; 2) адаптация; 3) анализ ретроспекции – при стратегическом планировании основным видом управленческой деятельности являются
1, 2
Из перечисленного: 1) сбор информации; 2) выявление проблемы; 3) реализация решения проблемы – этапами системного анализа являются
2, 3
Из перечисленного: 1) символьные языки программирования; 2) системы управления базами данных; 3) языки программирования высокого уровня; 4) языки программирования низкого уровня – инструментальными средствами создания экспертных систем являются
1 и 3
Из перечисленного: 1) системный объект; 2) вид процесса; 3) самостоятельное понятие – в системном подходе ограничением является
1, 2
Из перечисленного: 1) структурный; 2) адаптационный; 3) размерностный; 4) эволюционный – аспектами сложности являются
1, 2, 4
Из перечисленного: 1) универсальность; 2) компетентность; 3) развитый диалог с пользователем; 4) самосознание – от других программ экспертные системы отличают
2 и 4
Из перечисленного: 1) устойчивость; 2) безотказность; 3) долговечность; 4) способность к восстановлению – в понятие «надежность системы» входят(ит)
2, 3, 4
Имитационное моделирование есть представление системы
динамическое
Импульсная переходная функция системы автоматического управления является обратным преобразованием Лапласа от
передаточной функции
Каждой решетчатой функции может соответствовать количество непрерывных функций
бесконечное множество
Кибернетическими называются системы
управляемые
Компетентность эксперта – это
степень квалификации
Конформизм эксперта – это
свойство поддаваться общему мнению
Корни уравнения, полученного приравниванием к нулю полинома числителя передаточной функции, называются
нулями
Корни уравнения, полученного приравниванием к нулю полинома числителя передаточной функции, называются
полюсами
Краткосрочные цели охватывают период
до 1 года
Креативность эксперта – это
способность решать творческие задачи
Критерий Михайлова позволяет судить о запасе устойчивости линейных систем автоматического управления по степени удаленности от начала координат точки пересечения годографом следующей полуоси
отрицательной вещественной
Логарифмическая амплитудная частотная характеристика имеет постоянное значение во всем диапазоне частот у типового звена
чистого запаздывания
Логарифмической амплитудной частотной характеристикой системы автоматического управления называется кривая, соответствующая числу десятичных логарифмов модуля передаточной функции системы, равному
20
Макроскопический подход подразумевает
представление системы в виде «черного ящика»
Математическая модель элемента, его части, группы элементов или всей системы автоматического управления, для которых задается лишь зависимость, описывающая характер процессов без рассмотрения их физической сущности, называется
динамическим звеном
Матричный анализ при построении дерева целей есть
установление взаимосвязи и дублирование целей
Между моментами квантования дискретизированная система действует как
разомкнутая
Меняется только передаточная функция настраивающегося элемента у систем
пассивных адаптивных
Метод восстановления непрерывного сигнала после ЭВМ, при котором он кусочно-постоянен, непрерывен справа и равен сигналу квантования в моменты квантования, называется приближением _________ порядка
нулевого
Метод Дельфи основан на
анкетировании
Метод переменных состояния в теории автоматического управления основан на понятии
состояния динамической системы
Модель является
системой
Модулированная последовательность d-функций представляет собой функцию
решетчатую
Модуляцией отдельных импульсов, входящих в последовательность, называется их
формирование
Модуляция, при котором выходной сигнал представляет собой последовательность импульсов, амплитуда которых является функцией величины входного сигнала в момент выборки, называется
амплитудно-импульсной
Модуляция, при котором выходной сигнал представляет собой последовательность импульсов, длительность которых является функцией амплитуды входного сигнала в момент выборки, называется
широтно-импульсной
На низких частотах при w®0 приближенная передаточная функция экстраполятора нулевого порядка предсталяет собой
апериодическое звено
На первом этапе процесса проектирования цифровой системы автоматического управления осуществляется
выбор принципа управления
На последнем этапе процесса проектирования цифровой системы автоматического управления осуществляется
проектирование отдельных контуров управления
На практике в цифровых системах управления значение частоты дискретизации относительно величины полосы пропускания системы обычно выбирается в
10 раз больше
Наиболее удобной формой записи линейных уравнений динамических звеньев и систем автоматического управления является
передаточная функция
Нахождение структуры и параметров устройства, включение которого в систему обеспечивает качество управления в соответствии с заданными требованиями, представляет собой
синтез корректирующего устройства
Не оказывают влияния на динамику цифровой системы управления характеристики
цифро-аналогового преобразователя
Независимость какой-либо переменной системы автоматического управления от воздействия любого вида означает ее
инвариантность
Необходимое и достаточное условие устойчивости цифровой системы автоматического управления: все корни характеристического уравнения по модулю должны быть меньше
1
Необходимое условие устойчивости линейной системы автоматического управления при использовании коэффициента устойчивости ![]() формулируется следующим образом
формулируется следующим образом
0 £ Mk £ 1
Область применения концепции слоев
вертикальная декомпозиция
Область применения концепции страт
моделирование
Область применения концепции эшелонов
связь органов принятия решения
Обратным Z-преобразованием импульсной передаточной функции дискретной системы является импульсная
весовая функция
Объект – это
абстракция экземпляра
Объекты управления, в которых после снятия возмущения выходная величина с течением времени без вмешательства управляющего устройства может неограниченно изменяться до аварийного состояния или до полной остановки объекта, называются
астатическими
Объекты управления, в которых при математическом описании предполагается, что все их параметры находятся в одной точке, а переменные, описывающие динамику объекта, являются функциями только времени, называются объектами
с сосредоточенными параметрами
Оптимально организованными гомеостатическими системами называются системы, которые для обеспечения стабильности
потребляют минимально возможные величины затрат
Основное достоинство аналитической модели
фундаментальность выводов
Основной недостаток аналитической модели
низкая адекватность
Основной проблемой целеобразования является
отсутствие строгой формализации
Основным затруднением при работе интерпретирующих экспертных систем является
обработка неточной информации
Отличие критерия устойчивости Михайлова для дискретных систем от критерия для непрерывных систем заключается в том, что годограф Михайлова для дискретных систем проходит количество квадрантов в
2 раза больше
Отношение амплитуды установившегося выходного гармонического сигнала к амплитуде входного гармонического сигнала при фиксированной частоте входного сигнала представляет собой
амплитудную частотную характеристику
Отрицательная обратная связь обеспечивает в системе
устойчивость
Оценка качества системы автоматического управления заключаются в анализе ее
переходной характеристики
Передаточная функция системы автоматического управления, состоящей из динамического звена с передаточной функцией W(p) , охваченного единичной отрицательной обратной связью, равна
A) 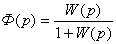
Переход системы в состояния, не предусмотренные ее генетической структурой,
невозможен
Переходная (свободная) составляющая процесса в дискретной системе затухает, если все корни характеристического уравнения по модулю
меньше единицы
Переходная характеристика цифровой системы стремится к соответствующей характеристике непрерывной системы, если период квантования стремится к
0
Показатель сдвига по фазе установившегося выходного гармонического сигнала по отношению к входному гармоническому сигналу при фиксированной частоте входного сигнала представляет собой
фазовую частотную характеристику
Полином знаменателя передаточной функции системы автоматического управления называется
характеристическим
Порог Эрмана-Берби равен
10100
После фильтрации и дискретизации непрерывного сигнала для обработки в ЭВМ следует процедура использования управляющего цифрового сигнала для управления непрерывным объектом, т. е. процедура
восстановления сигнала
Правая первая разность решетчатой функции f(kT0) определяется по
будущему ее значению при t = (k + 1)T0
Преимуществом использования безразмерной формы алгебраических критериев устойчивости по сравнению с классической является возможность
сравнения систем по запасу устойчивости
Преобразование Лапласа дискретной функции времени является функцией
периодической
Преобразование Лапласа единичного идеального импульса равно
1
Преобразование, отображающее полубесконечную последовательность дискретных значений сигнала на комплексную плоскость, называется
Z-преобразованием
Преобразованием Фурье от импульсной переходной функции системы автоматического управления является
частотная передаточная функция
При аксиологическом подходе информация рассматривается с точки зрения
практической ценности
При анкетировании ответы на вопросы закрытого типа даются
в форме «да», «нет»
При дискретизации непрерывного сигнала эффект наложения или поглощения частот спектра дискретного сигнала возникает
если не выполняется условие теоремы Котельникова
При использовании алгебраических критериев устойчивости линейных систем, для оценки устойчивости дискретных систем применяется
W-преобразование
При использовании критериев устойчивости для дискретных систем W-преобразование заключается в замене

При использовании ЭВМ передаточная функция цифрового регулятора может быть реализована в виде
программы
При квантовании аналоговых сигналов в аналогово-цифровом преобразователе шаг квантования определяется
длиной слова преобразователя за исключением знакового разряда
При косвенной оценке качества системы интервал частот, при котором значения амплитудной частотной характеристики не превышают величины 0,707 от ее значения при нулевой частоте, называется
полосой пропускания
При математическом описании дискретных процессов используются уравнения
разностные
При нулевой частоте фазовая частотная характеристика имеет значение, отличное от нуля у типового звена
интегрирующего
При описании дискретных систем автоматического управления аналогом дифференциальных уравнений непрерывных систем являются
разностные уравнения
При оценке качества время, в течение которого отклонение выходной величины от установившегося значения станет меньше наперед заданной величины, представляет собой
длительность переходного процесса
При оценке качества метод, основанный на связи между расположением нулей и полюсов передаточной функции системы в замкнутом и разомкнутом состоянии и на изучении их перемещения на плоскости s при изменении параметров системы, является методом
корневого годографа
При оценке качества отношение разности между максимальным и установившимся значениями переходного процесса к установившемуся значению в процентах представляет собой
перерегулирование
При оценке качества по амплитудной частотной характеристике системы отношение ее максимального значения к значению при нулевой частоте представляет собой
показатель колебательности
При оценке качества с помощью частотного метода анализа косвенной характеристикой качества системы автоматического управления является
вещественная частотная характеристика
При построении замкнутых систем управления скорости квантования должны быть больше ширины полосы пропускания в
6 – 10 раз
При практическом проектировании линейных систем автоматического управления рекомендуется назначать запас устойчивости по амплитуде, превышающий величину
6 дБ
При практическом проектировании линейных систем автоматического управления рекомендуется назначать запас устойчивости по фазе, превышающий величину
30°
При разработке компьютеров предпочтительной является система счисления
двоичная
При семантическом подходе информация рассматривается с точки зрения
содержания и формы
При составлении модели цифровой системы с ЭВМ экстраполятор по динамическим свойствам может быть отнесен к элементам
линейным непрерывным
При статистическом методе исследования системы автоматического управления, если задающее и возмущающее воздействия представляют собой стационарные случайные процессы, задача синтеза состоит в определении
точности работы системы
При удалении высокочастотных составляющих в сигналах, обрабатываемых в цифровых системах, обладает наиболее плоской характеристикой в полосе пропускания фильтр
Баттерворта
При удалении высокочастотных составляющих в сигналах, обрабатываемых в цифровых системах, имеет наиболее крутой переход от полосы пропускания к полосе подавления фильтр
Чебышева
При удалении высокочастотных составляющих в сигналах, обрабатываемых в цифровых системах, имеет наибольшее постоянство временного запаздывания фильтр
Бесселя
Принцип построения систем автоматического управления, при котором в процессе работы не производится контроль состояния объекта и изменение внутренних свойств объекта и возмущающие воздействия не оказывают существенного влияния на выходную величину, называется принципом
разомкнутого управления по жесткой программе
Принцип построения систем автоматического управления, при котором в процессе работы не производится контроль состояния объекта, а одно из возмущений существенно влияет на выходную величину и изменяется по заранее известному закону, называется принципом
разомкнутого управления по возмущению
Принцип построения систем автоматического управления, при котором образуется контур отрицательной обратной связи, осуществляющий контроль выходной величины, называется принципом
замкнутого управления по отклонению
Принцип физической осуществимости состоит в том, что ЭВМ
может использовать настоящую и прошлую, но не будущую информацию
Принцип, заключающийся в том, что реакция системы автоматического управления на совокупность внешних воздействий равна сумме реакций на каждое отдельное воздействие, называется принципом
суперпозиции
Приращение значения сигнала на входе АЦП, которое приводит к изменению переменной на выходе на одну единицу (бит), называется
шагом квантования по уровню
Проблема координации заключается в
расчете взаимодействия
Продукционный способ представления знаний основан на
правилах типа «ЕСЛИ - ТО»
Процедура преобразования данных из непрерывной формы в дискретную называется
квантованием
Процедура преобразования нелинейных уравнений в линейные называется
линеаризацией
Процесс, возникающий в системе автоматического управления от любого воздействия, называется
переходным
Работой станка с ЧПУ управляет
АСУТП
Разрешающей способностью аналогово-цифрового преобразователя называется наименьшее значение переменной на его входе, когда символ младшего разряда числа на выходе
изменяется с 0 на 1
Реакция системы автоматического управления на единичное импульсное воздействие или дельта-функцию при нулевых начальных условиях называется
функцией веса
Реакция системы автоматического управления на единичное ступенчатое воздействие при нулевых начальных условиях называется
переходной функцией
Результирующая логарифмическая амплитудная частотная характеристика цепочки последовательно соединенных динамических звеньев определяется по амплитудным характеристикам этих звеньев путем их
суммирования
Решение задачи управления – это определение
управляющих переменных
С точки зрения устойчивости линейная система автоматического управления с характеристическим уравнением ![]()
находится на границе устойчивости
С точки зрения устойчивости линейная система автоматического управления с характеристическим полиномом ![]()
неустойчива
С увеличением величины периода квантования степень потери информации
увеличивается
Самосознание экспертной системы – это
объяснение механизма решения задачи
Самый простой способ приближенного преобразования дискретного импульсного сигнала в непрерывный – это способ
запоминания
Свойство системы автоматического управления возвращаться в исходное состояние после снятия возмущающего воздействия называется
устойчивостью
Свойство эквифинальности означает достижение
системой одной цели разными путями
Синтез структуры управляющей системы включает оптимизацию
распределения функций между элементами
Синтез цифровой системы состоит в определении
оптимального закона управления, обеспечивающего экстремум заданного критерия
Система автоматического управления, содержащая ЭВМ, квантует сигнал
и по уровню, и по времени
Системой с обратной связью называется система, в которой обратной связью охвачено
хотя бы один элемент
Систему управления, получающую исходные данные и выдающую результаты с такой скоростью, которая обеспечивает своевременную реакцию системы на изменения, происходящие во внешней среде, можно определить как систему обработки данных в режиме
реального времени
Системы автоматического управления, которые содержат в своем составе элементы, осуществляющие квантование сигналов по времени, называются
дискретными
Системы автоматического управления, которые, используя текущую информацию о характеристиках внешних воздействий и о динамических характеристиках объекта, осуществляют контролируемые изменения параметров регулятора для улучшения качества функционирования системы, называются
самонастраивающимися
Системы с адаптацией способны выбирать
совокупность процедур
Скорость изменения решетчатой функции характеризуется ее ________ разностью
первой
Совокупность объекта управления и автоматического управляющего устройства называется системой
автоматического управления
Сравнение действительного поведения системы с ожидаемым выполняют экспертные системы
наблюдения
Среднесрочные цели охватывают период
от 1 года до 3 лет
Средством исследования линейных разностных уравнений является дискретный аналог преобразований Лапласа, называемый
Z-преобразованием
Стандартные составные части динамических элементов системы, описываемые дифференциальными уравнениями не выше второго порядка, называются
типовыми звеньями
Степень потери информации при дискретизации в основном зависит от
частоты квантования сигнала
Стратегическое планирование основано на
анализе перспектив
Структурная схема аналогово-цифрового преобразователя может быть представлена в виде последовательного соединения
идеального импульсного элемента и безинерционного звена
Теорема Котельникова определяет соотношение между тактом квантования T0 и максимальной частотой спектра wmax непрерывного сигнала следующим образом

Теорема Котельникова утверждает: для того чтобы непрерывный сигнал можно было точно восстановить по последовательности его дискретных значений, необходимо, чтобы частота квантования по отношению к максимальной частоте спектра сигнала была бы
больше в два раза
Типовое воздействие, которое принимает следующие значения: 0 при t < 0 и 1 при t ³ 0, называется
единичным ступенчатым
Типовое воздействие, которое принимает следующие значения: 0 при t > 0, t < 0 и ¥ при t = 0, называется единичным
импульсным
Типовое звено с передаточной функцией ![]() является
является
усилительным
Типовое звено с передаточной функцией ![]() является
является
интегрирующим
Типовое звено с передаточной функцией ![]() является
является
апериодическим
Типовое звено с передаточной функцией ![]() является
является
колебательным
Типовое звено с передаточной функцией ![]() является
является
дифференцирующим первого порядка
Типовое звено с передаточной функцией ![]() является
является
дифференцирующим второго порядка
Типовое звено, у которого фазовая частотная характеристика равна минус p/2, является звеном
интегрирующим
У апериодического звена асимптотическая амплитудная характеристика на больших частотах имеет наклон
минус 20 дБ/дек
У апериодического звена логарифмическая фазовая частотная характеристика на больших частотах стремиться к значению
минус p/2
У гибких систем могут изменяться
параметры и структура
У дифференцирующего звена первого порядка логарифмическая фазовая частотная характеристика на больших частотах стремиться к значению
плюс p/2
У жестких систем могут изменяться
только параметры
У колебательного звена асимптотическая амплитудная характеристика на больших частотах имеет наклон
минус 40 дБ/дек
У колебательного звена логарифмическая фазовая частотная характеристика на больших частотах стремиться к значению
минус p
У типового звена чистого запаздывания фазовая частотная характеристика при частоте, стремящейся к ¥ , стремится к
минус ¥
Управление в модельной системе основывается на
имеющихся знаниях
Управление, осуществляемое с помощью специальных технических устройств без непосредственного участия человека, называется
автоматическим
Уравнение, описывающее процессы в системе автоматического управления при различных входных воздействиях, представляет собой уравнение
динамики
Уравнение, описывающее установившийся процесс в системе автоматического управления после завершения переходного процесса, представляет собой уравнение
статики
Условие физической реализуемости системы с передаточной функцией 
n<m
Установившаяся ошибка в дискретной системе не зависит от
периода квантования
Установите правильную последовательность этапов процесса проектирования цифровой системы автоматического управления (1) выбор управляющих переменных (2) выбор измеряемых переменных (3) проектирование отдельных контуров управления (4) выбор принципа управления (5) установление связей между входными и выходными переменными
(4)®(1)®(2)®(5)®(3)
Установите соответствие 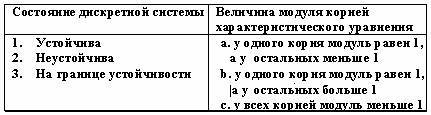
1-c, 2-b, 3-a
Устойчивость нелинейных систем определяется структурой, параметрами и
начальными отклонениями
Устройство, которое до определенной частоты, называемой полосой пропускания, имеет отношение амплитуды выходного сигнала к входному близкое к 1, а с частоты запирания это отношение становиться равным 0, представляет собой
фильтр
Фрейм в экспертных системах есть
единица представления знания
Фундаментальное свойство динамических систем, связанное с возможностью перевода системы из заданного начального состояния в любое другое, называется
управляемостью
Функциональная зависимость, по которой входная величина регулятора преобразуется в нем в выходную и поступает через исполнительное устройство на вход объекта управления в виде управляющей величины, называется законом
регулирования
Функция, являющаяся преобразованием Фурье корреляционной функции и характеризующая распределение энергии сигнала по спектру частот, представляет собой
спектральную плотность
Цифро-аналоговый преобразователь можно представить состоящим из
амплитудно-импульсного преобразователя и экстраполирующего устройства
Цифровая автоматическая система будет удовлетворять заданным показателям качества только в том случае, когда выбор периода квантования будет осуществляться исходя из величины
частоты среза системы
Частотные передаточные функции цифровых систем автоматического управления можно получить в результате подстановки
z = exp(jwT0)
Чтобы решить проблему поглощения частот, необходимо перед квантованием для непрерывной входной величины осуществлять
фильтрацию
Экстраполятор m-го порядка определяют как экстраполятор, выход которого в данный момент зависит от прошлых дискретных значений на его входе, количество которых равно
m + 1
