
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
обратной связью по выходу
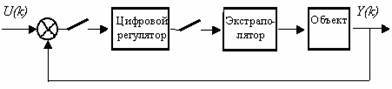 На рисунке приведена структурная схема многомерной цифровой системы с
На рисунке приведена структурная схема многомерной цифровой системы с
последовательно включенным цифровым регулятором
 На рисунке приведена структурная схема многомерной цифровой системы с
На рисунке приведена структурная схема многомерной цифровой системы с
обратной связью по состоянию и наблюдателем
В дискретной системе поведение оригинала на бесконечности (при t®¥) определяется поведением Z-изображения функции (1–z–1)F(z) при z стремящемся к
1
В дискретной стационарной системе, описываемой разностными уравнениями в пространстве состояний, коэффициенты матрицы системы и матрицы управления зависят от
такта квантования
В дискретных системах автоматического управления управляющая ЭВМ
является одним из главных элементов системы, реализующих закон управления
В дискретных системах период квантования должен быть меньше времени нарастания переходного процесса в
2–3 раза
Вопрос-Ответ для АСПЗ 5+
В области корней граница устойчивости дискретной системы представляет собой окружность с радиусом, равным
1
В области корней граница устойчивости линейной непрерывной системы – мнимая ось при помощи соотношения ![]() преобразуется в границу устойчивости линейной цифровой системы, представляющую
преобразуется в границу устойчивости линейной цифровой системы, представляющую
единичный круг
В основе традиционных методов синтеза цифровых систем управления лежит идея о
жестко заданной структуре системы
В программно-управляемых устройствах цифровых систем автоматического управления широкое распространение получили
микропроцессоры
В цифровых системах автоматического управления используется квантование
по уровню и по времени
В цифровых системах автоматического управления наибольшее распространение получила модуляция
амплитудно-импульсная
В цифровых системах относительный шаг квантования по уровню при длине слова, равной n бит, определяется выражением
![]()
В цифровых системах управления выбор интервала дискретизации по времени практически определяется
длиной слова ЭВМ
В цифровых системах управления функцией периферии ЭВМ является
сбор исходных данных и их обработка
В цифровых системах управления функцией центральных устройств ЭВМ является
реализация управляющих алгоритмов
В цифровых системах устройство, определяющее значение амплитуды входного сигнала на интервал вперед, называется
экстраполятором
Во избежание ошибок, связанных с квантованием по уровню, в цифровых системах управления разрядность процессора ЭВМ относительно разрядности слов АЦП и ЦАП должна быть
значительно больше
Время ответа управляющей ЭВМ ТЭВМ должно быть связано с частотой среза fср соотношением

Выбор величины периода квантования должен проводиться на основании выполнения требования адекватности информативности непрерывной и цифровой частей автоматической системы, которые обеспечиваются, если частота квантования больше значения частоты среза системы в
6–8 раз
Выбор закона управления и значения коэффициентов цифровой системы управления, если известны характеристики объекта управления и заданы требования к системе, является задачей
синтеза
Выбор правильного периода квантования дискретной системы не зависит от
потребляемой мощности
Выражение ![]() представляет собой передаточную функцию
представляет собой передаточную функцию
экстраполятора нулевого порядка
Выражение ![]() является Z-преобразованием функции
является Z-преобразованием функции
f(t) = 1
Дискретная система переходит в непрерывную при периоде квантования Т0
стремящимся к нулю
Для дискретной функции fT(t) выражение ![]() получило название
получило название
дискретного преобразования Лапласа
Если длительность импульса сохраняется экстраполятором до момента поступления следующего импульса, он называется экстраполятором порядка
нулевого
Если известно описание дискретных процессов в пространстве состояний, то, применив Z-преобразование, можно получить
импульсную передаточную функцию системы
Если известны модели непрерывного типа, описывающие поведение объектов с сосредоточенными параметрами, то при малых тактах квантования разностные уравнения можно получить из дифференциальных путем их
дискретизации
Если решетчатая функция определена только для положительных значений аргумента, т. е. f(k) = 0 при k < 0, то в точке k = 0 левая n-разностьÑ nf(0) для любого целого положительного n равна
f(0)
Если характеризовать процессор управляющей ЭВМ только функцией передачи информации, то его описание можно выполнить с помощью
цифрового фильтра и элемента запаздывания
Каждой решетчатой функции может соответствовать количество непрерывных функций
бесконечное множество
Между моментами квантования дискретизированная система действует как
разомкнутая
Метод восстановления непрерывного сигнала после ЭВМ, при котором он кусочно-постоянен, непрерывен справа и равен сигналу квантования в моменты квантования, называется приближением _________ порядка
нулевого
Модулированная последовательность d-функций представляет собой функцию
решетчатую
Модуляцией отдельных импульсов, входящих в последовательность, называется их
формирование
Модуляция, при котором выходной сигнал представляет собой последовательность импульсов, амплитуда которых является функцией величины входного сигнала в момент выборки, называется
амплитудно-импульсной
Модуляция, при котором выходной сигнал представляет собой последовательность импульсов, длительность которых является функцией амплитуды входного сигнала в момент выборки, называется
широтно-импульсной
На низких частотах при w®0 приближенная передаточная функция экстраполятора нулевого порядка предсталяет собой
апериодическое звено
На первом этапе процесса проектирования цифровой системы автоматического управления осуществляется
выбор принципа управления
На последнем этапе процесса проектирования цифровой системы автоматического управления осуществляется
проектирование отдельных контуров управления
На практике в цифровых системах управления значение частоты дискретизации относительно величины полосы пропускания системы обычно выбирается в
10 раз больше
Не оказывают влияния на динамику цифровой системы управления характеристики
цифро-аналогового преобразователя
Необходимое и достаточное условие устойчивости цифровой системы автоматического управления: все корни характеристического уравнения по модулю должны быть меньше
1
Обратным Z-преобразованием импульсной передаточной функции дискретной системы является импульсная
весовая функция
Отличие критерия устойчивости Михайлова для дискретных систем от критерия для непрерывных систем заключается в том, что годограф Михайлова для дискретных систем проходит количество квадрантов в
2 раза больше
Переходная (свободная) составляющая процесса в дискретной системе затухает, если все корни характеристического уравнения по модулю
меньше единицы
Переходная характеристика цифровой системы стремится к соответствующей характеристике непрерывной системы, если период квантования стремится к
0
После фильтрации и дискретизации непрерывного сигнала для обработки в ЭВМ следует процедура использования управляющего цифрового сигнала для управления непрерывным объектом, т. е. процедура
восстановления сигнала
Правая первая разность решетчатой функции f(kT0) определяется по
будущему ее значению при t = (k + 1)T0
Преобразование Лапласа дискретной функции времени является функцией
периодической
Преобразование Лапласа единичного идеального импульса равно
1
Преобразование, отображающее полубесконечную последовательность дискретных значений сигнала на комплексную плоскость, называется
Z-преобразованием
При дискретизации непрерывного сигнала эффект наложения или поглощения частот спектра дискретного сигнала возникает
если не выполняется условие теоремы Котельникова
При использовании алгебраических критериев устойчивости линейных систем, для оценки устойчивости дискретных систем применяется
W-преобразование
При использовании критериев устойчивости для дискретных систем W-преобразование заключается в замене

При использовании ЭВМ передаточная функция цифрового регулятора может быть реализована в виде
программы
При квантовании аналоговых сигналов в аналогово-цифровом преобразователе шаг квантования определяется
длиной слова преобразователя за исключением знакового разряда
При математическом описании дискретных процессов используются уравнения
разностные
При построении замкнутых систем управления скорости квантования должны быть больше ширины полосы пропускания в
6 – 10 раз
При составлении модели цифровой системы с ЭВМ экстраполятор по динамическим свойствам может быть отнесен к элементам
линейным непрерывным
При удалении высокочастотных составляющих в сигналах, обрабатываемых в цифровых системах, обладает наиболее плоской характеристикой в полосе пропускания фильтр
Баттерворта
При удалении высокочастотных составляющих в сигналах, обрабатываемых в цифровых системах, имеет наиболее крутой переход от полосы пропускания к полосе подавления фильтр
Чебышева
При удалении высокочастотных составляющих в сигналах, обрабатываемых в цифровых системах, имеет наибольшее постоянство временного запаздывания фильтр
Бесселя
Принцип физической осуществимости состоит в том, что ЭВМ
может использовать настоящую и прошлую, но не будущую информацию
Приращение значения сигнала на входе АЦП, которое приводит к изменению переменной на выходе на одну единицу (бит), называется
шагом квантования по уровню
Процедура преобразования данных из непрерывной формы в дискретную называется
квантованием
Разрешающей способностью аналогово-цифрового преобразователя называется наименьшее значение переменной на его входе, когда символ младшего разряда числа на выходе
изменяется с 0 на 1
С увеличением величины периода квантования степень потери информации
увеличивается
Самый простой способ приближенного преобразования дискретного импульсного сигнала в непрерывный – это способ
запоминания
Синтез цифровой системы состоит в определении
оптимального закона управления, обеспечивающего экстремум заданного критерия
Система автоматического управления, содержащая ЭВМ, квантует сигнал
и по уровню, и по времени
Систему управления, получающую исходные данные и выдающую результаты с такой скоростью, которая обеспечивает своевременную реакцию системы на изменения, происходящие во внешней среде, можно определить как систему обработки данных в режиме
реального времени
Скорость изменения решетчатой функции характеризуется ее ________ разностью
первой
Средством исследования линейных разностных уравнений является дискретный аналог преобразований Лапласа, называемый
Z-преобразованием
Степень потери информации при дискретизации в основном зависит от
частоты квантования сигнала
Структурная схема аналогово-цифрового преобразователя может быть представлена в виде последовательного соединения
идеального импульсного элемента и безинерционного звена
Теорема Котельникова определяет соотношение между тактом квантования T0 и максимальной частотой спектра wmax непрерывного сигнала следующим образом

Теорема Котельникова утверждает: для того чтобы непрерывный сигнал можно было точно восстановить по последовательности его дискретных значений, необходимо, чтобы частота квантования по отношению к максимальной частоте спектра сигнала была бы
больше в два раза
Условие физической реализуемости системы с передаточной функцией 
n<m
Установившаяся ошибка в дискретной системе не зависит от
периода квантования
Установите правильную последовательность этапов процесса проектирования цифровой системы автоматического управления (1) выбор управляющих переменных (2) выбор измеряемых переменных (3) проектирование отдельных контуров управления (4) выбор принципа управления (5) установление связей между входными и выходными переменными
(4)®(1)®(2)®(5)®(3)
Установите соответствие 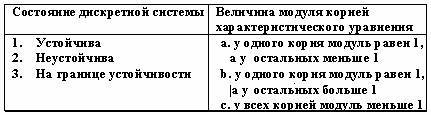
1-c, 2-b, 3-a
Устройство, которое до определенной частоты, называемой полосой пропускания, имеет отношение амплитуды выходного сигнала к входному близкое к 1, а с частоты запирания это отношение становиться равным 0, представляет собой
фильтр
Фундаментальное свойство динамических систем, связанное с возможностью перевода системы из заданного начального состояния в любое другое, называется
управляемостью
Цифро-аналоговый преобразователь можно представить состоящим из
амплитудно-импульсного преобразователя и экстраполирующего устройства
Цифровая автоматическая система будет удовлетворять заданным показателям качества только в том случае, когда выбор периода квантования будет осуществляться исходя из величины
частоты среза системы
Частотные передаточные функции цифровых систем автоматического управления можно получить в результате подстановки
z = exp(jwT0)
Чтобы решить проблему поглощения частот, необходимо перед квантованием для непрерывной входной величины осуществлять
фильтрацию
Экстраполятор m-го порядка определяют как экстраполятор, выход которого в данный момент зависит от прошлых дискретных значений на его входе, количество которых равно
m + 1
