


Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Московский государственный институт электроники и математики
Кафедра электронно-вычислительной аппаратуры
Домашняя работа по дисциплине:
"Основы теории управления"
Выполнил: студент группы С-54
Руководитель:
д. т.н. профессор
Москва 2006
Аннотация
Задачами линейной теории автоматического управления и регулирования являются:
1. изучение динамических свойств и характеристик различных типов звеньев автоматических систем любой физической природы и конструкции;
2. формирование функциональных и структурных схем автоматического управления и регулирования;
3. построение динамических характеристик этих систем;
4. определение ошибок и показателей точности замкнутых систем;
5. исследование устойчивости замкнутых систем;
6. оценка качественных показателей процессов управления;
7. определение чувствительности систем к изменению параметров и других факторов;
8. изучение различных видов корректирующих устройств, вводимых в системы для повышения точности и улучшения динамических качеств;
9. создание частотных, корневых и других методов синтеза корректирующих устройств и различных методов оптимизации систем по показателям качества;
10. разработка методов анализа и синтеза сложных многомерных и комбинированных систем автоматического управления.
В данной работе проводится определение коэффициента усиления звена системы управления и анализ устойчивости этой линейной системы. Для этой цели используются:
· Алгебраические критерии. Они позволяют судить об устойчивости системы по коэффициентам характеристического уравнения;
· Частотные (геометрические) критерии, позволяющие судить об устойчивости систем по виду их частотных характеристик. Эти критерии являются графоаналитическими и позволяют сравнительно легко исследовать устойчивость систем высокого порядка, а также имеют простую геометрическую интерпретацию.
Все это является базой для построения замкнутых автоматических систем и для инженерных расчетов при анализе существующих и проектировании новых систем автоматического управления. Эти методы широко применяются не только для систем регулирования и управления как таковых, но и во всех случаях анализа и разработки замкнутых динамических контуров в любых технических системах, в биотехнических и в экономических системах.
1. Техническое задание
Для заданной модели определить коэффициент усиления (K) звена системы с тем, что система будет:
· Устойчивой;
· Неустойчивой.
Параметры системы:
· w1=Ap=0.8p
· w2=0.2p/(0.015p+1)
· w3= K
· w4= 0.009p2+0.095p+1
· w5=0.004/(0.07p2+0.01p+1)
· w6=0.002p+1
· w7=0.5/(0.01p+1)
· w8=0.1/p2
- w9=0.3/(0.5p2+1)
Преобразования системы
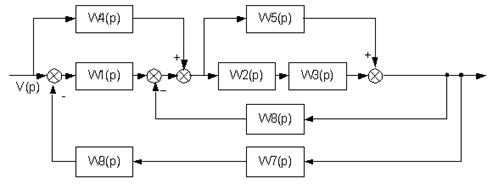
Модель по V-входу
Вначале упрощаем схему по правилам структурных преобразований:
|
|
|
|
|
|
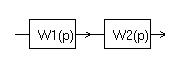
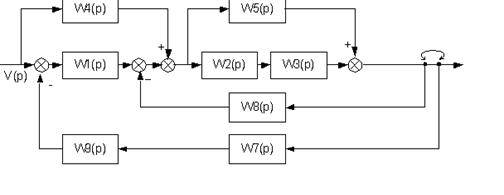
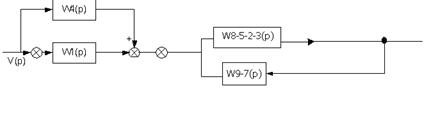
Преобразуем схему:
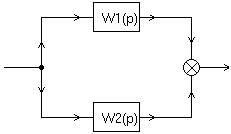
Рассмотрим блок, содержащий w2,w3 и w5
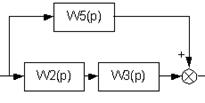
W5-2-3(р) = W2(p)*W3(p)+W5(p)
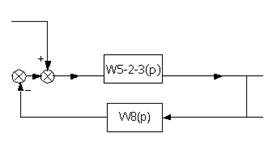
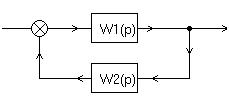
W8-5-2-3(р)= _____W2(p)*W3(p)+W5(p)_____
1+W8(p)*(W1(p)*W3(p)+W5(p))
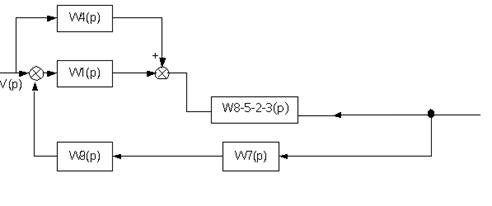
W9-7(р)= W9(p)*W7(p)
W(р)= W2(p)*W3(p)+W5(p)_____ .
_1+W8(p)*(W1(p)*W3(p)+W5(p))____________ .
1+ ____(W2(p)*W3(p)+W5(p))*W1(p)*W7(p)*W9(p)
1+W8(p)*(W1(p)*W3(p)+W5(p))
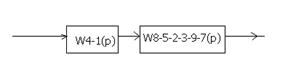
W4-1(р)= W1(p)+W4(p)
W-9-7(р)= W1(p)*W2(p)*W3(p)+W1(p)*W5(p)+W2(p)*W3(p)*W4(p)+W4(p)*W5(p)_________________
1+W1(p)*W3(p)*W8(p)+W5(p)*W8(p)+W1(p)*W2(p)*W3(p)*W7(p)*W9(p)+W1(p)*W5(p)*W7(p)*W9(p)
Получим передаточную функцию:
![]()
Подставим значения wn(p):
![]()
Получим характеристическое уравнение:
P(l)=75l7+(2000+6k)l6+(1750150+1600k)l5+(+164012k)l4+(3985000+6403200k)l3+(1002000+280000k)l2+(10000+8000000k)l1+400000l0
Модель по дестабилизирующему фактору
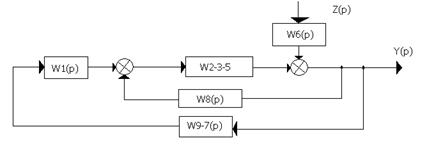
W-8=(W2(p)*W3(p)+W5(p))(W1(p)*W7(p)*W9(p)+W8(p))
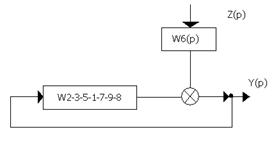
W(p)= ______________________ _______________W6(p) ______________________________________________
1+W1(p)*W2(p)*W3(p)*W7(p)*W9(p)+W1(p)*W5(p)*W7(p)*W9(p)+W2(p)*W3(p)*W8(p)+W5(p)*W8(p)

Знаменатель: ![]()
P(l)=437875l7+l6+l5++l3+l2+225000l1+l0
Получим передаточную функцию:
W(p)= ______________________ _______________W6(p) ______________________________________________
1+W1(p)*W2(p)*W3(p)*W7(p)*W9(p)+W1(p)*W5(p)*W7(p)*W9(p)+W2(p)*W3(p)*W8(p)+W5(p)*W8(p)
Подставим значения wn(p):
![]() Получим характеристическое уравнение:
Получим характеристическое уравнение:
P(l)=75l5+20000l4+(1750162+400k)l3+(+64000k)l2+(3548024+2400800k)l1+80000kl0
Анализ устойчивости системы
Модель по V входу
Метод Льенара-Шипара:
![]()
k>-333,3333333
k>-306,1437090
k>-357.8573571
k>-306,1437090 – необходимое и достаточное условие
D1=75
D3= =
=  =
=
=// при k>-306,1437090 // >= ![]()
D5= =
=
=
при k>-306,1437090 >= ![]()
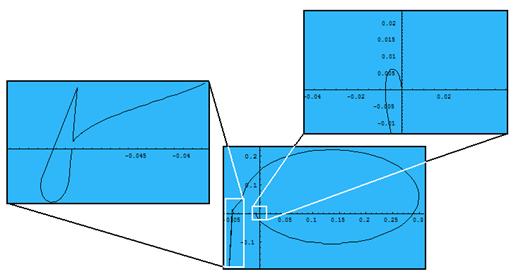
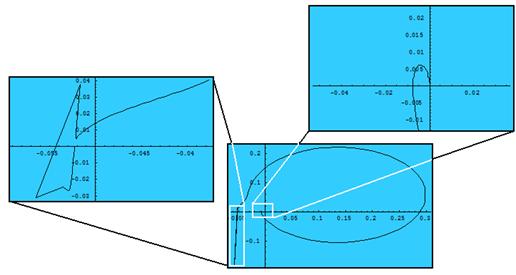
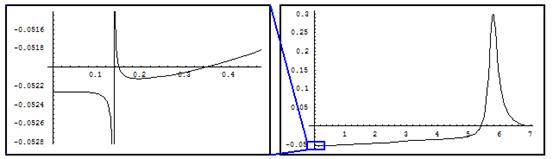
Критерий Михайлова:
Модель по дестабилизирующему фактору
Метод Льенара-Шипара:
k>0 - необходимое и достаточное условие
D1=75
D3= =
=
=![]() =
=
=// при k>// >=
D5= =
=
=![]()
= при k>0
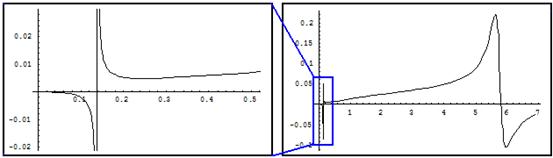
Критерий Михайлова

Характеристики системы
Модель по V входу
Временная характеристика

Амплитудно-фазовая характеристика
Мнимая частотная характеристика
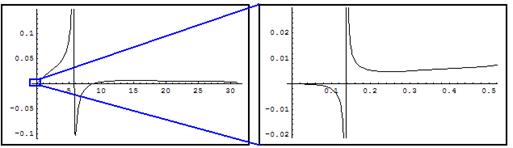
Действительная частотная характеристика
Амплитудно-частотная характеристика
Фазо-частотная характеристика
Модель по дестабилизирующему фактору
Временная характеристика
Амплитудно-фазовая характеристика
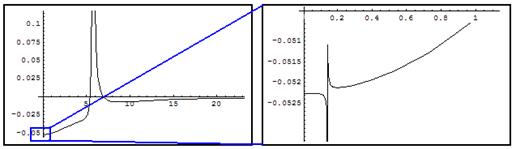
Мнимая частотная характеристика
Действительная частотная характеристика
Амплитудно-частотная характеристика

Фазо-частотная характеристика
Заключение
В ходе анализа система оказалась неустойчивой без дестабилизирующего фактора и устойчивой при его наличии и коэффициенте усиления К>0.
