
Партнерка на США и Канаду по недвижимости, выплаты в крипто
- 30% recurring commission
- Выплаты в USDT
- Вывод каждую неделю
- Комиссия до 5 лет за каждого referral
Министерство образования и науки Российской Федерации
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра автономных информационных и управляющих систем
Моделирование антенн и пассивных СВЧ устройств
Методическое руководство к лабораторным работам по курсу
«Антенны и СВЧ устройства СБЛ»
для студентов АВТФ специальности 210800 направления 550200
УДК 621.396.67
Авторы : , канд. техн. наук,
Рецензенты: , канд. техн. наук
, канд. техн. наук
Работа подготовлена на кафедре
автономных информационных и управляющих систем
В настоящем руководстве излагаются теоретические сведения о применении метода конечных элементов при проектировании антенн и СВЧ устройств, приводится описание работы на электромагнитном симуляторе Agilent HFSS 5.6 и практические сведения по циклу лабораторных работ для дисциплины «Антенны и СВЧ устройства СБЛ».
Издание предназначено для студентов IV курса АВТФ по специальности 210800 направления 550200 и магистрантов по направлению 550212.
Новосибирский государственный технический университет, 2005 г.
Содержание
Теоретические основы моделирования антенн и пассивных СВЧ устройств
Лабораторная работа № 1. Моделирование направляющих систем
Лабораторная работа № 2. Моделирование элементов фидерных линий
Лабораторная работа № 3. Моделирование микрополосковых антенных решеток
Лабораторная работа № 4. Моделирование волноводно-щелевых антенных решеток
Лабораторная работа № 5. Моделирование микрополосковой антенны с круговой поляризацией
Лабораторная работа № 6. Моделирование волноводно-коаксиального перехода
Теоретические основы моделирования антенн и СВЧ устройств
Для моделирования антенн и СВЧ устройств многие годы применяются разнообразные численные методы (метод конечных разностей; метод конечных элементов; метод матриц линий передачи (TLM); метод интегральных уравнений; метод моментов и метод Галеркина; метод поперечного резонанса; метод обобщенной матрицы рассеяния; метод расчета в спектральной области), позволяющие рассчитать характеристики сложных микроволновых структур.
В последние годы с развитием вычислительной техники численные методы легли в основу программного обеспечения, предназначенного для проектирования антенн и СВЧ устройств. На современном этапе развития антенной техники и техники СВЧ уже невозможно обходится без электромагнитных симуляторов, позволяющих существенно сократить дорогостоящий процесс разработки. На рынке существует довольно много средств для моделирования пассивных и активных структур:
Agilent High Frequency Structure Simulator 5.6 ( в основе метод конечных элементов);
Ansoft High Frequency Structure Simulator 8 и выше (метод конечных элементов);
Momentun 2.0 (метод моментов)
Microwave Office (метод Галеркина);
Sonnet (модифицированный метод моментов);
CST Microwave Studio (метод конечных интегралов во временной области);
FIDELITY (конечно-разностный метод во временной области);
IE3D (метод моментов).
При проведении данных лабораторных работ используется Agilent High Frequency Structure Simulator 5.6 (Agilent HFSS 5.6), с помощью которого студенты проводят проектирование направляющих систем различных типов (волновод, коаксиальная линия, микрополосковая линия), элементов тракта (волноводно-коаксиальные переходы, микрополосковые делители мощности) и антенн (микрополоскового излучателя, микрополосковой антенной решетки, волноводно-щелевой антенной решетки), расчет S-параметров, полей в любом сечении структуры, диаграмм направленности антенн, коэффициентов направленного действия и коэффициентов усиления.
Симулятор HFSS, разработанный в фирме Ansoft в 1990 году - первая коммерческая программа, которая моделирует сложные трехмерные конфигурации произвольной формы. После этого программа только увеличила свою популярность, потому что она показала инженерам - проектировщикам широкие возможности расчета на электродинамическом уровне. Ускоряя цикл проектирования, заменяя дорогостоящее и отнимающее много времени макетирование, HFSS является эффективным средством для автоматизированного проектирования. Анализ антенн, СВЧ линий передачи, переключающих схем, волноводных элементов, фильтров ВЧ и трехмерных неоднородностей сводится к черчению структуры, точному определению свойств материала, идентификации портов и введению характеристик поверхностей. В постпроцессоре можно построить характеристики портов и S-параметры, распределения полей в любом интересующем проектировщика сечении с помощью нескольких представлений (амплитудное, векторное, объемное). Многочисленные улучшения программы позволяют в настоящее время поводить широкополосное моделирование, рассчитывать распределение полей в ближней зоне излучения и диаграммы направленности антенн, вектор Пойнтинга, поляризационные характеристики поля, использовать материалы, имеющие анизотропные свойства.
Основу решения трехмерных и двумерных задач электродинамики в HFSS [2.5] составляет метод конечных элементов (Finite Element Method) (FEM). Смысл метода состоит в том, что пространство разбивается на простейшие элементы, имеющие форму тетраэдров. Разбиение осуществляется специальной программой Mesher. Размер тетраэдра должен быть достаточно мал для того, чтобы поле в его пределах можно было описать простой функцией или набором функций с неизвестными коэффициентами. Эти коэффициенты находятся с помощью уравнений Максвелла и граничных условий. В результате электродинамическая задача сводится к системе линейных алгебраических уравнений (СЛАУ) относительно этих коэффициентов. Решение СЛАУ легко реализуется на компьютере.
Адаптивный метод разбиения на блоки делает FEM метод практичным. Начальное разбиение на ячейки сразу предоставит информацию о решении поля, выделяя области с высокой напряженностью поля или с большими градиентами. Разбиение на ячейки затем уплотняется только там, где необходимо, уменьшая вычислительные затраты при максимизации точности. Если необходимо, пользователи могут ввести адаптивное решение, используя интерфейс программы.
Отметим, что в ходе разбиения форма отдельных элементов структуры искажается. Это относится, в первую очередь, к элементам, имеющим искривленную поверхность. Поэтому ограничения на размер тетраэдра накладывает не только точность определения поля, но и точность аппроксимации исходной структуры новой структурой, составленной из тетраэдров.
 |
Пример тетраэдра показан на рисунке 1.
Рисунок 1 – Элемент разбиения трехмерного пространства
Рассмотрим далее алгоритм МКЭ при решении двумерной электростатической задачи. Решение электродинамических трехмерных задач отличается только более сложными математическими выражениями, не внося при этом нового физического содержания.
Для любого дифференциального уравнения в частных производных, описывающего электромагнитный процесс, можно найти соответствующий функционал, выражаемый через электрическое и магнитное поля, либо через потенциалы. Как правило, он обладает стационарными свойствами для совокупности функций, удовлетворяющих заданным граничным условиям.
Пусть требуется найти потенциал электростатического поля в структуре, состоящей из двух металлических проводников: внешнего и внутреннего. Пространство между проводниками заполнено воздухом. Такая структура может служить моделью коаксиальной линии с проводниками со сложным поперечным сечением. Поле в поперечном сечении коаксиальной линии подчиняется уравнению Лапласа, то есть мы имеем дело с электростатической задачей. В электростатике принято выражать поле через электростатический потенциал f, являющийся функцией двух координат х и у. Известно, что потенциал поля на поверхности проводника является постоянной величиной. Поэтому можно положить потенциал внешнего проводника равным нулю, а внутреннего — некоторой величине W. Легко понять, что W — это напряжение между проводниками, создаваемое внешним источником.
Вариационная формулировка МКЭ
Задача определения потенциала f может быть сведена к задаче минимизации следующего функционала ![]() :
:
 ,
,
где S — область, в которой ищется потенциал, то есть область, заключенная между внешним и внутренним проводниками. Под минимизацией функционала понимается поиск такой функции f(х,у), на которой интеграл в (1) достигает своего минимального значения. Из теории уравнения Лапласа известно, что функция, на которой функционал (1) достигает своего минимума, одновременно является решением уравнения Лапласа в той же области S.
Базисные функции и интерполяционные формулы
Ключевым моментом метода конечных элементов является представление неизвестной функции j(x, y) в виде разложения по известным базисным функциям с неизвестными коэффициентами в пределах каждой элементарной ячейки.
Это разложение имеет следующий вид:
![]()
где — неизвестные коэффициенты, ![]() — базисные функции.
— базисные функции.
Коэффициенты ![]() ищутся из условия минимума функционала (1).
ищутся из условия минимума функционала (1).
Особенностью FEM является то, что в качестве неизвестных коэффициентов берутся значения неизвестной функции ![]() в вершинах треугольников для самой простой аппроксимации потенциала. Если речь идет о более сложных функциях, аппроксимирующих потенциал в пределах элементарной ячейки, то в дополнение к значениям
в вершинах треугольников для самой простой аппроксимации потенциала. Если речь идет о более сложных функциях, аппроксимирующих потенциал в пределах элементарной ячейки, то в дополнение к значениям ![]() в вершинах добавляются значения потенциала в других характерных точках. Таким образом, в FEM используется следующее представление неизвестной функции:
в вершинах добавляются значения потенциала в других характерных точках. Таким образом, в FEM используется следующее представление неизвестной функции:
![]()
где ![]() — значения поля в характерных точках.
— значения поля в характерных точках.
Рассмотрим, как получается разложение (3) для простейшего случая линейной аппроксимации потенциала. В исходной форме она имеет следующий вид:
![]() ,
,
где а, ах, ау — постоянные коэффициенты. Рассмотрим некоторую ячейку (рисунок 2), вершины которой имеют номера i, j, k. Тогда для записи разложения (3) нам необходимо выразить постоянные а, ах, ау через значения потенциала в вершинах треугольника Ui, j,k. Сделать это можно, решая следующую очевидную СЛАУ:
Решение (5) в векторной форме имеет следующий вид:
 , где
, где
Теперь мы можем записать разложение типа (3) в компактной векторной форме:
индекс t означает операцию транспонирования. Введем следующее обозначение:
![]()
Тогда с учетом (8) можно записать представление для потенциала, справедливое не только для линейной аппроксимации, но и для любой другой аппроксимации:
![]()
где в общем случае ![]() — вектор значений потенциала не только в вершинах треугольника, но и в других характерных точках.
— вектор значений потенциала не только в вершинах треугольника, но и в других характерных точках.

Рисунок 2
Обычно в FEM используют полиномиальные аппроксимации неизвестной функции, хотя возможны и другие варианты, например, аппроксимация тригонометрическими функциями. Тем не менее, наибольшее распространение получили аппроксимации полными полиномами разных степеней. В частности, функция (4) — это ни что иное, как полный полином первой степени. Полный полином второй степени имеет следующий вид:
![]()
![]()
Аналогично строятся полные полиномы более высоких степеней. Нетрудно убедиться, что число неизвестных коэффициентов растет с ростом порядка полинома. Так, если полином первого порядка содержал три коэффициента, то полином второго порядка уже шесть. Соответственно, в первом случае нам достаточно было трех значений поля в трех точках — вершинах треугольника, а во втором необходимо использовать дополнительные точки, как это показано на рисунке 3.
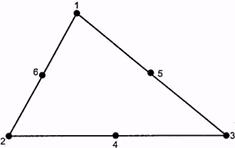
Рисунок 3– Вершины для полного многочлена второй степени на треугольном элементе
Эти точки взяты на серединах отрезков прямых, образующих стороны треугольника. Увеличение порядка полинома требует увеличения точек.
Отметим следующее обстоятельство, проясняющее смысл представления неизвестной функции полиномами разных степеней. По существу, формула (3) дает аппроксимацию поля, которая совпадает с точной функцией в ряде дискретных точек. Эти точки — узловые точки аппроксимации, то есть те самые точки, в которых мы определяли ![]() . Чем больше число узловых точек, тем точнее аппроксимация неизвестной функции. Отметим, что в промежуточных точках аппроксимация всегда отличается от точной функции.
. Чем больше число узловых точек, тем точнее аппроксимация неизвестной функции. Отметим, что в промежуточных точках аппроксимация всегда отличается от точной функции.
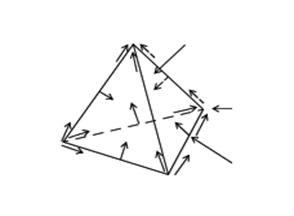
Рисунок 4 – Точки вычисления полей на тетраэдре
Использование большого числа базисных функций в пределах элементарной ячейки повышает точность определения поля (потенциала) и позволяет увеличить размер ячейки при сохранении точности. Таким образом, усложняя аппроксимацию, казалось бы, мы можем уменьшить число разбиений за счет увеличения размера ячейки и ускорить решение задачи. Во многом это иллюзорное представление. Дело в том, что на скорость решения влияет не число ячеек, а число неизвестных коэффициентов, входящих в СЛАУ. С этой точки зрения увеличение размера ячейки за счет увеличения числа базисных функций может ничего не дать, так как общее число неизвестных коэффициентов, равное произведению числа ячеек на число базисных функций, может не измениться или даже увеличиться. Поэтому при численной реализации FEM предпочтение отдают простым аппроксимациям поля полиномами первого и второго порядка.
Вывод и решение СЛАУ в общем случае
Рассмотрим далее реализацию FEM в общем случае, когда число базисных функций равно М. Подставим выражение для потенциала в виде суммы базисных функций в формулу (1):

где индексы i, j, k показывают, что данный параметр относится к треугольнику с вершинами i, j, k. В развернутой форме функционал выглядит следующим образом:

СЛАУ для элементарного треугольника ищется из условия минимума функционала по всем аргументам ![]() :
:
![]()
Применение (13) к (12) приводит к следующей СЛАУ относительно значений потенциала в узловых точках:

![]()
Введем следующее обозначение:

Тогда СЛАУ (14) запишется в компактном виде:
![]()
Аналогичные СЛАУ можно записать для всех элементов разбиения. Объединяя их в одну СЛАУ, получаем:

где N— общее число вершин в разбиении. Матрица Z составлена из элементов матриц Zijk.
Отметим далее, что первые N2 вершины лежат на поверхности металлических проводников. Выделим в векторе U вектора, отвечающие вершинам, лежащим на проводниках:
 ,
,
где индекс о (от английского слова outer — внешний) соответствует вершинам, лежащим на поверхности проводников, а индекс i (от английского слова inner — внутренний) соответствует вершинам, лежащим между проводниками. Тогда СЛАУ (17) приобретает следующий вид:
Отметим, что вектор известен, так как по условию задачи значения потенциала на проводниках заданы.
Поэтому имеет смысл выразить неизвестный вектор ![]() через известный вектор
через известный вектор ![]() :
:
![]()
Соотношение (20) дает формальное решение искомой задачи. Таким образом, нам удалось выразить поле внутри структуры через его значения на границе. Это говорит о том, что изложенный выше алгоритм FEM обладает некоторыми свойствами, сближающими его с методом моментов (МОМ). Действительно, в методе моментов все поля в структуре выражаются через некоторую величину, заданную на поверхности (электрический или магнитный ток). В нашем случае ситуация аналогична. Отличие от метода моментов состоит в том, что МОМ не требует дискретизации пространства и оперирует непрерывными полями и токами, тогда как FEM принципиально основан на дискретизации пространства.
Сравнивая FEM и МОМ, можно отметить следующие обстоятельства. Несомненно, FEM обладает большей универсальностью. Так, для него не составляет особой проблемы анализ структур, содержащих сложные магнито-диэлектрические среды с потерями и анизотропией. Действительно, схема метода не нуждается в какой-либо коррекции в таких случаях: пространство также дискретизируется, а изменяется только вид минимизируемого функционала. В МОМ проблема сложных сред, имеющих сложную форму, всегда связана с поиском подходящего представления функции Грина, выражающей поля в структуре через токи на некоторых поверхностях. Эта работа связана с аналитическими преобразованиями, которые выполняются не компьютером, а разработчиком программы. В ряде интересных случаев, например, для плоско-слоистой среды, функции Грина известны и для них разработаны эффективные численные алгоритмы. Однако во многих ситуациях функцию Грина еще надо искать.
В то же время, использование функции Грина существенно уменьшает размерность решаемой задачи. Действительно, в случае FEM мы вынуждены дискретизировать не поверхность, а пространство. Очевидно, что при этом число элементов дискретизации существенно больше (на порядок). Поэтому в тех случаях, где МОМ может быть реализован, он приводит к увеличению скорости решения и экономии компьютерных ресурсов. Однако там, где решение методом МОМ затруднительно, FEM всегда даст результат.
Особый случай — это антенные задачи, то есть задачи, связанные с расчетом излучения в свободное пространство. Поскольку функция Грина свободного пространства хорошо известна, то, следовательно, и реализация МОМ здесь не должна вызывать затруднений. В то же время, при расчете поля в дальней зоне по FEM необходимо дискретизировать достаточно большую область пространства. Поэтому в этих задачах можно ожидать преимущества МОМ по сравнению с FEM.
Зависимость точности решения от размеров ячейки
Между размером ячейки, желательным уровнем точности и имеющимися в наличии вычислительными ресурсами имеется противоречие. С одной стороны, точность решения зависит от того, насколько мала величина каждого из отдельных элементов (тетраэдров). Решения, которые используют большое количество элементов, более точны, чем решения, выполненные с помощью крупных ячейках, использующих относительно немного элементов. Самым правильным критерием для выбора размеров ячейки является критерий малой вариации поля в ее пределах. В этом случае поле может быть корректно аппроксимировано линейной функцией. Скорость изменения поля зависит от рабочей частоты и неоднородности среды.
С другой стороны, решение задачи при большом количестве ячеек требует применения быстродействующих процессоров и большой оперативной памяти. Поэтому необходимо искать компромисс между точностью решения и временем и ресурсами, необходимыми для его реализации.
Чтобы получить оптимальную ячейку, HFSS использует итерационный процесс, в котором шаг между ячейками автоматически уменьшается в критических областях. Сначала он генерирует решение, основанное на грубом начальном разбиении. Затем он учащает шаг между ячейками, основываясь на соответствующих критериях погрешности, и генерирует новое решение. Когда разница между вновь рассчитанными S-параметрами и найденными на предыдущей итерации сходится с заданной точностью, итерационный процесс заканчивается.
Разбиение пространства на ячейки
Разбиение объекта на элементарные ячейки — тетраэдры являйся самостоятельной достаточно сложной задачей. Она решается специальной программой Mesher. Эта программа в случае трехмерного моделирования работает следующим образом. На первом этапе Mesher использует для построения тетраэдров вершины объектов анализируемой структуры, которые играют роль вершин тетраэдров. Таким образом, создается начальное разбиение, для которого ищется грубое распределение поля. Анализ этого поля позволяет установить наличие областей, в которых поле имеет большую скорость изменения. После выявления таких областей программа осуществляет повторное разбиение, которое уже содержит ячейки меньшего размера в критических областях. При этом в качестве вершин новых тетраэдров используются узлы координатной сетки. Далее электродинамическая задача решается повторно для нового разбиения. Процедура повторяется до полной сходимости процесса. Описанный выше итерационный процесс реализуется в HFSS, когда установлен режим адаптивного изменения размеров ячеек Refinement.
Пользователь программы должен иметь в виду следующие обстоятельства. Разные электродинамические параметры имеют разную скорость сходимости. Наибольшую осторожность надо соблюдать, когда речь идет о вычислении потерь в структурах, содержащих металлические ребра, например, в полосковых структурах. Собственно потери и связанные с ними величины: затухание в линии передачи, добротность резонатора и т. д. могут очень сильно меняться в зависимости от точности аппроксимации тока вблизи металлического ребра. Речь иногда идет не о процентах и даже не о десятках процентов, а о разах. В то же время для той же структуры некоторые S-параметры могут реагировать на размер ячейки значительно слабее. Следовательно, пользователь должен критически относиться к полученному компьютером результату и контролировать его точность, оценивая качество разбиения хотя бы визуально. Во всяком случае, появление ячеек с размерами большими ![]() (
(![]() – длина волны в среде, для которой ищется решение) нежелательно.
– длина волны в среде, для которой ищется решение) нежелательно.
Адаптивное разбиение плоскостей портов
При решении трехмерных задач HFSS использует решения двумерных задач, которые появляются при анализе поля в сечении порта. Поэтому программа Mesher осуществляет также разбиение плоскостей на ячейки, которые имеют треугольную форму. Процедура разбиения на плоскости не отличается от описанной выше процедуры для пространства. Это также адаптивная процедура, которая повторяется многократно вплоть до полной сходимости процесса.
Разбиение на плоскости связано с разбиением пространства. Дело в том, что найденные в ходе решения двумерной задачи собственные волны входных линий передачи используются далее для постановки граничных условий в плоскости порта. Это означает, что трехмерное решение для пространства должно совпадать с двумерным решением на плоскости в области порта. Для полного тождества этих решений сечение трехмерного разбиения плоскостью порта должно совпадать с двумерным разбиением на плоскости. Для того чтобы обеспечить такое совпадение, программа Mesher использует в качестве вершин тетраэдров вершины треугольников двумерного разбиения на плоскости порта.
Вычисление полей
Известно, что сходимость итерационного процесса для S-параметров идет быстрее, чем для самого поля. Таким образом, получив хорошую точность решения по матрице рассеяния, мы не обязательно получим точное распределение поля. Поэтому, когда вы заинтересованы в его анализе, желательно использовать критерии сходимости более жесткие, чем обычно.
Кроме того, для любого заданного числа адаптивных итераций магнитное поле (Н) рассчитывается менее точно, чем решение для электрического поля (Е), потому что Н-поле вычисляется из Е-поля с помощью следующего соотношения:
![]()
Применение формулы (21) уменьшает на единицу порядок полиномиальной функции, аппроксимирующей поле Н, по сравнению с аппроксимацией электрического поля. Если электрическое поле описывается в пределах ячейки линейной функцией, то магнитное поле, рассчитанное по (21), будет описываться лишь константой, т. е. существенно менее точно.
Программа решения двумерных задач (2D-Solver)
Наряду с решением трехмерных задач HFSS реализует решение двумерных электродинамических задач, которые необходимы для описания полей на портах. Под портом понимается некоторая область на плоскости, совпадающая с поперечным сечением входной линии передачи, образующей порт реального СВЧ-устройства. Известно, что поле в сечении линии передачи можно представить в виде совокупности падающих и отраженных собственных волн с произвольными коэффициентами:
где ![]() и
и ![]() – векторы электромагнитного поля собственной волны с номером п,
– векторы электромагнитного поля собственной волны с номером п, ![]() - комплексная постоянная распространения собственной волны, z - координата, отсчитываемая вдоль оси линии передачи, Ап - коэффициенты, играющие роль амплитуд собственных волн, номера n>0 соответствуют волнам, бегущим в сторону положительных z, n < 0 - в сторону отрицательных z, так как
- комплексная постоянная распространения собственной волны, z - координата, отсчитываемая вдоль оси линии передачи, Ап - коэффициенты, играющие роль амплитуд собственных волн, номера n>0 соответствуют волнам, бегущим в сторону положительных z, n < 0 - в сторону отрицательных z, так как ![]() .
.
Поля собственных волн зависят только от двух координат, лежащих в плоскости поперечного сечения линии передачи, то есть поле собственной волны является решением двумерной граничной задачи. Таким образом, 2D-Solver позволяет найти поля собственных волн линий передачи, образующих порты и удовлетворяющие уравнению, полученному из исходных уравнений Максвелла:

где Е(х, у) — комплексная амплитуда вектора электрического поля, х, у — координаты, описывающие положение точки в плоскости порта, ![]() — оператор Гамильтона,
— оператор Гамильтона, ![]() — волновое число свободного пространства,
— волновое число свободного пространства, — относительная магнитная проницаемость,
— относительная магнитная проницаемость,![]() — относительная диэлектрическая проницаемость,
— относительная диэлектрическая проницаемость,![]() ,
, ![]() — абсолютные диэлектрическая и магнитная проницаемости вакуума.
— абсолютные диэлектрическая и магнитная проницаемости вакуума.
Отметим, что в HFSS ищутся решения стационарных уравнений Максвелла, зависящие от времени следующим образом:
![]()
где  – комплексная амплитуда поля, t — время. Если речь идет о собственной волне линии передачи, то ее поле также выражается через комплексную амплитуду:
– комплексная амплитуда поля, t — время. Если речь идет о собственной волне линии передачи, то ее поле также выражается через комплексную амплитуду:

 – комплексная амплитуда поля собственной волны.
– комплексная амплитуда поля собственной волны.
В электродинамике, изучающей стационарные решения уравнений Максвелла, часто вместо термина «комплексная амплитуда поля» используют просто «поле», имея в виду при этом именно его комплексную амплитуду. Такое упрощение оправданно, поскольку комплексная амплитуда позволяет однозначно определить мгновенное значение поля в любой момент времени t. Поэтому мы тоже далее будем говорить просто поле, а не комплексная амплитуда поля. Отметим следующее обстоятельство: комплексная постоянная распространения собственной волны g в общем случае имеет действительную и мнимую части:
![]() ,
,
где ![]() – постоянная затухания,
– постоянная затухания, ![]() – постоянная распространения.
– постоянная распространения.
В общем случае поле в плоскости порта описывается бесконечным набором собственных волн, однако, на практике имеется иная ситуация. Обычно входные линии одномодовые, то есть они имеют одну распространяющуюся волну. Так как источник возбуждения затухающих волн находится внутри анализируемой структуры (например, внутри СВЧ-многополюсника), то всегда можно отодвинуть плоскость порта достаточно далеко, так, чтобы в его плоскости поле описывалось только полями волн основного типа, бегущими по линии передачи. При этом необходимо иметь в виду, что волн основного типа даже для одномодовой линии передачи две: падающая и отраженная; они отличаются только направлением распространения:
где индекс 1 соответствует основной распространяющейся волне.
Последнее соотношение используется в качестве граничного условия в плоскости порта при решении трехмерной задачи. Иными словами, трехмерное поле в плоскости порта с точностью до постоянных множителей A±1 совпадает с полем собственной волны. Постоянные множители ищутся в ходе решения трехмерной задачи.
Отметим, что множители A±1 определяют элементы матрицы рассеяния СВЧ-многополюсника. Если все входные линии передачи одномодовые, то говорят об одномодовой матрице рассеяния.
3D-Solver
Для расчета полного поля используется волновое уравнение:

HFSS находит электромагнитное поле на поверхностях излучения с помощью 3D-Solver, а затем вычисляет электрическое поле в дальней зоне, используя следующее уравнение:

где S – поверхность излучения;
G – функция Грина свободного пространства, равная:

![]() и
и ![]() – радиус-векторы, определяющие точку «наблюдения (г) и точку на поверхности излучения (г') , соответственно.
– радиус-векторы, определяющие точку «наблюдения (г) и точку на поверхности излучения (г') , соответственно.
Расчет S-параметров по данным расчета поля
Обобщенная S-матрица связывает амплитуды падающих на входы многополюсника волн с амплитудами отраженных волн. Под падающими волнами понимаются волны, бегущие к многополюснику, а под отраженными — бегущие от него.
Например, одномодовая S-матрица для трехпортовой структуры имеет следующий вид:
![]()

![]() – комплексные элементы матрицы рассеяния,
– комплексные элементы матрицы рассеяния,
![]() — амплитуда волны, падающей на вход с номером i, а
— амплитуда волны, падающей на вход с номером i, а ![]() — амплитуда волны, отраженной от входа с номером i, амплитуды падающих и отраженных волн имеют размерность
— амплитуда волны, отраженной от входа с номером i, амплитуды падающих и отраженных волн имеют размерность ![]() ;
;
По умолчанию HFSS вычисляет только одномодовые S-параметры. Однако он может учитывать моды более высокого порядка, если потребуется. Каждая дополнительная мода в каждом порту увеличивает порядок S-матрицы на единицу. Например, чтобы описать поле в трехпортовой структуре с двухмодовыми портами, требуется S-матрица размером 6x6.
В этом случае полезно перейти от матрицы рассеяния к матрицам сопротивлений и проводимостей.
Определение S-матрицы, приведенное выше, не использует понятий характеристического сопротивления линии передачи или сопротивления порта, которое обычно совпадает с вышеуказанным сопротивлением линии, формирующей порт (вообще говоря, последнее условие необязательно, так как часто под портом понимают некоторую нагрузку, которая может иметь комплексное сопротивление, например входное сопротивление усилителя). В то же время эти понятия оказываются полезными, когда речь идет о моделировании сосредоточенных элементов (диоды, транзисторы и т. д.), описание которых идет в терминах эквивалентных схем, токов и напряжений.
Характеристические импедансы
HFSS вычисляет характеристический импеданс каждого порта, чтобы выполнить перенормировку S-матрицы, Z-матрицы или Y-матрицы. Система вычисляет характеристический импеданс каждого порта тремя способами, в зависимости от которого получаются значения Zрi, Zрv или Zvi.
Полное сопротивление Zрi
Zрi: — полное сопротивление, зависящее от величины мощности Р тока I:
![]()
Мощность и ток вычисляются непосредственно из рассчитанных полей. Мощность, проходящая через порт, равна:
![]()
где поверхностный интеграл вычисляется по всей поверхности порта S.
Ток вычисляется с помощью закона Ампера для полного тока путем интегрирования по контуру L:
![]()
Если контур l охватывает все сечение порта, то интеграл будет равен нулю. Дело в том, что в линии передачи, например в двухпроводной линии, токи на разных проводниках имеют одинаковую величину, но направлены в разные стороны. Поэтому под полным током понимают только ток, текущий по одному из проводников. Следовательно, контур l должен охватывать не весь периметр порта, а лишь его часть, включающую проводник, несущий ток в одном направлении.
Полное сопротивление Zрv
Zрv — полное сопротивление, рассчитанное через мощность Р и напряжение V:
![]()
Мощность P вычисляется таким же образом, как и для полного сопротивления ![]() . Напряжение вычисляется следующим образом:
. Напряжение вычисляется следующим образом:
![]()
Путь, по которому система интегрирует вектор Е, определяется импедансной линией, которая задается при введении портов. Для определения импедансной линии порта выбираются две точки, между которыми имеет место максимальная разность потенциалов.
HFSS не может определить самостоятельно, где будет максимальная разность потенциалов, если вы не зададите импедансную линию.
Полное сопротивление Zvi
Полное сопротивление Zvi рассчитывается по формуле:

Для ТЕМ-волн импедансы Zрi, Zрv и Zvi совпадают, для волн, имеющих продольные компоненты полей, Zрi, Zрv становятся верхней и нижней границами фактического характеристического импеданса порта.
Выбор полного сопротивления при решении конкретной задачи
Когда необходимо нормировать обобщенную S-матрицу или вычислить Y- или Z-матрицы, вы должны определить, какую величину использовать для расчета: Zрi, Zрv или Zvi.
Для ТЕМ-волн можно использовать полное сопротивление Zvi, оно совпадает с фактическим полным сопротивлением порта.
• Когда моделируются полосковые линии, больше подходит полное сопротивление Zрi..
Для щелевых структур (типа копланарных волноводов) в большинстве случаи, предпочтительнее полное сопротивление Zpv.
Множители импеданса
Если была определена плоскость симметрии, вычисленное значение полного сопротивления должно быть скорректировано множителем полного сопротивления.
В случаях, когда структуру разделяет Е-плоскость симметрии, системой вычисляется только половина дифференциального напряжения и одна половина потока мощности и вычисленная величина составляет половину истинного значения. В таких случаях должен быть определен множитель полного сопротивления, равный 2.
В случаях, когда структуру разделяет магнитная плоскость симметрии, системой рассчитывается только половина потока мощности, а напряжение вычисляется полностью. Поэтому разделение структур пополам плоскостью магнитной симметрии приводит к вычисленным полным сопротивлениям, в два раза большим, чем для всей структуры. В таких случаях должен быть определен множитель полного сопротивления, равный 0,5.
Многомодовые порты и матрицы рассеяния
Существуют ситуации, для которых одномодовое представление поля в плоскости порта недостаточно. Примером такой ситуации могут служить связанные полосковые линии. В них всегда существуют две распространяющиеся волны. Поэтому, если мы имеем в плоскости порта такие линии, то нам необходимо усложнить соответствующее представление поля:
Аналогичным образом выражение для поля в плоскости порта может быть обобщено на случай произвольного числа волн. Если число учитываемых волн превышает единицу, то говорят о многомодовых портах и многомодовых матрицах рассеяния. Отметим, что размерность одномодовой матрицы рассеяния равна N х N. где N — число портов многополюсника. В тоже время размерность многомодовой S-матрицы равна М х N, где М — число учитываемых волн на всех портах.
Очевидно, что вычисление многомодовой матрицы рассеяния значительно более трудоемкая процедура, которую по возможности следует избегать.
Часто появление высших типов волн связано с тем, что плоскость порта установлена недостаточно далеко от места возбуждения этих волн. В этом случае аппроксимация поля только распространяющейся волной оказывается неверной, и приходится учитывать вклад одной или нескольких запредельных волн.
Границы
Любая плоскость, поверхность объекта или пересечение объектов может быть определена как граница. Границы позволяют задавать такие характеристики, как проводимость или сопротивление, двумерным зонам (плоским поверхностям объекта). Примеры использования границ:
· Вы хотите, чтобы поверхность объекта имела характеристики материала, отличающиеся от тех, которые вы применили к нему при рисовании. Объект может иметь свойства воздуха, но вы можете задать поверхности свойства металла или другого материала.
· Вы имеете излучающую структуру, такую, как антенна. Помещаем антенну внутрь объекта - бокса, затем присваиваем поверхностям бокса излучающую границу, и бокс становится электрически открытым, вы можете рассчитывать антенну, излучающую в открытое пространство.
· Вы можете определить зоны, через которые энергия поступает и выходит из структуры, как этого требует процесс симуляции.
Граничные условия
Существуют следующие типы граничных условий, которые можно применить к поверхностям:
1 Port (Порт)—Port это граничное условие, которое позволяет энергии поступать и выходить из структуры.
2 Perfect H —Perfect H это идеальная магнитная граница. Этот тип границы вынуждает магнитное поле (H-поле) быть нормальным к поверхности, к которой оно приложено.
3 Perfect E—Perfect E это идеальная электрическая граница, это также относится к идеальному проводнику. Этот тип границы вынуждает электрическое поле (Е-поле) быть нормальным к поверхности, к которой оно приложено. Данное граничное условие автоматически присваивается в двух случаях:
· Любой поверхности объекта, которая касается внешней поверхности рассматриваемого объема, ей дается имя _OUTER_.
· К поверхности любого объекта, которому присвоен тип материала Металл (идеальный металл) и дается имя _MATERIAL_.
4 Symmetry Planes—Плоскость симметрии существует в том случае, если структура имеет геометрическую и электромагнитную симметрию, то есть, когда поля в одной половине структуры либо идентичны, либо являются зеркальным отображением полей в другой половине структуры. Плоскость симметрии может рассматриваться, как другие поверхности структуры, и иметь граничные условия. Использование плоскостей симметрии позволяет упростить процесс симуляции и уменьшить время счета в несколько раз.
5 Ground Plane—Плоскость заземления (экранирующая плоскость) рассматривается, как бесконечная идеальная электрическая граница. Если в структуре используются излучающие границы, плоскость заземления является экраном для излучаемой энергии, предотвращающим распространение волн за нее. Экранирующая плоскость используется для моделирования антенн с однонаправленным излучением, так как имеет бесконечные размеры и непрозрачна, в том числе, и для поля в дальней зоне
6 Conductor—Проводник позволяет определить поверхность объекта, как неидеальный (с потерями) проводник. Это не идеальная электрическая граница. Для моделирования вводятся потери в размерности Siemens/meter, и параметры проницаемости позволяют определить поверхность, являющуюся неидеальным проводником. Потери рассчитываться в зависимости от частоты.
7 Resistor—Можно моделировать поверхность или границу, как резистивную, и задать вещественную или мнимую части сопротивления или проводимости в размерности ohms/square.
Сопротивление величина постоянная и не меняется с частотой.
8 Radiation Boundary—Излучающая граница относится к поглощающим границам, позволяет моделировать электрически открытую структуру: волны могут излучаться из структуры по направлению к излучающей границе. Система поглощает волны на излучающей границе, по существу расширяя внешнюю границу структуры до бесконечночти.
Излучающая граница также может быть расположена в относительной близости от структуры и иметь произвольную форму. Это условие исключает необходимость в сферической границе. Для структур, имеющих излучающие границы, рассчитываются S - параметры, учитывающие потери на излучение, а расчет поля в дальней зоне становится неотъемлемой частью процесса симуляции.
9 Restore—Восстановленные граничные условия восстанавливают исходные параметры поверхности объекта, возвращают свойства материала выбранной зоны объекта к первоначальным значениям, отменяя любое наложенное граничное условие. Это не оказывает действия на любые назначения материалов, сделанные через меню Materials. Такие граничные условия используется, например, чтобы смоделировать апертуру рупорной антенны внутри излучающей границы. Эти границы используются главным образом для того, чтобы облегчить процесс определения граничных условий на сложных объектах.
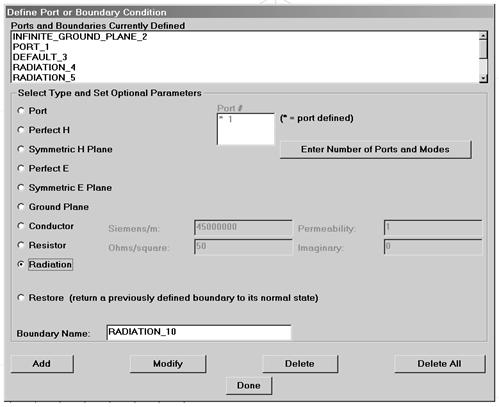
Рисунок 5 – Окно для определения граничных условий
Граничные области
Можно задать положение границ следующими путями:
l 3-point Plane— Плоскость по 3-м точкам: Вы можете определить сплошную плоскость, имеющую определенные граничные условия. Это используется для определения положения плоскости заземления, плоскостей симметрии.
2 3-point Bounded Plane— Ограниченная плоскость: Ограниченная область внутри плоскости, например, одна или более поверхностей объекта, может быть определена как зона и иметь единственное граничное условие. Такой метод удобен для определения портов на концах волновода.
3 Object Name— Имя объекта: Целая поверхность объекта имеет единственное граничное условие. Одно из применений этого способа – симуляция излучения антенны. Для этого необходимо окружить антенну боксом из воздуха, затем присвоить боксу излучающую границу. В процессе симуляции будет учитываться, что поверхность бокса очень далеко и поглощает энергию, таким образом достигается эффект излучения в свободное пространство.
4 Surface Intersection—Пересечение поверхностей: Зона перекрытия двух плоскостей, которой могут быть присвоены граничные условия.
Порядок действия
При присвоении портов и границ следует иметь в виду:
· Порты имеют преимущества над любыми другими граничными условиям, с которыми они частично совпадают.
· Во всех других случаях последующее назначение границы будет переопределять существующие границы, с которыми она пересекается.
Порты и источники
Как уже говорилось выше, решения для собственных волн, полученные для каждого порта, служат граничными условиями для трехмерного поля в структуре, которое должно быть согласовано с этими решениями.
Порты не похожи на другие типы границ. Порт позволяет энергии поступать и выходить из структуры, что является необходимой частью процесса симуляции. Порты применяются, чтобы обозначить зоны, через которые энергия входит и покидает структуру.
Как альтернативу портам можно использовать источники напряжения, это может быть, например, соединение с чем либо, не включенным в структуру (вход транзистора).
Порт должен быть калиброван. Калибровка определяет направление и полярность поля и необходима при расчете напряжений. Также возможно выполнение расчета только портов (ports-only solution) без выполнения полной симуляции.
Это дает данные об относительной напряженности поля, импедансе, постоянной распространения на выбранном порте.
Определение порта
Можно присвоить границу любой плоскости, части плоскости или поверхности объекта, составной части объекта.
Чтобы добавить порт, следует произвести следующие операции:
1 Выбрать Boundaries > Add/Modify.
2 Нажать Enter Number of Ports and Modes.
3 Ввести общее количество портов, которые будут добавлены в структуру на поле Define the Number of Ports. Нажать Ok.
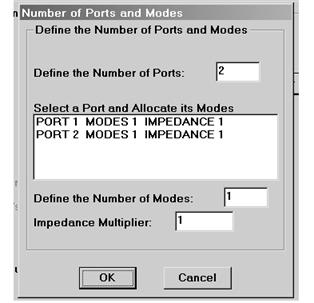
Рисунок 6 – Окно для определения количества портов, мод и множителя импеданса
4 Список портов появится в перечне Select a Port and Allocate its Modes. Если требуется изменить число распространяющихся мод (типов волн), это можно сделать в этом перечне. Все моды будут учтены в процессе симуляции.
5 Нажать OK для завершения определения порта.
6 Выбрать порт из перечисленных, в поле Port # (Port 1 выбирается автоматически, но можно выбрать и другой).
7 Определить зону границы, нажав или 3 Point Plane или 3 Point Bounded Plane или Object Name.
8 Если вы все сделали правильно, имя порта появится на списке портов и границ и (*) появится возле следующего Port #.
Каждый порт должен быть правильно добавлен в структуру, как этого требуют правила симуляции.
9 По окончании нажать Done.
Порты следует откалибровать в следующей последовательности:
· выбрать Boundaries > Port Calibration
· задать координаты начала и конца калибровочной линии, дважды нажать Apply.
· Нажать SOLVE and Display E Field или View Impedance and propagation

Рисунок 7 – Окно для калибровки портов
Черчение структуры в HFSS
Для перехода в режим рисования следует в основном меню нажать Model=>Draw
Вы можете работать сразу с одним, двумя или четырьмя видами (сверху, справа, слева, проекция). Для выбора количества окон для отображения видов следует нажать Window=>Layout.
Для увеличения, уменьшения, перемещения нарисованных объектов, изменения направления обзора предусмотрены специальные команды.
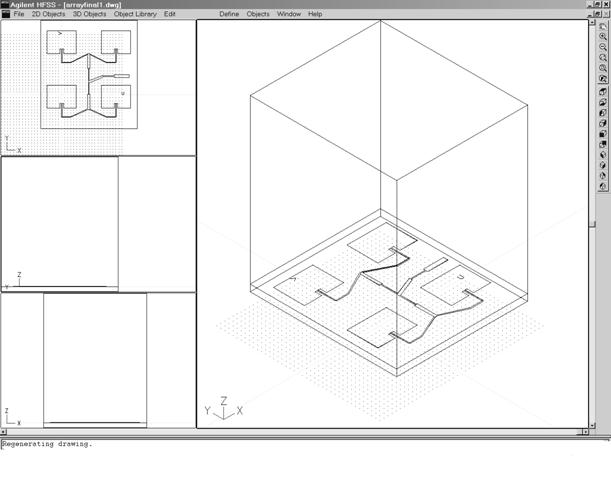
Рисунок 8 – Режим рисования Draw, Main Layout
Перед началом работы следует выполнить установки в окне Window =>Project Preferences, выбрав единицу измерения, размер рисуемой области, параметры сетки.
В HFSS существуют возможности для черчения двумерных и трехмерных объектов.
Для изображения двумерных структур используются следующие объекты: линии, дуги, окружности, эллипсы, прямоугольники и команды, позволяющие создать сложные фигуры Unite (Объединение), Intersect (Пересечение), Subtract (Вычитание).
Для создания трехмерных структур можно использовать объекты: параллелепипед (Box), цилиндр, конус, сфера и команды Unite, Intersect, Subtract, а также Sweep, Revolve, Connect.
Revolve используется для вращения двумерного объекта вокруг линии для создания трехмерного.
Connect создает трехмерный объект, соединяя два двумерных.
Sweep создает трехмерный объект, приподнимая двумерный на определенную высоту.
Вы можете использовать встроенную библиотеку компонентов, для рисования спиралей, мостов, микрополосковых элементов и др.
Для редактирования структуры Edit предусмотрены следующие команды:
Undo - отмена действий;
Move – перемещение объекта по трем координатам;
Copy - копирование объекта по трем координатам, с заданным шагом, количество копий может быть различно;
Scale – масштабирование;
Rotate - поворот вокруг заданной линии на любой угол;
Mirror – зеркальное отображение относительно заданной плоскости;
Slice – отсечение части у трехмерного объекта, может быть использовано для объектов, имеющих плоскости симметрии по E и H.
Delete – удаление объекта, если имеются сложные объекты, полученные, например, после команды Unite, удаление производится последовательно: сначала сложный, затем при необходимости удаляются его составные части;
Unlink - разрыв связи с исходным объектом для возможности редактирования копий.
Object Parameters – редактирование параметров объектов, кроме полилиний и дуг (для них используется 2D Object=>Point=>Move).
Процесс вычисления (Simulation process)
Перед тем, как начать процесс вычисления, следует выдержать следующие критерии:
· Каждый объект, являющийся частью процесса симуляции, должен иметь материальные свойства (металл, воздух, диэлектрик и т. п.).
· По крайней мере один порт или источник должен присутствовать в структуре.
· Должны быть определены все граничные условия.
Шаги для подготовки процесса симуляции включают в себя следующее:
· выбор параметров сетки Solve=>Setup=>Advanced и Solve=>Setup=>Refinement;
· выбор данных для сохранения Solve=>Setup=>Saved Solutions;
· выбор полосы для частотного сканирования Solve=>Setup=>Frequencies =>Fast Frequency Sweep (enable);
· выбор дискретных частот Solve=>Setup=>Frequencies=>Discrete Frequency (enable).
Постпроцессор (Post Processor)
Постпроцессор позволяет просмотреть и проанализировать следующие виды данных: S-параметры, Е и Н поля, поля в дальней зоне, антенные параметры, параметры линии передачи. Данные представлены в виде двумерных и трехмерных графиков в линейном или логарифмическом масштабе в полярной или декартовой системе координат, а некоторые, например, матрица рассеяния, также в виде таблиц. Программой предусмотрено динамическое вращение объекта, масштабирование и перемещение, сохранение и печать графиков и таблиц.
Для запуска постпроцессора нажмите Post => Start Post Processor
Команда постпроцессора Plot используется для отображения S - параметров и параметров линий передачи, Modify для преобразования S – матрицы в Z - и Y-матрицы, Field для построения полей в различных сечениях, Far Field для построения диаграмм направленности антенн и параметров излучения антенн. Display показывает рассматриваемый объект и сетку конечных элементов, Define задает дополнительные плоскости и линии.
На рисунке 10 показано окно для выбора способа изображения полей. Видно, что для этого существуют несколько способов: E, H, Poynting Vector– векторное представление c помощью векторов и линий, а все остальные амплитудные представления с помощью контурных линий, цветных зон, цветных облачков.
Постпроцессор предусматривает также анимацию Field Plot.
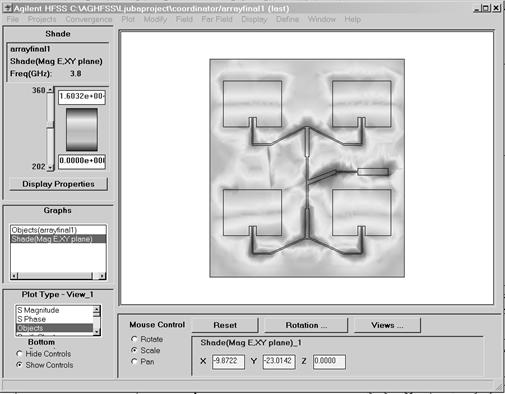
Рисунок 9 – Окно постпроцессора
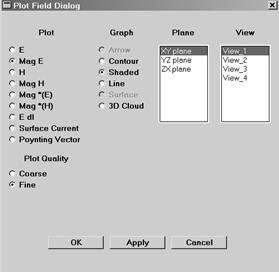
Рисунок 10 – Диалоговое окно для выбора представления полей
Лабораторная работа № 1. Моделирование направляющих систем
Цель работы – Моделирование прямоугольного волновода, коаксиального кабеля, микрополосковой линии передачи.
Порядок выполнения работы:
1 Нарисовать прямоугольный волновод сечением 17х 8 мм, длиной 50…200 мм, используя 3-х мерный объект «Box» в меню рисования, задать материал волновода – воздух (air), в основном меню задать граничные условия (Port1 и Port2), откалибровать порты, выполнить расчет портов (расчет постоянной распространения и входного импеданса), провести расчеты в полосе частот (10…11 ГГц), в постпроцессоре построить графики модуля коэффициента отражения S11, графики распределения поля в различных сечениях, сетку конечных элементов, сохранить все полученные графики в формате jpg.
2 Задать в базе материалов материал оболочки фторопласт (диэлектрическая проницаемость e=2,2, tg d=0.001). Нарисовать коаксиальный кабель со стандартным волновым сопротивлением 50 Ом, используя 3-х мерные объекты «Цилиндр» в меню рисования, диаметр внутреннего проводника 0,8 мм (материал металл), диаметр диэлектрической оболочки 1.9 мм (материал воздух). Для устранения проблемы частичного совпадения фигур необходимо применить команду Subtract (при этом цилиндр меньшего диаметра вычитается из цилиндра большего диаметра), цилиндр меньшего диаметра следует оставить в процессе симуляции и определить ему в качестве материала металл, а новую фигуру считать диэлектрической оболочкой и задать ей материал фторопласт. В основном меню задать граничные условия (Port1, Port2, идеальная Е граница для диэлектрической оболочки), откалибровать порты, выполнить расчет портов (расчет постоянной распространения и входного импеданса) для нескольких частот 0.5, 2, 5, 10, 25 ГГц, провести расчеты в полосах частот (2..4, 10…11 ГГц), в постпроцессоре построить графики модуля коэффициента отражения S11, входного сопротивления, графики распределения поля в различных сечениях, сетку конечных элементов, сохранить все полученные графики в формате jpg.
 |
3 Задать в базе материалов материал подложки ФАФ-4Д (диэлектрическая проницаемость e=2,5, tg d=0.001). Нарисовать подложку размерами 20х50 мм,
 |
высотой 2 мм, используя 3-х мерный объект «Бокс», на верхней поверхности подложки нарисовать отрезок микрополосковой линии длиной 50 мм, шириной 1 мм, над ней нарисовать еще один бокс высотой 20 мм. В основном меню задать граничные условия (Port1, Port2, плоскость заземления), откалибровать порты, выполнить расчет портов (расчет постоянной распространения и входного импеданса) для нескольких частот 2, 3.5, 5 ГГц, провести расчеты в полосе частот (2..4 ГГц) для различных значений ширины микрополосковой линии, в постпроцессоре построить графики модуля коэффициента отражения S11, входного сопротивления, графики распределения поля в различных сечениях, сетку конечных элементов, сохранить все полученные графики в формате jpg.
Содержание отчета
Указать цель работы, привести рассчитанные характеристики для всех типов линий передачи и изображения объектов, выводы.
Лабораторная работа № 2. Моделирование элементов фидерных линий
Цель работы - моделирование микрополоскового бинарного делителя мощности и микрополоскового гибридного кольца.
2.1 Микрополосковое гибридное кольцо
Квадратурное гибридное кольцо (ГК), или шлейфовый направленный ответвитель, является широко используемым СВЧ устройством. Большинство используемых ГК реализовано на микрополосковых линиях (МПЛ), конфигурация микрополоскового ГК изображена на рисунке 12. ГК имеет четыре входа, для реализации требуемых характеристик четыре отрезка МПЛ длиной в четверть волны соединены в квадрат.
Когда все четыре входа ГК нагружены на согласованные нагрузки, сигнал, поданный на вход 1, распределяется по входам 2 и 3, сигнал на входе 4 отсутствует. Сигнал на входе 3 отстает по фазе от сигнала на входе 2 на 90 градусов. Величины сигналов на входах 2 и 3 зависят от отношения импедансов параллельного и последовательного плеч, обычно оно выбирается так, чтобы сигналы были равными. Отметим, что ГК – полностью симметричное устройство, и каждый вход может быть использован для подачи сигнала. При подаче сигнала на вход 4 он разделится между входами 2 и 3, на вход 1 сигнал не поступит. Если сигнал на входе 3 отстает по фазе на 90 градусов от сигнала на входе 2 при возбуждении с входа 1, то при возбуждении с входа 4 происходит опережение на 90 градусов.
Для равного деления мощности должны быть соблюдены следующие соотношения:
Zp=Z0 и ![]() .
.
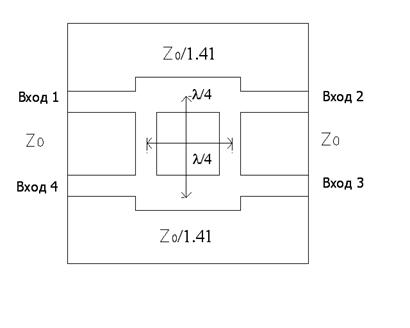 |
Рисунок 12 – Конфигурация гибридного кольца
Для определения длины линий необходимо вычислить значение эффективной диэлектрической постоянной и длины волны в линии на рабочей частоте.
Полоса пропускания ГК составляет примерно 10 %.
ГК является полностью согласованным устройством, взаимодействие между выходными плечами отсутствует. Это свойство весьма желательно для многоэлементных антенн, так как при отсутствии изоляции между выходами элементов они могут влиять друг на друга, что может привести к искажениям в возбуждении. При подключении согласованных нагрузок ГК согласовано по всем входам, в случае несогласованных нагрузок отраженные сигналы попадают на изолированный вход ГК, вход антенны остается согласованным. Это означает, что на изолированный вход следует установить нагрузку для поглощения отраженной мощности. Хотя вход и согласован, происходит некоторая потеря мощности в нагрузке изолированного плеча. В этом случае происходит снижение КПД и КУ антенны.
 |
Рисунок 13 – Модель гибридного кольца
Порядок выполнения работы – Задать в базе материалов материал подложки ФЛАН-2,8-2 (диэлектрическая проницаемость e=2,8, tg d=0,0015). Нарисовать подложку размерами 60х60 толщиной 2 мм, используя 3-х мерный объект «Бокс», на верхней поверхности подложки нарисовать гибридное кольцо, используя фигуры Rectangle в следующей последовательности: со стороны входов прямоугольники 5,3х16,85 с шагом 43,15 мм по координате Х и 21 мм по координате Y, в центре платы изображаем прямоугольники 26,3 х 33,3 и 15,7х15,7, из большого вычитаем малый с помощью команды Subtract2D, объединяем все фигуры с помощью команды Unite2D, сверху рисуем еще один бокс высотой 20 мм. Для корректного определения портов следует нарисовать 4 прямоугольника в ортогональной плоскости (ZOY или ZOX).
В основном меню задать необходимое количество портов, граничные условия (Port1, Port2, Port3, Port4 (порты задаем через Object name), плоскость заземления), откалибровать порты, выполнить расчет портов (расчет постоянной распространения и входного импеданса) для частоты 2,45 ГГц, провести расчеты в полосе частот (2,2..2,6 ГГц), в постпроцессоре построить графики модулей коэффициента отражения S11, S22, S33, S44, модулей коэффициентов передачи S12, S13, S14, фаз коэффициентов передачи S12, S13, S14, входного сопротивления, графики распределения поля в различных сечениях, сетку конечных элементов, сохранить все полученные графики в формате jpg.
2.2 Бинарный (3-дБ) делитель мощности
 |
Делитель обеспечивает равное по амплитуде и синфазное деление входной мощности, такие делители используются для питания антенных решеток и в СВЧ устройствах.
Входные линии делителя имеют одинаковое значение импеданса Z0. В точке разветвления выходные линии делителя соединены параллельно, следовательно, импеданс в этой точке имеет значение  . Для согласования этого сопротивления с входной линией следует использовать четвертьволновый согласующий трансформатор – отрезок линии передачи с импедансом
. Для согласования этого сопротивления с входной линией следует использовать четвертьволновый согласующий трансформатор – отрезок линии передачи с импедансом  .
.
 |
Длина участка, имеющего волновое сопротивление Z1, должна составлять четверть длины волны в микрополосковой линии
 , при этом необходимо учесть небольшое укорочение электрической длины, связанное с накоплением энергии в месте резкого изменения ширины линии, примерно равное половине толщины подложки.
, при этом необходимо учесть небольшое укорочение электрической длины, связанное с накоплением энергии в месте резкого изменения ширины линии, примерно равное половине толщины подложки.
Порядок выполнения работы – используя проект из предыдущей работы, подберем ширины линий, обеспечивающие волновые сопротивления Z0 и Z1 (начальную ширину линии с сопротивлением Z1 выбираем в пределах 1…2 мм) на подложке ФАФ -4Д толщиной 2 мм, рассчитаем длину четвертьволнового участка, нарисуем делитель мощности на плате произвольного размера. Над платой нарисовать бокс.
 |
В основном меню задать количество портов, граничные условия (Port1, Port2, Port3, плоскость заземления), откалибровать порты, выполнить расчет портов (расчет постоянной распространения и входного импеданса) для частоты 2,45 ГГц, провести расчеты в полосе частот (2,2..2,6 ГГц), в постпроцессоре построить графики модуля коэффициента отражения S11, модулей коэффициентов передачи S12, S13, фаз коэффициентов передачи S12, S13, входного сопротивления, графики распределения поля в различных сечениях, сетку конечных элементов, сохранить все полученные графики в формате jpg.
Содержание отчета – краткое описание изучаемых элементов, рисунки, выводы.
Лабораторная работа № 3. Моделирование микрополосковых антенных решеток
Цель работы – Моделирование микрополоскового излучателя (отработка габаритных размеров, положения точки запитки (возбуждения), моделирование антенной решетки с параллельной схемой питания).
В качестве микрополоскового излучателя (МПИ) могут служить прямоугольники, треугольники, диски, кольца и др. фигуры, создающие с помощью соответствующего способа возбуждения поле как с линейной, так и с круговой поляризацией. Наиболее распространены прямоугольные и круглые МПИ.
Проектирование МПИ начинается с выбора материала подложки. Основные электрические параметры, которые следует учитывать при проектировании МПИ – относительная диэлектрическая постоянная ![]() и тангенс угла потерь. Большое значение диэлектрической постоянной приводит к меньшим размерам МПИ, но снижает полосу частот и требует более жестких допусков при изготовлении. Большие значения тангенса угла потерь снижают КПД антенны. В общем, следует выбирать подложку с наименьшей допустимой при данных размерах антенны диэлектрической постоянной, толщину подложки следует выбирать как можно большей для увеличения полосы частот и КПД, однако не настолько большой, чтобы появилась возможность эффективного возбуждения поверхностных волн. При максимальной рабочей частоте толщина подложки должна удовлетворять условию
и тангенс угла потерь. Большое значение диэлектрической постоянной приводит к меньшим размерам МПИ, но снижает полосу частот и требует более жестких допусков при изготовлении. Большие значения тангенса угла потерь снижают КПД антенны. В общем, следует выбирать подложку с наименьшей допустимой при данных размерах антенны диэлектрической постоянной, толщину подложки следует выбирать как можно большей для увеличения полосы частот и КПД, однако не настолько большой, чтобы появилась возможность эффективного возбуждения поверхностных волн. При максимальной рабочей частоте толщина подложки должна удовлетворять условию
![]()
где с – скорость света, ![]() - относительная диэлектрическая постоянная. Если система должна работать в узкой полосе частот, важна стабильность диэлектрической постоянной. Нестабильность
- относительная диэлектрическая постоянная. Если система должна работать в узкой полосе частот, важна стабильность диэлектрической постоянной. Нестабильность ![]() приведет к уходу резонансной частоты МПИ и может снизить процент выхода годных приборов.
приведет к уходу резонансной частоты МПИ и может снизить процент выхода годных приборов.
Важную роль при выборе подложки играют механо - климатические требования, предъявляемые в техническом задании на проектирование. Некоторые подложки подвержены сильной деформации при воздействии высокой температуры, что может привести к изменению размеров и соответственному снижению параметров. Механические свойства подложки, такие, как диапазон рабочих температур, коэффициент линейного расширения, теплопроводность, жесткость или гибкость необходимо согласовать с требованиями, предъявляемыми к системе. И, наконец, весьма важным может оказаться соотношение «параметры – стоимость».
Обычно при проектировании МПА в диапазоне СВЧ используются такие подложки, как ФЛАН, ФАФ. Они имеют хорошие электрические характеристики. При проектировании низкочастотных и цифровых печатных плат широко используются стеклотекстолиты. Их большими преимуществами являются низкая стоимость и простота обработки. Однако большие значения тангенса угла потерь и диэлектрической постоянной ограничивают их применение частотами до 1 ГГц.
Следующие шаги - выбор способа возбуждения и геометрических размеров МПИ. МПИ можно возбудить несколькими способами (врезка, апертурное возбуждение через щель, зонд).
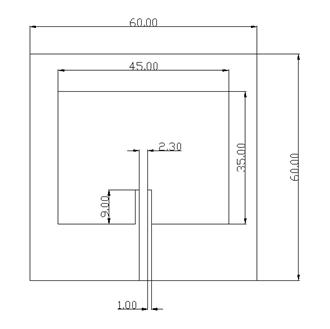 |
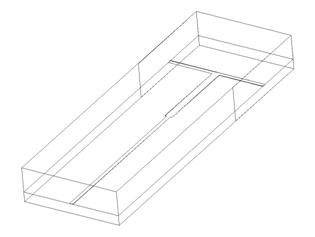
В данной работе будет рассмотрен прямоугольный МПИ, возбуждаемый с помощью врезки микрополосковой линии, габаритные размеры представлены на рисунке 16. Размеры платы 60х60 мм, размер излучателя 35х45 мм ширина фидерной линии 2,3 мм, глубина врезки 9 мм, зазоры между МПЛ и МПИ по 1 мм.
Рисунок 16 – Прямоугольный излучатель, возбуждаемый микрополосковой линией
Порядок выполнения работы:
Моделируем МПИ заданного размера на подложке ФЛАН 2,8-2,0, выполнив следующие шаги:
· с помощью объекта BOX рисуем подложку;
· с помощью прямоугольников рисуем излучатель, врезку и микрополосковую фидерную линию с таким расчетом, чтобы было удобно регулировать глубину врезки (используем комбинацию прямоугольников).
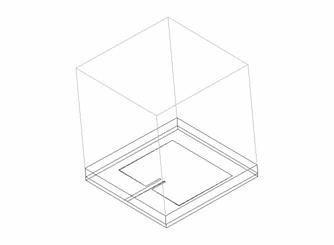
· рисуем над платой BOX высотой 5 мм и BOX высотой 35 мм.
· задаем граничные условия: Port1, Ground Plane и 5 излучающих границ (Radiation Boudries), являющихся гранями куба.
Общий вид проекта изображен на рисунке 17.
Производим расчет в полосе частот 2.2…2.6 ГГц, изменяя глубину врезки, добиваемся минимального значения S11 на резонансной частоте.
 |
 |
Моделируем синфазную решетку 2х2 с шагом[1] 80 мм по координате Х и 80 мм по координате Y в следующей последовательности: копируем излучатель по Х и по Y с помощью команды COPY, рисуем делитель мощности, размеры представлены на рисунке 18. Начальные координаты платы (-30;-50) (левый нижний угол), 1 излуча, -15) (левый нижний угол). МПЛ линия содержит не только прямые участки, но и изгибы (неоднородности). Поворот с обрезкой угла не вносит рассогласования, и поэтому практически "прозрачен" для любого сигнала. Однако, такой поворот электрически короче физического расстояния, отсчитываемого по средней линии поворота. Оптимальным является срез примерно на 2/3 от общей длины L (см. рисунок 19).
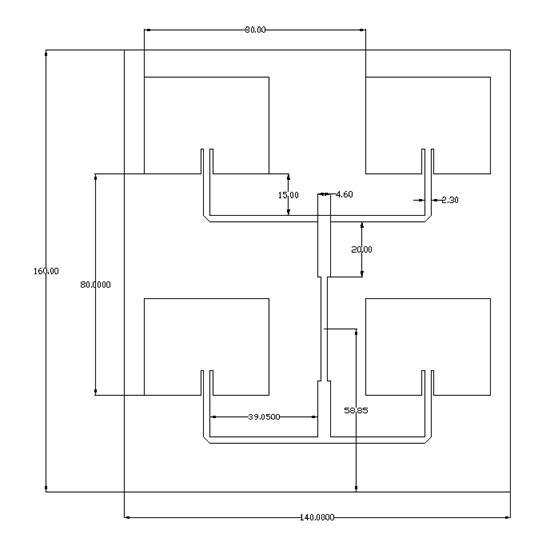
Рисунок 18 – Синфазная микрополсковая антенная решетка
 |
Размеры платы 140х160 мм, материал ФЛАН-2,8-2,0, на платой рисуем BOX высотой не менее 40 мм.
Рисунок 19
В основном меню задаем излучающие границы (количество портов-0, Groud Plane, Radiation Planes - 5 шт.). В качестве источника возбуждения используется не порт, а SOURCE (Источник), который определяется через Boundaries=>Voltage Sources=>Source#1=>координаты точки возбуждения (72.5 по Х и 58.85 по Y, Z (0,-2).
Проверим излучающие границы через Boundaries=>Display.
Производим расчет в полосе частот 2.2-2.6 ГГц, в постпроцессоре построим график модуля S11, распределения поля, объемную диаграмму направленности (ДН), диаграммы в главных сечениях, сравним антенные параметры в полосе частот.
Содержание отчета: внешний вид одного МПИ и решетки, графики модуля S11, распределения поля, объемная ДН, диаграммы в главных сечениях, антенные параметры для частоты, соответствующей минимальному КСВН (модулю S11).
Лабораторная работа № 4. Моделирование волноводно-щелевых антенных решеток
Щели в качестве излучающих элементов или самостоятельных антенн широко используются в технике СВЧ, при этом применяются в основном щели в волноводах. Волноводно-щелевые линейные решетки (ВЩР) обеспечивают сужение диаграммы направленности в плоскости, проходящей через продольную ось волновода, и являются одним из видов линейных многоэлементных антенн.
Возбуждение щели в волноводе происходит, если она своей широкой стороной пересекает поверхностные токи, текущие по внутренним стенкам. Как известно, щель, прорезанная в волноводе, нарушает режим работы волновода, вызывая отражение электромагнитной энергии, часть энергии излучается, остальная проходит дальше по волноводу. Таким образом, щель является несогласованной нагрузкой для волновода, в которой рассеивается часть мощности, эквивалентная мощности излучения.
При построении волноводно-щелевой решетки на основе прямоугольного волновода с волной основного типа Н10 необходимо учитывать, что в волноводе имеют место продольный и поперечный поверхностные токи на широких стенках и поперечный ток на узких стенках. Таким образом, неизлучающими являются продольная щель, расположенная на середине широкой стенки (нейтрали) волновода, и поперечная щель, прорезанная в узкой стенке волновода. Все остальные щели в той или иной степени излучают и могут быть представлены эквивалентной схемой в виде сопротивления или проводимости, соответствующим образом включенной в волновод. Основные эквивалентные схемы и формулы для вычисления входящих в них сопротивлений и проводимостей приведены, например, в [4].
Форма ДН определяется амплитудно-фазовым распределением в раскрыве антенны. На практике наиболее часто используются следующие виды амплитудных распределений: равномерное, спадающее к краю, экспоненциальное, распределение Дольфа-Чебышева. Фазовое распределение чаще всего линейное.
Различают волноводно-щелевые антенны резонансного и нерезонансного типа. Резонансные антенны предназначены для излучения по нормали к апертуре антенны и представляют собой отрезок волновода с короткозамыкателем на конце. При возбуждении волновода в нем формируется стоячая волна, щелевые излучатели должны располагаться в пучностях напряжения стоячей волны с шагом, равным длине волны в волноводе. Так как длина волны в волноводе превышает длину волны излучения в свободном пространстве, при расположении щелевых излучателей по одну сторону от нейтрали (так называемое прямофазное возбуждение) в диаграмме направленности неизбежно будут присутствовать не менее двух дифракционных максимумов. Наличие трех лепестков одинаковой амплитуды в большинстве случаев не приемлемо. Для устранения дифракционных лепестков применяется переменно-фазное возбуждение – соседние щели размещаются по разные стороны от нейтрали, а шаг решетки выбирается равным половине длины волны в волноводе. В этом случае фазовый сдвиг между соседними щелями по волноводу равен 180 градусам, а за счет противоположного направления возбуждающих поперечных токов на стенке волновода добавляется дополнительный фазовый сдвиг 180 градусов. Суммарный сдвиг фазы между каждой парой щелей в случае переменно-фазного возбуждения равен в результате 360 градусам, таким образом, щели находятся в фазе и излучают по нормали к апертуре. Так как обычно половина длины волны в волноводе меньше длины волны в свободном пространстве, все дифракционные лепестки при таком способе возбуждения находятся вне области видимых углов. Для наклонных щелей в узкой стенке прямоугольного волновода аналогичный эффект достигается чередованием знака угла наклона соседних щелей в решетке.
Нерезонансные антенны предназначены для формирования диаграммы направленности с отклонением луча в плоскости, проходящей через продольную ось антенны. На конце антенны устанавливается согласованная нагрузка, таким образом, в волноводе поддерживается режим бегущей волны. Возможно применение как прямофазного, так и переменно-фазного способов возбуждения антенны. В решетках с прямофазным возбуждением щели располагаются с шагом, несколько превышающем половину длины волны в свободном пространстве, угол наклона ДН определяется обычным соотношением из теории антенн бегущей волны
 ,
,
где b - коэффициент замедления основной волны волновода.
В случае переменно-фазного возбуждения угол наклона зависит от расстояния между излучателями и коэффициента замедления:
С помощью правильного выбора комбинации значений замедления, периода решетки и номера луча m можно получить почти любое значение угла наклона главного максимума от 0 до 180 градусов. При этом необходимо контролировать значение периода решетки с целью недопущения выхода дифракционных лепестков в область видимых углов.
Поскольку расстояние между щелями в нерезонансных решетках отличаются от λв/2 , отражения от отдельных щелей в значительной мере компенсируют друг друга и входной коэффициент стоячей волны по напряжению (КСВН) близок к единице в довольно широкой полосе частот. И только на частоте, при которой d= λв/2 , отражение от щелей суммируются, КСВН резко возрастает и излучение, которое должно быть направлено по нормали к оси волновода, резко уменьшается (так называемый эффект «нормали»).
Связь щелей с волноводом подбирается таким образом, что в оконечный поглотитель доходит только% входной мощности решетки и КПД оказывается равным 95- 80%.
Чтобы сохранить режим бегущей волны вдоль нерезонансной волноводно-щелевой решетки и избавиться от нежелательного «зеркального» луча, обусловленного движением отраженной бегущей волны в сторону генератора, необходимо использовать достаточно слабую связь щелей с волноводом. Это достигается подбором угла наклона щелей на узкой стенке волновода или подбором координат середин щелей на широкой стенке волновода. Надлежащим выбором связи различных щелей можно сформировать и желаемый закон изменения амплитуды возбуждения вдоль антенны.
В целом волноводно-щелевые резонансные и нерезонансные решетки отличаются большим разнообразием принимаемых способов возбуждения щелей и при параллельном расположении многих щелевых линеек позволяют создавать антенны с высокой направленностью. Основные преимущества таких антенн:
· отсутствие выступающих частей и компактность волноводной распределительной системы, что особенно важно при применениях антенн на борту летательных аппаратов и СБЛ;
· возможность сравнительно легкой реализации в раскрыве требуемых амплитудных распределений поля (путем регулирования связи щелей с волноводом, изменяя смещение или угол наклона щели).
Однако существенным недостатком волноводно-щелевых антенн является ограниченность рабочей полосы частот, в первую очередь из-за нежелательных отклонений луча при изменении частоты (в нерезонансных антеннах), а также из-за нарушения согласования входа.
Примерный порядок расчета волноводно-щелевых решеток;
При разработке или проектировании ВЩР исходными данными могут быть ширина ДН в двух главных плоскостях или в одной (Dq0.5) и уровень боковых лепестков; коэффициент направленного действия D0.
Вначале выбирается тип волноводно-щелевой антенны. Если задано угловое положение главного максимума ДН qгл, не равное 90 градусам, и антенна должна обеспечивать работу в полосе частот, выбирают нерезонансную антенну. При излучении по нормали к апертуре необходимо использовать резонансную антенну. Далее находится расстояние между излучателями в выбранном для построения антенны волноводе заданного диапазона частот. В резонансной антенне с переменно-фазными щелями d=λв/2. В нерезонансной антенне величина d выбирается в зависимости от типа возбуждения решетки – прямофазного или переменно-фазного. Затем выбирается амплитудное распределение по антенне, обеспечивающее ДН с заданным уровнем боковых лепестков. По известному теперь амплитудному распределению находится длина антенны (соответственно и число излучателей), обеспечивающая требуемую ширину ДН на уровне половинной мощности (-3дБ).
Далее расчет ведется в следующем порядке.
На основании общей эквивалентной схемы антенны рассчитываются эквивалентные нормированные проводимости gn (или сопротивления rn) всех N щелей антенны.
Зная gn или rn, по соответствующим формулам [4] определяется смещение х1 центра щелей относительно середины широкой стенки волновода (нейтрали) или угол их наклона g в боковой стенке.
При известном местоположении щелей на стенке волновода и их ширине по данным находится резонансная длина щелей в волноводе.
Вычисляются ДН, КНД и коэффициент усиления антенны.
Кроме электрического расчета собственно антенны рассчитываются питающая линия и возбудитель; когда требуется по заданию на проектирование, подбирается необходимый волноводно-коаксиальный переход и определяются его основные характеристики.
Ширина щели в волноводно-щелевой антенне выбирается, исходя из условий обеспечения необходимой электрической прочности и требуемой полосы пропускания.
Ширина щели определяется из соотношения:
На практике ширина щели выбирается равной 0.1...0.2 от длины щели.
Если щель заполнена диэлектриком или закрыта диэлектрической пластиной, ее электрическая прочность увеличивается.
Затем рассчитывается количество излучателей решетки N, выбирается шаг решетки d и ее длина L в соответствии с заданным законом распределения амплитуд и длина щели l:
![]()
![]()
 .
.
Данные параметры связаны с шириной главного максимума ДН следующим выражением:
где коэффициент ![]() учитывает закон распределения амплитуды возбуждающих токов, табличное значение коэффициента выбирается в зависимости от уровня первого бокового лепестка.
учитывает закон распределения амплитуды возбуждающих токов, табличное значение коэффициента выбирается в зависимости от уровня первого бокового лепестка.
Затем на основе выбранного амплитудного распределения поля в решетке определяются смещения щели относительно центральной линии широкой стенки (нейтрали) волновода и проводимости.
Рассматриваемая в данной лабораторной работе антенна представляет собой переменно-фазную решетку из шести излучателей на волноводе 19 x 4 мм2, заканчивающимся короткозамкнутой стенкой, смещение центров всех щелей от нейтрали волновода 2 мм (см. рисунок 20).
При одинаковом смещении реализуется равномерное амплитудное распределение.
Из соображений более удобной компоновки следует использовать переменно-фазное возбуждение излучателей, обеспечивающее излучение подводимой СВЧ мощности в заднюю полусферу по отношению к направлению движения волны по волноводу антенны.

Рисунок 20 – Схема расположения щелей
Порядок выполнения работы:
· Рисуем волновод размером 19х4 мм длиной 101 мм с помощью объекта BOX (материал воздух);
· с помощью прямоугольников на верхней поверхности волновода рисуем щели шириной 2 мм в соответствии с рисунком 10, следует соблюдать расстояние от последней щели до короткозамкнутой стенки волновода (2,8 мм).
· На этой же поверхности рисуем прямоугольник 19х101 мм. С помощью команды SUBTRACT вырезаем в нем 6 щелей (материал металл), затем с помощью SWEEP поднимаем на 0.05 мм, придавая таким образом конечную толщину волноводной крышке.
· рисуем над волноводом BOX высотой 40 мм (без учета SWEEP от уровня Z=0, материал воздух).
· задаем граничные условия: Port1 и 5 излучающих границ (Radiation Boundaries).
· проводим расчет в полосе частот 9.4…9.8 ГГц.
· в постпроцессоре построим график модуля S11, распределения поля в плоскости щелей и над решеткой, объемную диаграмму направленности (ДН) на резонансной частоте (для частоты, соответствующей минимальному КСВН (модулю S11), диаграммы в главных сечениях, сравним антенные параметры в полосе частот.

Рисунок 21 – Модель ВЩАР
Содержание отчета: внешний вид решетки, графики модуля S11, распределения поля, объемная ДН, диаграммы в главных сечениях, антенные параметры для частоты, соответствующей минимальному КСВН (модулю S11).
Лабораторная работа № 5. Моделирование микрополосковой антенны с круговой поляризацией
Цель работы – Моделирование микрополосковой антенны (отработка габаритных размеров, координат точки запитки.
В некоторых случаях требуется применение антенн с круговой поляризацией. Например, если трудно заранее определить требуемую ориентацию антенны с линейной поляризацией. Наиболее типичные примеры такой ситуации – мобильная спутниковая связь, связь с самолетами и другими подвижными объектами. В других ситуациях круговая поляризация может быть удобной потому, что она не требует ориентировать антенну относительно поляризации сигнала. Круговые поляризации правого и левого вращения являются ортогональными, это может быть использовано для удвоения емкости канала связи. Антенны систем GPS, тоже требуют применения круговой поляризации. Это не только снимает необходимость ориентировать антенну, но и приводит к увеличению принятого сигнала и уменьшению эффектов многолучевого распространения. Существуют различные способы получения круговой поляризации: использование квадратного микрополоскового излучателя (МПИ), возбуждаемого двумя фидерами с соответствующим образом подобранными амплитудами и фазами; изменение формы МПИ таким способом, что он излучает поле круговой поляризации при возбуждении с одного входа.
В данной работе предлагается исследовать круглый МПИ со смещенной точкой запитки и вырезами, предназначенными для возбуждения двух взаимоортогональных колебаний со сдвигом фаз 90°.
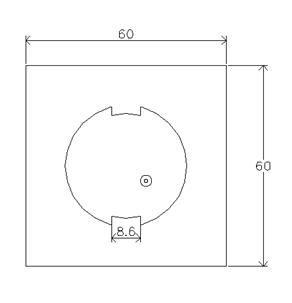
Рисунок 22 – Излучатель с эллиптической поляризацией
Размеры платы 60х60х4 мм, размер излучателя: наружный радиус 18,2 мм, радиус внутреннего кольца 15,7 мм, ширина выреза 8,6 мм, координаты точки запитки (6, -4,5) относительно центра излучателя.
Порядок выполнения работы:
1 Моделируем МПИ заданного размера на подложке ФЛАН 2,8-4,0, выполнив следующие шаги:
· Задать в базе материалов материал подложки ФЛАН-2,8-4 (диэлектрическая проницаемость e=2,8, tg d=0.0015).
· с помощью объекта BOX рисуем подложку толщиной 4 мм;
· с помощью кругов радиусом 18,2 мм рисуем излучатель (Circle 0) и вспомогательный круг радиусом 15,7 мм (Circle 1) и с помощью прямоугольников вырезы шириной 8,6 мм и произвольной глубины. С помощью команды Subtract2D вычитаем Rectangle 0 и Rectangle 1 из Circle 0, а с помощью команды Unite2D объединим полученную фигуру с Circle 1. Произведем следующее действие:
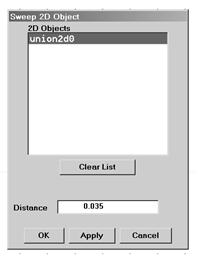
Рисунок 23 – Параметры команды SWEEP
· Таким образом, получим излучатель, имеющий реальную толщину фольги 35 мкм.

Рисунок 24 – Модель МПА с эллиптической поляризацией
· задаем граничные условия: число портов 0, Ground Plane и 5 излучающих границ (Radiation Boundaries), являющихся гранями куба.
· задаем источник SOURCE (Источник), который определяется через Boundaries=>Voltage Sources=>Source#1=>координаты точки возбуждения.
Производим расчет со следующими параметрами:

Рисунок 25 – Параметры точности расчета

Рисунок 26 – Определение полосы частот для расчета
В постпроцессоре построим график модуля S11, через Field=>Set Exitation=>Add Selected Source установим частоту возбуждения 2,6 ГГц, построим распределения поля, поляризационные диаграммы в двух главных сечениях (Far Field=>Cut 3D Far Field=> Theta Cut при постоянном значении Theta = 90 и двух Phi 0 и 90), поляризационная диаграмма строится следующим образом: Far Field=>Plot Far Field Cut=>Circle Axial Ratio.
Изменяя ширину и глубину выреза, значения координат точки питания в небольших пределах (десятые доли миллиметра), добейтесь минимального значения поляризационного отношения (значение должно быть наиболее близко к 0…2 дБ).
Содержание отчета: внешний вид антенны, графики модуля S11, распределения поля, объемная ДН, диаграммы в главных сечениях, графики поляризационного отношения, антенные параметры для частоты, соответствующей минимальному КСВН (модулю S11).
Лабораторная работа № 6. Моделирование волноводно-коаксиального перехода
В зависимости от условий эксплуатации применяются различные варианты конструкций переходов от коаксиальной линии к волноводу. Изменением соответствующих размеров можно добиться согласования полных сопротивлений перехода почти любой геометрической формы для частотного диапазона, в котором волновод и коаксиальная линия пропускают только свои низшие типы волн. Поскольку размеры переходов обычно являются критичными и имеются случаи, когда желаемые электрические характеристики не могут быть получены при помощи простой конструкции, следует использовать дополнительные простейшие устройства, при помощи которых можно было бы получить заданную характеристику полного сопротивления.
В данной работе предлагается исследовать переход зондового типа. Поперечное сечение волновода 18,6х4 мм, диаметр внутреннего проводника кабеля 0.75 мм, диаметр изоляции 2,8 мм, материал изоляции фторопласт (e=2,2, tg d=0.001), начальное расстояние от оси симметрии зонда до задней закороченной стенки волновода 5,9 мм, начальная высота зонда 3,5 мм.
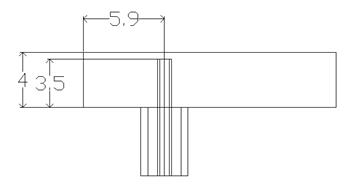
Рисунок 27 – Схема ВКП
Порядок выполнения работы:
Задать в базе материалов материал оболочки фторопласт (диэлектрическая проницаемость e=2,2, tg d=0.001)
· Нарисовать прямоугольный волновод сечением 18,6 х 4 мм, длиной 30 мм, используя 3-х мерный объект «Box» в меню рисования, задать материал волновода – воздух (air),.
· Нарисовать коаксиальный кабель со стандартным волновым сопротивлением 50 Ом, используя 3-х мерные объекты «Цилиндр» в меню рисования, диаметр внутреннего проводника 0,75 мм (материал металл), диаметр диэлектрической оболочки 2.8 мм (материал воздух). Длина кабеля равна 1 сантиметру. Для устранения проблемы частичного совпадения фигур необходимо применить команду Subtract (как бы цилиндр меньшего диаметра вычитается из цилиндра большего диаметра), при этом цилиндр меньшего диаметра следует оставить в процессе симуляции и определить ему в качестве материала металл, а новую фигуру считать диэлектрической оболочкой и задать для нее материал фторопласт.
· Нарисовать на продольной оси симметрии волновода зонд с помощью фигуры «Цилиндр», диаметр зонда 1 мм, задать в качестве материала металл.
· В основном меню задать граничные условия: Port1 – коаксиальный вход, Port2 – волноводный выход, Restore (Default – место стыковки кабеля с волноводом, задается как ограниченная плоскость по диаметру диэлектрической оболочки), откалибровать порты, выполнить расчет портов (расчет постоянной распространения и входного импеданса) на частоте 9,5 ГГц, волновое сопротивление для первого порта примерно равно 50 Ом.
· для разных размеров зонда (высоты и диаметра), расстояния до задней стенки волновода, провести расчеты в полосе частот (9…10,5 ГГц). Выбрать оптимальные размеры, обеспечивающие наилучшее (наименьшее) значение S11 (-25 дБ) в частотном диапазоне.
· в постпроцессоре построить графики модуля коэффициента отражения S11, графики распределения поля в различных сечениях, сетку конечных элементов, сохранить все полученные графики в формате jpg.
Рисунок 28 – Модель ВКП
Содержание отчета: внешний вид, основные геометрические размеры, график модуля S11, распределения полей.
Список используемой литературы:
1 Agilent High-Frequency Structure Simulator 5.6 User’s Guide. Agilent Technologies Inc. 2000.
2 Метод конечных элементов для радиоинженеров и инженеров-электриков:Пер. с англ.-М.:Мир, 1986.
3 , , Разевиг и оптимизация трехмерных СВЧ структур с помощью HFSS. Под редакцией д. т.н., проф. -М.: СОЛОН-Пресс, 2004.
4 Проектирование фазированных антенных решеток / , и др. Под ред. , - М.: Радио и связь, 1981 г.
5 Справочник по расчету и конструированию СВЧ полосковых устройств /, и др., под ред. .-М.: Радио и связь, 1982 г.
[1] Шаг между излучателями может лежать в пределах 0, 5l…0,9 l, где l - длина волны в свободном пространстве.
